CAPÍTULO DÉCIMO SEGUNDO
PLANOS ESTRUTURAIS
4.0. PLANO DE SINCRONISMO TELEFONICO.
1. Introdução
1.a) A Causa de Deslizamentos em Equipamentos Digitais de Comutação
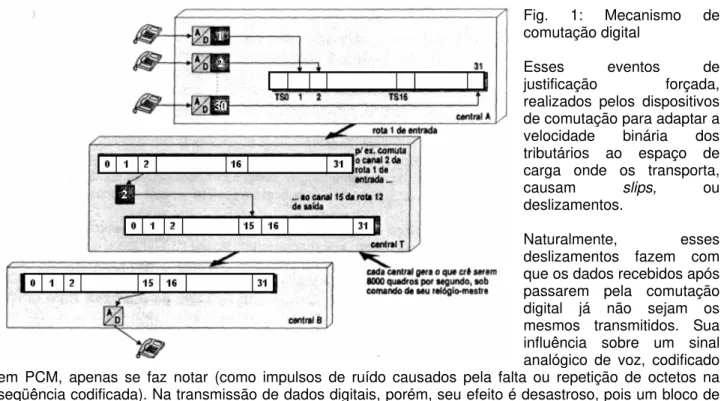
O advento de centrais de comutação e cross-connects digitais trouxe consigo a necessidade de sincronizar os sinais tributários comutados por esses dispositivos com os espaços de carga destinados a eles nos quadros PCM primários. Um dispositivo que realiza comutação de sinais digitais extrai os sinais tributários dos sinais multiplexados que a ele chegam, e os volta a copiar em espaços de carga nos quadros que está gerando. Os quadros gerados por esses dispositivos têm sua velocidade controlada pelo oscilador-mestre que possuem. No quadro PCM primário, não estão previstos mecanismos de adaptação dos tributários de 64 kbit/s ao espaço de carga representado pelos intervalos de tempo. Logo, se os relógios dos elementos de rede que estão gerando os tributários não são exatamente iguais aos relógios que comandam a geração dos quadros, o espaço previsto não terá a capacidade exata necessária para o transporte desses tributários. As tolerâncias especificadas para os relógios permitem pequenas variações, de tal forma que se os dispositivos que realizam a comutação de sinais digitais funcionam de forma plessiócrona, a carga não poderá passar incólume pelo processo de comutação. Se o tributário a ser copiado em um intervalo de carga tiver sua velocidade um pequeno "delta" maior que a do espaço de carga em que está sendo copiado, periodicamente o dispositivo de comutação ver-se-á obrigado a deixar de transmitir pequenas porções da informação. Se, ao contrário, o tributário possuir velocidade inferior à prevista no espaço de carga, o dispositivo terá que introduzir pequenas porções de informação sempre que não houver carga suficiente para encher o espaço de carga.
Fig. 1: Mecanismo de comutação digital
Esses eventos de justificação forçada, realizados pelos dispositivos
de comutação para adaptar a velocidade binária dos tributários ao espaço de carga onde os transporta, causam slips, ou deslizamentos.
Naturalmente, esses deslizamentos fazem com que os dados recebidos após passarem pela comutação digital já não sejam os mesmos transmitidos. Sua influência sobre um sinal analógico de voz, codificado em PCM, apenas se faz notar (como impulsos de ruído causados pela falta ou repetição de octetos na seqüência codificada). Na transmissão de dados digitais, porém, seu efeito é desastroso, pois um bloco de dados que contenha um deslizamento é um bloco com erros, requerendo sua repetição.
Fig. 2: Como ocorrem os deslizamentos (slips) no processo de comutação.
Ainda mais afetados são outros novos serviços, como é o caso de vídeo comprimido e de dados encriptados; ao ocorrer um deslizamento, o vídeo pode congelar a imagem por vários segundos, e o desencriptador pode requerer a retransmissão da chave, diminuindo a confiabilidade do método.
A quantidade de deslizamentos permitida em rede para um sinal comutado de 64 kbit/s é definida na Rec. G.822 do UIT-TSS (ex-CCITT).
Na prática, uma central ou cross-connect não deveria causar mais que aprox. 1 deslizamento a cada 72 horas. Ao chegarem a um dispositivo de comutação, os quadros de 2 Mbit/s são armazenados temporariamente em uma memória elástica (memória FIFO). O comprimento dessa memória é suficiente para armazenar dois quadros inteiros. Tipicamente, essa memória está cheia até a metade, ou seja, guarda um quadro inteiro. Pequenas diferenças de fase com valor médio zero (como as causadas por jitter) podem ocasionar uma variação instantânea no nível de enchimento dessa memória. Um deslizamento ocorre (para todos os tributários de certo quadro que chega ao dispositivo de comutação) cada vez que os limites da memória elástica são excedidos. Ou seja, se a diferença de fase acumulada entre o relógio do sinal que chega (relógio de escrita) e o relógio com que a informação é extraída da memória (relógio de leitura) excede a 256 bits, a central despreza o conteúdo de um quadro inteiro (deslizamento negativo) ou repete a carga de um quadro inteiro (deslizamento positivo).
As diferenças de velocidade dos relógios, portanto, são o que causa os deslizamentos. O jitter de fase geralmente não causa deslizamentos, pois seu período é muito curto, não se mantendo uma diferença positiva ou negativa de fase entre os relógios durante um tempo suficiente para acumular uma diferença tão grande. O mesmo não ocorre com o wander, cujo período pode ser muito longo, mantendo-se a diferença instantânea de velocidades por um tempo suficiente para acumular a defasagem que causa os slips.
Para ter uma idéia da quantidade de deslizamentos que centrais comuns operando de forma plessiócrona podem gerar, tomemos o exemplo de uma central tandem com precisão de 1 x 10-6 em seu oscilador-mestre, unindo duas centrais locais com relógios de precisão 2x10-6. Supondo uma diferença de velocidades de 1 x 10-6 entre os relógios de duas centrais consecutivas no circuito, vemos que há uma diferença de (1 x 10-6 x (2,048 x 106 bits/s), ou seja, de 2.048 bits a cada segundo. Como um deslizamento ocorre cada vez que a diferença acumulada alcança 256 bits, ocorrerá um deslizamento a cada 256 / 2.048 = 125 segundos, ou seja, 86400 / 125 = 691 deslizamentos por dia. Este valor seria francamente inaceitável para transmissão de dados. Cada deslizamento controlado causa um bloco de dados errado, gerando um segundo com erro (ES); a quantidade máxima admissível de ES (pela Rec. G.821) é muito menor que essa.
1.b)A Sincronização das Redes de Transporte e a Problemática da SDH
Para evitar todos os problemas descritos acima para a comutação de tributários do quadro PCM primário, o processo de multiplexação das redes de transporte incorpora um mecanismo especial que permite justificar a velocidade do tributário à velocidade do espaço de carga previsto para ele nos sinais multiplexados a partir do segundo nível hierárquico.
inverte o valor dos bits de controle de justificação existentes ao longo do quadro. Dessa maneira, o demultiplex entrega em sua interface de saída somente os bits líquidos do tributário.
Esse processo faz com que o sinal demultiplexado, entretanto, seja degradado. O relógio do sinal tributário presente à saída do demultiplex é corrigido em função da quantidade de bits de informação que estão sendo extraídos do quadro por unidade de tempo.
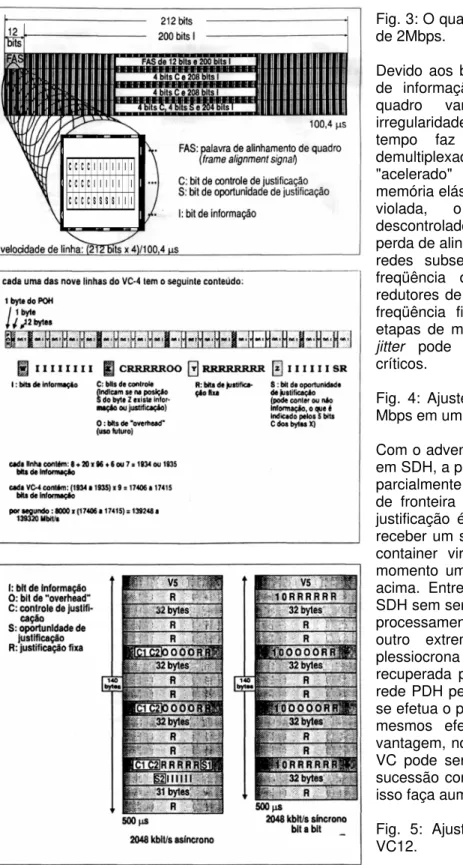
Fig. 3: O quadro de 8Mbps – Ajuste dos tributários de 2Mbps.
Devido aos bits de justificação, o número de bits de informação do tributário extraídos de cada quadro varia de forma irregular. Essa irregularidade no número de bits por unidade de tempo faz com que o relógio do sinal demultiplexado tenha que ser constantemente "acelerado" e "freiado" para que a pequena memória elástica através da qual passam não seja violada, o que causaria deslizamentos descontrolados, que por sua vez causariam uma perda de alinhamento de quadro nos elementos de redes subseqüentes. As componentes de alta freqüência desse jitter são eliminadas pelos redutores de jitter, mas as componentes de baixa freqüência ficam no sinal. Passando por vária etapas de multiplexação e demultiplexação, esse jitter pode acumular-se até alcançar valores críticos.
Fig. 4: Ajuste de relógio de um tributário de 140 Mbps em um VC4.
Com o advento das redes de transporte baseadas em SDH, a problemática da justificação de bits fica parcialmente resolvida, pois somente nos multiplex de fronteira entre a PDH e a SDH é que essa justificação é feita. Um multiplex de fronteira, ao receber um sinal da PDH, copia seus bits em um container virtual (VC) da SDH, fazendo nesse momento uma justificação semelhante à descrita acima. Entretanto, esse VC é transportado pela SDH sem ser aberto, ou seja, sem que se haja um processamento dessa justificação. Somente no outro extremo do trajeto, quando a carga plessiocrona do tributário PDH tem que ser recuperada para ser entregue a um elemento de rede PDH pelo demultiplexador de fronteira é que se efetua o processamento da justificação, com os mesmos efeitos deletérios descritos acima. A vantagem, no entanto, em relação à PDH é que o VC pode ser copiado e rateado através de uma sucessão complexa de quadros de linha sem que isso faça aumentar o jitter de justificação.
Fig. 5: Ajuste de um tributário de 2 Mbps em VC12.
no caso do container virtual de quarta ordem (VC-4). Para poder manejar eventuais pequenas diferenças de velocidade entre o VC e seu espaço de carga (TU ou AU), os multiplex e cross-connects da SDH permitem uma justificação do VC à TU ou AU. Essa justificação é realizada com auxílio dos ponteiros. Seu mecanismo é muito simples. Cada TU ou AU possui um ponteiro associado a ela. Dentro da área do ponteiro, há um byte (três bytes no caso da AU-4) que normalmente não contém bytes de informação do VC, mas que pode transportar um byte (ou três) do VC se este for mais rápido que o espaço normal previsto para ele (justificação negativa). É também possível uma justificação positiva: se o VC for mais lento que a área de carga prevista para ele, o dispositivo pode deixar de enviar um byte (ou três) na área contígua à área mencionada de justificação negativa.
Toda vez que um elemento de rede SDH faz uma justificação, ele efetua um movimento de ponteiro para indicar ao elemento de rede seguinte que os bytes extras contêm carga (no caso de justificação negativa) ou que os bytes contíguos a esses deixam de conter carga (no caso de justificação positiva). E, é claro, o elemento de rede introduzirá um movimento de ponteiro toda vez que a defasagem dentre o VC e a TU ou AU respectiva alcançar um byte (ou três bytes, no caso do VC-4).
Durante o transporte do tributário pela rede SDH, essas justificações não causam problemas, pois todo o sinal existe virtualmente, em memórias internas dos elementos de rede. Entretanto, no extremo do trajeto o VC terá que ser demultiplexado para que seja recuperado o sinal PDH transportado nele. Além dos problemas da justificação de bits nos multiplex de fronteira, temos aqui um problema adicional causado pelos movimentos de ponteiro. O movimento de ponteiro (justificação de bytes em vez de bits) fará com que nas memórias que vão recebendo os bits do tributários entrem 8 bits (24 bits no caso do VC-4) a mais ou a menos quando ocorrem. Como dentro de um tempo muito curto pode haver outro movimento de ponteiro, o demultiplexador tem que fazer com que a memória regresse a seu valor normal imediatamente. Para isso, vê-se obrigado a alterar fortemente a velocidade dos bits na interface plessiócrona, acelerando o relógio (no caso de justificação negativa) ou tornando-o mais lento (no caso de justificação positiva). Se logo outro movimento de ponteiro não segue ao primeiro, o relógio deve voltar ao valor normal quando a memória regressa a seu nível normal de preenchimento.
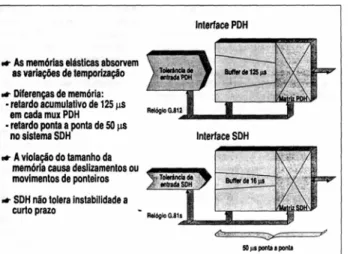
Fig 6: Interfaces PDH e SDH para redes mistas
Alguns fabricantes dimensionam as memórias elásticas dos demultiplexadores de fronteira de forma a poder suportar dois movimentos de ponteiro no mesmo sentido; desta forma, contam com uma "reserva tática" que lhes permite alterar o relógio com toda a calma, pois se vier outro movimento de ponteiro a memória o absorverá. Se, no entanto, essa reserva esgotar-se, a ação terá que ser imediata. Esses fabricantes chegam a desenvolver observações inteligentes do comportamento dos movimentos de ponteiro a longo prazo, permitindo que os demultiplexadores calculem um relógio médio estável que corresponda à velocidade real da carga, sendo os eventuais movimentos manejados dentro da memória elástica. Este procedimento, no entanto, só funcionaria para cargas de velocidade constante ligeiramente distinta à dos dispositivos por onde passam.
Variações aleatórias ou periódicas, como as causadas por jitter e wander continuariam causando problemas.
Essa característica das redes SDH faz com que se chegue a duas conclusões de vital importância:
1. É desejável sincronizar todos os elementos das redes SDH para reduzir os movimentos de ponteiro ao mínimo exigido pelo inevitável wander nas redes.
2. Não se deve utilizar diretamente como referência de sincronismo um sinal de 2 Mbit/s transportado pela rede SDH. As observações e medições já feitas indicam ser necessário buscar um método alternativo.
Este método prevê a existência de pelo menos dois nós em um anel SDH dotados de relógios de alta estabilidade, inclusive com respaldo eficiente no caso de faltar a referência. Para esses nós, sugere-se o uso de referências de estrato 2 (ou relógio de nó de trânsito ÆTNC Æ do UIT-TSS). Uma solução que vem sendo utilizada nos Estados Unidos é a implementação de unidades externas de relógio com respaldo de osciladores de rubídio (ou, em certos casos, de cristais em câmara térmica) que, por sua vez, recebem até 4 referências externas -- por exemplo, o relógio da rede rastreável a um padrão primário (césio) por duas vias distintas, e dois receptores de GPS (Global Positioning System), de onde se extraem sinais de relógio rastreáveis ao tempo mundial coordenado (composto por 20 césios localizados em Paris).
Pouco a pouco as empresas de telecomunicações estão migrando de uma rede de sincronismo puramente hierárquica, onde todos os sinais de sincronização provêm de uma única referência primária de rede, para uma arquitetura de rede de sincronismo onde utilizam várias referências primárias em pontos distribuídos da rede, todas elas rastreáveis a uma referência universal.
1.c) Métodos de Sincronização de uma Rede Digital de Comutação
O efeito tão daninho à transmissão de dados foi o que exigiu que as empresas de telecomunicações começassem a preocupar-se cada vez mais com a questão do sincronismo. Especialmente quando um usuário muito crítico dos enlaces de dados digitais a 64 kbit/s entra em cena, como é o caso da sinalização por canal comum, é preciso limitar o número de deslizamentos, fazendo com que a rede não exceda os limites da Rec. G.822. Em princípio, há três formas de fazer com que todos os tributários na rede funcionem à mesma velocidade. A primeira seria fazer com que cada central de comutação possuísse um relógio próprio de altíssima exatidão; esse relógio, além de comandar a geração dos quadros primários (e conseqüentemente seus espaços de carga) também comandaria os relógios dos equipamentos que geram os sinais tributários (codecs PCM e equipamentos de dados digitais); desta forma, todas as centrais
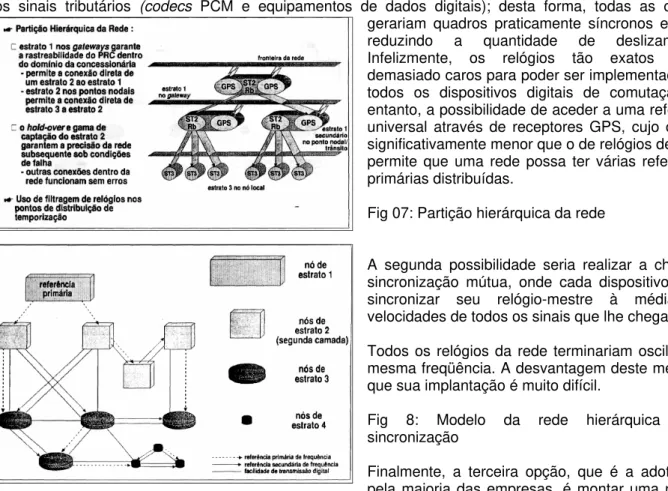
gerariam quadros praticamente síncronos entre si, reduzindo a quantidade de deslizamentos. Infelizmente, os relógios tão exatos seriam demasiado caros para poder ser implementados em todos os dispositivos digitais de comutação. No entanto, a possibilidade de aceder a uma referência universal através de receptores GPS, cujo custo é significativamente menor que o de relógios de césio, permite que uma rede possa ter várias referências primárias distribuídas.
Fig 07: Partição hierárquica da rede
A segunda possibilidade seria realizar a chamada sincronização mútua, onde cada dispositivo busca sincronizar seu relógio-mestre à média das velocidades de todos os sinais que lhe chegam.
Todos os relógios da rede terminariam oscilando à mesma freqüência. A desvantagem deste método é que sua implantação é muito difícil.
Fig 8: Modelo da rede hierárquica de sincronização
Finalmente, a terceira opção, que é a adotada pela maioria das empresas, é montar uma rede hierárquica de distribuição de uma referência principal de rede a todos os dispositivos que requerem sincronizar-se.
A referência de rede, ou seja, o relógio primário, deve estar pelo menos duplicada para evitar que a rede perca sua referência em caso de falhar ou necessitar verificação e calibração.
Cada dispositivo que requer sincronização deve receber o sinal de referência pelo menos por duas vias distintas, preferivelmente transmitido através de um suporte físico. Para evitar a falta de uma referência, deve-se enviar a cada estação, além disso, os relógios de pelo menos duas fontes distintas. Essas fontes devem ser de hierarquia superior ou igual à da estação que os está recebendo. Na rede, não deve haver mais que quatro níveis hierárquicos, ou estratos, no que se refere à qualidade dos relógios. Além disso, se possível, deve-se evitar cascateamentos excessivos do sinal recuperado para distribuí-lo aos equipamentos dentro da estação.
1.d) Problemas das Redes Hierárquicas Tradicionais e sua Solução
Um dos problemas das atuais redes hierárquicas de distribuição de sincronismo é que geralmente os projetos não contemplam unidades especiais de recuperação, monitoração e distribuição do relógio de referência às unidades que o requerem em cada estação. Usando os recuperadores de relógio das centrais, por exemplo, não se tem sempre a garantia de que sejam eliminadas as distorções que o sinal de referência que chega à estação pode ter. E, o que é pior, as saídas de relógio para sincronizar outros equipamentos nem sempre são de qualidade adequada e em número suficiente. Às vezes pode ser necessário cascatear os relógios, fazendo-os passar por vários equipamentos, de forma sucessiva. A qualidade desse relógio, após passar por três ou quatro etapas desse tipo, pode ser francamente inadequada.
Fig. 9: Uso do BITS/SSU em uma estação de tamanho médio
Outro problema que resulta da não-adoção de uma infraestrutura dedicada para o sincronismo dentro das estações é o fato de que seguir a pista de um sinal de referência pode chegar a ser bastante complexo. Ao instalar um novo equipamento que requeira o sinal de sincronismo na estação, pode, neste caso, ser difícil conseguir prontamente uma referência limpa. Além disso, o remanejamento de um equipamento qualquer que esteja na cascata de sinais de sincronismo prejudica os equipamentos que o seguem, e é preciso restaurar rapidamente o caminho seguido pelo sincronismo. Como muitos dos equipamentos podem ser de responsabilidade de grupos distintos de operação, a administração de uma infraestrutura desse tipo torna-se extremamente complicada.
Estes problemas foram já vivenciados pelas empresas de telecomunicações que operam redes grandes, principalmente quando vendem serviços de interconexão de redes de dados a velocidades médias e altas.
As primeiras empresas a preocupar-se com isto foram as do grupo Bell nos Estados Unidos. Os problemas experimentados fizeram com que a Bellcore elaborasse um plano de sincronização da rede digital (Bellcore Technical Advisory TA-NWT-000436, Issue2, junho de 1993).
Esse plano descreve a qualidade dos relógios nos vários níveis da cadeia de sincronismo, definindo dois conceitos da infraestrutura de sincronização: a parte inter-
estações (inter-office) e intra-estação (intra-office). Este novo conceito da parte intra-estação incorpora um bastidor que realiza as funções de recuperação, limpeza e composição dos relógios de referência recebidos para gerar um relógio-mestre da estação, respaldado por um oscilador próprio do bastidor. Este oscilador pode ser de vários tipos, dependendo do estrato a que pertence a estação onde o sistema está instalado.
Quando faltam as referências, o sistema entra em holdover, mantendo a freqüência adequada por um tempo especificado.
qualidade. E, por fim, um sistema de monitoração observa constantemente o próprio sistema e as referências, gerando mensagens de alarmes e resultados de medições de qualidade dos relógios em uma interface para um sistema de gestão computadorizado.
A infra-estrutura interna das estações (intra-office) recebe o nome de BITS (Building Integrated Time Supply) na documentação da Bellcore. As administrações européias passaram a adotar um conceito similar, chamando-o SSU (Synchronization Supply Unif). Um exemplo da implementação prática deste conceito são os Distribuidores de Relógios Digitais, realizados segundo os preceitos dos planos da Bellcore e do UIT-TSS.
Fig10: Uso do BITS/SSU em uma estação de grande porte
Quanto à rede inter-estações, também houve que tecer considerações importantes a seu respeito.
Fundamentalmente, buscou-se uma solução para o problema da distribuição dos sinais de referência, especialmente quando a rede de transporte é uma rede SONET ou SDH. Ademais, tratou-se também da questão da rastreabilidade (traceability) dos relógios à referência primária da rede.
Trataremos em seguida de descrever algumas das recomendações da Bellcore para a sincronização das redes, assim como as do UIT-TSS sempre que disponíveis.
2) Normas e Recomendações sobre as Redes de Sincronismo (Sincronismo Inter-Estações)
As Recomendações do UIT-TSS utilizadas como base para esta discussão de questões de sincronização de redes foram as Recs. G.810 ("Considerações sobre Questões de Sincronização e Temporização"), G.811 ("Requerimentos quanto à Saída de Relógios de Referência Primária Compatíveis com a Operação Plessiócrona de Enlaces Digitais Internacionais"), G.812 (novo draft proposto em 1993; "Requerimentos quanto à Temporização à Saída dos Relógios Compatíveis com a Operação Plessiócrona de Enlaces Digitais Internacionais"), G.81s (draft proposto em 1993; "Características de Temporização de Relógios Escravos Compatíveis com a Operação de Equipamento SDH") e G.825 (draft; "O Controle de Jitter e Wander em Redes Digitais Baseadas na Hierarquia Digital Síncrona").
Além dessas, as discussões basearam-se nas recomendações da Bellcore, especialmente a TA-NWT-000436 ("Plano de Sincronização da Rede Digital") e TR-TSV-000772 ("Requerimentos Genéricos de Sistemas para o Suporte de Serviços de Dados Comutados a Multimegabits").
Outras referências utilizadas foram a prática Telebrás 210-110-001 ("Manual de Sincronismo") e a Norma Fundamental de Sincronismo e Plano Nacional de Sincronização de empresas de telecomunicações de países vizinhos.
A primeira consideração importante sobre a rede de sincronização é que o controle de deslizamentos no quadro primário e dos ajustes de ponteiros na SDH exige que todos os relógios da SDH e dos quadros primários operem à mesma freqüência, dentro de limites realizáveis. Este objetivo pode ser realizado através da implantação de uma rede de sincronização que transmite e distribui às várias estações do sistema referências rastreáveis a uma Fonte de Referência Primária (em inglês: PRS, Prímary Reference Source), que é um relógio de alta precisão.
Não havendo falhas nos enlaces de sincronização ou dentro das estações, a precisão e a estabilidade dos sinais de referência de cada estação está muito próxima da qualidade da referência primária. Qualquer estação que recebe uma referência rastreável à referência primária e gera, por sua vez, um sinal de saída de referência para outras estações denomina-se um relógio intermediário. Infelizmente, todos os relógios intermediários degradam um pouco a estabilidade da temporização. A experiência prática demonstra que é preciso limitar o número de relógios intermediários.
A qualidade dos relógios é descrita a partir de três parâmetros:
1. Precisão em oscilação livre - descreve o desvio de freqüência fracionário máximo admissível de um relógio que nunca tenha sido sincronizado a uma referência, ou que tenha entrado em holdover por um tempo longo, de dias ou semanas.
2. Estabilidade em holdover- descreve o desvio de freqüência que o relógio apresenta após ter perdido a referência. No passado, referia-se ao holdover de um certo estrato em termos da razão de drift e da quantidade de deslizamentos no estrato inferior. Atualmente, o holdover se define também para depois do primeiro dia, e é descrito em termos de seus componentes de desvio inicial, drift e temperatura.
3. Pull-in I Hold-in - definidos como a capacidade que tem um relógio de lograr ou manter sincronismo com uma referência que pode estar corrida em freqüência. O relógio deve possuir uma gama de pull-in I hold-in pelo menos tão ampla quanto sua precisão em oscilação livre. Com isto se garante que um relógio de certo nível hierárquico pode lograr e manter sincronismo com um relógio do mesmo estrato ou de um estrato superior.
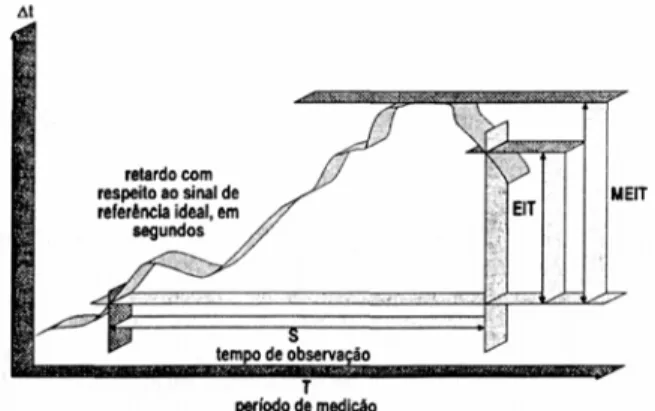
Uma vez que a estabilidade de um relógio de referência primária é definida por uma assíntota de 1x10-11 , teríamos um erro de fase igual a um período da onda (360°) a cada 13,5 horas aproximadamente. A freqüência de variação do retardo temporal, sendo tão baixa, seria extremamente difícil de medir. Devido a este fato, adota-se um parâmetro básico para medir esse fenômeno; esse parâmetro é chamado EIT (Erro de Intervalo de Tempo), e descreve a instabilidade de fase a curto prazo. Para interpretá-lo usa-se outro parâmetro, chamado MEIT (Máximo Erro de Intervalo de Tempo).
Fig 11: Hierarquia de sincronização
A estabilidade dos relógios é medida basicamente, portanto, por seu MEIT (Máximo Erro de Intervalo de Tempo), chamado em inglês MTIE (Maximum Time Interval Error). Para medir o MEIT, primeiro é preciso medir continuamente durante todo o período de observação o retardo temporal de um oscilador relativamente ao Tempo Universal Coordenado (UTC), resultando numa curva que descreve como varia o retardo temporal ao longo do tempo.
Para analisar o MEIT, define-se uma "janela" de certa duração (por exemplo, de 100 ns), a qual faz-se correr sobre a curva, obtendo-se para cada posição da janela um EIT (Erro de Intervalo de Tempo), chamado em inglês TIE (Time Interval Error); o EIT corresponde à diferença entre os erros nos extremos da janela em cada posição desta. O máximo valor de EIT obtido ao utilizar todos os valores possíveis de duração da janela é o MEIT para aquele tempo de observação. Ou seja, o MEIT representa a diferença entre os valores máximo e mínimo do retardo temporal de um sinal de relógio relativamente a uma referência ideal (UTC) em todo o período de observação.
Fig 12: Erro de Intervalo de Tempo (EIT) e Máximo Erro de Intervalo de Tempo (MEIT)
Como expressão matemática temos que:
MEIT (S) = max x(t) - min x(t)
Fig 13: Máscaras para o MEIT
A instabilidade de freqüência em longo prazo é determinada dividindo-se o valor do MEIT pela duração S do período de observação, à medida que S vai aumentando. A instabilidade em curto prazo equivale ao quociente EIT / S. Como exemplo da exigência quanto ao MEIT, relacionamos os valores máximos de MEIT em um período de observação de S segundos recomendados pelo UIT-TSS para um relógio de referência primário:
• 100 S ns para um intervalo de 0,05 < S < 5 s • (5 S + 500) ns para um intervalo de 5 < S < 500 s • (0,01 S + X) ns para um intervalo de S > 500 s
A assíntota designada de 10-11 refere-se à instabilidade de freqüência em longo prazo; algumas administrações suportam uma assíntota de 7x10-12 baseada na tecnologia moderna de relógios de referência primária.
O valor de X ainda encontra-se em estudo. Hoje admite-se provisoriamente um valor de 3000 ns, mas há administrações que suportam um valor de 1000 ns.
Sendo o wander uma variação muito lenta da fase de um sinal relativamente à referência estável, ele pode ser caracterizado em termos do MEIT. Os períodos típicos de observação são de 10, 100 e 1000 segundos, mas a rigor ainda não foi estabelecido nenhum padrão.
Quando se toma como referência não o Tempo Universal Coordenado (UTC), e sim um oscilador real de alto desempenho, essa medida passa a chamar-se MERIT (Máximo Erro Relativo de Intervalo de Tempo), ou, em inglês, MRTIE (Maximum Relative Time Interval Error).
Com o desenvolvimento de um novo método de representar os erros dos relógios que descreve as formas de onda das variações dos relógios, tornou-se possível adotar novos parâmetros para analisar os erros de maneira mais precisa. Uma vez que o jitter e o wander geralmente são constituídos por conjuntos de freqüências de componentes complexos, os erros de sincronismo podem ser vistos como um certo número de formas de onda que modificam a fase e a freqüência do sinal.
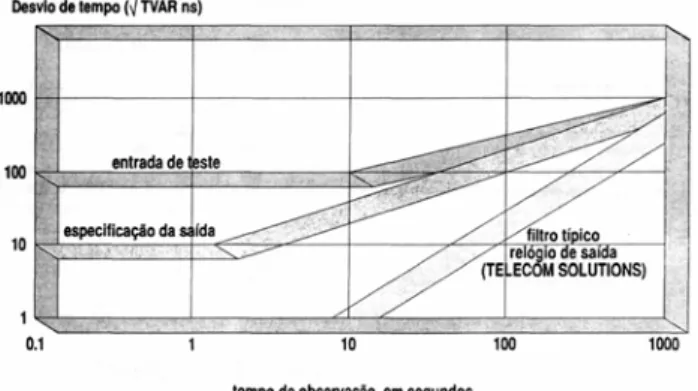
Um exemplo dessas novas medidas é o TVAR (Time Variance), já definido pela Bellcore e citado pelo UIT-TSS. Essa medida representa um valor "r.m.s" (eficaz) de várias freqüências, provendo uma grandeza mais representativa que o MEIT. Outros parâmetros, como o ZTIE (Z-Transform Time Interval Error) são atualmente objeto de estudos pelos especialistas em questões de sincronismo.
Fig 14: Desempenho da temporização
No caso do UIT-TSS, a referência de rede chama-se PRC (Primary Reference Clock). Os relógios de estrato 2 chamam-se TNC (Transit Node Clock) e os de estrato 3 chamam-se LNC (Local Node Clock).
2.a) Estrato 1 e PRS (Referência Primária de Sincronismo)
Uma observação importante sobre os relógios de referência primária é que por definição, um relógio de estrato 1 deve possuir uma precisão a longo prazo melhor que 10" de maneira totalmente autônoma em relação a outras referências. As únicas referências atualmente disponíveis que correspondem a esse critério de estrato 1 são as de feixe de césio. No entanto, também por definição, uma referência primária de sincronismo de uma rede (PRS) consiste em um equipamento capaz de gerar um sinal de temporização cuja precisão a longo prazo mantém-se a 10 -11 ou melhor relativamente ao UTC (Tempo Universal Coordenado). O PRS pode gerar um sinal de
feixe de césio. De forma alternativa, porém, a PRS pode não ser completamente autônoma, caso no qual pode empregar um controle direto a partir do UTC através de serviços de tempo e freqüência.
Conseqüentemente, qualquer relógio de estrato 1 pode ser utilizado como PRS. Por outro lado, porém, cada vez mais se utilizam PRSs que não são relógios de estrato 1. Os exemplos típicos são PRSs que utilizam como referência os serviços de tempo e freqüência dos sistemas de navegação LORAN-C e GPS (Global Positioning System).
O sistema LORAN-C é um sistema baseado em terra, desenvolvido para navegação marítima e operado pela Guarda Costeira norte-americana. O GPS é um sistema de navegação por satélite desenvolvido pelo Departamento de Defesa dos Estados Unidos, sendo operado pela Força Aérea norte-americana. Em ambos casos, os sinais são controlados por padrões de césio, de estrato 1. Portanto, as PRSs derivadas desses sistemas serão rastreáveis a um relógio de estrato 1.
As PRSs empregando a tecnologia GPS podem ser implementadas em qualquer parte do planeta, com a vantagem de serem bastante econômicas.
2.b) Estrato 2 e TNC (Transit Node Clock)
Tipicamente, os relógios de estrato 2 são baseados na tecnologia de osciladores de cristal em câmara térmica dupla ou osciladores atômicos de rubídio.
Devido à alta estabilidade dos osciladores utilizados e com o fito de melhorar tanto quanto possível a estimativa para o holdover, os relógios de estrato 2 apresentam constantes de tempo muito grandes ao tirar a média de sua referência de entrada, o que geralmente torna necessário algum tipo de implementação por controle numérico.
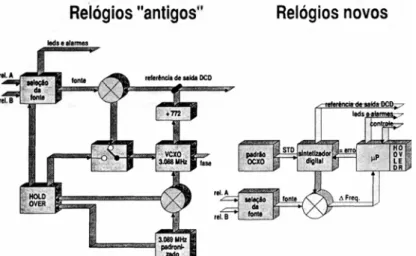
Fig 15: Tecnologia de relógios.
Historicamente, os relógios de estrato 2 faziam parte de centrais tandem. Entretanto, houve uma evolução em termos de realização do conceito de BITS (SSU).
No passado, a rede intra-edifício era meramente conceitual. Hoje, considera-se necessária a realização efetiva de um gerador de temporização independente, ou seja, o conceito evoluiu para um TSG BITS (Timing Signal Generator Building Integrated Time Supply).
Com esta evolução, cada vez mais estão-se empregando TSGs em estações com centrais tandem e congêneres como relógios de estrato 2.
No passado não se considerava imprescindível a utilização de duas referências de entrada ou comutação automática de proteção, devido à qualidade do holdover de certos relógios de estrato 2. Entretanto, como a sincronização vem adquirindo uma importância crescente devido a novas tecnologias e novos serviços, a condição de holdover torna-se indesejável, mesmo a nível de estrato 2. As novas normas exigem hoje que existam pelo menos duas referências e comutação automática de proteção.
2.c) Estrato 3 e LNC (Local Node Clock)
O estrato 3 é o nível seguinte ao estrato 2 em termos de desempenho em condição de holdover. A diferença entre os estratos 2 e 3 é marcante.
Os relógios de estrato 3 baseiam-se geralmente em osciladores a cristal compensados em temperatura, sendo que alguns fabricantes realizam esses relógios com controle numérico.
Os relógios de estrato 3 geralmente são utilizados associados a centrais locais ou como relógios escravizados a estações que contam com relógios de estrato 2.
Os novos relógios de estrato 3E, portanto, para cumprir com esses requerimentos deverão ter que ser equipados com osciladores a cristal em câmara térmica (OCXO) e filtragem digital.
As normas norte-americanas para relógios de redes digitais privadas prevêem a classificação "estrato 3ND", semelhante ao estrato 3 exceto por não ter seu hardware duplicado, não sendo, por conseguinte, adequado para redes públicas.
Fig 16: Arquiteturas típicas de relógio
Fig 17: Recomendações para a tecnologia de relógios
2.d) Estrato 4
Os relógios deste estrato não são utilizados na rede de distribuição de sincronismo entre estações; eles não provêem holdover, entrando em oscilação livre ao perder a referência. Sua aplicação típica é em centrais privadas, como um PBX digital. Nas redes públicas, seu uso restringe-se a bancos de canais digitais, concentradores remotos e equipamentos similares. Muitos desses relógios só recebem uma referência.
Fig. 18: Resumo das especificações para o desempenho de osciladores.
3. Distribuição de Sincronismo dentro da Estação (Sincronização Intra-Estação)
O plano de distribuição de sincronismo dentro das estações, chamado BITS (Building Integrated Time Supply) nos Estados Unidos e SSU (Synchronization Supply Utility) na Europa, requer que cada estação seja equipada com um relógio-mestre, o qual sincroniza a todos os demais relógios da estação. Logo, esse será o único relógio a receber uma referência externa. Naturalmente, esse relógio-mestre deve pertencer a um estrato igual ou superior ao estrato a que pertence cada um dos demais relógios da estação.
Além das razões óbvias para sua implantação (essencialmente, atender à necessidade de sincronizar os quadros de PCM primário e seus tributários de n x 64 kbit/s), o conceito de uma rede interna de distribuição de relógio nas estações apresenta várias outras vantagens quanto ao desempenho, utilização dos recursos e facilidade de gestão e operação.
Na área de aproveitamento dos recursos, a vantagem do plano é permitir o compartilhamento do equipamento entre todos os serviços da estação, evitando a situação anterior em que vários serviços tinham suprimento próprio de sincronização.
Uma grande vantagem do plano tem a ver com a gestão e operação. O sincronismo passa a ser parte da infraestrutura da estação, tornando-se independente do serviço. Logo, a manutenção é muito menos complexa, e a ativação de novos serviços é imediata, não requerendo longos estudos e difíceis conexões a sinais de temporização. Ao invés de montar várias redes inter-estações para a distribuição de sincronismo, apenas uma rede atende a todos os serviços indiscriminadamente.
3.a) Implantação do Plano de Distribuição de Temporização Intra-Estação
Antigamente, embora o conceito de dispor de um só relógio-mestre por estação já fosse aceito, a realização desse conceito era puramente abstrata. Os estudos recentes de casos reais, entretanto, indicam que a melhor solução para implantar o plano é dispor de um gerador de sinal de temporização (TSG, Timing Signal Generator) autônomo, independente da central, em um bastidor de sincronização à parte. O TSG é temporizado a partir de dois sinais PCM primários, de 2048 kbit/s, seja sinais que chegam à estação e passam pelo TSG de forma transparente, seja sinais provenientes de elementos de rede (nós) da SDH que os recuperam a partir do sinal (óptico) de linha. Outra opção é recuperar a referência do serviço de tempo e freqüência do GPS. Uma das referências designa-se como principal, sendo que a outra serve como alternativa para o caso de falhar a primeira.
Todos os sinais que deixam a estação pertencem ao mesmo estrato que o TSG, pois praticamente não pode haver falhas na distribuição de relógio interna da estação, tal a segurança do plano.
Na implementação, o TSG está montado em um bastidor, podendo compor-se de forma a atender com folga os requisitos de qualquer estrato segundo as normas americanas ou do UIT-TSS. Após recuperar e limpar as referências, elas passam a controlar os osciladores-mestres (duplicados) de controle numérico, que podem, segundo o caso, ser de rubídio, de cristal em câmara térmica dupla ou de cristal com compensação de temperatura. Esses osciladores geram um sinal de temporização de 4 kHz em um barramento interno do bastidor. Por uma questão de segurança, esse barramento é quádruplo, podendo ser alimentado por um dos dois osciladores - mestres ou diretamente por uma das referências externas, segundo um esquema de prioridades. Podem-se instalar dois receptores GPS (ou LORAN-C, que nos países de idioma português, no entanto, não é recebido) e/ou uma referência primária de césio ao invés de ou adicionalmente às referências externas, o que pode ser útil no caso de um relógio de estrato 1 ou estrato 2. O barramento interno quádruplo de 4 kHz pode ser acedido pelos cartões de relógio, os quais há de vários tipos. Basicamente, cada um desses cartões gera sinais de temporização adequados aos equipamentos que irá temporizar, possuindo várias saídas. Cada equipamento sincronizado será conectado diretamente a uma dessas saídas, eliminando a temporização em cascata. A temporização em cascata é responsável por uma degradação do sinal de relógio e dificulta a gestão do sincronismo e a manutenção e remanejamento de equipamentos. Os cartões de distribuição do sinal de temporização são suportados por um comutador (automático ou manual) que transfere suas funções a cartões de backup em caso de falha daqueles. Todo o sistema é monitorado por um sistema de supervisão que, além de relatar falhas ao controlador, também mede a qualidade das referências e detecta erros na palavra de alinhamento de quadro de sinais PCM primários, levando os resultados dessas medições a um computador pessoal onde reside o programa de gestão do sistema e que prove interfaces para conexão ao sistema de gestão de redes de telecomunicações da empresa.
Fig 19: Relógios escravizados, G.812
3.b) Razões para Evitar uma Implantação apenas Conceitual do Plano
As empresas que já implementaram o plano apenas conceitualmente devem proceder a um estudo dos custos para a implementação real do plano face os benefícios obtidos. A maioria das empresas norte-americanas, e algumas européias e latino-norte-americanas, já adotaram o plano como seu objetivo estratégico.
3.c) TSGs Escravizados
No caso de o número de saídas de sincronismo necessárias exceder ao número máximo possível a partir de um só TSG, podem-se adotar vários TSG escravizados a um TSG principal. Neste caso, todos os demais TSG devem estar em fase, o que é possível escravizando-os um a um diretamente ao TSG principal a partir de um sinal especial que pode ser gerado em um dos tipos de cartões disponíveis, que além da informação de temporização leva também a informação de fase.
3.d) Diversificação nos Equipamentos e Segurança
Para evitar falhas, o responsável pela infraestrutura de sincronização nas estações deve tentar levar aos elementos de rede sinais de sincronização provenientes de cartões diferentes. No caso de sinalização # 7, os sinais de temporização deveriam sempre provir de cartões diferentes. No caso de haver vários sub-bastidores, preferivelmente os equipamentos deveriam receber temporização de dois cartões localizados em sub-bastidores distintos.
Como o plano prevê uma fonte única de sincronismo na estação, uma falha dessa fonte seria muito grave. Por isto, toda a atenção possível deve ser dedicada à redundância do hardware. Esse objetivo foi contemplado com total dedicação na realização da Telecom Solutions.
4. A Engenharia da Rede de Sincronização
Os encarregados de sincronismo têm a sua disposição quatro possibilidades para a escolha do relógio de cada estação. O estrato da estação é determinado pelo relógio do bastidor da unidade de suprimento de sincronismo intra-estação; pode ser um relógio primário, um relógio de estrato 2 ou de estrato 3, e, no caso de seguir as normas da Bellcore, de estrato 3E; no caso de seguir as recomendações atuais do UIT-TSS, o estrato 2 teria que atender ao TNC e o estrato 3 ao LNC da Rec. G.811, enquanto que o PRS ou PRC teria que atender à Rec. G.810.
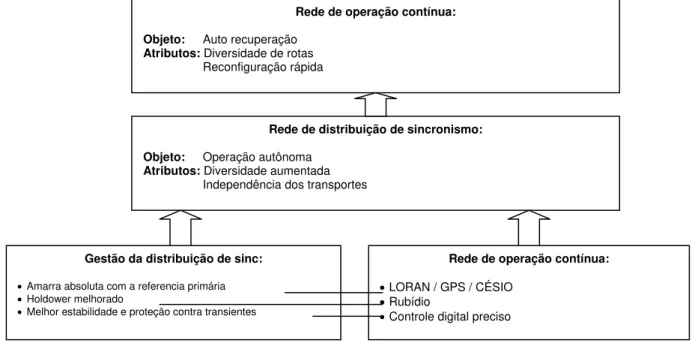
Fig 20: Gestão da distribuição de sincronismo
A decisão quanto ao estrato do relógio-mestre deve ser tomada com base em dois critérios:
• A necessidade que tem a estação de estabilidade em caso de holdover. Uma estação com grande volume de tráfego e que prove a referência de sincronização a muitas outras necessita um excelente comportamento em holdover para manter uma boa precisão de freqüência no caso de perder as referências.
• A posição da estação na rede hierárquica de sincronização.
Além desses dois critérios, é claro que o custo também deve ser levado em consideração.
Rede de operação contínua:
Objeto: Auto recuperação
Atributos: Diversidade de rotas Reconfiguração rápida
Rede de distribuição de sincronismo:
Objeto: Operação autônoma
Atributos: Diversidade aumentada Independência dos transportes
Gestão da distribuição de sinc:
• Amarra absoluta com a referencia primária
• Holdower melhorado
• Melhor estabilidade e proteção contra transientes
Rede de operação contínua:
• LORAN / GPS / CÉSIO
• Rubídio
Quanto maior a qualidade dos relógios, menor será a quantidade de deslizamentos esperada após o transcurso de certo tempo em condição de holdover. Para efeitos de comparação, geralmente calculam-se tabelas com a quantidade esperada de deslizamentos após um dia e após uma semana para as várias possibilidades de relógio-mestre, sempre imaginando um erro correspondente ao pior caso. Como quando um gerador de temporização entra em holdover praticamente sempre se dá início a atividades de manutenção, pode-se concluir que o uso de relógios de estrato 2 ou 3E garante uma operação praticamente livre de deslizamentos. Por isso recomenda-se seu uso na Unidade de Suprimento de Sincronismo (SSU ou BITS). Ainda no caso das estações que seguem a recomendação para o relógio de nó local (LNC) do UIT-TSS, os próprios fabricantes dos geradores de temporização (TSGs) fornecem unidades de estrato LNC que superam os requerimentos das recomendações com o objetivo de atender também às necessidades futuras, como é o caso dos TSG da Telecom Solutions. Um dos pontos críticos nos relógios é a estabilidade a curto prazo requerida pelos nós de redes SDH, que por si só já justifica uma maior preocupação na escolha dos relógios utilizados na planta. Os relógios atuais incorporam sistemas de filtragem digital do ruído de fase para gerar sinais de sincronismo que atendem a todas as necessidades observadas até hoje nas redes SONET e SDH.
Outra consideração importante no planejamento da rede inter-estações tem a ver com a degradação que um sinal de referência pode sofrer em passagens sucessivas por estações do mesmo estrato. Antes de haver muita experiência prática com as redes de sincronização, acreditava-se que o cascateamento dos sinais de relógio através de várias estações de mesmo estrato não degradava o sinal de maneira notável; no entanto, à medida que foi-se ganhando experiência, ficou comprovado que efetivamente o sinal sofre com esses passos sucessivos. O objetivo do planejador da rede deve ser evitar muitos passos em cascata; em nenhum caso deve haver mais que duas estações de estrato 3 em cascata. Se possível, deve-se ter não mais que uma estação de estrato 3 na cadeia inter-estações de distribuição de relógio.
Tradicionalmente, a rede de sincronização foi montada com base na rede hierárquica de comutação. A distribuição do sinal de sincronismo passava pelas centrais tandem e trânsito até chegar às centrais locais.
Com o advento das redes SDH, que tornam a rede entre as centrais mais flexíveis, a situação merece ser abordada com um enfoque distinto. As redes SDH, ao atender à interconexão de muitas centrais e outros equipamentos, passam a constituir um ponto muito conveniente para a distribuição do sinal de sincronismo.
Sendo assim, nos planos de distribuição de sincronismo deve-se considerar a possibilidade de utilizar os nós da rede SDH como fontes de relógio de referência para a rede subseqüente.
Neste caso, deve-se levar em conta que um nó que forneça relógio a vários equipamentos e estações que lhe seguem deve pertencer pelo menos ao estrato 2 (TNC no caso do UIT-TSS); deve-se estudar a possibilidade de torná-lo de estrato 1 (PRS).
Algumas empresas começam a adotar o critério de manter em qualquer anel ou barramento SDH duas estações de estrato 1; outras mantêm duas estações de estrato 2 (relógio de nó de trânsito, TNC, do UIT-TSS). Esta atitude traz consigo vários benefícios, inclusive servindo para limitar o número de passos na cadeia de sincronização, melhorando o desempenho total da rede ao encurtar as cadeias de temporizaçáo e facilitando a administração da rede de distribuição de sincronismo.
É claro que o uso de padrões primários de césio em vários pontos da rede pode chegar a ser muito caro, apesar de os relógios atômicos estarem tornando-se mais econômicos. Contudo, a possibilidade de utilizar, em vez de padrões de césio, receptores de GPS torna perfeitamente viável a estratégia. Os receptores de GPS associados a TSGs com osciladores de rubídio têm hoje um custo razoável, facilitando seu emprego em maior quantidade nas redes.
4.a)A Distribuição da Temporização por Sistemas PCM Primários
Normalmente, o sinal para a distribuição de sincronismo será o sinal PCM primário de 2048 kbit/s. Esse sinal pode ser um sinal com tráfego. Entretanto, várias administrações estão utilizando sinais sem tráfego. Esta estratégia tem dois motivos básicos:
Fig 21: Características para relógios SDH segundo a Rec. G.81s
Os sinais contendo tráfego podem sofrer re-roteamentos por contingências de tráfego. Uma falta de coordenação (aliás quase inevitável) entre a gerência do tráfego e a gerência da rede de sincronização pode ser desastrosa, causando a falta da referência de temporização por injunções de tráfego. Esta situação torna-se ainda mais grave com a introdução de redes onde os trajetos podem ser mudados dinamicamente (redes flexíveis). A utilização de sinais sem tráfego evita seu re-roteamento inadvertido.
Um tipo de trajeto que não deve ser utilizado para o transporte do sinal de referência é o circuito via satélite. Isto se deve às variações de retardo do trajeto, que tornam o sinal inadequado para fins de sincronização.
Outra consideração importante, já mencionada anteriormente, tem a ver com as redes SDH. Tanto a experiência prática quanto os estudos teóricos demonstram que um sinal PCM primário transportado pela SDH não deve ser utilizado como fonte de referência de sincronização. As características de estabilidade em curto prazo são inadequadas, devido ao mapeamento assíncrono; em VC flutuante, ademais, o sinal está sujeito asaltos de fase grandes causados pelos eventuais, mas inevitáveis movimentos de ponteiro.
Este problema está sendo solucionado com a adoção de relógios de estrato 1 ou 2 nos nós do anel ou barramento SDH, com os dois nós de estrato 1 e os demais nós da rede SDH recuperando sua temporização a partir do sinal óptico de linha e passando o sinal de temporização à velocidade primária ao bastidor de sincronismo que o distribui dentro da estação e à rede subseqüente. Os ADMs recuperam o relógio do sinal óptico STM-N de linha, entregando sinais ópticos STM-1 aos mux associados a eles. Por sua vez, os mux geram um sinal PCM primário de referência, derivado do sinal óptico STM-1 recebido do ADM, para sincronizar o bastidor de temporização da estação.
Este enfoque também tem alguns problemas. O sincronismo não deve ser simplesmente distribuído entre estações unidas por rotas contendo ADMs temporizados a partir do sinal de linha, pois em caso de ruptura do anel o ADM mais próximo à estação de destino escolheria seu outro lado como referência. Como o sinal óptico do outro lado pode estar sendo gerado pelo próprio dispositivo temporizado a partir do sinal recebido desse ADM, pode formar-se um laço de temporização fechado, com conseqüências desastrosas. Uma solução para este tipo de problema seria usar o cabeçalho do sinal STM-N para transportar mensagens sobre a rede de sincronismo, fazendo com que o ADM não possua referências alternativas, mas que entre em holdover ao faltar sua referência. A estação temporizada receberia uma mensagem pelo sinal PCM primário de referência. Este sinal PCM primário é o que está sendo gerado pelo mux a partir do sinal ótico de linha proveniente do ADM. Ao receber a mensagem de que o ADM entrou em holdover pelo cabeçalho do sinal de linha, o próprio mux geraria no sinal PCM primário de referência uma mensagem que causaria uma comutação no bastidor de sincronização a uma referência alternativa lá mesmo. Naturalmente, tal problemática leva a situações que só podem ser solucionadas a contento com uma engenharia adequada e com a utilização de relógios de boa qualidade nas estações. Preferivelmente, deve haver uma unidade de suprimento de sincronização (SSU ou BITS) em cada nó da rede, com TSGs dotados de osciladores de rubídio ou de cristal em câmara térmica dupla.
As redes ATM podem transportar sinais PCM primários através do método conhecido como emulação de circuitos. No momento, não se aconselha a utilização (para a distribuição de relógio) dos sinais PCM primários transportados por esses circuitos, devido ao jitter e ao Wander que podem adquirir.
De qualquer maneira, o que deve ser evitado a todo custo na realização das redes de sincronização é a criação acidental de laços fechados de temporização, onde um certo elemento de rede é temporizado a partir de uma referência proveniente de outro elemento de rede que esteja sendo temporizado por ele mesmo. Somente um planejamento muito cuidadoso de contingência poderá evitar essa situação, que pode existir sempre que haja transferência horizontal (ou seja, entre estações de mesmo estrato) do sinal de sincronismo. Esses laços criariam regiões isoladas da referência primária, além de ter instabilidades causadas pela realimentação.
Finalmente, deve-se evitar ao máximo cadeias longas no caminho do sinal de referência de sincronismo que chega a cada estação.