PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA - PPGEEL
ELISABETH CRISTINA LEMOS SPERB
ACIONAMENTO DO MOTOR SÍNCRONO DE IMÃS PERMANENTES USANDO DSP
ELISABETH CRISTINA LEMOS SPERB
ACIONAMENTO DO MOTOR SÍNCRONO DE IMÃS PERMANENTES USANDO DSP
Dissertação apresentada para a obtenção do título de mestre em Engenharia Elétrica da Universidade do Estado de Santa Catarina, Centro de Ciências Tecnológicas – CCT Orientador: Ademir Nied, Dr.
Co-orientador: José de Oliveira, Dr.
USANDO DSP”
por
ELISABETH CRISTINA LEMOS SPERB
Esta dissertação foi julgada para a obtenção do título de
MESTRE EM ENGENHARIA ELÉTRICA
Área de concentração em “Sistemas Eletroeletrônicos”, E aprovada em sua forma final pelo
CURSO DE MESTRADO ACADÊMICO EM ENGENHARIA ELÉTRICA CENTRO DE CIÊNICAS TECNOLÓGICA DA
UNIVERSIDADE DO ESTADO DE SANTA CATARINA.
Banca Examinadora:
Joinville, 5 de Agosto de 2011.
_______________________________________ Dr. Ademir Nied
CCT/UDESC (orientador/presidente)
_____________________________________ Dr. Seleme Isaac Seleme Junior
UFMG
_______________________________________ Dr. José de Oliveira
FICHA CATALOGRÁFICA
S749A
Sperb, Elisabeth Cristina Lemos.
Acionamento do Motor Síncrono de Imãs Permanentes Usando DSP/
Elisabeth Cristina Lemos Sperb;
Orientador: Ademir Nied
159 f.:il, 30 cm
Incluem referências.
Dissertação (mestrado) – Universidade do estado de Santa Catarina,
Centro de Ciências Tecnológicas, Mestrado em Engenharia Elétrica
Joinville, 2011.
1. Acionamento Elétrico 2. Controle Sensorless. Nied Ademir
AGRADECIMENTOS
Primeiramente agradeço a Deus, por estar sempre presente em minha vida.
Ao meu professor orientador Doutor Ademir Nied pela oportunidade de desenvolver pesquisa, pela amizade, pelos conhecimentos transmitidos, por sempre ter criado condições adequadas para que os trabalhos fossem realizados da melhor maneira possível e pelos dois ótimos anos de convivência.
Ao professor Doutor José de Oliveira, pelas sugestões e melhorias fornecidas para o desenvolvimento do trabalho.
Aos colegas do grupo do laboratório de pesquisa em acionamentos elétricos – LAPAE, pelo apoio e pelas contribuições dadas a este trabalho.
A todas as pessoas que participaram ou ajudaram direta ou indiretamente na execução deste trabalho.
Sperb, Elisabeth Cristina Lemos. Acionamento do Motor Síncrono de Ímãs Permanentes Usando DSP. 2011. 159f. Dissertação (Mestrado Acadêmico em Engenharia Elétrica – Área: Sistemas Eletroeletrônicos) – Universidade do Estado de Santa Catarina. Programa de Pós-Graduação em Engenharia Elétrica, Joinville, 2011.
Neste trabalho é apresentada a implementação de uma bancada experimental para o acionamento do motor síncrono de imãs permanentes (MSIP) utilizando um processador digital de sinais. O objetivo principal do trabalho é desenvolver uma bancada com características flexíveis que permita a implementação e avaliação de técnicas de controle variadas. Inicialmente, são estudadas as características construtivas do MSIP, como o material que compõe os imãs permanentes e as possibilidades de arranjo físico no rotor. Em seguida é desenvolvido o modelo matemático com as equações de corrente e tensão no referencial girante. É analisado na seqüência, o controle vetorial, utilizando o método direto pelo fluxo de rotor considerando a abordagem com controle de torque constante, e a técnica de modulação por largura de pulso por vetor espacial. São também apresentadas algumas técnicas de controle sem sensor de posição/velocidade (sensorless) baseadas no modelo matemático do motor e em redes neurais artificiais. Algumas técnicas de controle sensorless foram simuladas e analisadas. Para comprovar a flexibilidade da bancada desenvolvida, alguns algoritmos de estimação da posição e velocidade do motor, anteriormente simulados, foram implementados juntamente com o algoritmo de acionamento.
ABSTRACT
Sperb, Elisabeth Cristina Lemos. Synchronous Permanent Magnet Motor Drive System Control. 2011. 159f. Dissertation (Academic Master Course in Electric Engineering– Area: Electronics Systems) – University of Santa Catarina. Program in Electric Engineering, Joinville, 2011.
This project presents the implementation of an experimental test bed to drive the permanent magnet synchronous motor (PMSM) using a digital signal processor. The main purpose of the project is to develop a test bed with flexible features enabling the implementation and evaluation of different motor control techniques. Initially the constructive characteristics of the PMSM are studied, as the selection of the proper materials of permanent magnets and the possibilities of physical arrangement in the rotor. Then the mathematical model is developed with the currents and voltage equation in the rotating reference frame. An analysis is made, consequently, of the vector control using the method by considering the rotor flux approach with constant torque control and the space vector pulse width modulation technique. Some techniques of sensorless control based on the motor mathematical model and artificial neural network are also presented. To demonstrate the flexibility of the bed developed, some algorithms for estimating motor position and speed, earlier simulated, were implemented with the algorithm drive system.
Figura 1 Curva de desmagnetização dos matérias de imãs permanentes
(GIERAS and WING, 2002) 28
Figura 2 Colocação dos imãs no rotor do MSIP: a) Imãs de Superfície; b) Ímãs inseridos na Superfície; c) Ímãs no interior do rotor com orientação radial; d) Ímãs no Interior do rotor com orientação
circunferencial 29
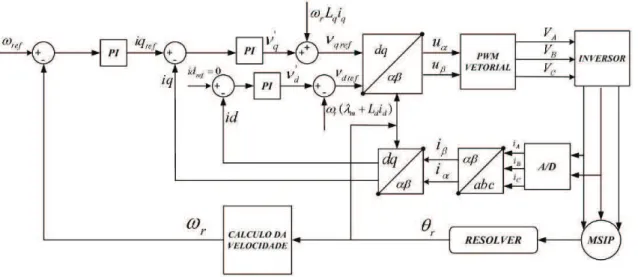
Figura 3 Diagrama de bloco do controle vetorial com angulo de torque
constante 40
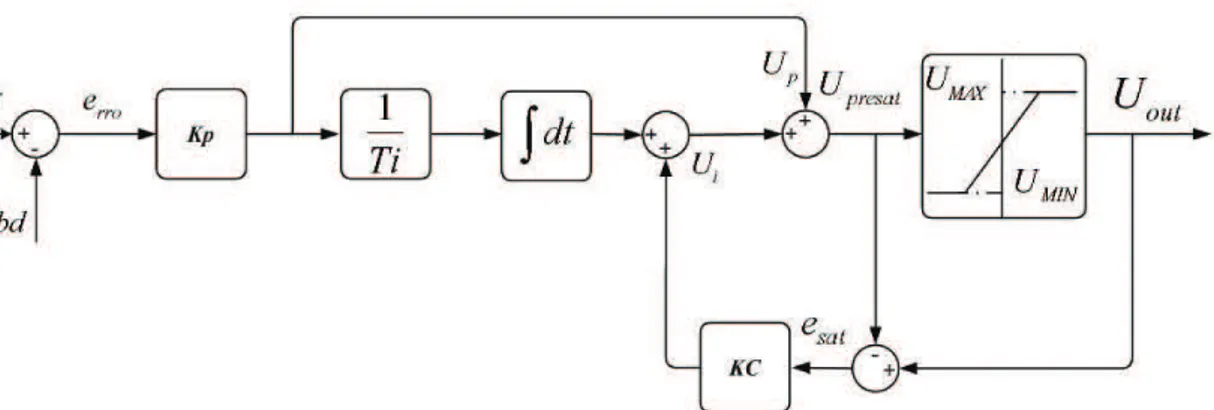
Figura 4 Diagrama de blocos do controlador PI com Anti-Windup (TEXAS
INSTRUMENTS, 2003) 42
Figura 5 Servoacionamento trifásico 43
Figura 6 Vetores Espaciais Básicos (TEXAS INSTRUMENTS, 2003) 45 Figura 7 Estrutura básica do resolver (TEXAS INSTRUMENTS, 2000) 49 Figura 8 Diagrama de blocos do controle sensorless do MSIP 52 Figura 9 Diagrama de blocos algoritmo do Filtro de EKF (PEROUTKA,
2005) 62
Figura 10 Diagrama de blocos do FPB com compensação de ganho e fase
(YU et al, 2006) 64
Figura 11 Integrador modificado com realimentação saturável (HU and WU,
1998) 65
Figura 12 Integrador com compensação por limitação (HU and WU, 1998). 66 Figura 13 Integrador com compensação adaptativa (HU and WU, 1998). 68 Figura 14 Diagrama vetorial com a relação entre o ɉ e a (HU and WU,
1998) 69
Figura 15 Diagrama do espaço vetorial do MSIP ( MORIMOTO et al, 2002) 71 Figura 16 Diagrama de blocos do observador de ordem mínima da fcem
(MORIMOTO et al, 2002) 72
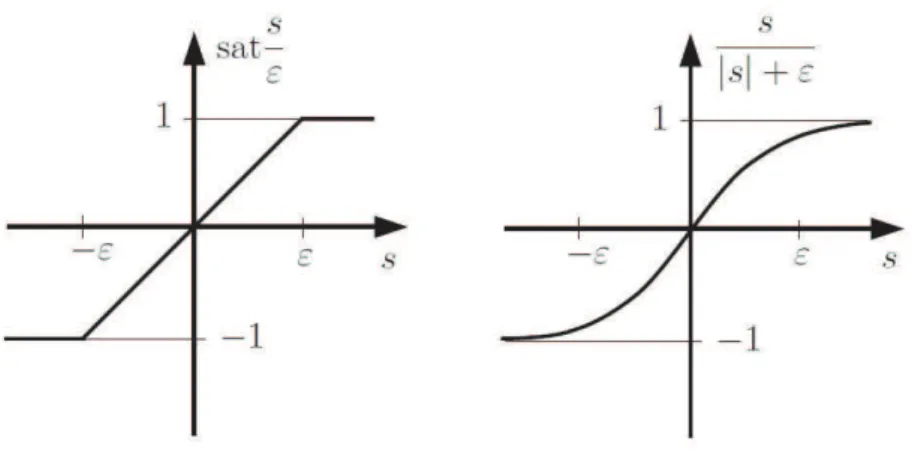
Figura 19 Aproximação linear e não linear da função escalar descontínua
(BRANDTSTADTER, 2009) 78
Figura 20 Controle com observador por modos deslizantes 86 Figura 21 Diagrama de blocos do estimador de posição/velocidade 87 Figura 22 Controle com o observador por modos deslizantes com PLL 87 Figura 23 Circuito PLL para correção do erro de posição (RAN and
GUANGZHAW, 2008) 88
Figura 24 Diagrama de blocos simplificado da estimação da velocidade pelo
Método MRAS (KANG et al, 2009) 95
Figura 25 Diagrama de blocos do sistema de controle baseado no estimador
MRAS 96
Figura 26 Estrutura MRAS utilizando o fluxo do estator, (DRURY et al,
2009) 97
Figura 27 Diagrama de blocos do estimador MRAS de fluxo com correção de
offset, (Andreescu, 1999) 98
Figura 28 Topologia de conexão em cascata completa 101
Figura 29 Controle sensorless utilizando a técnica do fluxo de estator: a), c),
e) para 0,3 pu de velocidade; b), d), f) para 0,6 pu de velocidade 107 Figura 30 Fluxo do estator no referencial ሺߙ െ ߚሻ: a), c), e) para 0,3 pu de
velocidade; b), d), f) para 0,6 pu de velocidade 107 Figura 31 Controle sensorless utilizando a técnica da fcem estendida: a), c),
e) para 0,3 pu de velocidade; b), d), f) para 0,6 pu de velocidade 109 Figura 32 Controle sensorless utilizando a técnica Sliding Mode: a), c), e)
para 0,3 pu de velocidade; b), d), f) para 0,6 pu de velocidade 112 Figura 33 Controle sensorless utilizando a técnica Sliding Mode com PLL: a),
c), e) para 0,3 pu de velocidade; b), d), f) para 0,6 pu de velocidade 113 Figura 34 Controle sensorless utilizando a técnica MRAS com erro de
corrente: a), c), e) para 0,3 pu de velocidade; b), d), f) para 0,6 pu
de velocidade 117
Figura 35 Controle sensorless utilizando a técnica MRAS com erro de fluxo: a), c), e) para 0,3 pu de velocidade; b), d), f) para 0,6 pu de
velocidade 119
INSTRUMENTS, 1997) 123 Figura 38 Placa de Controle UPCC2812 (HIGH POWER ENGENNERING,
2005) 125
Figura 39 Placa de controle UPCC2812 e módulos adicionais (HIGH
POWER ENGENNERING, 2005) 126
Figura 40 PWM invertidos (a , b) e senoide de referência (c) para alimentação
do Resolver 128
Figura 41 Saídas do resolver: a)െሺɅ), b) ሺɅ), c) െ ሺɅ), d)
ሺɅ) 129
Figura 42 Saída diferencial seno (a) e cosseno (b) 129
Figura 43 Leitura da Corrente na Fase ܽ : a) sinal medido; b) sinal da placa de
controle 130
Figura 44 Correntes medida e de referência id (a)e iq (b) 131 Figura 45 Sinais medidos: a)Tensão de barramento; b) Tensões de fase; c)
função da modulação 131
Figura 46 Medidas de velocidade, posição e corrente da fase a: a), c) para 0,2
e 0,3 pu de velocidade; b), d) para 0,3 e 0,4 pu de velocidade 132 Figura 47 Velocidade e posição estimadas e erro de velocidade com a técnica
sliding mode: a), c), e) para 0,3 pu de velocidade; b), d), f) para 0,6
pu de velocidade 133
Figura 48 Velocidade e posição estimadas e erro de velocidade com a técnica sliding mode com PLL: a), c), e) para 0,3 pu de velocidade; b), d),
f) para 0,6 pu de velocidade 134
Figura 49 Velocidade e posição estimadas e erro de velocidade com a técnica de fluxo de estator: a), c), e) para 0,3 pu de velocidade; b), d), f)
para 0,6 pu de velocidade 135
Figura 50 Fluxo do estator (Ƚ െ Ⱦ) estimado: a), c) para 0,3 pu de velocidade;
b), d) para 0,6 pu de velocidade 136
Figura 51 Transformada trifásica ሺܽǡ ܾǡ ܿሻ para o referencial ߙ െ ߚ
estacionário 152
Figura 52 Referencial estacionário ሺߙ െ ߚሻe (݀ െ ݍሻgirante 154
Figura 54 Velocidade e posição estimada usando o circuito PLL (ESKOLA,
2006) 156
Figura 55 Diagrama de blocos simplificado do circuito PLL com controlador
Tabela 1 Comutação das Chaves e Tensões Instantâneas Resultantes do
Inversor Trifásico. 44
Tabela 2 Vetores Espaciais Correspondentes e suas componentes ሺȽ െ Ⱦሻ 45
Tabela 3 Parâmetros do Motor 104
Tabela 4 Erro médio de velocidade (rad/s) 120
LISTA DE ABREVIATURAS
Corrente Alternada
Motor Brushless DC
Direct Current (Corrente Contínua)
Digital Signal Processing (Processador Digital de Sinais)
Extended Luenberger Observe (Observador de Luenberger estendido)
Extended Kalman Filter (Filtro de Kalman Estendido) Força contra-eletromotriz
Força Magneto Motriz
Field Oriented Control (Controle Orientado por Campo) Motor Síncrono de Imãs Permanentes
Proporcional Integral
Pulso Width Modulation (Modulador por largura de Pulso) Phase Locked Loop (Elo Travado por Fase)
Redes Neurais Artificiais
Surface Isent Permanent Magnet (Imãs Permanentes Inseridos na Superfície)
Surface Permanent Magnet (Ímãs Permanentes na Superfície) Surface Permanent Magnet Síncronos Motor (Motor Síncrono de
ímãs Permanentes na Superfície)
ܤ Coeficiente de Atrito Viscoso ሺሻ
ܤௗ Densidade de fluxo ሺሻ
୫୶ Densidade de fluxo no ponto de operação de máxima densidade de energia ሺሻ
ܤ Densidade de fluxo remanescente ሺሻ
݂௦ Frequência nominal de operação do motor ሺሻ
ܪ Intensidade de campo magnético ሺȀሻ
ܪ Força coercitiva ሺȀሻ
݅ Corrente que circula nas bobinas do estator na fase a ሺ) ݅ Corrente que circula nas bobinas do estator na fase b ሺሻ ݅ Corrente que circula nas bobinas do estator na fase c ሺሻ
݅ Vetor de corrente do estator trifásica ሺሻ
ܫ௦ Corrente base ሺ ሻ
ܫ Corrente nominal ሺሻ
݅ௗ Corrente de estator no eixo d do referencial bifásico girante ሺሻ ݅ௗ Corrente de estator no eixo d do referencial bifásico girante normalizada ሺሻ ݅ௗ Vetor de Corrente do estator no referencial bifásico girante ሺሻ ݅ Corrente de estator no eixo q do referencial bifásico girante ሺሻ ݅ Corrente de estator no eixo q do referencial bifásico girante normalizada ሺሻ ݅ఈ Corrente de estator no eixo Į do referencial bifásico estacionário ሺሻ ݅ఉ Corrente de estator no eixo ȕ do referencial bifásico estacionário ሺሻ ݅ఈఉ Vetor de Corrente do estator no referencial bifásico estacionário ሺሻ
ܬ Momento de inércia ሺଶሻ
݇ Passo de amostragem
୧ Ganho do controlador integral ݇ Ganho do controlador proporcional
݇௦ Ganho de transformação de tensão do resolver
ܮ Indutância simplificada no eixo de referencia girante ሺሻ
ܮ Indutância própria do enrolamento do estator na fase a ሺሻ ܮ Indutância mútua entre os enrolamentos dos estator da fase a e b ሺሻ ܮ Indutância mútua entre os enrolamentos dos estator da fase a e c ሺሻ ܮ Indutância mútua entre os enrolamentos dos estator da fase b e a ሺሻ ܮ Indutância própria do enrolamento do estator na fase b ሺሻ ܮ Indutância mútua entre os enrolamentos dos estator da fase b e c ሺሻ ܮ Indutância mútua entre os enrolamentos dos estator da fase c e a ሺሻ ܮ Indutância mútua entre os enrolamentos dos estator da fase c e b ሺሻ ܮ Indutância própria do enrolamento do estator na fase c ሺሻ
ܮௗ Indutância de eixo direto ሺሻ ܮௗௗ Indutância própria do enrolamento do estator no referencial girante ሺሻ
ܮௗ Indutância de eixo direto normalizada ሺሻ
ܮௗ Indutância mútua entre os enrolamentos d-q ሺሻ
ܮ Indutância de eixo em quadratura ሺሻ
ܮௗ Indutância mútua entre os enrolamentos q-d ሺሻ
ܮ Indutância de eixo em quadratura normalizada ሺሻ
ܮ Indutância própria do enrolamento do estator referencial girante ሺሻ P Número de pólos
p Operador diferencial
ܲ௦ Potência base ሺሻ
ܴ Representação da Resistência nas fases a,b,c ()
ܴ௦ Resistência do estator ()
ܴ௦ Resistência do estator normalizada ሺሻ
Tempo contínuo ሺሻ
ݏ Plano s
ܶ Matriz transposta ܶ௦ Torque base
ܶ Torque eletromagnético ሺሻ
ܶ Torque de carga ሺሻ
ܶ՜ఈఉ Matriz transformada de Clark ሺሻ
ܶఈఉ՜ௗMatriz transformada de Park ሺሻ
ܶ௦ Resistência do estator ()
ܷ௫௧ Tensão de alimentação do resolver ሺሻ
ܷ Amplitude da tensão de alimentação do resolver ሺ ሻ
ܷଵ Tensão de saída do resolver ሺሻ ሺሻ
ܷଶ Tensão de saída do resolver ሺ ሻ ሺሻ
ߥ Tensão aplicada no enrolamento do estator na fase a ሺሻ ߥ Tensão aplicada no enrolamento do estator na fase b ሺሻ
ܸ௦ Tensão base ሺ ሻ
ߥ Tensão aplicada no enrolamento do estator na fase c ሺሻ
ߥ Vetor de tensão do estator trifásica ሺሻ
ݒௗ Tensão de estator no eixo d do referencial bifásico girante ሺሻ ߥௗ Tensão de estator no eixo d do referencial bifásico girante normalizada ሺሻ
ܸௗ Tensão de barramento ሺ ሻ
߰ Fluxo do estator na fase a ሺ െ ሻ
߰ Fluxo de fluxo do estator fase b ሺ െ ሻ
߰ Fluxo de fluxo do estator fase c ሺ െ ሻ
߰ Vetor de fluxo do estator trifásico ሺ െ ሻ
ߣ Constante de fluxo devido ao imã do rotor ሺȀȀሻ
ߠ Ângulo do rotor ሺሻ
ߠ Ângulo mecânico do rotor ሺÙሻ
߱ Velocidade angular da freqüência de Corte ሺȀሻ
߱௦ Velocidade base do rotor
߱ Velocidade na freqüência de referencia do resolver ሺȀሻ
߱ Velocidade mecânica do rotor ሺሻ
߱ Velocidade elétrica do rotor ሺȀሻ
߱ Velocidade elétrica do rotor normalizada ሺሻ
Outras Notações
ݔො Valor estimado de x
ݔԦ Vetor x
ݔሶ Derivada de x ݔҧ Erro de x
SUMÁRIO
1.INTRODUÇÃO ... 19
2.CARACTERÍSTICAS CONSTRUTIVAS, MODELAMENTO E CONTROLE DO MSIP ... 26
2.1.MÁQUINA SÍNCRONA DE IMÃS PERMANENTES ... 26
2.2.MATERIAIS PARA CONFECÇÃO DOS IMÃS PERMANENTES ... 27
2.3.CONFIGURAÇÕES DA MÁQUINA SÍNCRONA DE IMÃS PERMANENTES ... 29
2.4.DETERMINAÇÃO DOS PARÂMETROS DO MSIP... 30
2.5.MODELO MATEMÁTICO DO MSIP ... 31
2.5.1.Modelo da Dinâmica Elétrica ... 31
2.5.2.Modelo da Dinâmica Mecânica ... 36
2.5.3.Modelo Matemático por Unidade (PU)... 37
2.6.CONTROLE VETORIAL DO MSIP ... 39
2.6.1.Implementação dos Controladores PI no Tempo Discreto e Projeto dos Ganhos ... 41
2.7.MODULAÇÃO UTILIZANDO ESPAÇO VETORIAL POR LARGURA DE PULSO (SVPWM) ... 43
2.8.LEITURA DA POSIÇÃO DO ROTOR ... 48
2.9.CONCLUSÃO ... 50
3.ESTIMAÇÃO DE POSIÇÃO E VELOCIDADE ... 52
3.1.INTRODUÇÃO AOS ESTIMADORES DE POSIÇÃO E VELOCIDADE DO MSIP ... 52
3.1.1.Metodologia de Escolha dos Estimadores ... 54
3.2.SENSORIAMENTO DA POSIÇÃO UTILIZANDO OBSERVADORES DE ESTADOS ... 55
3.2.1.Sensoriamento de Posição Utilizando Observador de Estados com Padrões Estocásticos (Filtro de Kalman) ... 58
3.2.2.Aplicação do EKF no MSIP ... 58
3.3.SENSORIAMENTO DA POSIÇÃO UTILIZANDO O FLUXO DE ESTATOR ... 62
3.3.1.Integração do Fluxo por Filtro Passa-Baixa ... 63
3.3.2.Integração do Fluxo Utilizando um Integrador com Realimentação Saturável ... 64
3.3.3.Integração do fluxo Utilizando Compensação por Limitação ... 66
3.3.4.Integração do Fluxo Utilizando um Algoritmo de Compensação Adaptativa ... 67
3.4.SENSORIAMENTO DA POSIÇÃO UTILIZANDO A FCEM ... 70
DESLIZANTES... 74
3.5.1.Princípios Teóricos Para Aplicação do Observador por Modos Deslizantes ... 74
3.5.2.Método do Controle Equivalente ... 75
3.5.3.Chattering e Discretização... 76
3.5.4.Solução da Camada Limite ... 77
3.5.5.Análise de Estabilidade ... 78
3.5.6.Modelo Matemático do Observador por Modos Deslizantes Aplicado ao MSIP ... 79
3.5.7.Observador de Velocidade por Modos Deslizantes Aplicado ao MSIP sem Saliência ... 82
3.5.8.Estimação da Posição/Velocidade do Rotor Baseada no PLL... 87
3.6.SENSORIAMENTO DA POSIÇÃO POR SISTEMA ADAPTATIVO POR MODELO DE REFERÊNCIA (MRAS) ... 88
3.6.1.Princípios Teóricos Para Aplicação do Observador MRAS ... 89
3.6.2.Modelo Matemático do Observador MRAS Aplicado ao MSIP ... 90
3.7.SENSORIAMENTO DE POSIÇÃO USANDO REDES NEURAIS ARTIFICIAIS ... 99
3.7.1.Introdução a Técnica de Redes Neurais Artificiais ... 99
3.7.2.Redes Neurais Artificiais Aplicadas ao MSIP ... 100
3.8.CONCLUSÃO ... 102
4.RESULTADOS DE SIMULAÇÃO ... 104
4.1.ESTIMADOR UTILIZANDO O FLUXO DE ESTATOR. ... 105
4.2.ESTIMADOR UTILIZANDO A TÉCNICA DA FCEM ESTENDIDA ... 108
4.3.ESTIMADOR UTILIZANDO A TÉCNICA DE SLIDING MODE ... 109
4.4.ESTIMADOR UTILIZANDO A TÉCNICA MRAS ... 113
4.5.CONCLUSÃO ... 119
5.DESCRIÇÃO DA PLATAFORMA E RESULTADOS EXPERIMENTAIS ... 121
5.1.PLATAFORMA EXPERIMENTAL ... 121
5.2.PROCESSADOR DIGITAL DE SINAIS ... 122
5.3.DESCRIÇÃO DO HARDWARE DE POTÊNCIA ... 124
5.4.DESCRIÇÃO DO HARDWARE DE CONTROLE ... 125
5.5.LEITURAS ANALÓGICAS ... 127
5.6.DESCRIÇÃO DO HARDWARE DO RESOLVER ... 127
5.7.RESULTADOS DO ACIONAMENTO DO MOTOR E DOS ALGORITMOS SENSORLESS ... 129
5.8.CONCLUSÃO ... 136
REFERÊNCIAS BIBLIOGRÁFICAS ... 139
ANEXO A ... 152
ANEXO B ... 155
1. INTRODUÇÃO
Nos anos de 1950-70 havia um grande uso de diversos tipos de motores sem a preocupação em relação a critérios de desempenho e eficiência. Entretanto nos últimos anos, o crescente aumento no consumo de energia se tornou uma das grandes preocupações mundiais. Novos conceitos sobre o uso racional de energia e as crescentes necessidades relacionadas à conservação do meio ambiente criaram uma demanda significativa por dispositivos de acionamento de motores mais eficientes e com menos consumo de energia elétrica. A transição de dispositivos de acionamento de velocidade única para velocidades variáveis incentivou a pesquisa e o desenvolvimento de estratégias de controle de alto desempenho em uma ampla faixa de acionamento de motores. Desta maneira muitas pesquisas têm sido realizadas em acionamentos de motores com velocidades variáveis devido a um significativo interesse industrial e comercial em tais sistemas.
O desenvolvimento dos dispositivos de potência semicondutores possibilitou o desenvolvimento de conversores de freqüência para motores CA, permitindo uma fonte de corrente trifásica senoidal com controle contínuo da freqüência (BOSE, 2002).
Atualmente nas indústrias, a escolha mais comum de conversores de freqüência é para alimentar o motor de indução, sendo este o motor dominante em muitas aplicações até o momento. Mas, este motor esta sendo substituído pelo motor Síncrono de Imãs Permanentes (MSIP) e pelo motor Brushless DC (BLDC) em aplicações de baixa potência ou inferiores a 10KW, tais como: eletrodomésticos, ferramentas elétricas, pequenas bombas e ventiladores. Estes motores possuem muitos recursos atrativos quando comparado ao motor de indução. O enrolamento do rotor é substituído pelos imãs permanentes, simplificando a estrutura do motor. As perdas no cobre são reduzidas, pois não existem circuitos de corrente no rotor. Proporcionam maior eficiência, maior fator de potência e maior densidade de potência resultando em um menor tamanho do motor e uma melhor transferência de calor (MONAJEMY, 2000).
O uso de imãs compostos por materiais de terras raras proporciona alta densidade de fluxo e facilitam a construção do motor, com uma alta densidade de potência. Os imãs permanentes podem ser manufaturados de diversas formas, o que proporciona grande flexibilidade de construção do motor. (KRISHNAN, 2010).
MSIP é senoidal, a fcem no BLDC é trapezoidal. O controle do acionamento trapezoidal é mais simples, quando comparado ao acionamento senoidal, pois não há necessidade de um sensor de posição de alta resolução no rotor, uma vez que somente seis instantes de comutação da corrente das três fases devem ser monitorados a cada ciclo elétrico, quando no caso, o motor for acionado por um inversor de tensão, onde existem três braços com um par de chaves em cada braço. Além disso, para o controle, é necessário somente um sensor de corrente no barramento DC. O acionamento senoidal é mais complexo, pois são necessários pelo menos dois sensores de corrente e um sensor de posição de alta resolução para manter a sincronização precisa da forma de onda da corrente com a posição angular do rotor em cada instante de tempo. O BLDC é normalmente utilizado em aplicações de menor desempenho, tais como bombas e ventiladores. O MSIP é usado principalmente em aplicações de alto desempenho que exigem torque de alta precisão. O grande inconveniente das máquinas síncronas de imãs permanentes é o alto custo devido aos materiais que compõe os imãs permanentes. (KRISHNAN, 2010).
A relação torque/corrente do motor síncrono é não linear, o torque do motor síncrono depende tanto da magnitude quanto do ângulo do vetor de corrente com relação ao rotor. O estudo de Blondel (1913), sobre os motores síncronos juntamente com a transformada de Park, (PARK, 1929) abriram caminho para o controle linear e instantâneo sobre o torque do MSIP (MONAJEMY, 2000).
Através da teoria de Park, as componentes trifásicas de tensão e corrente do MSIP podem ser decompostas em correntes bifásicas girantes. Essencialmente a transformada de Park, faz uso de variáveis auxiliares de modo a reduzir as equações da máquina permitindo representá-la como um sistema bifásico. O uso dessa transformação deu origem a uma abordagem de controle conhecida como controle de vetores ou controle vetorial. (LEONHARD, 1997).
O controle vetorial possibilita o controle independente sobre a magnitude e o ângulo da corrente em relação ao rotor de tal forma que o controle instantâneo sobre o torque seja possível. A aplicação da técnica de controle vetorial ao MSIP permite o controle de torque linear, bem como o controle sobre diferentes critérios de desempenho como eficiência e fator de potência (KRISHNAN, 2010).
ortogonais ሺ݀ െ ݍሻ com o eixo do fluxo do motor. Para isso é necessário a determinação espacial do fluxo do rotor. (LEONHARD, 1997). Para o MSIP, o fluxo do rotor está alinhado com a rotação do motor, pois nesse motor, não há escorregamento. Logo, ao se determinar a posição do rotor por medição ou através de algoritmos de estimação, a posição do fluxo também fica determinada. (JAHNS et al, 2009.) A variável mecânica de posição do rotor MSIP pode ser medida através de um sensor mecânico montado em seu eixo denominado encoder ou resolver.
Entretanto, a existência de um sensor de eixo apresenta várias desvantagens como aumento no custo do produto final, tamanho da máquina, confiabilidade e sensibilidade a ruído. Normalmente esses sensores podem custar tanto quando um motor de baixa potência, tornando o custo do sistema total inviável economicamente comparado com outros motores comerciais.
Com o intuído de viabilizar economicamente o uso do MSIP em larga escala, tem-se verificado nos últimos 15 anos um crescente interesse no desenvolvimento de algoritmos e técnicas de estimação de posição/velocidade para o controle deste motor sem sensor de posição/velocidade (ACARNLEY and WATSON, 2006).
Outras vantagens da utilização de técnicas do controle vetorial sem sensor de posição/velocidade estão relacionadas à eliminação do cabo transdutor e redução de ruídos elétricos. O sistema de monitoramento da posição/velocidade pode ser implementado juntamente com outros sistemas eletrônicos de controle, logo, não é necessário acrescentá-lo junto ao motor. Desta maneira, evita-se que a taxa de variação de temperatura do motor seja ainda mais limitada, possibilitando a sua aplicação em sistemas com restrição de custos.
Se a posição/velocidade do rotor é detectada através de algoritmos de estimação sem a utilização do sensor, o controle do sistema do motor é chamado de sensorless (sem sensor). Embora somente as variáveis de posição e velocidade sejam estimadas, a corrente de fase do MSIP necessita ser medida, para que seja possível aplicar a técnica de controle vetorial e desenvolver algoritmos capazes de estimar a posição e a velocidade. Entretanto o termo controle sensorless é um termo bastante usado na literatura e também é utilizado neste trabalho.
Os estimadores de velocidade são projetados com base no entendimento comum de que a informação acerca da velocidade atual está contida nos sinais elétricos de fácil acesso. Assim, as soluções encontradas na literatura podem ser divididas em dois grupos principais:
estendido de Luenberger (KUBOTA and MATSUSE, 1994), observadores em modos deslizantes (DERDIYOK, 2003), filtro de Kalman estendido (EKF) (VAS, 1998), sistemas com adaptação por modelo de referência (VAS, 1998), detecção indireta de fluxo por meio da medida em tempo real da reatância do motor (INFORM) (VAS, 1999), injeção de sinal de alta freqüência (LORENZ, 1999), injeção de sinal de baixa freqüência (LEPPÄNEN, 2003), cálculo do escorregamento (VAS, 1998), pseudoinversão (BELICSYNSKI and GRZESIAK, 2002), e as variações pertinentes a cada método citado. Infelizmente, qualquer modelo matemático introduz algum tipo de simplificação, que por sua vez contribui para a deteriorização da estimação.
No segundo grupo estão os métodos que não usam qualquer modelo matemático da planta em questão. Este grupo consiste de estimadores baseados em Redes Neurais Artificiais (RNA), por exemplo. Em tais casos, somente as entradas e as saídas são conhecidas, enquanto as relações não-lineares entre elas não são conhecidas. As RNA possuem algumas características que podem ser usadas vantajosamente em se tratando do controle sensorless do MSIP. Entre elas pode-se citar: a capacidade de auto-aprendizado, que é conseguida através de modificações progressivas no nível sináptico dos neurônios interconectados sem a necessidade da supervisão de todas as medidas e compensação de dados por um especialista; e, a excelente capacidade das RNA para ajustar as várias dependências multidimensionais, as quais são dificilmente ajustadas em tempo real usando métodos matemáticos clássicos. Soluções usando RNA podem incorporar treinamentos da rede em tempo real, onde seus parâmetros são constantemente ajustados (KIM et al., 2001), (SOBCZUK, 1999), (BEN-BRAHIM et al., 1999), (PARMA, 2000), (NIED, 2007) ou então, o treinamento em que a rede se submete a uma série de ensaios para a definição de seus parâmetros para após, com estes parâmetros ajustados, efetuar o mapeamento entrada-saída (ORLOWSKA-KOWALSKA and MIGAS, 2001), (CICHOCKI and AMAURI, 2002). Estes estimadores naturalmente possuem robustez a ruídos e distúrbios paramétricos.
Uma grande dificuldade encontrada para desenvolver a pesquisa em técnicas de acionamento do MSIP sem sensor de velocidade/posição é a necessidade de uma bancada de testes com funções específicas que permitam a implementação dos algoritmos sensorless.
Com o intuito de possibilitar tanto o controle sensorless do MSIP como a pesquisa e desenvolvimento de diferentes técnicas de controle aplicadas ao MSIP, a bancada deve ser composta por requisitos, que criem características de uma bancada flexível para implementações de técnicas de controle variadas. Estes requisitos são listados abaixo:
•Utilização de uma Placa de controle para uso geral (Universal Power Converter Control (UPCC2812), High Power Engineering (HPE)) com base em um processador digital de sinais (DSP) comercial e versátil ((TMS320F2812) Texas Instruments), permitindo uma pronta utilização da maioria dos recursos deste DSP e também desenvolver, depurar, analisar o acionamento e o controle de motores devido ao condicionamento de sinais e periféricos a bordo desta placa.
•Utilização de um modelo do software aberto em linguagem C, possibilitando alterações variadas, através da utilização de um software de interação com o usuário, (Code Composer Studio - Texas Instruments), onde é possível realizar a edição do programa, compilação, verificações de erros e manipulações e leitura das variáveis em tempo real.
•Utilização de uma placa de potência para o acionamento do MSIP desenvolvida pelo fabricante do mesmo (WEG, Indústrias S.A Automação) reduzindo assim o tempo de desenvolvimento, o custo e aumentando a confiabilidade. A observância desse requisito possibilita que o foco do trabalho seja no controle do motor e abrangendo a aplicação a outros MSIP compatíveis a este dispositivo de potência.
•Total acesso aos sinais do sensor de posição, corrente, e tensão do barramento DC de modo a possibilitar, a substituição, manipulação e adaptação de qualquer um desses dispositivos de medida.
A partir das considerações anteriores este trabalho tem como objetivo o desenvolvimento de uma bancada para o acionamento do MSIP, visando a implementação dos métodos de estimação da posição/velocidade estudados bem como possibilitar futuras pesquisas e desenvolvimento na área de acionamento e controle de motores síncronos de imãs permanentes de diferentes formas construtivas.
Da mesma maneira que o controle orientado pelo campo, o inversor também é analisado através de um fasor espacial gerador de tensão e corrente, através da utilização da modulação por largura de pulso por vetor espacial (Space Vector Modulation).
Devido à alimentação trifásica do MSIP, a bancada utiliza dois sensores de corrente e um sensor de tensão do barramento DC, possibilitando assim, abranger a aplicação e manipulação de várias técnicas de controle sensorless. A posição do rotor é obtida através de um sensor de posição do tipo resolver.
Para comprovar a flexibilidade da bancada desenvolvida, alguns algoritmos de estimação da posição e velocidade do MSIP foram implementados juntamente com o algoritmo de acionamento.
A escolha das técnicas de estimadores estudadas foi baseada nos seguintes critérios:
•Nenhuma modificação de hardware em relação ao controle vetorial com o sensor de posição é realizada para implementação do algoritmo, ou seja, técnicas de injeção de sinal não fazem parte deste estudo.
•Nenhuma modificação no software do inversor para a modulação PWM é realizada, facilitando assim a implementação do algoritmo.
•A técnica obrigatoriamente tem que estar baseado no modelo matemático do MSIP, ou então utilizar recursos de inteligência computacional, como por exemplo, as RNA.
O MSIP utilizado neste trabalho apresenta imãs permanentes de alta densidade de energia, do tipo NdFeB. Estes materiais são colocados na superfície do rotor sendo também chamados de Surface Permanent Magnet (SPM), ou imãs permanentes na superfície.
Durante o desenvolvimento deste trabalho foram publicados os seguintes artigos: “Sensorless Control of PMSM Using a New Efficient Neural Network Speed Estimator”, e “Resolver to Digital Conversion – A Filter Approach to PMSM position Measurement”, no congresso IEEE III International Conference on Power Electronics, Energy and Electrical Drives, Malaga, Spain, May 2011.
Este trabalho é desenvolvido em seis capítulos e três anexos, dispostos conforme a seguinte seqüência:
Capítulo 2 – Apresenta os aspectos construtivos do MSIP, assim como a modelagem do motor e a teoria básica do controle vetorial aplicada ao acionamento do MSIP, considerando a estratégia de controle de ângulo de torque constante.
Capítulo 4 – É apresentado o projeto dos observadores utilizando as seguintes técnicas: Fluxo do estator (YOUSFI ET ALL 2009), fcem extendida (MORIMOTO ET AL, 2002), Sliding Mode (CHI, 2009) e MRAS (KANG, ET ALL, 2009) (ANDREESCU, 1999). Uma validação preliminar dessas técnicas é realizada através de simulações computacionais.
Capítulo 5 – Neste capítulo são descritas as características dos equipamentos e dispositivos que compõem a bancada de acionamento. São apresentados resultados experimentais do funcionamento e validação da bancada desenvolvida. Alguns dos algoritmos de estimação da posição e velocidade do rotor, estudados no capítulo 4, são implementados juntamente com o algoritmo de acionamento do motor.
Capítulo 6 – Este capítulo é destinado às conclusões e propostas para desenvolvimentos de trabalhos futuros.
2. CARACTERÍSTICAS CONSTRUTIVAS, MODELAMENTO E CONTROLE DO MSIP
Neste capítulo são apresentadas primeiramente algumas características básicas do MSIP. Em seguida, o modelo matemático será analisado e serão explicados os conceitos básicos relacionados às componentes de um sistema de controle vetorial do MSIP.
2.1. MÁQUINA SÍNCRONA DE IMÃS PERMANENTES
Nas máquinas síncronas de imãs permanentes o rotor é constituído por imãs permanentes que fornecem um fluxo rotórico constante. As principais vantagens desta estrutura são: a eliminação de perdas no cobre devido à inexistência de enrolamento no rotor, alta densidade de potência, baixa inércia no rotor e uma construção mais robusta do rotor. Entretanto, algumas desvantagens também podem ser relacionadas como perda da flexibilidade do controle do fluxo e possíveis efeitos de desmagnetização dos imãs. (BOSE, 2002)
As máquinas síncronas de imãs permanentes podem ser divididas em máquinas DC (Brushless DC (BLDC)) e máquinas com alimentação senoidal (Permanent Magnet Synchronous Motor PMSM ou MSIP). O tipo de alimentação depende da forma da fcem
característica de cada maquina que por sua vez depende de aspectos construtivos e do tipo de imantação dos ímãs do motor. O MSIP e o BLDC possuem muitas similaridades, como exemplo, ambos têm os imãs permanentes localizados no rotor e requerem uma corrente de estator alternada para produzir torque constante.
O BLDC é definido em termos da descrição do motor e de suas características de funcionamento e controle. Para o BLDC pode-se destacar as seguintes características principais (PILLAY and KRISHNAN, 1988):
•A distribuição do fluxo magnético no entreferro é trapezoidal;
•A forma de onda das correntes trifásicas de estator é retangular separadas entre si de 120º e somente duas fases conduzem em cada instante de tempo;
•Os enrolamentos do estator são concentrados.
As principais características do MSIP com alimentação senoidal são:
•Distribuição senoidal do fluxo magnético no entreferro; •Correntes senoidais;
Um estudo mais detalhado é feito por Pillay and Krishnan, (1991), onde vários critérios de seleção são utilizados para determinar as principais características de aplicação do MSIP e do BLDC.
2.2. MATERIAIS PARA CONFECÇÃO DOS IMÃS PERMANENTES
As propriedades do imã permanente e a seleção do material apropriado são muito importantes no projeto do MSIP. O desempenho e aplicação do MSIP estão estritamente relacionados com as características do material do imã permanente. As propriedades magnéticas mais importantes são a coercitividade ܪ ou força coercitiva que representa o campo magnético necessário para desmagnetizar o imã ሺܤௗൌ Ͳሻǡ e a remanescência ܤݎ (magnetismo remanescente ou retentividade) que representa a indutância magnética residual que permanece após a retirada do campo magnético aplicado ሺܪ ൌ Ͳሻ.
O imã operará ao longo de uma curva característica entre esses dois pontos que dependem da relutância do circuito magnético e do nível do campo aplicado, como o campo de reação de armadura nas máquinas elétricas. Se este gráfico é linear sobre uma região de operação de funcionamento não há perdas de energia armazenada com as mudanças de relutância do circuito magnético (NASAR, 1987). O produto energético ܤܪெ também é uma característica importante na identificação dos materiais magnéticos e esta associado com a densidade de energia armazenada no imã permanente.
Existem três principais classes de imãs permanentes atualmente utilizados nos motores elétricos (GIERAS and WING, 2002): Alnicos (Al,Ni,Co); Cerâmicos Ferrite (Fe): Bário ferrite (BaOx6Fe2O3); Estrôncio ferrite (SrOx6Fe2O3)e Materiais de terras Raras: Samário
Cobalto (SmCo) e Neodímio Ferro Boro (NdFeB).
A curva de desmagnetização desses materiais é mostrada na Figura 1. Esta curva é sensível a variação paramétrica, ambos os valores de ܤݎ e ܪܿ diminuem com a temperatura. Os gráficos foram realizados para uma temperatura de 20ºC.
As seguintes características podem ser destacadas para cada material mencionado (BOSE, 2002):
•Ligas AlNiCo: Este imã tem a temperatura de serviço alta (550ºC), possui uma boa estabilidade térmica e alta densidade de fluxo. A sua desvantagem é que a sua curva de desmagnetização é extremamente não linear, sendo praticamente instável para máquinas de imãs permanentes, tendo sua aplicação bastante restrita.
•Terras Raras (Samário Cobalto): Este tipo de imã é feito de ferro, níquel, cobalto e terras raras de Samário. Estes imãs têm a vantagem de uma alta remanescência, alta densidade de energia definida pelo ܤܪெ e uma característica de desmagnetização linear. Sua temperatura de serviço pode ser maior que 300ºC e a estabilidade da temperatura (% da mudança em ܤௗ por ºC) é boa (-0,03%). Mas, este material é muito caro, devido a um fornecimento insuficiente de Samário.
•Terras Raras (Neodímio Ferro Boro (NdFeB): Este imã é o que possui maior densidade de energia, maior remanescência e uma coercitividade ܪܿ muito boa. Devido a sua alta densidade de energia o peso da máquina é reduzido. A desvantagem esta relacionada ao baixo serviço de temperatura (150º) e a susceptibilidade à oxidação quando não protegido por um revestimento. Além disso, o material é mais caro comparado ao Ferrite.
2.3. CONFIGURAÇÕES DA MÁQUINA SÍNCRONA DE IMÃS PERMANENTES
A maneira como os imãs são montados no rotor e a direção de campo do fluxo magnético determina o princípio básico de operação da máquina síncrona de imãs permanentes. Segundo Krishnan (2010), existem duas classificações para o campo de fluxo magnético no rotor: campo radial onde a direção do fluxo magnético é dada ao longo do raio da máquina e campo axial onde a direção do fluxo magnético é paralela ao eixo do rotor.
Para motores com imãs permanentes que possuem o rotor em forma de disco, é utilizado o termo de fluxo axial. Será abordada neste trabalho a forma de campo radial, que é a forma de campo de fluxo magnético mais comum no MSIP.
De acordo com Acarnley and Watson (2006), a estrutura do imã da máquina de imãs permanentes governa a posição e a variação da indutância e da fcem. O MSIP é caracterizado por ter um campo produzido pelos imãs permanentes no rotor e enrolamento de armadura no estator. Para o motor convencional com o rotor interior com campo radial existem quatro possíveis estruturas como mostra a Figura 2.
Figura 2 Colocação dos imãs no rotor do MSIP: a) Imãs de Superfície; b) Ímãs inseridos na Superfície; c) Ímãs no interior do rotor com orientação radial; d) Ímãs no Interior do rotor com
O MSIP com os imãs permanentes montados na superfície está ilustrado na Figura 2a). (SPMSM - Surface PM Synchronous machine). O SPMSM tem a indutância de enrolamento
por fase muito pequena. Nesta configuração normalmente os imãs são colados na superfície do rotor utilizando adesivos epóxis. Os imãs são compostos por modernos materiais de terras
raras, com a permeabilidade magnética próxima da unidade, o entreferro eficaz é igual à soma do entreferro físico entre o rotor e o estator mais a profundidade do imã. Conseqüentemente a corrente que passa nos condutores da armadura produz somente uma pequena componente de fluxo magnético, e então a indutância por fase é pequena e a diferença entre as indutâncias de eixo direto e em quadratura ܮௗ e ܮ também é pequena. Para o estudo em questão a estrutura dos imãs permanentes do motor utilizado se restringe somente aos imãs permanentes montados na superfície.
A Figura 2-b) mostra os imãs inseridos na superfície externas as lâminas do rotor, (SIPM – Surface isent PM synchronous machine) fornecendo uma superfície uniforme. Esta
configuração é freqüentemente usada nas máquinas com alimentação trapezoidal. Esta estrutura é mais robusta mecanicamente quando comparada a estrutura anterior.
As outras configurações Figura 2-c) e Figura 2-d) têm os imãs enterrados no corpo do rotor. Para a estrutura com os imãs no interior do rotor, (Interior PM Synchronous machine,
Figura 2-c)) a direção da magnetização é dada radialmente. Esta estrutura é mais comum em máquinas síncrona de imãs permanentes com alimentação senoidal, pois é fácil alcançar a variação senoidal necessária na densidade de fluxo sobre a periferia do entreferro. A alta permeabilidade magnética do material adjacente ao entreferro leva a valores de indutância da máquina maiores do que os das outras duas configurações anteriores. A estrutura dos imãs no interior do rotor com orientação circunferencial (Interior PM with circumferential orientation Synchronous machine, Figura 2-d)) requer uma grande quantidade de material, não sendo esta
configuração adequada para imãs com alta densidade de energia. Esta configuração também sofre significativo efeito de saliência.
Um estudo mais detalhado de várias configurações da máquina síncrona de imã permanente é realizado por SINGH et al (2006).
2.4. DETERMINAÇÃO DOS PARÂMETROS DO MSIP
A determinação ou o conhecimento dos parâmetros da máquina é muito importante para a aplicação do controle sensorless, pois muitas técnicas de estimação de posição e
Muitos métodos têm sido utilizados para a determinação de parâmetros da máquina síncrona de imãs permanentes. De modo geral, eles podem ser classificados como métodos computacionais e métodos experimentais (JING, 2004).
Segundo Jing, (2004) os métodos computacionais como, por exemplo, a técnica de elementos finitos (STUMBERGER and HRIBERNIK 1999) permite a avaliação de parâmetros que são difíceis de determinar experimentalmente e a estimação dos parâmetros pode ser obtida até mesmo antes do protótipo da máquina ser feito. Entretanto as limitações da modelagem computacional também devem ser levadas em consideração (SHIMMIN et al. 1995). Os parâmetros da máquina síncrona de imãs permanentes variam de forma não linear, devido à estrutura do rotor, estrutura dos imãs, a maneira como eles são montados no rotor, condições de carga e ângulo de fase atual. Portanto o modelo utilizado na simulação deve prever as variações dos parâmetros em diferentes condições.
Os métodos experimentais podem ser realizados através da utilização de testes estáticos (ensaio de rotor bloqueado) (EITELBERG and HARLEY 1987) (MELLOR, et al. 1991) testes sem carga (NEE, H.-P., LEFEVRE, et al. 2000) testes com carga (STUMBERGER, et al, 1999). E outros métodos (MILLER, 1981) também têm sido aplicados em muitas pesquisas.
2.5. MODELO MATEMÁTICO DO MSIP
Para efeito de compreensão e para se projetar um controlador ou um observador, para o MSIP, é necessário conhecer e determinar um modelo que represente a dinâmica deste motor a ser controlado e seus parâmetros fixos e variáveis com o tempo.
Os modelos matemáticos válidos para a variação instantânea da tensão e da corrente e que adequadamente descrevem o desempenho do MSIP, tanto no estado estacionário quanto no estado transitório são comumente obtidos pela utilização de algumas técnicas matemáticas tais como a transformada de Clark e a transformada de Park (ANEXO A).
2.5.1.Modelo da Dinâmica Elétrica
As seguintes considerações são feitas para determinar o modelo dinâmico do MSIP: 1. É considerado que a permeabilidade das peças de ferro do MSIP possuem densidade
infinita;
3. Os efeitos de perdas no ferro e o efeito de saturação bem como a variação de parâmetros são negligenciados;
4. Os enrolamentos do estator são balanceados e igualmente defasados entre si de 120º com uma força magneto-motriz (fmm) senoidal;
5. Não são consideradas perdas magnéticas.
A equação da tensão trifásica pode ser expressa em termos da corrente instantânea e do fluxo do estator:
abc abc abc abc
d
R i
dt
ψ
ν
=
+
G
G
G
(2.1)
onde:
[
]
Tabc a b c
ν
G
=
ν ν ν
(2.2)[
]
Tabc a b c
i
G
=
i
i i
(2.3)[
]
Tabc a b c
ψ
G
=
ψ ψ ψ
(2.4)Para um sistema magneticamente linear o fluxo do estator pode ser calculado de acordo com a equação (2.5):
abc
L
abc abci
abcmψ
=
+
ψ
G
G
G
(2.5)
onde:
aa ab ac abc ba bb bc ca cb cc
L
L
L
L
L
L
L
L
L
L
ª
º
«
»
=
«
»
«
»
¬
¼
(2.6) cos( ) 2 os( ) 3 2 os( ) 3 rabcm m r
r c
c
θ
π
ψ
λ
θ
π
θ
ª º « » « » « » = « − » « » « + » ¬ ¼ G (2.7)sendo ܮ, ܮ e ܮ a indutância própria do enrolamento do estator, ܮ, ܮ e ܮ são as indutâncias mútuas entre os enrolamentos e ߣ é o fluxo concatenado.
a fase. Então a indutância por fase é uma função do ângulo ʹߠ. Se somente é considerada uma simples distribuição senoidal sobre a saliência do rotor, a indutância própria e a mútua do motor síncrono poder ser escritas da seguinte forma (KRISHNAN, 2010):
0 2 0 2 0 2
( )
cos 2( )
2
( )
cos 2(
)
3
2
( )
os 2(
)
3
aa r s s r
bb r s s r
cc r s s r
L
L
L
L
L
L
L
L
L c
θ
θ
π
θ
θ
π
θ
θ
=
+
=
+
−
=
+
+
(2.8) 0 2 0 2 0 2 2( ) ( ) cos 2( )
3 2
( ) ( ) cos 2( )
3
( ) ( ) cos 2( )
ab r ba r m m r
ac r ca r m m r
bc r cb r m m r
L L L L
L L L L
L L L L
π
θ
θ
θ
π
θ
θ
θ
θ
θ
θ
= = + −
= = + +
= = +
(2.9)
onde ܮ௦ e ܮ são as componentes medias da indutância própria e da indutância mútua respectivamente eܮ௦ଶ e ܮଶ são as amplitudes das componentes senoidais.
O modelo do MSIP pode ser simplificado se o modelo trifásico da tensão for transformado em uma forma de espaço vetorial utilizando a transformada Ͳߙߚ , conhecida como a transformada de Clark, de acordo com a seguintes equações:
0 abc 0 abc
i
αβ=
T
→αβi
G
(2.10)
onde:
0
1 1
1 2 2
2 3 3
0 2 2
3
1 1 1
2 2 2
abc T →αβ
− − ª º « » « − » = « » « » « » ¬ ¼ (2.11)
A Equação (2.1) pode ser reescrita da seguinte forma:
0
0 0 0
d
R
i
dt
αβ
αβ αβ αβ
ψ
ν
=
+
G
G
G
(2.12) onde: 0 0 Tαβ α β
ν
G
=
ª
¬
ν ν ν
º
¼
(2.13)0 0
T
i
αβ=
ª
¬
i
αi
βi
º
¼
G
(2.14)
0 0
T
αβ α β
O fluxo do estator no eixo de coordenada Ͳߙߚ pode ser escrito em função da componente de indutância ao longo dos eixos direto e de quadratura ܮௗ e ܮ. Conforme a Equação (2.16).
( )
cos( )
qq qd m r
dq dd m r
L i
L i
sen
L i
L i
α β α
β β α
ψ
λ
θ
ψ
λ
θ
=
+
+
=
+
+
(2.16)Logo, a equação da tensão do estator no referencial estacionário é dada por:
( )
cos( )
qq qd r
s qq qd m
qd dd r
s qd dd m
dL
di
di
dL
dsen
R i
i
L
L
i
dt
dt
dt
dt
dt
dL
di
di
dL
d
R i
i
L
L
i
dt
dt
dt
dt
dt
β α
α α β α
β α
β β β α
θ
ν
λ
θ
ν
λ
=
+
+
+
+
+
=
+
+
+
+
+
(2.17)onde as indutâncias próprias ܮௗௗ e ܮ são dadas pela Equação (2.18):
(
) (
)
(
) (
)
1
cos(2 )
2
1
cos(2 )
2
qq q d q d r
dd q d q d r
L
L
L
L
L
L
L
L
L
L
θ
θ
ª
º
=
¬
+
+
−
¼
ª
º
=
¬
+
−
−
¼
(2.18)
As indutâncias próprias podem ser compactamente representadas por:
1 2 1 2
cos(2 )
cos(2 )
qq r dd rL
L
L
L
L
L
θ
θ
=
+
=
−
(2.19)onde:
1 2
1
(
)
2
1
(
)
2
q d q dL
L
L
L
L
L
=
+
=
−
(2.20)
A indutância mútua entre os eixos d e q, assumindo uma variação senoidal, pode ser
dada por:
1
(
)sin(2 )
2
dq d q r
L
=
L
−
L
θ
(2.21)De acordo com Krishnan, (2010) na estrutura que compõe o motor de imãs interiores o entreferro no eixo do enrolamento é mínimo, resultando em ܮௗ ܮ. No MSIP sem saliência
Substituindo as Equações (2.18) e (2.21) na Equação da tensão do estator (2.17) resultará em uma expressão dependente da posição do rotor conforme segue:
1 2 2
2 1 2
2
cos(2 )
(2 )
(2 )
cos(2 )
cos(2 )
(2 )
( )
2
(2 )
cos(2 )
cos( )
r r
s
r r
r r r
r m r
r r r
i
L
L
L sen
d
i
R
i
L sen
L
L
dt
i
i
sen
sen
L
i
sen
α α α
β β β
α
β
ν
θ
θ
ν
θ
θ
θ
θ
θ
ω
λ ω
θ
θ
θ
−
−
ª
º
ª º
ª
º
ª º
=
+
«
»
« »
«
»
« »
−
+
¬
¼
¬
¼
¬ ¼
¬ ¼
−
ª º
−
ª
º
ª
º
+
«
»
« »
+
«
»
−
−
¬
¼
¬ ¼
¬
¼
(2.22)
De acordo com a Equação (2.22) é possível notar que o terceiro termo existe por causa da saliência, quando ሺܮ ് ܮௗሻ. No caso do motor sem saliência as indutâncias podem ser considerados iguais e então ሺܮଶൌ Ͳሻ. Assim, o segundo termo da matriz, dependente da posição e de ܮଶ será igual a zero, e a equação da tensão (2.22) se reduz em uma expressão mais simples dada por:
1
1
0
( )
0
cos( )
r
s m r
r
i
L
d
i
sen
R
i
L
dt
i
α α α
β β β
ν
θ
λ ω
ν
θ
−
ª
º
ª º
ª
º
ª º
ª
º
=
+
+
«
»
« »
«
»
« »
«
»
¬
¼
¬
¼
¬
¼
¬ ¼
¬ ¼
(2.23)A equação da tensão do estator também pode ser escrita no referencial girante, onde a matriz de indutância do sistema se torna independente da posição do rotor, levando assim a compactação e simplificação do sistema de equações.
A relação entre a corrente no referencial estacionário ሺߙ െ ߚሻ e no referencial girante ሺ݀ െ ݍሻ pode ser dada pela Equação (2.24), aplicando a transformada de Park (ANEXO A)
0 0
dq dq
i
=
T
αβ →i
αβG
G
(2.24)
onde:
0
cos( )
sin( )
sin( ) cos( )
r r
dq
r r
T
αβθ
θ
θ
θ
→
ª
º
=
«
»
−
¬
¼
(2.25)De maneira análoga a equação da tensão do estator pode ser dada por:
0 0
dq
T
αβ dq αβν
G
=
→ν
G
(2.26)Para o MSIP a velocidade no eixo de referencia girante é dada pela equação:
r r
θ
=
ω
(2.27)0
d d s d r q d
s
q q r d s q q m r
i
R
pL
L
i
R
i
L
R
pL
i
ν
ω
ν
ω
λ ω
+
−
ª º
ª º ª
º ª º ª
º
=
+
+
« »
« » «
» « » «
»
+
¬
¼
¬ ¼
¬ ¼ ¬
¼ ¬ ¼
(2.28)sendo p usado para indicar a operação de derivada.
2.5.2.Modelo da Dinâmica Mecânica
O torque eletromagnético é uma das variáveis de saída mais importante que determina a dinâmica mecânica do motor. Assim como também a posição e a velocidade, o torque eletromagnético pode ser obtido de acordo com a seguinte equação (KRISHNAN, 2010).
3
(
)
2 2
e m d q d q
P
T
=
ª
¬
λ
+
L
−
L i
º
¼
i
(2.29)onde P é o número de pólos.
O torque também pode ser escrito em função da velocidade mecânica do motor, caracterizando a dinâmica eletromecânica:
m
e L m
d
T
J
T
B
dt
ω
ω
=
+
+
(2.30)onde J é o momento de inércia e B é o coeficiente de atrito viscoso.
Isolando-se a velocidade mecânica da Equação (2.30) resulta em:
(
)
1
m
T
eT
LB
mJ
ω
=
−
−
ω
(2.31)Substituindo a Equação (2.29) na Equação (2.31) obtém-se:
1 3
(
)
2 2
m m d q d q L m
P
L
L i
i
T
B
J
ω
=
§
¨
ª
¬
λ
+
−
º
¼
−
−
ω
·
¸
©
¹
(2.32)No MSIP a relação entre a velocidade elétrica e mecânica pode ser dada pela seguinte equação:
2
m rP
ω
=
ω
§
¨
·
¸
©
¹
(2.33)nas equações da derivada de corrente e também a multiplicação das correntes ݅ௗ e ݅ na derivada da velocidade mecânica.
1
1
1 3
(
)
2 2
2
q s
d d r d d
d d d
s d m
q q r q r q
q q q q
m m d q d q L m
r m
L
R
i
i
i
L
L
L
R
L
i
i
i
L
L
L
L
P
L
L i
i
T
B
J
P
ω
ν
λ
ω
ω
ν
ω
λ
ω
θ
ω
−
=
+
+
−
=
−
−
+
§
ª
º
·
=
¨
¬
+
−
¼
−
−
¸
©
¹
=
(2.34)
2.5.3.Modelo Matemático por Unidade (PU)
A normalização das equações do modelo matemático se faz necessária para a implementação dessas equações em um processador digital de sinal de ponto fixo (TMS320F2812). Para se utilizar este tipo de processador, se faz necessário reduzir a amplitude das variáveis no sentido de se obter valores fracionários com a máxima precisão. Para o TMS320F2812, (TEXAS INSTRUMENTS, 1997), utilizado na obtenção dos resultados experimentais uma boa precisão pode ser obtida utilizando o formato Q15 obtido através da utilização da biblioteca IQMath desenvolvida pelo próprio fabricante. Porém a faixa dinâmica deste formato específico é pequena, limitada entre 1 e -1 somente.
A normalização do modelo matemático do MSIP é realizada através da determinação das bases das variáveis trifásicas ሺܽǡ ܾǡ ܿሻ e bifásicas.ሺ݀ǡ ݍሻ.
A base da corrente por fase do motor pode ser calculada de acordo com a seguinte equação:
min
2
base no alI
=
I
(2.35)Para o cálculo da tensão base pode-se utilizar a tensão de barramento do link DC de acordo com a seguinte equação:
/ 3
base dc
V
=
V
(2.36)A potência base pode ser definida como:
3
2
base base base