Universidade Nova de Lisboa
Faculdade de Ciências e Tecnologia
Secção de Electrotecnia e Máquinas EléctricasMáquina Síncrona em Regime Transitório
após Brusco Curto-Circuito no Estator
por
João Leal Fernandes
Dissertação apresentada na Faculdade de Ciências e Tecnologia da Universidade Nova de Lisboa para obtenção do grau de Mestre em Engenharia Electrotécnica e de Computadores.
Orientador científico:
Prof. Doutor Amadeu Leão Rodrigues
i
Agradecimentos
Quero antes de mais expressar a minha gratidão ao Prof. Doutor Amadeu Leão Rodrigues pela disponibilidade demonstrada no decorrer do trabalho e todo apoio prestado.
Agradecimento à minha empresa Delphi Automotive Systems – Portugal S.A., por me ter possibilitado a inscrição no Mestrado de Engenharia Electrotécnica e de Computadores ao abrigo do protocolo existente entre as duas instituições. De destacar ainda, o facto de a Delphi ter facilitado a utilização de instrumentação de medida, através da qual foi possível extrair os elementos fundamentais para a realização deste trabalho.
Agradeço ao Departamento de Engenharia Electrotécnica da Faculdade de Ciências e Tecnologia da Universidade Nova de Lisboa o facto de ter tido à disposição as excelentes condições do Laboratório de Máquinas Eléctricas que foram determinantes para a realização deste trabalho.
Aos professores que me sensibilizaram para área de Máquinas Eléctricas, no decorrer dos meus estudos no Instituto Politécnico de Setúbal, Doutor Manuel Gaspar e Doutor Jorge Esteves.
Finalmente quero agradecer à minha mulher que me soube transmitir uma palavra de força e coragem para ultrapassar algumas dificuldades encontradas durante o tempo de elaboração deste trabalho.
Sumário
Sumário em Português.
A partir das equações de Park pretende-se modelar a máquina de rotor de pólos salientes com enrolamentos amortecedores e prever o seu funcionamento em regime transitório.
iii
Abstract
From Park equations is intended to create the machine model of salient pole rotor with damping windings and to foresee its running in transitory regime.
The objective of the dissertation is to establish the generalized theory of the synchronous machine in transitory regime and to perform the laboratorial experiments in order to get the short circuit symmetrical currents, phase to phase and phase to neutral. From these study it is possible to get the transitory time constants and transitory reactances of the machine.
The knowledge of these constants is very important for the design of the protections of the alternator.
Dedicatória
v
Simbologia e Notações
Lista contendo símbolos e notações usados ao longo da dissertação.
f - frequência da rede. [Hz]
ra - Resistência de dispersão do estator (armadura). [Ω]
rf - Resistência de dispersão do enrolamento do campo (rotor). [Ω]
f
u - Tensão de alimentação do enrolamento de campo. [V]
rkd - Resistência do enrolamento amortecedor eixo directo. [Ω]
rkq - Resistência do enrolamento amortecedor eixo quadratura. [Ω]
f
X - Reactância do enrolamento de campo [Ω]
X+ - Reactância Síncrona [Ω]
Xd - Reactância Síncrona do enrolamento do eixo directo. [Ω]
Xd - Reactância Síncrona do enrolamento do eixo directo. [Ω]
Xq - Reactância Síncrona do enrolamento do eixo quadratura. [Ω]
X'd - Reactância Transitória do enrolamento do eixo directo. [Ω]
X'q - Reactância Transitória do enrolamento do eixo quadratura. [Ω]
X''d - Reactância Subtransitória do enrolamento do eixo directo. [Ω]
X''q - Reactância Subtransitória do enrolamento do eixo quadratura. [Ω]
kd
X - Reactância do enrolamento amortecedor eixo directo. [Ω]
kq
X - Reactância do enrolamento amortecedor eixo quadratura. [Ω]
md md
X = ωL - Resistência de magnetização do eixo directo. [Ω]
mq mq
X = ωX - Resistência de magnetização do eixo quadratura. [Ω]
f f
X = ωl - Reactância de dispersão do campo (rotor). [Ω]
kd kd
X = ωl - Reactância de dispersão do enrolamento amortecedor directo. [Ω]
kq kq
X = ωl - Reactância de dispersão do enrolamento amortecedor quadratura. [Ω]
X2 - Reactância de sequência negativa [Ω]
X0 - Reactância de sequência zero [Ω]
a
T - Constante de tempo na armadura [s]
' d
T - Constante de tempo transitória do enrolamento do eixo directo em
curto circuito.
[s]
' d0
T - Constante de tempo transitória do enrolamento do eixo directo
em circuito aberto.
[s]
' q
T - Constante de tempo transitória do enrolamento do eixo quadratura
em curto circuito.
[s]
' q0
T - Constante de tempo transitória do enrolamento do eixo quadratura
em circuito aberto.
[s]
'' d
T - Constante de tempo subtransitória do enrolamento do eixo directo
em curto circuito.
[s]
'' d0
T - Constante de tempo subtransitória do enrolamento do eixo directo
em circuito aberto.
[s]
''
q
T - Constante de tempo subtransitória do enrolamento do eixo
quadratura em curto circuito.
[s]
'' 0
q
T - Constante de tempo subtransitória do enrolamento do eixo
quadratura em circuito aberto.
[s]
kd
T - Constante de tempo do enrolamento do eixo amortecedor eixo
directo.
[s]
kq
T - Constante de tempo do enrolamento do eixo amortecedor eixo
quadratura.
[s]
'' d
I - Corrente Subtransitória do eixo directo [A]
' d
I - Corrente Transitória do eixo directo [A]
d
I - Corrente Síncrona do eixo directo [A]
'' q
I - Corrente Subtransitória do eixo quadratura [A]
' q
I - Corrente Transitória do eixo quadratura [A]
q
I - Corrente Síncrona do eixo quadratura [A]
n
U - Tensão nominal de uma máquina. [V]
n
I - Corrente nominal de uma máquina. [A]
P - Potência Activa de uma máquina. [W]
exc
U - Tensão de excitação de uma máquina. [V]
exc
I - Corrente de excitação de uma máquina. [A]
cosϕ - Coeficiente de factor de potência.
N - Velocidade de uma máquina em rotações por minuto. [rpm]
f.m.m. - Força magneto-motriz [V]
f.e.m. - Força electro-motriz [V]
P - Permeância magnética
[Ω-1]
ϕ - Ângulo de desfasamento entre tensão e corrente [º]
δ - Ângulo de carga de uma máquina [º]
q
L - Indutância do enrolamento do eixo quadratura [H]
md
L - Indutância de magnetização do eixo directo [H]
mq
L - Indutância de magnetização do eixo quadratura [H]
a
l - Indutância da armadura do estator [H]
f
L - Indutância do enrolamento de campo [H]
kd
L - Indutância do enrolamento amortecedor do eixo directo [H]
kq
L - Indutância do enrolamento amortecedor do eixo quadratura [H]
R
vii
Índice
Pag.
Capítulo 1
– Breve Descrição Máquina Síncrona Trifásica
... 11.1 - Constituição da Máquina Síncrona Trifásica... 1
1.1.1 - Máquina Síncrona com Rotor Cilíndrico... 2
1.1.2 - Máquina Síncrona de Pólos Salientes... 2
1.2 - Princípio de Funcionamento da Máquina Síncrona... 8
1.2.1 - Equação Vectorial da Máquina Síncrona de Rotor Cilíndrico... 8
1.2.2 - Equação vectorial da Máquina Síncrona de Rotor de Pólos Salientes... 13
1.2.3 - Variação da Reactância em Função da Posição do Rotor... 14
1.2.4 - Ensaio de Escorregamento para Determinação de Xd e Xq... 16
Capítulo 2
– Transformação de Park
... 192.1 - Transformação do Sistema Trifásico em Sistema Bifásico... 19
Capítulo 3
– Equações Gerais da Máquina Síncrona
... 233.1 – Modelo da Máquina Síncrona de Pólos Salientes... 23
Capítulo 4
– Constantes da Máquina Síncrona
... 304.1 – Significado Físico dos Parâmetros da Máquina Síncrona... 30
4.1.1 - Período Sub-Transitório... 30
4.1.2 - Período Transitório... 32
4.1.3 - Regime Permanente... 32
4.1.4 – Funcionamento do Enrolamento Amortecedor... 33
4.2 – Análise do Modelo da Máquina... 34
4.2.1 - Esquema Eléctrico da Máquina em Regime Subtransitório... 34
4.2.2 - Esquema Eléctrico da Máquina em Regime Transitório... 37
4.2.3 - Esquema Eléctrico da Máquina em Regime Permanente... 39
Capítulo 5
– Equações da Máquina do Curto-Circuito
... 405.1 - Equações das Reactâncias... 40
5.1.1 – Reactância Síncrona... 40
5.1.2 – Reactância Transitória... 42
5.1.3 – Reactância Subtransitória... 43
5.2 – Equações de Curto-Circuito Simétrico Trifásico em Vazio... 44
5.2.1 - Equações das Correntes nas Fases a, b e d... 45
5.2.2 - Equação da Corrente de Campo... 52
5.2.3 - Equação do Binário Resistente... 54
5.3 - Curto-Circuito Trifásico Assimétrico Fase-Fase em Vazio... 57
5.3.1 - Equações das Correntes nas Fases... 57
5.3.2 – Equação das Corrente de Campo... 59
5.4 - Curto-Circuito Trifásico Assimétrico Fase-Neutro em Vazio... 60
5.4.1 - Equações das Correntes na Fase e no Neutro... 60
5.4.2 - Equação da Corrente de Campo... 61
5.5 - Curto-Circuito Trifásico Assimétrico Fase-Fase-Neutro em Vazio... 62
5.5.1 – Equações das Correntes nas Fases... 62
5.5.2 - Equação da Corrente de Campo... 64
Capítulo 6
– Ensaios Laboratoriais
... 656.1 - Equipamento para o Ensaio no Laboratório... 65
6.1.1 - Bancada de Ensaios... 65
6.1.2 - Equipamento de Medida... 66
6.2 - Ensaio Experimental para Obtenção das Características em Vazio e Curto- Circuito... 67 6.3 - Ensaio em Curto-Circuito Simétrico entre as Três Fases... 70
6.3.1 –Simulação de Cálculo das Correntes de Curto-Circuito... 72
6.4 - Ensaio em Curto-Circuito Assimétrico entre Duas Fases... 84
6.4.1 –Simulação de Cálculo das Correntes de Curto-Circuito... 89
6.5 - Ensaio em Curto-Circuito Assimétrico entre Fase e Neutro ... 93
6.5.1 – Simulação de Cálculo das Correntes de Curto-Circuito... 97
Capítulo 7
– Comportamento Dinâmico do Alternador
... 1097.1 - Comportamento do Binário durante o Curto-Circuito... 109
7.1.1 – Determinação dos Parâmetros Mecânicos... 110
7.1.2 – Cálculo do Momento de Inércia do rotor... 110
7.1.3 – Métodos para Determinar o Momento de Inércia... 112
Capítulo 8
– Conclusões Finais.
... 114Capítulo 9
– Trabalho Futuro
... 115Capítulo 10 – Bibliografia
... 116Anexos
... 117Anexo I – Tabelas de Resultados
... 118Anexo II – Instrumentação de Medida
... 122Anexo III – Fotografias da Bancada de Ensaios
... 124Anexo IV
–
Curto-Circuito Simétrico
... 127ix
Anexo VI – Curto-Circuito Assimétrico Fase-Neutro
... 129Anexo VII – Curto-Circuito Assimétrico Fase-Fase-Neutro
... 130Breve Descrição da Máquina
Síncrona Trifásica
Capítulo
1
1.1 - Constituição da máquina síncrona trifásica.
A máquina síncrona trifásica é constituída por três enrolamentos, cujos eixos magnéticos estão desfasados de 120º eléctricos, que constituem o estator. No seu interior existe o rotor que produz um fluxo magnético estático criado por um corrente continua (excitação).
Esta máquina como todas as máquinas eléctricas é reversível, isto é fornecendo energia
mecânica ao veio do rotor, colocando-o a rodar com uma velocidade angular ω esta máquina
converte a energia mecânica em energia eléctrica no estator (gerador ou alternador);
alternativamente, alimentando o estator com um sistema trifásico de tensões, fornecendo-lhe energia eléctrica a máquina converte-a em energia mecânica (motor) que surge no seu veio.
a) Rotor cilíndrico b) Rotor de pólos salientes
Fig. 1.1 - Máquina de rotor cilíndrico e máquina de rotor de pólos salientes
A máquina síncrona pode ser monofásica ou polifásica, bipolar ou tetrapolar (rotor cilíndrico) ou multipolar (rotor de pólos salientes). Este trabalho visa o estudo da máquina síncrona trifásica de pólos salientes e o seu comportamento em regime transitório.
Capitulo 1 – Breve Descrição da Máquina Síncrona Trifásica 2
1.1.1 - Máquina Síncrona com Rotor Cilíndrico
A forma física do rotor irá influenciar bastante as características da máquina.
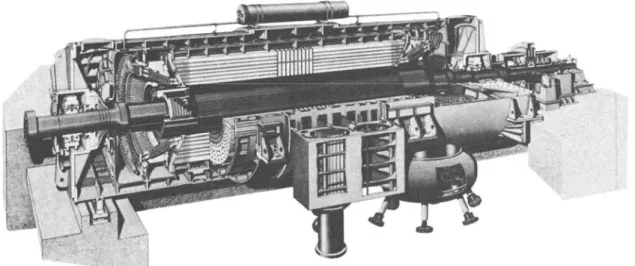
O rotor cilíndrico é constituído por um núcleo de forma cilíndrica, em regra geral é forjado ou maciço, onde se abriram propositadamente cavas, axialmente, para encaixar o enrolamento indutor, tendo normalmente um grande comprimento e um pequeno diâmetro, menor que um metro nas máquinas de grande potência. As cavas podem ser fechadas por talas metálicas, em geral de bronze ou outro material não magnético. Assim o enrolamento indutor resistirá muito bem à força centrífuga. Por conseguinte, a máquina de rotor cilíndrico pode rodar a altas velocidades porque o seu rotor resiste bem aos esforços centrífugos a que fica sujeito. Logo é susceptível de ser accionada por uma turbina a vapor que é uma máquina motriz que trabalha a altas velocidades. Por este motivo a máquina de rotor cilíndrico é também conhecida por turboalternador.
Fig. 1.2 – Vista em corte de um turbo alternador de 700MVA 50 Hz 3000r.p.m 20KV
Como se pode observar na figura 1.2 este tipo de rotor é feito de uma só peça cilíndrica ao longo da qual são abertas cavas a receber os enrolamentos do campo indutor.
1.1.2 - Máquina Síncrona de Pólos Salientes
A máquina de pólos salientes deverá rodar a baixas velocidades, é em regra geral accionada por turbinas hidráulicas que apresentam baixa velocidade, porque caso contrário devido à configuração dos pólos a força centrifuga atingiria valores que poderiam comprometer a resistência mecânica da fixação dos terminais polares.
Logo, o rotor de pólos salientes deverá ter um grande número de pólos para gerar f.e.m. à frequência normalizada de 50 Hz. Tendo um grande número de pólos, tem em geral um grande diâmetro e pequeno comprimento axial.
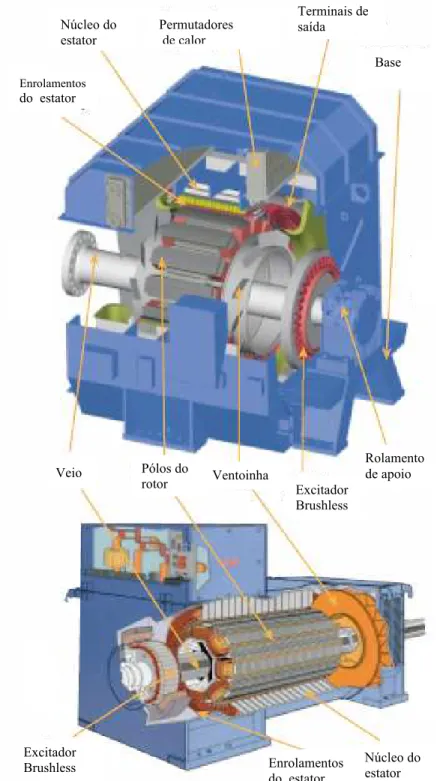
A figura 1.3, permite ter uma ideia dos dois tipos de máquina, com a de pólos salientes em cima e a de rotor cilíndrico em baixo. Os aspectos construtivos mais marcantes podem ser aqui observados para máquinas com a mesma potência.
Terminais de saída
Núcleo do estator
Permutadores de calor
Base
Enrolamentos do estator
Excitador Br
ushless
Rolamento de apoio Ventoinha
Pólos do rotor Veio
Núcleo do estator Enrolamentos do estator Excitador
Brushless
Capitulo 1 – Breve Descrição da Máquina Síncrona Trifásica 4
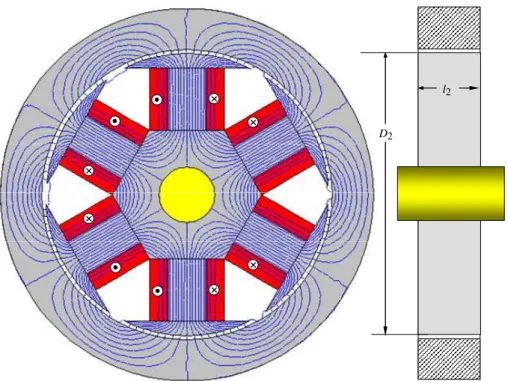
Nas figuras 1.4 e 1.5, podem ser comparados os dois tipos de rotores de máquinas síncronas, em que na primeira está representado o rotor cilíndrico e na segunda o de pólos
salientes. Tendo o mesmo volume prismático , então as duas máquinas têm
potências equivalentes.
2 2 2 1 2
1l D l
D =
Fig. 1.4 - Gerador síncrono bipolar de rotor cilíndrico (turboalternador) D1 < l1 D1
l1
l2 D2
Fig. 1.5 - Gerador síncrono hexapolar de rotor de pólos salientes (hidroalternador) D2 > l2
A frequência da f.e.m. gerada no estator está relacionada com a velocidade do rotor
pela seguinte expressão,
f
60
Np
f = (1.1)
onde N é o número de rotações por minuto e p o número de pares de pólos.
Os rotores cilíndricos como estão dimensionados para altas velocidades deverão ter um pequeno número de pares de pólos, como foi salientado anteriormente. Por outro lado pode
ser observada na figura 1.6, a máquina síncrona de pólos salientes, também conhecida por hidroalternador, onde a quantidade de pólos é sempre superior podendo ser cinco vezes mais.
Fig. 1.6 - Hidroalterador visto em corte
1 – Cobertura 7 – Rolamento 13 - Travessa
2 - Anel colector 8 – Cruzeta Inferior 14 – Conduta em expiral
3 – Cruzeta superior 9 – Eixo 15 – Turbina
4 – Rotor de pólos Salientes 10 – Aro de regulação 16 – Conduta de Saída
5 – Estator 11 – Cobertura da turbina 17 – Tubo de sucção
6 – Pás de refrigeração 12 – Pá directriz da turbina
Capitulo 1 – Breve Descrição da Máquina Síncrona Trifásica 6
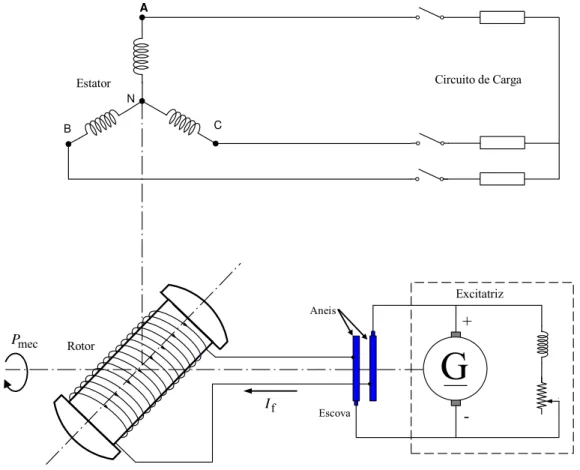
excitação é injectada através de duas escovas que assentam nos anéis do rotor. A excitatriz está também directamente acoplada ao mesmo veio do gerador e da turbina. Posto isto, pode-se passar para a reprepode-sentação esquemática da máquina síncrona reprepode-sentada na figura 1.7.
Fig. 1.7 - Esquema clássico de excitação da máquina síncrona de pólos salientes
A
B C
N
Estator
Rotor
G
Circuito de Carga
Excitatriz
Escova Aneis
mec
P
f
I
+
-
A figura 1.7 representa o tipo clássico de excitação dos alternadores de forma simplificada, os sistemas de excitação que são aplicados industrialmente, são evidentemente mais complexos e sofisticados, pertencendo ao universo dos Sistemas de Controlo de um
centro produtor de energia. O controlo preciso sobre a corrente de excitação If permite criar
um fluxo induzido no rotor, adaptativo às condições de carga, estes sistemas fazem parte de controlo P.I.D.
Estator Rotor
Fig. 1.8 – Pormenor de construção do estator e do rotor
O estator da máquina síncrona de pólos salientes consiste num núcleo laminado de chapas de ferro macio empilhadas, com cavas internas, um grupo de enrolamentos trifásicos distribuídos no estator e alojados nas cavas e uma protecção exterior que o envolve, onde estão os rolamentos para o eixo do rotor.
O número de voltas dos enrolamentos do estator é igualmente distribuída sobre os pares
de pólos e os eixos das fases, desfasados 2π/3 radianos.
A sua construção está mais vocacionada para aplicações de baixa velocidade onde o rácio do diâmetro com comprimento do rotor pode ser feito de forma a acomodar o maior número de pólos. As máquinas síncronas de pólos salientes são frequentemente usadas nos hidrogeradores para adaptarem a baixa velocidade de funcionamento dos hidrogeradores tal como se pode observar na figura 1.6.
Na figura 1.9 pode-se observar um exemplo de uma secção em corte do rotor de pólos salientes com enrolamento amortecedor. Os enrolamentos amortecedores são constituídos por barras de cobre embutidas em cavas abertas nas peças polares e ligadas todas entre si por meio de um anel. Resulta assim um enrolamento em gaiola ou em curto-circuito.
Enrolamento amortecedor Enrolamento
de excitação
Núcleo
Enrolamento amortecedor
Fig. 1.9 - Rotor de pólos salientes com enrolamento amortecedor
Na figura 1.10 pode observar-se um rotor de pólos salientes com as respectivas barras do enrolamento amortecedor.
Capitulo 1 – Breve Descrição da Máquina Síncrona Trifásica 8
1.2 - Princípio de Funcionamento da Máquina Síncrona
Por simplicidade vai ser considerada a máquina síncrona de rotor cilíndrico por ter um entreferro constante, a distribuição da densidade de fluxo magnético ao longo da periferia do rotor, ou do entreferro é sinusoidal. Este campo com o rotor parado é estacionário, semelhante a um magneto permanente com um pólo norte e um pólo sul.
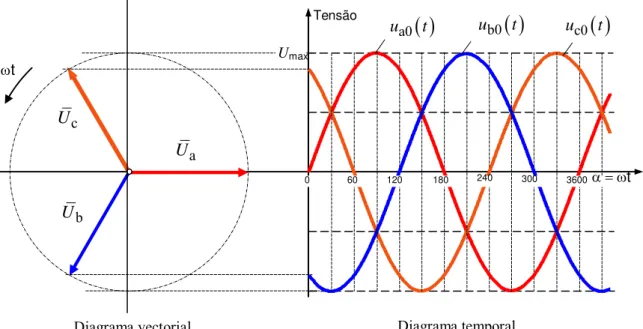
Quando o rotor for animado com movimento de rotação, o que se observa num determinado ponto da periferia do estator, ou do entreferro, é um campo magnético de intensidade variável entre dois máximos de sentidos opostos. Assim estão reunidas as condições para a formação do campo girante. Este campo girante, vai induzir f.e.m.s nos enrolamentos do estator. Em vazio as tensões aos terminais têm a forma indicada na figura 1.11.
Quando o rotor estiver parado em relação ao estator, não há variação de fluxo e portanto não existe f.e.m. induzida, mesmo que o rotor esteja excitado.
Tensão
( )
a0
u t ub0
( )
ta
U
b
U
c
U
0
Umax
60 120 180 240 300 3600α = ωt
ωt
( )
c0
u t
Diagrama vectorial Diagrama temporal
a U c
U
b
U
Fig. 1.11 - Representação do sistema trifásico de tensões através do diagrama vectorial e temporal
1.2.1 - Equação Vectorial da Máquina Síncrona de Rotor Cilíndrico
Pretende-se estabelecer uma equação que relacione a tensão U aos terminais da máquina em função da velocidade angular ω do rotor, da corrente de excitação If e da corrente de carga I debitada sobre um circuito de utilização Zu. Para isso vai ser considerado o esquema de ligações simplificado representado na figura 1.12, em que o gerador alimenta uma carga simétrica Zu. Aplicando a lei geral de indução ao caminho fechado no estator. γ
resulta,
(1.2)
(
)
1 1R 11 1 1
,
t
d d d
E d i r U
dt dt dt
Ψ ⎛ Ψ Ψ ⎞
γ = + = − = −⎜ + ⎟
⎝ ⎠
∫
v
Eem que,
A
B C
N Estator
Rotor
Circuito de Carga
u
Z
u
Z
u
Z
1 r
11 L
+
-γ3 i
2 i
f i
α φr
ω
Fig. 1.12 - Máquina síncrona simplificada 1 U
1 1R 1
Ψ = Ψ + Ψ E é o fluxo total ligado com a fase1 do estator.
1R
Ψ é o fluxo ligado com a fase 1 produzido pelo rotor.
1E
Ψ é o fluxo ligado com a fase 1 devido às três correntes do estator.
Quando a máquina está em vazio, as correntes das três fases são nulas, portanto a
expressãoΨ1E =0 é nula. Logo, o termo d 1R
dt
Ψ
− representa a f.e.m. em vazio do gerador
induzida na fase 1 devido à variação do fluxo produzido pelo movimento do rotor. O fluxo ligado com a fase 1 produzido pelo rotor vale,
1R IR LR1
Ψ = +
em que IRé a corrente do rotor e LR1 é o coeficiente de auto indução entre o rotor e a fase 1.
Como o rotor está animado de rotação com uma velocidade angular , não é
constante mas terá uma expressão do tipo,
ω LR1
R1 R1maxcos( 0 )
Capitulo 1 – Breve Descrição da Máquina Síncrona Trifásica 10
em que é o ângulo que o eixo magnético do rotor e da fase 1 do estator formam entre si no
instante da origem dos tempos. 0
α
1R IR LR1maxcos( 0 t)
Ψ = + α + ω (1.3)
Logo a f.e.m induzida no estator devido ao fluxo do rotor é dada por,
1
R R1maxsen( 0 ) 0sen( 0 )
d
I L t E
dt
Ψ
− = ω α + ω = α + ωt (1.4)
resultando uma tensão sinusoidal e de frequência igual à velocidade angular do rotor, da seguinte forma,
0
( ) j t
e t =E e ω e E0 =IRωLR1max (1.5)
donde se conclui que a amplitude da f.e.m. E0 é proporcional à corrente de excitação If e à
velocidade angularω do rotor. Para manter a frequência constante, o único processo capaz de
variar a f.e.m. da máquina em amplitude é através de variação da corrente de excitação.
Analisado o estator em carga têm-se que Ψ1Eé o fluxo ligado com a fase 1 do estator
devido às correntes que percorrem o estator, ou seja
1E i L1 11 i L2 21 i L3 31
Ψ = + + (1.6)
Em que e são os coeficientes de indução mútua entre a fase 1 e as fases 2 e 3
respectivamente. 21
L L31
Num sistema trifásico sem neutro existe a seguinte relação de correntes,
1 2 3 0
i + + =i i donde i3 = − −i1 i2
) Substituindo em (1.6) resulta,
1E i L1 11 i L2 21 i L3 31 i L1( 11 L31) i2(L21 L31
Ψ = + + = − + −
Simplificando,
(
)
1E i L1 11 L31
Ψ = −
Considerando-se que o circuito magnético da máquina é simétrico e L21=L31, sendo L11
o coeficiente de indução relativo ao fluxo principal que liga a bobina 1 com a 2 e 3 e o λ
coeficiente de indução relativa ao fluxo de dispersão. Como os eixos magnéticos fazem um ângulo de 120° entre si,
(
)
(
)
31 M 11 11
1 cos 120º cos 120º
2
L =L =l =− l (1.7)
A expressão deΨ1E fica, então
1E 1 11 1
3 2
i ⎛ l ⎞ i L
Ψ = ⎜ + λ =⎟
⎝ ⎠ +
Considerando-se 3 11
2
L+ = l +λ, coeficiente de auto-indução trifásico, a f.e.m. induzida
na fase 1 então devido ao fluxo produzido pelas 3 correntes estatóricas é dado por,
1E 1
d d
L
dt dt
Ψ
− = − + i (1.8)
Suprimindo por comodidade os índices 1 e substituindo as expressão (1.5) e (1.8) na equação(1.1) resulta,
0
R j t
di
i U E e L
dt
ω
+ = − +
ou,
R 0
j t
di
U L i E e
dt
ω
+ + + = (1.9)
que é uma equação de valores instantâneos onde,
U - é a tensão simples (entre fase e neutro) aos terminais do estator.
di L
dt
+ - é uma queda de tensão indutiva devido às correntes que atravessam as três fases do
rotor. R
i - é a queda de tensão óhmica numa fase do estator.
j t
Ee ω - é a f.e.m. induzida por fase em vazio devido ao rotor.
Em regime alternado sinusoidal e desprezando a saturação do circuito magnético tem-se,
j t
U =Ue ω e I=Iej tω
Substituindo na equação (1.9) resulta a seguinte equação vectorial,
0
E = +U r I+ ωj L I+ E0= +U r I+ ωj L+I
ou,
(
)
0
E = + +U r jX+ I (1.10)
11
3 2
X = ωL = ω⎛⎜ l + λ⎞⎟
⎝ ⎠
+ +
onde 3 11
2
X = ωL = ω⎛⎜ l + λ⎞⎟
⎝ ⎠
+ + (1.11)
Capitulo 1 – Breve Descrição da Máquina Síncrona Trifásica 12
A equação (1.10) pode traduzir-se pelo esquema da figura 1.13, onde é
a amplitude da f.e.m. induzida no estator .
0 R R1ma
E =I ωL x
X+
Fig. 1.13 – circuito equivalente da máquina síncrona
u Z L
ω + r
R
I
ω
~
R
Ψ
U
c
E
0
E
I
Quando a máquina está em carga, a f.e.m. existente na máquina não é E0mas sim Ec
f.e.m. em carga o fluxo resultante na máquina não é ΨR mas sim,
res R C
Ψ = Ψ + Ψ
em que Ψ =C l I+ é o fluxo de reacção do estator sobre o rotor, logo da figura 1.13,
c 0
E =E − ωj L+I (1.12)
ou ainda, pela tensão de saída,
(
)
0
U =E − +r jX+ I (1.13)
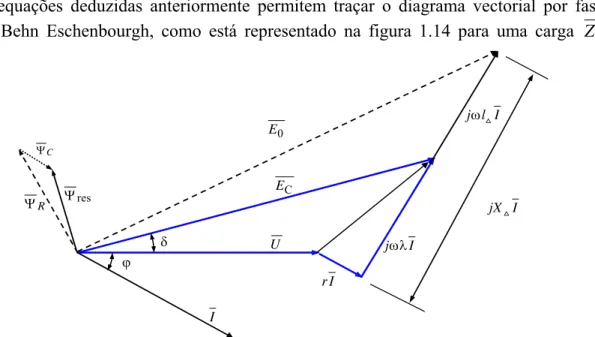
As equações deduzidas anteriormente permitem traçar o diagrama vectorial por fase,
devido a Behn Eschenbourgh, como está representado na figura 1.14 para uma carga Zu
indutiva.
Fig. 1.14 – Diagrama vectorial da máquina síncrona de rotor cilíndrico
ϕ
res
Ψ
C
Ψ
I
δ
R
Ψ
U
r I
C
E
0
E
jωλI
j l Iω+
jX I+
onde
ϕ - desfasagem
δ- ângulo de carga
X+- reactância síncrona
1.2.2 - Equação vectorial da Máquina Síncrona de Rotor de Pólos Salientes
Uma vez que a reactância do estator de uma máquina de pólos salientes varia com a
posição angular do rotor, Blondel resolveu o problema decompondo a reactância X
( )
β emduas componentes Xd segundo o eixo directo do rotor e segundo o eixo quadratura, de
acordo com a representação da figura 1.15. O mesmo acontece em relação à corrente I do
estator que se pode decompor em duas componentes
q X
d
I e Iq tal que I =Id+Iq.
Com esta decomposição a equação vectorial de máquina escreve-se,
E d d q
0 q
E = +U r I+ jX I + jX I (1.14)
cujo diagrama de Blondel está representado na figura 1.16. Em termos comparativos pode-se observar o diagrama de Behn-Eschenbourg representado na figura 1.15 com o de
Blondel onde no cilíndrico Xd =Xq e o de pólos salientes onde Xd >Xq.
Como o fluxo do rotor φr tem a direcção do eixo directo, a f.e.m. E0, está desfasada
dele de 90º em atraso e portanto situada no eixo quadratura.
Desprezando a resistência do estator em face das reactâncias, o diagrama pode
simplificar-se eliminando os vectores
E
r
E
r I, d
E
r I e r IE q.
I d I
d X
q
X
q
I
Capitulo 1 – Breve Descrição da Máquina Síncrona Trifásica 14
J.L.F. – Máquina Síncrona em Regime Transitório 2006
Assim a equação da máquina de pólos salientes em regime permanente, é
0 E d d q q d
E = +U r I+ jX I + jX I − jX I
ou ainda ,
(
)
0 E d d d q
E = +U r I+ jX I + j X −X Id (1.15)
1.2.3 – Variação da Reactância em Função da Posição do Rotor
Numa máquina síncrona de pólos salientes como ilustra a figura 1.17 a reactância dos
enrolamentos varia com a posição angular β do rotor.
q q jX I
(
d q)
dj X −X I
ϕ
I
δ
U
d d jX I
0
E
(d)
r
φ
q
jX I
q
E
r I
θ
d
I
q I
d
E
r I
E
r I
(q)
Fig. 1.16 – Diagrama de Blondel de rotor de pólos salientes
Fig. 1.17 – Rotor de pólos salientes
β
Eixo magnético do enrolamento
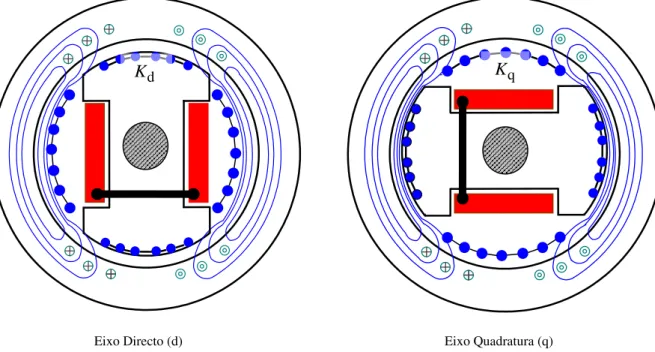
A figura 1.18 a) mostra o fluxo segundo o eixo directo e a figura 1.18 b) o andamento do fluxo segundo o eixo quadratura.
(d)
Permeância Máxima
(d)
Permeância Mínima
(q)
(q)
90º
Fig. 1.18 b) - Eixo quadratura ou transversal
q
X , com β =90º Fig. 1.18 a) – Eixo directo ou
longitudinal Xd, com β =0º
Como se pode observar destas figuras a permeância segundo o eixo directo é maior que a permeância segundo o eixo quadratura. Então os coeficientes de auto-indução são,
2
d d q
L =n P >L =n2P
q logo, Xd >Xq.
O andamento da reactância dos enrolamentos em função do ângulo β durante uma
rotação completa do rotor está representado na figura 1.19, que apresenta dois ciclos de rotação do rotor.
0 90º 180º 270º 360º β
Xd
Fig. 1.19 – Variação da reactância em função da posição do rotor numa máquina de pólos salientes
( )β
X
q
Capitulo 1 – Breve Descrição da Máquina Síncrona Trifásica 16
Define-se por coeficiente de saliência a seguinte relação,
q
d
X X
α =
que vale α <1 para um rotor de pólos salientes. O valor de α representa, o grau de saliência
do rotor, para α =1 é o caso da máquina de rotor cilíndrico.
1.2.4 - Ensaio de Escorregamento para Determinação de Xd e Xq
No caso de uma máquina síncrona trifásica, ao aplicar um sistema trifásico de tensões ao
estator cria-se um campo girante que roda à velocidade síncrona. Para determinar bastava
pôr o rotor a rodar (com a excitação desligada) por meio de uma máquina de accionamento à
mesma velocidade angular do campo girante e em fase com ele, como indica a figura
q X
ω 1.20 a).
Medindo a corrente e a tensão, a reactância do eixo directo, viria (desprezando a resistência).
d
min
U X
I
=
Para determinar , bastava colocar o eixo directo do rotor em quadratura com o campo
girante, como indica a figura 1.20 b). Desprezando a resistência a reactância quadratura viria q
X
q
max
U X
I
=
ω
Campo girante
Fig. 1.20 b) – Medição de X q Fig. 1.20 a) – Medição de Xd
max I min
I
ω
ω
U U
ω ω
Este ensaio é difícil, senão impossível de pôr em prática porque não se consegue colocar o rotor rigorosamente em tais condições exactas. Na prática, para contornar esta dificuldade, é usual fazer o chamado Ensaio de Escorregamento.
O ensaio de escorregamento consiste em aplicar ao estator, por intermédio de um autotransformador, um sistema trifásico simétrico de tensões reduzidas (na ordem de 20 a 30% da tensão nominal a fim de proteger os enrolamentos da máquina) e com o rotor em aberto colocá-lo a rodar com uma velocidade muito próxima da do campo girante do estator e no mesmo sentido.
O esquema de ligações para este ensaio está representado na figura 1.21.
Em seguida poder-se-ia medir a tensão aplicada e a corrente absorvida por meio de um osciloscópio de dois canais, cujos picos são modulados pela permeância do rotor.
Eventualmente pode também oscilografar-se a f.e.m. induzida no rotor devido à
diferença de velocidades do campo girante do estator e do rotor. O aspecto dos
referidos oscilogramas pode ser observado na figura 1.22.
r e r
ω− ω
Dos oscilogramas da tensão e da corrente vem,
max d
min U X
I
= q min
max
U X
I
=
Máquina de accionamento
Fig. 1.21 – Esquema de ligações do ensaio de escorregamento
r g±
ω = ω ∆ω
i
u
Saída da imagem da corrente para Osciloscópio Saída da tensão
para o Oscilocópio
Estator
Rotor
Capitulo 1 – Breve Descrição da Máquina Síncrona Trifásica 18
A ligeira flutuação na envolvente da tensão aplicada é devida à queda de tensão no auto-transformador motivada pela flutuação da corrente.
Tensão Simples u
f.e.m. induzida
r e
Eixo Directo Quadratura Directo Quadratura
0 π 2π
d X q
X
min
I Imax
min
U Umax
Corrente
na fase i
Fig. 1.22 – Oscilogramas típicos do ensaio de escorregamento
2.1 - Transformação do Sistema Trifásico em Sistema Bifásico
O presente capítulo tem por objectivo explicar a conversão do sistema trifásico num sistema bifásico, onde se irá basear todo o estudo de da máquina síncrona.
A transformação de Park é uma transformação de coordenadas que a partir dos três
enrolamentos a, b e c, desfasados de 120º e rodando com uma velocidade ω em relação ao
referencial (d, q) composto por dois enrolamentos pseudo-estacionários fazendo entre si um
ângulo de 90º como se pode observar na figura 2.1,
Fig. 2.1 - Transformação de Park
ω
(a)
(b) (c)
(q)
(p)
3 N 3
N
3 N
2 N
2 N
a u
a i
b u
b i
c u c
i
p
u
p
i
q
u
q
i
ω
Supondo que os três enrolamentos a, b e c, têm N/3 espiras por fase e os enrolamentos
peseudo-estacionários (d, q) têm N/2 espiras por fase, então temos as condições necessárias e
suficientes para relacionar os dois sistemas que permite considerá-los equivalentes.
De uma forma geral podemos assumir que as correntes ia,ib e constituem um sistema
trifásico assimétrico que pode ser decomposto em três sistemas, Directo, Inverso e Homopolar.
c
i
A componente homopolar significa que as correntes dos três enrolamentos estão em fase, sendo a sua equação,
(
)
0 a b c
3
i =1 i + +i i
Quando esta corrente percorre os três enrolamentos a, b e c, não produz nenhum campo
Capitulo 2 – Transformação de Park 20
A f.m.m. em cada um dos dois referenciais desta forma é dada por,
( )
( )
(
)
d a b c
q a b c
0 a b c
2 4
cos cos cos
2 3 3 3 3 3
2
sen sen sen
2 3 3 3 3 3
1 3
N N N N
i i i i
N N N N
i i i i
i i i i
⎛ ⎞ ⎛ ⎞ = + ⎜ − ⎟+ ⎜ − ⎟ ⎝ ⎠ ⎝ ⎠ ⎛ ⎞ ⎛ = + ⎜ − ⎟+ ⎜ − ⎝ ⎠ ⎝ ⎠ = + + 4 ⎞ ⎟ π π
θ θ θ
π π
θ θ θ (2.1)
Simplificando a equação (2.1) obtém-se ainda,
( )
( )
(
)
d a b c
q a b c
0 a b c
2 2
cos cos cos
3 3
2 2
sen sen sen
3 3
1 3
i i i i
i i i i
i i i i
⎛ ⎛ ⎞ ⎛ ⎞⎞ = ⎜ + ⎜ − ⎟+ ⎜ − ⎟⎟ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎛ ⎛ ⎞ ⎛ ⎞⎞ = ⎜ + ⎜ − ⎟+ ⎜ − ⎟⎟ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠ = + + 4 3 4 3 π π
θ θ θ
π π
θ θ θ
que se pode escrever na seguinte forma matricial,
(2.2) a b c i i i ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦
2 2 4
cos( ) cos( ) cos(
3 3 3
2 4
sen( ) sen( ) sen( )
3 3
1 1 1
2 2 2
⎡ − − ⎤ ⎢ ⎥ − − ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦
Considerando que se trata de um sistema trifásico equilibrado, a corrente homopolar é nula e por conseguinte,
(
)
03 1
c b a
0= i +i +i =
i
Assim, as equações relativas ao eixo directo e ao eixo quadratura podem-se representar na seguinte forma,
( )
d a b c
2 2
cos cos cos
3 3
i = ⎛⎜i +i ⎛⎜ − ⎞⎟+i ⎛⎜ − ⎞⎟
⎝ ⎠ ⎝ ⎠ ⎝ ⎠ 4 3 ⎞ ⎟ π π
θ θ θ (2.3)
⎢ ⎥
⎢ ⎥
π π
θ θ θ
π π
θ θ θ
d q 0 i i i ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎢ ⎥ ⎢ ⎥ d i =
( )
q a b c
2 2
sen sen sen
3 3
i = ⎛⎜i +i ⎜⎛ − ⎞⎟+i ⎛⎜ − ⎞⎟⎞⎟
⎝ ⎠ ⎝ ⎠
⎝ ⎠
4 3
π π
θ θ θ (2.4)
Multiplicando (2.3) e (2.4) respectivamente por cos
( )
θ e sen( )
θ , fica( )
2( )
( )
( )
d a b c
2 2
cos cos cos cos cos cos
3 3
i = ⎛⎜i +i ⎛⎜ − ⎞⎟+i ⎛⎜ − ⎞⎟
⎝ ⎠ ⎝ ⎠ ⎝ ⎠ 4 3 ⎞ ⎟ π π
θ θ θ θ θ θ (2.5)
( )
2( )
( )
( )
q a b c
2 2
sen sen sen sen sen sen
3 3
i = ⎛⎜i +i ⎛⎜ − ⎞⎟+i ⎛⎜ − ⎞⎟
⎝ ⎠ ⎝ ⎠ ⎝ ⎠ 4 3 ⎞ ⎟ π π
θ θ θ θ θ θ (2.6)
Somado (2.5) com (2.6) resulta,
a dcos( ) qsen( )
i =i θ +i θ (2.7)
Esta relação só é válida quando a corrente homopolar é nula (caso do presente estudo)
O sistema trifásico pode ser representado, pelas três fases ia, ib e ic, forma,
( )
( )
a d q c
b d q
c d q
cos s e n
2 4
cos s e n
3 3
2 4
cos s e n
3 3
i i i i
i i i i
i i i i
= + + ⎛ ⎞ ⎛ ⎞ = ⎜ − ⎟+ ⎜ − ⎟ ⎝ ⎠ ⎝ ⎠ ⎛ ⎞ ⎛ ⎞ = ⎜ − ⎟+ ⎜ − ⎟ ⎝ ⎠ ⎝ ⎠ θ θ
θ π θ π
θ π θ π
c
c
+
+
(2.8)
Do mesmo modo pela forma matricial é possível representar o sistema de equações em
ordem às três fases a, b e c,
0
cos( ) sen( ) 1
2 4
cos sen 1
3 3
2 4
cos sen 1
3 3 a d b c i i i i i i
⎡ ⎤ ⎡ θ θ ⎤ ⎡
⎢ ⎥ ⎢ ⎥ ⎢
⎢ ⎥ ⎢ ⎥ ⎢
⎢ ⎥ ⎢ ⎛ π⎞ ⎛ π⎞ ⎥ ⎢
θ − θ −
⎢ ⎥=⎢ ⎜⎝ ⎟⎠ ⎜⎝ ⎟⎠ ⎢ ⎢ ⎥ ⎢ ⎢ ⎢ ⎥ ⎢ ⎥ ⎢ ⎢ ⎥ ⎢ ⎥ ⎢ π π ⎛ ⎞ ⎛ ⎞
⎢ ⎥ ⎢ θ − θ − ⎥ ⎢
Capitulo 2 – Transformação de Park 22
De forma semelhante para as equações das tensões,
d d
q q
0 0
2 4
2
cos( ) cos cos
3 3
3
2 4
sen( ) sen sen
3 3
1 1 1
2 2 2
e e
e e
e e
⎡ ⎤ ⎡ ⎛ − π⎞ ⎛ − π⎞⎤ ⎡ ⎤
⎜ ⎟ ⎜ ⎟
⎢ ⎥ ⎢ ⎝ ⎠ ⎝ ⎠⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥ ⎢ ⎥
⎢ ⎥= ⎢ ⎛ − π⎞ ⎛ − π⎞⎥⋅ ⎢⎢ ⎥
⎥
⎢ ⎜⎝ ⎟⎠ ⎜⎝ ⎟⎥
⎠ ⎢ ⎥
⎢ ⎥
⎢ ⎥ ⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥ ⎢ ⎥
⎣ ⎦
⎣ ⎦ ⎣ ⎦
θ θ θ
θ θ θ
(2.10)
⎢ ⎥
⎢ ⎥
(2.17)
a d
b q
c 0
cos(θ) sen(θ) 1
2π 4π
cos θ- sen θ- 1
3 3
2π 4π
cos θ- sen θ- 1
3 3
e e
e e
e e
⎡ ⎤ ⎡ ⎤ ⎡ ⎤
⎢ ⎥
⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎛ ⎞ ⎛ ⎞ ⎥ ⎢ ⎥
= ⋅
⎢ ⎥ ⎢ ⎜⎝ ⎟⎠ ⎜⎝ ⎟⎠ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎛ ⎞ ⎛ ⎞ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎜ ⎟ ⎜ ⎟ ⎥ ⎢ ⎥
⎝ ⎠ ⎝ ⎠
⎣ ⎦
⎣ ⎦ ⎣ ⎦
= =
Esta conversão de eixos de trifásico em bifásico, é fundamental para o estudo da máquina síncrona em regime transitório.
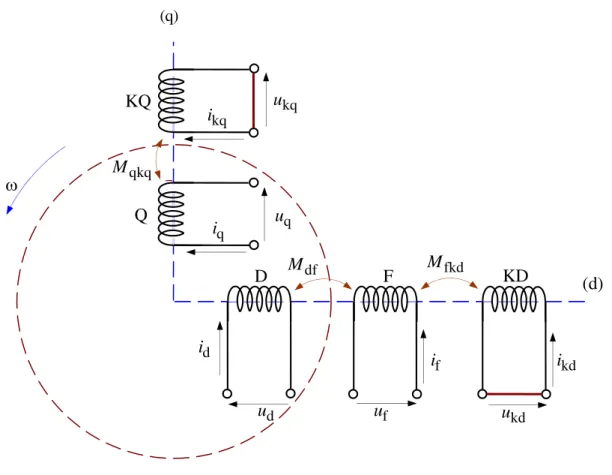
3.1 – Modelo da Máquina Síncrona de Pólos Salientes
Com base na transformação de Park apresentada no capítulo anterior, vão ser deduzidas as equações da máquina síncrona de pólos salientes com enrolamentos amortecedores em regime transitório.
A máquina síncrona generalizada é representada na figura 3.1.
ω
(q)
(d)
kd i
kd u f
i
f u d
i
d u
KD KQ
Q
D Mdf F Mfkd
q
i uq
qkq
M
kq
i ukq
Fig. 3.1. Máquina Síncrona de pólos salientes representada em dois eixos
Desta resulta que se podem extrair as figuras 3.2 e 3.3, que representam respectivamente os circuitos equivalentes do eixo directo e eixo em quadratura. Estas representações esquemáticas reflectem os modelos matemáticos da máquina síncrona, para o eixo directo e em quadratura.
Fig. 3.2 - Circuito equivalente do eixo directo Fig. 3.3- Circuito equivalente do eixo em quadratura a
sl
q
i
kq q
i +i sLmq
q
sΨ
kq
i
kq
r
kq
sl
d
sΨ
a
sl
d
i
d kd f
i +i +i sLmd
kd
i if
kd
sl slf
f
v
kd
r rf
f
Capítulo 3 – Equações Gerais da Máquina Síncrona 24
A partir dos esquemas equivalentes do eixo directo e quadratura respectivamente representados pelas figuras (3.2) e (3.3), passa-se à construção do modelo matemático da máquina.
Tendo em consideração as indutâncias dos enrolamentos podem-se decompor em,
d md a
f md f
kd md kd
q mq kq
kq mq kq
L L l
L L l
L L l
L L l
L L l
= +
= +
= +
= +
= +
(3.1)
A partir das enrolamentos da máquina síncrona pode escrever-se o seguinte sistema de equações:
• Para o eixo directo
(
)
(
)
( )
(
)
f f md f f md kd md d
kd md f kd md kd kd md d
md f md kd md a d
d 0
u r L l s i L s i L s i
u L s i r L l s i L s
s L i L i L l i
⎡ ⎤
=⎣ + + ⎦ + +
⎡ ⎤
= = +⎣ + + ⎦ +
ψ = + + +
i
i
(3.2)
• Para o eixo quadratura
(
)
( )
(
)
kd kq mq kq kq md q
mq f mq kq mq a q
q 0
s
u r L l s i L s
L i L i L l i
⎡ ⎤
= =⎣ + + ⎦ +
ψ = + + +
Resolvendo o sistema de equações do eixo Directo em ordem Id( )s , vem
(3.3)
f md f md f
md kd md kd
md md d
d
f md f md md
md kd md kd md
md md md a
( ) ( )
( ) 0
( ) ( )
( )
( )
r L l s L s u s
L s r L l s
L L s
A i s
r L l s L s L s B
L s r L l s L s
L L L l
+ +
+ +
Ψ
= =
+ +
+ +
+
f md f md f
md kd md kd
md md d
( ) ( )
( ) 0
( )
r L l s L s u s
L s r L l s
L L s
+ +
+ +
Ψ
O resultado do determinante A do numerador, vale
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
2
f f md f md md
d kd d d kd d kd d kd
2 2
md md md
f f f
d kd d d kd f kd f kd
s s s s s
s s s s s
A r r r L s r l s L r s L l s
r s s l s v r v r s
l l L l L L
= Ψ + Ψ + Ψ + Ψ + Ψ +
+Ψ + Ψ + Ψ − − (3.4)
Factorizando, obtém-se a equação do determinante A (3.4) simplificada,
( )
[
(
(
)
)
(
(
)
) (
) ( )
]
( )(
s[
L)
s L(
r(
L l)
s)
]
v s L s l L r s l L r A kd md kd md 2 md f 2 2 md kd md kf f md
d s f
+ + − + + − + + + + Ψ
= (3.5)
Voltando a factorizar por forma que a expressão fique do tipo τ= L/R ou seja em ordem à
constante de tempo do enrolamento,resulta
( )
( )
2
md f md kd md kd md f f kd
f ld d
f kd f kd
md kd f
1
1 kd kd
L l L l L l L l l l
A r r s s s
r r r r
l s
L r u s
r
⎡ ⎛ + + ⎞ ⎛ + + ⎞ ⎤
= ⎢ +⎜ + ⎟ +⎜ ⎟ ⎥ψ
⎢ ⎝ ⎠ ⎝ ⎠ ⎥ ⎣ ⎦ ⎛ ⎞ + ⎜ + ⎟ ⎝ ⎠ + (3.6)
Assim sob esta estrutura podem determinar-se algumas das seguintes constantes de tempo fundamentais:
• Constante de tempo transitória do enrolamento do eixo directo em circuito aberto,
(
md ff f f md ' d0
1 1 X X
r r l L T T + ω = + =
=
)
(3.7)• Constante de tempo transitória do enrolamento do eixo em quadratura em circuito
aberto,
(
md kdkd kd kd md ' q0
2 1 X X
r r l L T T + ω = + =
=
)
(3.8)• Constante de tempo subtransitória do enrolamento do eixo directo em circuito aberto,
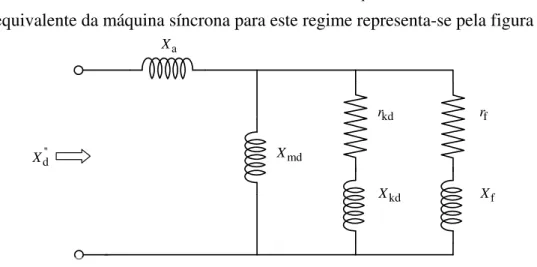
⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + + ω = ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + + = = f md f md kd kd f md f md kd kd '' d0
3 1 1
X X X X X r L L l L l r T
Capítulo 3 – Equações Gerais da Máquina Síncrona 26
• Constante de tempo do enrolamento do eixo amortecedor eixo directo, em circuito
aberto, kd kd kd kd kd r X r l T ω =
= (3.10)
Substituindo as constantes de tempo em (3.6), obtém-se,
(
T T)
s TT s( )
s L r(
T s)
v s rr
A f ld 1 1 2 1 3 2 Ψd − md kd 1+ kd f
⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ + + +
=
( )
(3.11)ou ainda, 2 a kd f 2 md kd f 2 a md f a kd f md kd f 2 a kd md a kd md a kd f md kd f a md f a kd f md kd f s l l l s L l l s l L l s l r l s L r l s l l L s l r L s l l r s L l r s l L r l r r L r r A + + + + + + + + + + + + =
Relativamente ao determinante B, vem
(
)
[
(
)
]
[
(
)
]
[
L r L L l s L s]
L s[
L s L r L(
L l)
s]
s L s L s l L r s l L r l L B kd md md kd md 2 md md 2 md f md md f md md 2 2 kd md kd f md f a md ) ( md + − − + − + + − − − ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ + + + + + = (3.12) ou ainda, 2
md kd md f md f md kd f kd
f kd d md a
kd f f kd
2 2 2 2
2
md md md f md kd
kd f f kd f kd
1 L l L l L l L l l l
B r r L L l s s
r r r r
L L L l L l
s s
r r r r r r
⎡ ⎡ ⎛ + + ⎞ + + ⎤ ⎤ = ⎢ + ⎢ +⎜ + ⎟ + ⎥ ⎥ ⎢ ⎥ ⎢ ⎣ ⎝ ⎠ ⎦ ⎥ ⎣ ⎦ ⎡ ⎤ ⎡ ⎤ −⎢ + ⎥ −⎢ + ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎣ ⎦ − a (3.13) Simplificando (3.13) com a substituição de Ld =Lmd+l , obtém-se,
(
)
(
)
md f md a f a md kd md a kd a
f kd d
f md a kd md a
md f md a f a md f a md f kd md a kd f a kd
f kd d
f md a kd md f md a f a
1 1
1 L l L l l l L l L l l l
B r r L s
r L l r L l
L l L l l l L l l L l l L l l l l l
r r L
r L l r L l L l l l
⎡ ⎛ + + + + ⎞ ⎤ = ⎢ +⎜ + ⎟ ⎥ + + ⎢ ⎝ ⎠ ⎥ ⎣ ⎦ + + + + + + + + + + (3.14)
Como X=ω.L, as constantes de tempo resumem-se às seguintes expressões,
• Constante de tempo transitória do enrolamento do eixo directo em curto circuito,
⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + + ω = + = ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + + + = = a md a md a md a md f a md a f a md f mf f f '
4 1 1 1 1
X X X X Xf rf l L l L r l L l l l L l L r r T
T d (3.15)
⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + + ω = ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + = + + + = a md a md k kd a md a md kd kd a md a kd a md kd mf kd
5 1 1 1
X X X X X r l L l L l r l L l l l L l L r
T d (3.16)
• Constante de tempo subtransitória do enrolamento do eixo directo em curto circuito
⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + + + ω ω = = a f a md f md a f md kd kd ''
6 1 1
X X X X X X X X X r r T
T d (3.17)
Logo, (3.14), escreve-se
(
)
2f kd d 1 4 5 4 6
B=r r L ⎡⎣ + T +T s T T s+ ⎤⎦ (3.18)
Portanto atendendo a (3.11) e (3.18), a equação (3.3) escreve-se
(
)
(
)
( )
(
)
2
f ld 1 2 1 3 d md kd kd f
d 2
f kd d 4 5 4 6
1 ( ) 1
1
r r T T s T T s s L r T s u s
A i
B r r L T T s T T s
⎡ + + + ⎤Ψ − +
⎣ ⎦
= =
⎡ + + + ⎤
⎣ ⎦
(3.19)
Resolvendo (3.19) em ordem a Ψd(s), fica
( )
(
)
(
)
( )
(
)
2
4 5 4 6 kd md f
d 2 d d 2
f
1 2 1 3
1 2 1 3
1 1 (
1 1
T T s T T s T s L u s
s L i s
r T T s T T s
T T s T T s
⎡ + + + ⎤ ⎡ + ⎤
⎢ ⎥ ⎢ ⎥
Ψ = +
⎢ + + + ⎥ ⎢⎣ + + + ⎥⎦
⎣ ⎦
)
(3.20)
Após simplificação, (3.20) pode ainda escrever-se
( )
d s 1 Xd( ) ( )s id s 1G s u( ) ( )
Ψ = +
ω ω f s (3.21)
onde,
2
4 5 4 6
d 2
1 2 1 3
1 ( )
( )
1 ( )
T T s T T s
d
X s
T T s T T s
+ + +
=
Capítulo 3 – Equações Gerais da Máquina Síncrona 28
kd md
2 f
1 2 1 3
1 ( )
1 ( )
T s X
G s
r
T T s T T s
+ =
+ + + (3.23)
Resolvendo o sistema de equações do eixo Directo em ordemi sq( ), vem,
(3.24)
kd ( mq kq)
mq q
q
kd ( mq kq) mq
mq mq a
0
( ) ( )
L l s
L l s
r
L s C
s
r L s D
L L l
+ +
+ +
Ψ
= =
+
kd ( mq kq)
mq q
0
( )
L l s
r
L s
+ +
Ψ
q( )
i s
onde o determinante do numerador,
(
)
[
rkq Lmq lkq s q(s)C = + +
]
Ψ (3.25)Por outro lado, o determinante do denominador,
kq mq kq a mq a kq mq kq a
D=r L +r l +L l s l+ L s l l s+ (3.26)
Factorizando (3.26), fica
kq( mq a) ( mq a mq kq kq a)
D=r L +l + L l +L l +l l s (3.27)
de modo que a corrente do eixo em quadratura iq( )s , escreve-se
(
kq)
mq kq qq
kq mq a mq a mq kq kq a
( ) ( )
( )
( )
r L l s s
C i s
D r L l L l L l l l s
⎡ + + ⎤Ψ
⎣ ⎦
= =
+ + + + (3.28)
donde,
(
) (
)
(
)
kq mq a mq a mq kq kq a
( ) ( )
q q
kq mq kq
r L l L l L l l l s
s i s
r L l s
⎡ + + + + ⎤
⎣ ⎦
Ψ =
⎡ + ⎤
⎣ ⎦
que ainda se pode escrever na forma
mq a kq
kq mq a
q q
kq mq
kq 1 1
( ) ( )
1
1 ( ) q
L l l
r L l
s L i s
l L s
r
⎛ ⎞
+ ⎜⎜ + ⎟⎟
+ ⎝
Ψ =
+ +
⎠ (3.29)
Assim será,
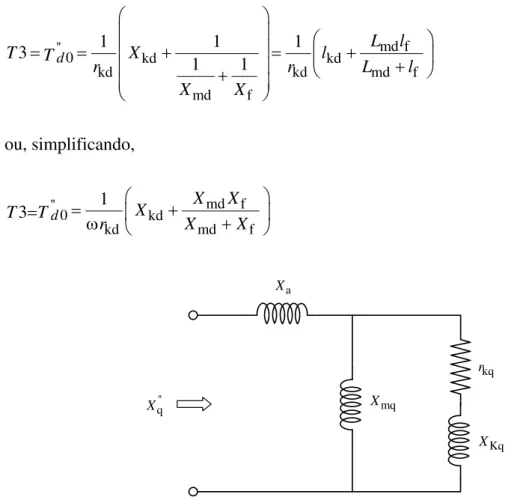
• Constante de tempo subtransitória do enrolamento do eixo quadratura em curto
circuito,
mq a mq a
''
kq kq
kq mq a kq mq a
1 1
q
L l X X
l X
T
r L l r X
⎛ ⎞ ⎛
= ⎜⎜ + ⎟⎟= ⎜⎜ +
+ ω +
⎝ ⎠ ⎝ X
⎞ ⎟⎟
⎠ (3.30) • Constante de tempo subtransitória do enrolamento do eixo quadratura em circuito
aberto,
(
)
(
''
0 kq mq kq mq
kq kq
1 1
q l L X X
T
r r
= + = +
ω
)
(3.31)Substituindo (3.30) e (3.31), em q '''' 0 1
( ) ( )
1
q
q T
s L
T
+
Ψ =
+ q qi s (3.32)
obtém-se,
q( )s 1 Xq( ) ( )s i
Ψ =
ω q s (3.33)
onde,
''
q ''
0 1 ( )
1
q
q s T
q
X s
s T
+ =
+ X (3.33)
Capítulo 4 – Constantes da Máquina Síncrona 30
Constantes da Máquina Síncrona
Capítulo 4
4.1 – Significado Físico dos Parâmetros da Máquina Síncrona.
Os parâmetros das máquinas que são fornecidos pelos construtores, são em regra geral as reactâncias, resistências e constantes de tempo que normalmente derivam de medidas feitas ao enrolamento do estator. O método mais comum para extrair os parâmetros necessários da máquina, com um grau de confiança elevado é através dos oscilogramas de curto-circuito das correntes do estator. Este obtém-se quando se aplica um curto-circuito simétrico ao estator quando este está previamente em vazio e com a corrente de excitação e campo constante.
Em torno da envolvente de corrente contínua, uma porção do curto-circuito tipicamente é representado por dois períodos de amortecimento distintos. Estes denominam-se por período sub-transitório e transitório.
O período sub-transitório refere-se aos primeiros ciclos do curto-circuito, quando a corrente se amortece muito rapidamente, atribuído essencialmente a variações de corrente nos enrolamentos amortecedores. A taxa de amortecimento de corrente no período transitório é mais lenta e é atribuída a variações das correntes dos enrolamentos de campo do rotor.
O teorema do fluxo constante é importante para determinar os valores iniciais dos fluxos transitórios induzidos nos circuitos acoplados. A ligação de fluxos de qualquer circuito indutivo com uma resistência finita e uma f.e.m. não pode variar instantaneamente. De facto, se não houver resistência ou f.e.m. no circuito, esse fluxo de ligação permaneceria constante. O teorema dos fluxos de ligação da constante pode assim ser usado para determinar as correntes imediatamente depois de uma variação nos seus termos.
Através das figuras que se seguem, é possível observar as distribuições de fluxo numa máquina síncrona durante o período sub-transitório, transitório e permanente, depois de uma perturbação no estator.
Assim durante o período vigência destes regimes, o comportamento da máquina passa a ser descrito em pormenor.
4.1.1 -Período Subtransitório
Significado físico das reactâncias subtransitórias Xd'' e Xq''
Neste período o enrolamento amortecedor provoca um escudo à penetração do fluxo do estator. Então as reactâncias Xd'' e do período subtransitório tornam-se mais pequenas do que as reactâncias relativas ao caso do fluxo penetrar no rotor.
'' q
X
O comportamento do curto-circuito no estator com excitação no rotor durante o período transitório, é equivalente a fazer um curto-circuito no rotor quando se aplica uma tensão externa no estator. Esta equivalência está representada esquematicamente na figura (4.1).
f
i