Caracterização do comportamento
mecânico do tecido ósseo cortical através
de ensaios de flexão
Dissertação de Mestrado em Engenharia Mecânica
André Filipe Branco Rodrigues
José Joaquim Lopes Morais
Nuno Miguel Magalhães Dourado
Escola de Ciências e Tecnologia
Caracterização do comportamento
mecânico do tecido ósseo cortical através
de ensaios de flexão
André Filipe Branco Rodrigues
José Joaquim Lopes Morais, Professor Catedrático
Nuno Miguel Magalhães Dourado, Professor Auxiliar
Dissertação de Mestrado apresentada à Universidade de Trás-os-Montes e Alto Douro para obtenção do grau de Mestre em Engenharia Mecânica.
Não apenas planear, mas também acreditar..."
Anatole France
Agradecimentos
Agradeço ao Professor Catedrático José Joaquim Lopes Morais por ter aceite orientar a minha Dissertação de Mestrado e por toda a disponibilidade, dedicação e apoio que me prestou na realização deste trabalho. Ao Professor Doutor Nuno Dourado agradeço a disponibilidade, preocupação e amizade ao longo deste tempo. Ao Professor Doutor José Xavier agradeço pela paciência, pela disponibilidade e pelo tempo dispensado.
Agradeço aos meus pais por me terem proporcionado todo este processo formativo, pela paciência e pelo esforço ao longo de todos estes anos. Aos meus irmãos agradeço as palavras de alento que sempre tiveram ao longo deste tempo.
À minha namorada agradeço por todo o apoio e incentivo que me possibilitou não só a concretização desta Dissertação de Mestrado mas, também, todo o meu percurso formativo. Um obrigado especial por nunca ter desistido de mim.
Aos pais da minha namorada agradeço pela amizade, pelo carinho e pelo apoio dado ao longo de todos estes anos.
Agradeço ao Doutor Fábio Pereira pelo constante acompanhamento neste trabalho e a total disponibilidade para me ajudar. Ao Doutor Cristóvão Santos agradeço por toda a ajuda e recetividade no trabalho prático nas Oficinas.
À Doutora Fernanda Natália agradeço pela ajuda e pela amizade demonstradas nestes anos de formação académica.
A todos os meus familiares e amigos agradeço por me terem acompanhado e incentivado de uma ou de outra forma neste percurso.
Sem o contributo de todos não era possível a realização deste trabalho.
“Obrigado a todas as pessoas que contribuíram para o meu sucesso e para o meu crescimento como pessoa. Sou o resultado da confiança e da força de cada um de vocês…”
Resumo
O tecido ósseo cortical é um material vivo, heterogéneo e anisotrópico, fazendo com que a determinação das suas propriedades mecânicas seja uma tarefa complexa. Essa dificuldade faz-se também sentir na própria execução dos ensaios, em virtude das pequenas dimensões dos provetes que é possível obter. Esta dissertação tem como objetivo genérico contribuir para o desenvolvimento de métodos de ensaio in vitro que permita a medição correta das propriedades elásticas do tecido ósseo cortical. Trata-se de um objetivo relevante para a medicina humana, face ao crescente envelhecimento da população. Porém, é uma questão que ainda está por resolver de forma satisfatória.
O trabalho efetuado incidiu sobre o tecido ósseo cortical extraído da diáfise femoral de bovinos jovens, com cerca de oito meses de idade. Este foi submetido a ensaios de flexão em três e quatro pontos, no plano LT (L é a direção longitudinal da diáfise e T é a direção tangencial). Foi também analisado o ensaio de tracção, como ensaio de referência para a identificação do módulo de elasticidade longitudinal (EL). Estes ensaios
foram simulados recorrendo ao método dos elementos finitos. A simulação numérica foi limitada ao domínio elástico, tendo como objetivo analisar a sua sensibilidade ao ângulo off-axis (isto é, ao ângulo entre as direções de simetria material e as direções de simetria geométrica dos provetes, no plano do ensaio). Nos ensaios experimentais foi utilizada a técnica da correlação digital de imagem (CDI), para medição dos campos dos deslocamentos e dos campos das deformações.
Em concreto, o trabalho que foi realizado teve em vista examinar vários aspetos dos ensaios de flexão: (1) a influência da anisotropia do plano de flexão (plano LT); (2) a possibilidade de identificar em simultâneo o módulo de elasticidade EL e o módulo de
corte GLT, aplicando o método do vão variável (ensaio de flexão em três pontos); (3) a
eventual diferença entre o módulo de elasticidade longitudinal em tracção e em compressão. Os resultados obtidos revelaram que o plano LT é um plano quase-isotrópico e que o ensaio de flexão em três pontos é adequado para a identificação do módulo de elasticidade longitudinal, o mesmo não sendo verdade para o ensaio de flexão em quatro pontos. Além disso, os resultados sugerem que o módulo de elasticidade em tracção é igual ao módulo de elasticidade em compressão.
Abstract
The cortical bone tissue is a heterogeneous and anisotropic living material, which makes the evaluation of its mechanical properties a very difficult task. The small dimensions of specimens also enhance the difficulty of mechanical testing of cortical bone tissue. The general goal of this thesis is to contribute for the development of in vitro testing methods which allow the correct identification of elastic properties of cortical bone. This is a relevant goal in the context of human medicine, in view of the growing aged population. However, this issue is far from being solved satisfactorily.
The work performed was focused on cortical bone tissue excised from the femoral diaphysis of young bovines (around eight months old) and on the three and four point bending tests, in the LT plane (L is the diaphysis longitudinal direction and T is the tangential direction). The tensile test was also examined, as a reference testing method for the identification of longitudinal modulus of elasticity (EL). All test methods were
simulated using the finite element method. The numerical simulations were confined to the linear material behaviour, with the objective to evaluate their sensibilities to the off-axis loading. The digital correlation technique was applies in the experimental tests in order to measure the displacement and strain fields.
More precisely, the work performed addressed some issues related with the bending tests: (1) the effect of testing plane (LT plane) anisotropy; (2) the possibility of simultaneous identification of EL and GLT(the shear modulus in the LT plane) by using
the variable span method (three point bending tests); (3) the eventual differences between the longitudinal elastic modulus under tension and compression loading. The results obtained showed that the LT plane is a quasi-isotropic mechanical plane and that the three point bending test is suitable for measuring EL, although the same is not true for the four
point bending test. Moreover, the results suggest that the tensile longitudinal elastic modulus of cortical bone is equal to the compressive one.
Índice
Agradecimentos... i Resumo... ii Abstract... iii Nomenclatura ...x Introdução...1Capítulo 1 – Revisão bibliográfica ...3
1.1 – Introdução ...3
1.2 – Estrutura e composição do tecido ósseo ...3
1.3 – Elasticidade anisotrópica ...6
1.4 – Fatores que influenciam as propriedades elásticas do tecido ósseo...8
Capítulo 2 – Ensaio de tracção ...11
2.1 – Introdução ...11
2.2 – Trabalho experimental ...11
2.3 – Análise por elementos finitos do ensaio de tracção...17
2.4 – Análise e discussão dos resultados experimentais...21
2.5 – Conclusões...28
Capítulo 3 – Ensaio de flexão em três pontos ...29
3.1 – Introdução ...29
3.2 – Trabalho experimental ...29
3.3 – Análise por elementos finitos ...31
3.4 – Análise e discussão dos resultados experimentais...34
3.5 – Conclusões...50
Capítulo 4 – Ensaio de flexão em quatro pontos...51
4.1 – Introdução ...51
4.2 – Trabalho experimental ...51
4.3 – Análise por elementos finitos ...53
4.4 – Análise e discussão dos resultados experimentais...55
4.5 – Conclusões...65
Capítulo 5 – Conclusões...67
Índice de figuras
Figura 1.1 – Estrutura dos ossos longos (Dias et al., 2005). ...4
Figura 1.2 – Tecido ósseo cortical e esponjoso (Judas et al., 2012)...5
Figura 1.3 – Organização estrutural do tecido ósseo (adaptado de Rho et al., 1998). ...6
Figura 1.4 – Morfologia do osso cortical ilustrando as direções de simetria material (Dias et al., 2005)...7
Figura 1.5 – Orientações das amostras de tecido ósseo de equinos para ensaios de flexão em quatro pontos (adaptado de Barak et al., 2008). ...9
Figura 2.1 – Secção medial da diáfise femoral de um bovino jovem...12
Figura 2.2 – Engenho de furar...12
Figura 2.3 – Detalhe da operação de fresagem da amostra. ...13
Figura 2.4 – Corte das extremidades da amostra...13
Figura 2.5 – Acondicionamento da amostra após a primeira etapa do processo de fabrico. ...14
Figura 2.6 – Segunda etapa do processo de fabrico dos provetes: corte de dois provetes na direção longitudinal da diáfise...14
Figura 2.7 – Provete do ensaio de tracção...15
Figura 2.8 – Ensaio de tracção. ...16
Figura 2.9 – Padrão utilizado na técnica da correlação digital de imagem. ...16
Figura 2.10 – Modelo de elementos finitos do ensaio de tracção. ...17
Figura 2.11 – Campos das deformações, para 0º: (a)
xx; (b)
yy; (c)
xy...18Figura 2.12 – Campos das deformações, para 30º: (a)
xx; (b)
yy; (c)
xy...19Figura 2.13 – Distribuição das deformações no segmento de reta y=0 da zona de interesse da correlação digital de imagem, para 30º: (a)
xx; (b)
yy(simulação numérica)..20Figura 2.14 – Variação do módulo de elasticidade (E ) com a orientação do provete (x )...21
Figura 2.15 – Curvas força-deslocamento dos ensaios de tracção. ...22
Figura 2.16 – Distribuição do módulo de elasticidade aparente (E ) dos provetes dea ensaio de tracção pelo método força-deslocamento. ...22
Figura 2.17 – (a) Campo das deformações
xx; (b) Campo das deformações
yy; (c)Campo das deformações
xypelo método da CDI para o provete 1a (F = 243 N)...24Figura 2.18 – Ensaio de tracção: curva tensão-deformação (a) e curva deformação transversal-deformação axial (b) do provete 1a. ...25 Figura 2.19 – Distribuição do módulo de elasticidade longitudinal (EL) dos provetes de
ensaio de tracção pelo método da CDI...27 Figura 2.20 – Distribuição do coeficiente de Poisson LT dos provetes dos ensaios de
tracção...27 Figura 3.1 – (a) Provete para o ensaio de flexão em três pontos; (b) zona de interesse da CDI (dimensões em mm)...30 Figura 3.2 – Aspeto geral do ensaio de flexão em três pontos...31 Figura 3.3 – Modelo de elementos finitos do ensaio de flexão em três pontos...32 Figura 3.4 – Campo das deformações no ensaio de flexão em três pontos para 0º: (a)
xx
; (b) ; (c)yy . ...33xy
Figura 3.5 – Campo das deformações no ensaio de flexão em três pontos para 30º: (a)
xx
; (b) ; (c)yy . ...33xy
Figura 3.6 – Curvas força-deslocamento características, para os diferentes valores do vão (L1=21mm, L2=24.9mm, L3=32.4mm e L4=58mm). ...34
Figura 3.7 – Variação do módulo de elasticidade aparente ( a L
E ) com a distância entre apoios...35 Figura 3.8 – Comparação das linhas características do provete 1b (J=1,2 e J=1,5). ...36 Figura 3.9 – Comparação entre o módulo de elasticidade longitudinal obtido pela teoria de vigas de Timoshenko pela teoria de vigas de Bernoulli-Euler (L4=58mm)...38
Figura 3.10 – Curvas força-deslocamento do atuador, obtidas nos ensaios de flexão em três pontos (L4=58mm)...39
Figura 3.11 – Comparação entre a rigidez determinada pelo método da correlação digital de imagem (CDI) e a rigidez baseada no deslocamento do atuador (força-deslocamento), para o vão máximo (L4=58mm)...39
Figura 3.12 – Representação esquemática do deslocamento devido à indentação ( ,i1 e 2
,i
Figura 3.13 – Deslocamento uy ao longo da linha CC da zona de interesse (Figura 3.1a),
medido por correlação digital de imagem. ...40 Figura 3.14 – Comparação entre o módulo de elasticidade longitudinal baseado no deslocamento do atuador e o módulo baseado no deslocamento do ponto central da zona de interesse da correlação digital de imagem. ...42 Figura 3.15 – Variação do módulo de elasticidade aparente pelo método da CDI para os ensaios de tracção e para os ensaios de flexão em três pontos (L4=58mm). ...42
Figura 3.16 – Campos das deformações obtidos pelo método da correlação digital de imagem (provete 2b e F = 349 N): (a) xx; (b)
yy; (c)
xy...44Figura 3.17 – Distribuição das deformações xxna região de interesse (Figura 3.1b) do
provete 2b: (a) linha EE; (b) linha CC; (c) linha DD. ...46 Figura 3.18 – (a) Distribuição das deformações xx ao longo da linha CC (Figura 3.1b),
obtida por simulação numérica e pelo método da correlação digital de imagem; (b) variação da posição do eixo neutro durante um ensaio; (c) curvas tensão-deformação, em tracção e em compressão...47 Figura 3.19 – Posição do eixo neutro no ensaio de flexão em três pontos...48 Figura 4.1 – Ensaio de flexão em quatro pontos: (a) esquema do ensaio e dimensões nominais do provete; (b) zona de interesse da correlação digital de imagem. ...52 Figura 4.2 – Aspeto geral da montagem experimental dos ensaios de flexão em quatro pontos. ...52 Figura 4.3 – Modelo de elementos finitos do ensaio de flexão em quatro pontos. ...54 Figura 4.4 – Campo das deformações no ensaio de flexão em quatro pontos, para 0º:
(a) xx; (b) ; (c)yy ...54xy
Figura 4.5 – Campo das deformações no ensaio de flexão em quatro pontos, para 30º
: (a) xx; (b) ; (c)yy ...55xy
Figura 4.6 – Curvas força-deslocamento do atuador dos ensaios de flexão em quatro pontos. ...56 Figura 4.7 – Comparação entre a rigidez inicial dos provetes dos ensaios de flexão em quatro pontos obtida a partir do deslocamento do atuador (Força-deslocamento) e a partir do deslocamento do ponto central da região de interesse, medido por correlação digital de imagem. ...56
Figura 4.8 – (a) Deslocamento segundo y ao longo da linha EE; (b) Deslocamento segundo y ao longo da linha CC do provete 2a (CDI). ...57 Figura 4.9 – Comparação entre o módulo de elasticidade longitudinal obtido correlação digital de imagem e o módulo obtido pela curva força-deslocamento do atuador, nos ensaios de flexão em quatro pontos...59 Figura 4.10 – Comparação entre o módulo de elasticidade longitudinal aparente obtido no ensaio de flexão em quatro pontos (com o deslocamento medido por correlação digital de imagem) e o módulo de elasticidade longitudinal obtido através do ensaio de tracção. ...59 Figura 4.11 – Campos das deformações obtidos pelo método da correlação digital de imagem (provete 2a e F = 396 N): (a) xx; (b)
yy; (c)
xy...60Figura 4.12 - Distribuição das deformações xxna região de interesse (Figura 4.1b) do
provete 2a: (a) linha EE; (b) linha CC; (c) linha DD. ...61 Figura 4.13 – (a) Distribuição das deformações xx ao longo da linha CC (Figura 4.1b),
obtida por simulação numérica e pelo método da correlação digital de imagem; (b) variação da posição do eixo neutro durante um ensaio; (c) curvas tensão-deformação, em tracção e em compressão...63 Figura 4.14 – Posição do eixo neutro no ensaio de flexão em quatro pontos. ...65
Índice de tabelas
Tabela 1.1 – Módulo de elasticidade (GPa) do tecido ósseo cortical de bovino obtido por nanoindentação para o tecido hidratado e desidratado (adaptado de Rho J. et al., 1999). 9 Tabela 1.2 – Módulo de elasticidade (GPa) de quatro amostras de tecido ósseo cortical de equino para as quatro orientações dos provetes indicadas na Figura 1.5 (adaptado de
Barak et al., 2008). ...10
Tabela 1.3 – Comparação entre o rácio do coeficiente de Poisson e do respetivo módulo de elasticidade (adaptado de Sahar et al., 2006)...10
Tabela 2.1 – Características da câmara Baumer Optronic FWX20 CCD...16
Tabela 2.2 – Características da lente telecêntrica Opto-Engineering TC 23 09...17
Tabela 2.3 – Propriedades elásticas do tecido ósseo de bovino (Knets, 1978). ...18
Tabela 2.4 – Módulo de elasticidade longitudinal aparente dos provetes dos ensaios de tracção...23
Tabela 2.5 – Módulo de elasticidade longitudinal (EL) e coeficiente de Poisson ( ) dosLT provetes dos ensaios de tracção pelo método da CDI. ...26
Tabela 3.1 – Módulo de elasticidade aparente, a L E(GPa), para os diferentes vãos. ...35
Tabela 3.2 – Módulo de elasticidade, EL(GPa), e módulo de corte, GLT (GPa) pela teoria de vigas de Timoshenko para J=1,2 e J=1,5. ...37
Tabela 3.3 – Módulo de elasticidade longitudinal dos provetes dos ensaios de flexão em três pontos (vão máximo), com base no deslocamento do ponto central da zona de interesse da correlação digital de imagem...41
Tabela 3.4 – Módulo de elasticidade longitudinal à tracção e à compressão...49
Tabela 4.1 – Módulo de elasticidade longitudinal dos provetes dos ensaios de flexão em quatro pontos. ...58
Tabela 4.2 – Módulo de elasticidade longitudinal à tracção e à compressão, nos ensaios de flexão em quatro pontos...65
Nomenclatura
Simbologia
A – Área da secção transversal do provete b – Largura do provete
d – Posição do eixo neutro E – Módulo de elasticidade
a
E – Módulo de elasticidade aparente
L
E – Módulo de elasticidade longitudinal
c L
E – Módulo de elasticidade longitudinal à compressão
t L
E – Módulo de elasticidade longitudinal à tracção
R
E – Módulo de elasticidade radial
T
E – Módulo de elasticidade tangencial F – Força
G – Módulo de corte
LR
G – Módulo de corte no plano longitudinal-radial
LT
G – Módulo de corte no plano longitudinal-tangencial
RT
G – Módulo de corte no plano radial-tangencial h – Altura do provete
J – Coeficiente de corte L – Distância entre apoios R – Rigidez inicial
ij
S – Coeficientes elásticos
a
– Deslocamento devido à flexibilidade do atuador e do suporte
i
– Deslocamento devido à indentação
xx
– Deformação segundo x
c xx
– Deformação segundo x à compressão
t xx
xy – Deformação de corte xy F - – Força-deslocamento ij – Deformação angular xx
– Tensão normal remota
c xx
– Tensão máxima de compressão
t xx
– Tensão máxima de tracção ij
– Tensão de corte
– Coeficiente de PoissonLR
– Coeficiente de Poisson no plano longitudinal-radial
LT
– Coeficiente de Poisson no plano longitudinal-tangencial
RT
– Coeficiente de Poisson no plano radial-tangencial
Abreviaturas e acrónimos
CCD – Charged Coupled Device CDI – Correlação Digital de Imagem CV – Coeficiente de Variação
ESPI – Interferometria laser (Electronic Speckle Pattern Interferometry) Hz – Hertz
MEC – Matriz extracelular
MEF – Método dos Elementos Finitos
Introdução
O desenvolvimento de métodos adequados para a medição das propriedades mecânicas do tecido ósseo cortical é um assunto relevante para a medicina humana, face ao crescente envelhecimento da população. Contudo, trata-se de um problema que ainda está por resolver de forma satisfatória. É neste contexto que se insere a presente dissertação, que tem como objetivo a caracterização do comportamento elástico do tecido ósseo cortical através de ensaios de flexão.
Um dos aspetos críticos dos ensaios mecânicos em amostras de tecido ósseo cortical tem a ver com a orientação das direções de simetria anatómica do provete. É difícil que no processo de manufatura dos provetes as direções de simetria geométrica sejam coincidentes com as direções de simetria anatómica, atendendo à variabilidade local (dentro do mesmo órgão) do tecido ósseo e à forma complexa do órgão onde é feita a colheita.
Outra questão importante a considerar nos ensaios mecânicos do tecido ósseo cortical prende-se com a reduzida dimensão dos provetes e, por essa razão, com a influência dos apoios e dos atuadores. Por tudo isto, os ensaios mecânicos convencionais (de tração e de flexão) não introduzem nos provetes estados de tensão e de deformação simples e homogéneos. Em consequência, os métodos usuais de tratamento dos resultados experimentais podem conduzir a resultados e a conclusões erróneas. Para mitigar este tipo de problemas, é importante recorrer a técnicas óticas para a medição dos campos de deformações, como é o caso da técnica da correlação digital de imagem.
Neste trabalho procurou-se examinar, no caso dos ensaios de flexão em três e em quatro pontos, em que medida as questões anteriores afetam a identificação do módulo de elasticidade longitudinal do tecido ósseo cortical. Procurou-se também averiguar se o comportamento elástico do tecido ósseo cortical é distinto em tracção e em compressão. O ensaio de tracção foi usado como ensaio de referência para a determinação do módulo de elasticidade longitudinal. O trabalho experimental cingiu-se a amostras de tecido ósseo cortical retirado da parte medial da diáfise de fémures de bovinos jovens (com aproximadamente 8 meses de idade). Os provetes foram preparados para que o plano de ensaio coincidisse com o plano de simetria material LT (L é a direção longitudinal da diáfise e T é a direção tangencial). Todos os ensaios mecânicos foram simulados por
testes experimentais foi usada a técnica da correlação digital de imagem para a medição dos campos cinemáticos.
A dissertação está organizada em cinco capítulos. No capítulo 1 apresenta-se uma breve revisão bibliográfica sobre a estrutura e a composição do tecido ósseo. Neste capítulo são, ainda, abordadas a teoria da elasticidade anisotrópica e as propriedades elásticas do tecido ósseo, assim como os fatores que as influenciam.
Os capítulos 2, 3 e 4 são inteiramente dedicados ao ensaio de tracção, ao ensaio de flexão em três pontos e ao ensaio de flexão em quatro pontos, respetivamente. Em cada um destes capítulos, são feitas uma breve descrição do trabalho experimental, uma análise numérica por elementos finitos, a análise e a discussão dos resultados experimentais e o resumo das conclusões obtidas.
O capítulo 5 está reservado à apresentação das conclusões adquiridas a partir desta dissertação.
Capítulo 1 – Revisão bibliográfica
1.1 – Introdução
Neste Capítulo será apresentada uma revisão sumária dos aspetos gerais da estrutura e da composição do tecido ósseo cortical. Segue-se uma breve revisão bibliográfica onde se pretende identificar algumas das propriedades mecânicas do tecido ósseo cortical, bem como os fatores que as influenciam.
1.2 – Estrutura e composição do tecido ósseo
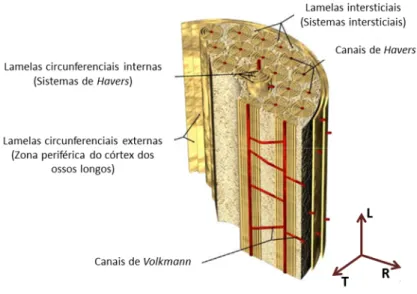
Os ossos longos dividem-se em epífise, metáfise e diáfise (Figura 1.1). A epífise é a extremidade do osso, sendo constituída por osso esponjoso e rodeada por osso compacto. Entre a epífise e a diáfise (zona intermédia) encontramos a metáfise cuja constituição é igual à da epífise. A diáfise apresenta uma estrutura cilíndrica, constituída por tecido ósseo compacto, e a cavidade medular central é preenchida por medula óssea e por alguns elementos de tecido ósseo esponjoso. O periósteo e o endósteo revestem a diáfise externa e internamente, respetivamente. O periósteo reveste a totalidade das superfícies do tecido ósseo, exceto as zonas de cartilagem articular epifisária, as áreas subcapsulares e as zonas de inserção de tendões e ligamentos. Já o endósteo reveste as paredes das cavidades ósseas que contêm a medula óssea (Dias et al., 2005).
Figura 1.1 – Estrutura dos ossos longos (Dias et al., 2005).
O tecido ósseo cortical é um material compósito, com uma complexa estrutura hierárquica, heterogénea e anisotrópica, constituído por três fases: a fase mineral (hidroxiapatite), a fase orgânica (colagénio tipo I) e a fase aquosa (água). Além disso, é um material vivo, cuja composição e estrutura se altera em função do ambiente mecânico e fisiológico. Em termos morfológicos existem dois tipos de tecido ósseo: o cortical ou compacto e o trabecular ou esponjoso (Figura 1.2). O tecido ósseo cortical constitui a diáfise dos ossos longos e a zona externa da maioria dos ossos, representando aproximadamente 70% do tecido ósseo existente no organismo. Quanto ao tecido ósseo esponjoso, situa-se essencialmente nas epífises e metáfises dos ossos longos, e na região central da maioria dos ossos planos e irregulares (Dias et al., 2005).
Figura 1.2 – Tecido ósseo cortical e esponjoso (Judas et al., 2012).
O tecido ósseo cortical desempenha três funções fundamentais para o organismo, nomeadamente o suporte dos músculos e tendões, a proteção da medula óssea e o armazenamento de iões (Dias et al., 2005, Rho et al., 1998). O tecido ósseo cortical é capaz de desempenhar as funções de suporte e de proteção devido a uma matriz óssea (MEC) mineralizada que lhe confere a dureza e a resistência necessárias. A matriz óssea é, também, o maior reservatório de iões minerais do organismo, particularmente de cálcio e fósforo, uma vez que a manutenção de calcemia dentro de determinados limites é essencial à realização de grande parte das reações fisiológicas do organismo. (Dias et al., 2005).
A nível microscópico, o tecido ósseo é formado pelos sistemas de Havers, com cerca de 50 μm de diâmetro e 1 cm de comprimento. São constituídos por um canal central (canal de Havers) rodeado por lamelas concêntricas (8 a 15), com 3 a 7 μm de espessura, aproximadamente. Perpendicularmente aos sistemas de Havers, existem os canais de Volkmann. O interior destes é composto por vasos sanguíneos, que permitem a conexão com a cavidade medular e o periósteo (Dias et al., 2005). A matriz óssea, para além da microestrutura e macroestrutura, ainda apresenta a sub-microestrutura, compreendida entre 1 e 10 μm, composta pelas lamelas. As fibras de colagénio e minerais incorporados formam a nanoestrutura, a partir de algumas centenas de nanómetros até 1 μm. Por fim, temos a sub-nanoestrutura constituída pela fase mineral, pelo colagénio e por outras proteínas orgânicas (Rho et al., 1998). Em síntese, a matriz óssea está organizada em
Figura 1.3 – Organização estrutural do tecido ósseo (adaptado de Rho et al., 1998).
1.3 – Elasticidade anisotrópica
A microestrutura do tecido ósseo cortical está orientada em três direções de simetria: a direção longitudinal (L), a direção radial (R) e a direção tangencial (T). A orientação longitudinal corresponde à direção dos sistemas de Havers, orientado paralelamente ao eixo maior da diáfise dos ossos longos. A orientação radial corresponde aos sistemas de Volkmann (Figura 1.4). Assim, e na perspetiva do comportamento mecânico, o tecido ósseo pode ser considerado como um material ortotrópico, sendo LRT o referencial de ortotropia.
Figura 1.4 – Morfologia do osso cortical ilustrando as direções de simetria material (Dias et al., 2005). Para um material ortotrópico, e no referencial de simetria material, a lei de Hooke tem a seguinte forma (Morais et al, 2006):
13 23 12 33 22 11 66 55 44 33 32 31 23 22 21 13 12 11 13 23 12 33 22 11 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 S S S S S S S S S S S S (1.1),
onde ii são as deformações lineares, são as deformações angulares,ij ii são as tensões
normais,
ij são as tensões de corte e Sij são os coeficientes elásticos. Num material ortotrópico, como é o caso do osso, verifica-se que apenas são necessários 9 coeficientes elásticos independentes, uma vez que existem três planos de simetria elástica.Nos ensaios mecânicos convencionais a identificação das propriedades elásticas dos materiais ortotrópicos é efetuada através da realização de ensaios onde o estado de tensão é plano e homogéneo (ensaios estaticamente determinados). Nestes casos a lei de Hooke pode ser assim representada, à custa das propriedades elásticas de engenharia (Morais et al, 2006):
12 22 11 12 2 1 12 2 21 1 12 22 11 1 0 0 0 1 0 1 G E E E E (1.2)
onde E representa o módulo de elasticidade, representa o coeficiente de Poisson e G o módulo de corte, no plano de simetria material a que diz respeito o ensaio mecânico.
1.4 – Fatores que influenciam as propriedades elásticas do tecido ósseo
O comportamento do tecido ósseo é influenciado por diferentes variáveis, relacionadas com o estado de saúde, a nutrição, o sexo e a idade (Doblaré et al., 2004). Tipicamente apenas a mudança na densidade mineral óssea é apontada como indicador do risco de fratura. De facto, a osteoporose influencia as propriedades do tecido ósseo (Kennedy et al., 2008). No que se refere ao comportamento mecânico, um dos aspetos mais estudado é o da variação das propriedades do tecido ósseo com a idade. Tamin et al. (2005), através de ensaios de flexão em quatro pontos, verificaram que no caso do tecido ósseo envelhecido (média de 82 anos) há uma maior predisposição para o aparecimento de microfissuras que no tecido jovem (média de 38 anos). Zioups et al. (1996) estudaram o efeito do dano no módulo de elasticidade em tecidos com graus de mineralização diferentes.
Para analisar as propriedades elásticas do tecido ósseo são utilizadas várias técnicas. Além dos ensaios mecânicos convencionais, têm emergido outras técnicas, como a microscopia acústica e a nanoindentação. Turner et al. (1999) utilizaram amostras do tecido ósseo cortical humano e, através destas técnicas, concluíram que o módulo de elasticidade na direção longitudinal é cerca de 40% maior do que na direção transversal. A técnica da nanoindentação foi também utilizada por Rho et al. (1999) num estudo sobre o comportamento mecânico de amostras desidratadas do tecido ósseo cortical de bovino. A desidratação é um fator que influencia as propriedades elásticas, sendo que fez aumentar o módulo de elasticidade em 9.7% para lamelas intersticiais e em 15.4% para sistemas de Havers (Tabela 1.1).
As técnicas de campo para a medição de deformações, baseadas em imagem, têm vindo a ser usadas no estudo do comportamento mecânico do tecido ósseo. Uma dessas técnicas é a ESPI (Electronic Speckle Pattern Interferometry). Barak et al. (2008) analisaram, através de ensaios de flexão em quatro pontos, o módulo de elasticidade de um equino, à tracção e à compressão com diferentes carregamentos, recorrendo a esta técnica. Concluíram que o módulo de Young do tecido ósseo cortical à tracção é 6% maior que à compressão. As causas apontadas para esta diferença são a estrutura complexa e hierárquica do tecido ósseo. Verificaram, ainda, que o módulo de elasticidade depende da orientação do provete (Figura 1.5 e Tabela 1.2).
Tabela 1.1 – Módulo de elasticidade (GPa) do tecido ósseo cortical de bovino obtido por
nanoindentação para o tecido hidratado e desidratado (adaptado de Rho J. et al., 1999).
Sistemas de Havers Lamelas intersticiais
Hidratado Desidratado Hidratado Desidratado Módulo de
elasticidade 21.1 24.4 25.1 27.5
Figura 1.5 – Orientações das amostras de tecido ósseo de equinos para ensaios de flexão em quatro
Tabela 1.2 – Módulo de elasticidade (GPa) de quatro amostras de tecido ósseo cortical de equino para
as quatro orientações dos provetes indicadas na Figura 1.5 (adaptado de Barak et al., 2008).
Amostra 1 2 3 4
Face a 15.1 22.4 20.2 20.1
Face b 20.0 21.0 24.0 24.3
Face c 21.5 21.0 22.3 23.6
Face d 16.5 19.2 18.3 18.1
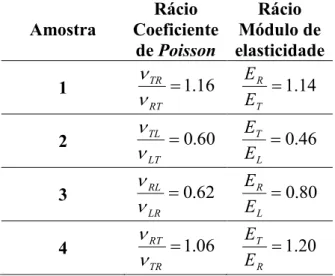
Shahar et al. (2006) também utilizaram a técnica de interferometria laser (ESPI) para determinar o módulo de elasticidade à compressão e o coeficiente de Poisson. Esta técnica permitiu a determinação destes coeficientes através da curva tensão-deformação tradicional e permitiu também medir simultaneamente a tensão ao longo de duas direções ortogonais na superfície da amostra. Concluíram que o módulo de elasticidade é superior na direção longitudinal, sendo que nas direções radial e transversal tomam um valor semelhante. Os valores obtidos por este método são idênticos aos obtidos por Reilly and Burstein (1975), Taylor et al. (2002), Dong and Guo (2004) e Iyo et al. (2004). Relativamente aos valores encontrados para o coeficiente de Poisson, estes ficaram abaixo do esperado, quando comparados com os estudos de Pithioux et al (2002) e Reilly and Burstein (1975). No entanto, verificaram que o rácio dos coeficientes de Poisson e do módulo de elasticidade associados são semelhantes (Tabela 1.3).
Tabela 1.3 – Comparação entre o rácio do coeficiente de Poisson e do respetivo módulo de elasticidade
(adaptado de Sahar et al., 2006).
Amostra CoeficienteRácio de Poisson Rácio Módulo de elasticidade 1 1.16 RT TR 14 . 1 T R E E 2 0.60 LT TL 46 . 0 L T E E 3 0.62 LR RL 80 . 0 L R E E 4 1.06 TR RT 20 . 1 R T E E
Capítulo 2 – Ensaio de tracção
2.1 – Introdução
Neste capítulo é descrito todo o trabalho experimental e numérico que foi realizado com o objetivo de identificar as propriedades elásticas em tracção do tecido ósseo cortical de bovino. O trabalho incidiu sobre o tecido ósseo cortical excisado de fémures e sobre o plano LT (L é a direção longitudinal da diáfise femoral e T é a direção tangencial). Foi identificado o módulo de elasticidade longitudinal EL e o coeficiente de
Poisson , recorrendo ao ensaio de tracção e à técnica da correlação digital de imagem.LT
A principal questão examinada neste trabalho foi a influência da anisotropia do plano material LT na correta identificação de ELe de .LT
2.2 – Trabalho experimental
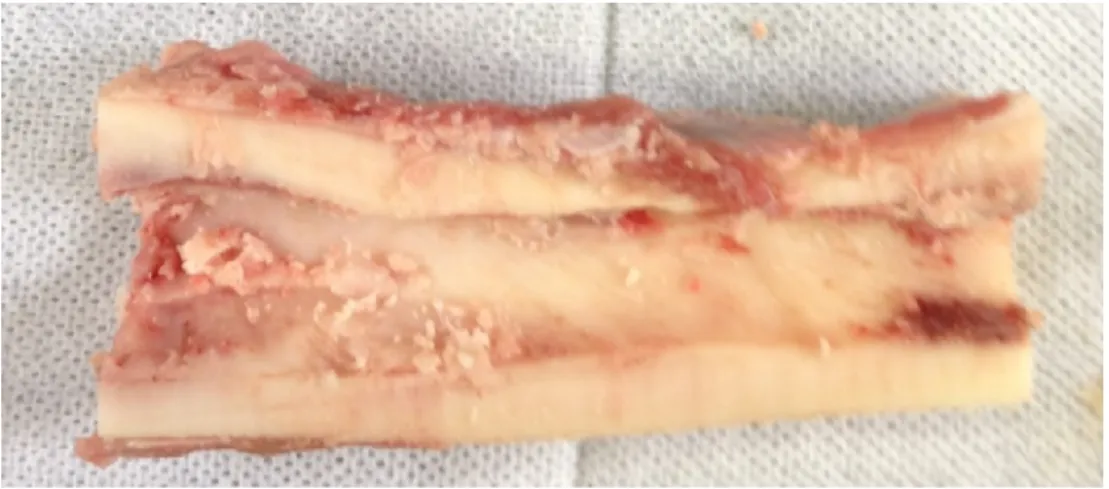
Este trabalho incidiu sobre a identificação das propriedades elásticas de tecido ósseo cortical, extraído de fémures de bovinos jovens (com aproximadamente oito meses de idade). Os fémures foram fornecidos pela empresa PEC – Nordeste (em Penafiel), tendo sido cortada uma secção medial de cada diáfise, com uma serra de fita (Figura 2.1). Esta secção foi envolvida por gaze embebida em soro fisiológico e conservada numa arca frigorífica, à temperatura de -20º C, até ao fabrico dos provetes.
O fabrico dos provetes usados nos ensaios mecânicos envolveu várias etapas, que a seguir descrevemos sucintamente. Após a descongelação de cada secção medial do fémur (durante cerca de 2 horas, à temperatura do laboratório), procedeu-se à primeira operação de fresagem, para geração de uma superfície plana no plano LT (L é a direção longitudinal da diáfise e T é a direção tangencial). Esta operação de fresagem foi realizada num engenho de furar das Oficinas de Engenharia Mecânica da UTAD (Figura 2.2), tendo sido usada uma fresa de topo com 24 mm de diâmetro (Figura 2.3), a uma frequência angular de rotação de 224 rpm e com o avanço da mesa controlado manualmente. Depois de gerada essa superfície, procedeu-se ao corte manual das extremidades (Figura 2.4), para que se pudesse executar a fresagem de outra superfície plana, paralela à primeira.
Durante as referidas operações de fresagem procurou-se manter o material hidratado com soro fisiológico.
Figura 2.1 – Secção medial da diáfise femoral de um bovino jovem.
Figura 2.3 – Detalhe da operação de fresagem da amostra.
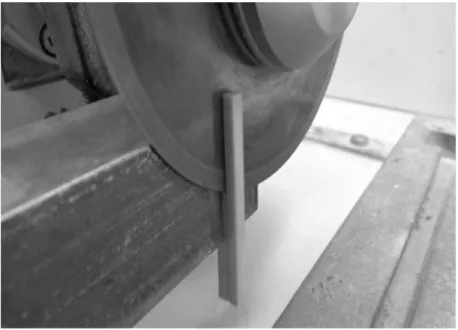
Figura 2.4 – Corte das extremidades da amostra.
No final da primeira etapa de manufatura dos provetes, a amostra foi acondicionada nas mesmas condições em que se encontrava inicialmente (Figura 2.5). A segunda etapa do processo de fabrico dos provetes realizou-se na máquina de corte da BUEHLER®, modelo ISOMET 5000, com lubrificação (solução de água e óleo) e discos
de corte BUEHLER®(referência 111190). Nesta operação foram extraídos de cada diáfise
dois provetes emparelhados longitudinalmente (Figura 2.6), um identificado com a letra a e outro com a letra b. Foram desta forma produzidos vinte provetes: dez provetes
restantes dez provetes (identificados de 1b a 10b) destinaram-se aos ensaios de flexão em três pontos. Antes da realização dos ensaios de flexão, os vinte provetes foram ensaiados à tracção, no domínio elástico.
Figura 2.5 – Acondicionamento da amostra após a primeira etapa do processo de fabrico.
Figura 2.6 – Segunda etapa do processo de fabrico dos provetes: corte de dois provetes na direção
Figura 2.7 – Provete do ensaio de tracção.
Na Figura 2.7 encontra-se a forma e as dimensões nominais dos provetes, com indicação das zonas de amarração dos provetes no ensaio de tração, bem como da região de interesse para a medição dos campos cinemáticos (campos dos deslocamentos e das deformações) por correlação digital de imagem. A cada provete foi associado um sistema de coordenadas cartesiano, em que o eixo dos xx coincide com a direção longitudinal (L) da diáfise e o eixo dos yy com a direção tangencial (T) da diáfise.
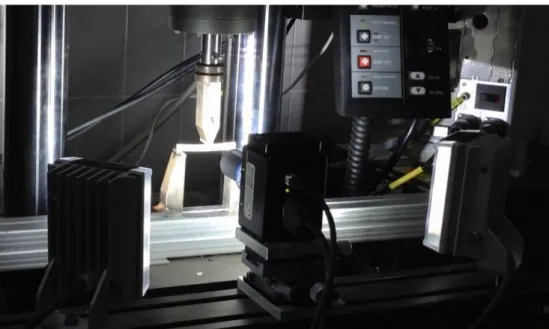
O ensaio de tracção foi realizado no Laboratório de Dinâmica da UTAD, na máquina MicroTester INSTRON®5848 (Figura 2.8), a uma velocidade do atuador de 0.5
mm/min. A força máxima do ensaio foi limitada a 250 N, por forma a não danificar os provetes. Neste ensaio foi utilizada a técnica da correlação digital de imagem para a medição dos campos cinemáticos. Para isso foi necessário gerar uma textura no plano LT (Longitudinal – Tangencial), pintando o provete com um aerógrafo IWATA (Custom Micron CM-B). Na Figura 2.9 pode ser apreciado o aspeto do padrão que foi obtido. Para o registo das imagens (a uma frequência de 1Hz), utilizou-se uma câmara Baumer Optronic FWX20, com um sensor CCD (Charged Coupled Device ) de 8 bits, e uma lente telecêntrica Opto-Engineering TC 23 09. As características do sistema ótico encontram-se na Tabela 2.1 e na Tabela 2.2 (Pereira, 2013). O processamento das imagens, para a obtenção dos campos dos deslocamentos e das deformações, foi efetuado com o software Aramis®.
Figura 2.8 – Ensaio de tracção.
Figura 2.9 – Padrão utilizado na técnica da correlação digital de imagem.
Tabela 2.1 – Características da câmara Baumer Optronic FWX20 CCD.
Sensor 1/1.8”
Resolução da câmara 1624 × 1236 pixéis2
Campo de visão 7.15 × 5.44 mm2
Tabela 2.2 – Características da lente telecêntrica Opto-Engineering TC 23 09. Ampliação 1.0 ± 3% Campo de visão (1/1.8”) 7.1 × 5.4 mm2 Distância de trabalho 63.3 ± 2 mm Número–f 11 Telecentricidade < 0.08º Profundidade de campo 0.9 mm
2.3 – Análise por elementos finitos do ensaio de tracção
Foi elaborado um modelo plano de elementos finitos do ensaio de tracção (Figura 2.10), recorrendo ao software comercial ANSYS®, com as dimensões do provete
indicadas na Figura 2.7. Foram empregues 1200 elementos PLANE 42, com um total de 1281 nós. As condições de fronteira empregues no modelo de elementos finitos procuraram reproduzir as condições de fronteira em vigor nos ensaios experimentais. Assim, nos nós da extremidade esquerda (Figura 2.10) foram impedidos os deslocamentos na direção xx e na direção yy; por sua vez, nos nós da extremidade direita foram impedidos os deslocamentos na direção yy e na direção xx foi imposto um deslocamento u=0.04 mm. Foi efetuada uma análise linear geométrica, em estado plano de tensão. O tecido ósseo foi considerado como um material elástico e ortotrópico, com as propriedades mecânicas que constam na Tabela 2.3 (apenas as propriedades relativas ao plano LT). Foram realizadas duas simulações: uma simulação em que as direções de simetria material (L e T) coincidem com as direções xx e yy, respetivamente (=0º, na Figura 2.10); outra simulação em que a direção de simetria material L faz o ângulo=30º com a direção xx (Figura 2.10).
Tabela 2.3 – Propriedades elásticas do tecido ósseo de bovino (Knets, 1978). EL (GPa) ET (GPa) ER (GPa) LT LR TR GLT (GPa) GLR (GPa) GRT (GPa) 20 8,5 6,9 0,31 0,32 0,62 4,9 3,6 2,4
O objetivo da simulação numérica do ensaio de tracção foi o de averiguar em que medida a diferença entre as direções de simetria material e as direções de simetria geométrica do provete influenciam a determinação do módulo de elasticidade longitudinal (EL) e do coeficiente de Poisson . Na verdade, não é garantido que essasLT
direções sejam coincidentes, não só por razões inerentes ao processo de fabrico dos provetes, mas sobretudo por causa da natural variabilidade da orientação da microestrutura do tecido ósseo no interior dum fémur. Na Figura 2.11 podem ser apreciados os campos das deformaçõesxx(Figura 2.11a),yy(Figura 2.11b) exy(Figura
2.11c), quando=0º; na Figura 2.12 encontram-se os mesmos campos cinemáticos, mas quando=30º.
(a)
(b)
(c)
(a)
(b)
(c)
Figura 2.12 – Campos das deformações, para30º: (a)
xx; (b)
yy; (c)
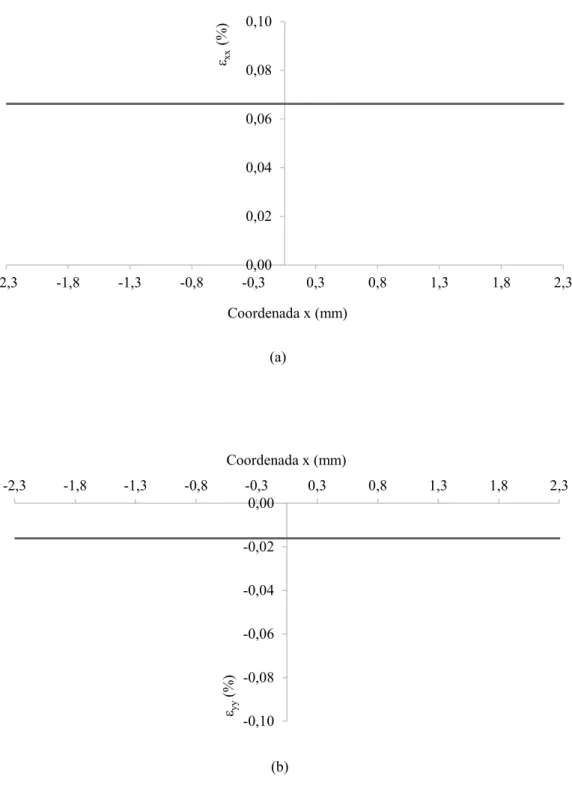
xy.Em ambas as situações, o aspeto global dos campos das deformações é o esperado para o ensaio de tracção uniaxial, excluindo as regiões próximas das amarras. Esta observação é reforçada pela análise da distribuição das deformaçõesxxeyyao longo do
segmento y=0, contido na zona de interesse da correlação digital de imagem (2.1x2.3
), assinalada na Figura 2.7. Conforme está representado na Figura 2.13, para =30º (Figura 2.10), as deformações xx e yy são constantes nesse segmento, sendo nula a
deformação de corte xy. Este resultado deve-se ao facto do plano LT do tecido ósseo
cortical ser um plano com uma baixa razão de EL ET (EL ET2.4). Na Figura 2.14 está representada a variação do módulo de elasticidade Excom o ângulo, de acordo com
a seguinte equação (Tsai e Hahan, 1980):
L LT LT T L x E ν G θ θ E θ E θ E 2 1 sin cos sin cos 1 4 4 2 2 (2.1)
Por aqui se vê que entre =0º e =30º o valor Ex reduz cerca de 25% (de 20GPa para
14.7GPa), sem que isso afete a uniformidade do campo das deformações na região de interesse. Em conclusão, o plano LT é um plano quase-isotrópico, sendo o ensaio de
(a)
(b)
Figura 2.13 – Distribuição das deformações no segmento de reta y=0 da zona de interesse da
correlação digital de imagem, para 30º: (a)
xx; (b)
yy(simulação numérica). 0,00 0,02 0,04 0,06 0,08 0,10 -2,3 -1,8 -1,3 -0,8 -0,3 0,3 0,8 1,3 1,8 2,3 xx (% ) Coordenada x (mm) -0,10 -0,08 -0,06 -0,04 -0,02 0,00 -2,3 -1,8 -1,3 -0,8 -0,3 0,3 0,8 1,3 1,8 2,3 yy (% ) Coordenada x (mm)Figura 2.14 – Variação do módulo de elasticidade (Ex) com a orientação do provete ().
2.4 – Análise e discussão dos resultados experimentais
Na Figura 2.15 estão reunidas todas as curvas força-deslocamento dos ensaios de tracção. A não linearidade destas curvas resulta do escorregamento dos provetes sobre as amarras (de cunhas deslizantes) e não reflete qualquer dano nos provetes. Vem a propósito referir que entre as faces dos provetes e as amarras foram inseridas folhas de lixa, com grão 150, para evitar que os mordentes das amarras danificassem as superfícies de aperto dos provetes. A utilização destas lixas facilitou o escorregamento dos provetes, para forças superiores a 200N. Isto porém não impediu o registo da resposta elástica inicial (até 250N) dos provetes, que serviu de base à identificação das propriedades elásticas em tracção do tecido ósseo cortical, no plano LT (isto é, ELe ).LT
Na Figura 2.16 pode ser apreciada a distribuição do módulo de elasticidade longitudinal aparente, calculado com base no deslocamento do atuador e do comprimento livre do provete entre amarras. Os mesmos resultados estão discriminados na Tabela 2.4. A dispersão dos resultados (coeficiente de variação, CV=10.1%) é a dispersão característica das propriedades mecânicas do tecido ósseo cortical de bovino jovem (Pereira, 2009; Macedo, 2015). O valor médio do módulo de elasticidade longitudinal aparente é, porém, cerca de 2.3 vezes inferior ao valor usado no modelo numérico (Tabela
0 5 10 15 20 25 0 10 20 30 40 50 60 70 80 90 Ex (G Pa ) (º)
2.3) e cerca de 2.5 vezes inferior ao reportado por Pereira (2009). Estre resultado é, sem dúvida, o reflexo do escorregamento entre os provetes e as amarras.
Figura 2.15 – Curvas força-deslocamento dos ensaios de tracção.
Figura 2.16 – Distribuição do módulo de elasticidade aparente (Ea) dos provetes de ensaio de tracção pelo método força-deslocamento.
0 50 100 150 200 250 300 0,00 0,02 0,04 0,06 0,08 0,10 0,12 Fo rç a (N ) Deslocamento (mm) 0 2 4 6 8 10 1a 1b 2a 2b 3a 3b 4a 4b 5a 5b 6a 6b 7a 7b 8a 8b 9a 9b 10a 10b Ea (G Pa ) Provete
Tabela 2.4 – Módulo de elasticidade longitudinal aparente dos provetes dos ensaios de tracção. Provete Ea(GPa) 1a 10.048 1b 9.487 2a 7.507 2b 3a 9.470 3b 9.451 4a 8.339 4b 8.155 5a 8.570 5b 8.167 6a 9.546 6b 9.391 7a 9.440 7b 9.556 8a 6.882 8b 7.568 9a 8.785 9b 8.437 10a 10.035 10b 9.059 Média 8.836 Desvio Padrão 0.896 CV* (%) 10.1 *Coeficiente de Variação
A correlação digital de imagem constitui um meio de ultrapassar as dificuldades de identificação correta do módulo de elasticidade longitudinal do tecido ósseo cortical, devidas ao escorregamento entre as amarras e o provete (Pereira, 2009). Relativamente aos extensómetros de resistência elétrica, a correlação digital de imagem tem a vantagem de não afetar significativamente o estado de hidratação do provete, como acontecerá com os extensómetros de resistência elétrica, devido às temperaturas atingidas na soldadura dos fios de ligação nos terminais dos extensómetros. Além disso, a correlação digital de imagem permite aceder à identificação do coeficiente de Poisson (neste trabalho, do coeficiente de Poisson ). Na Figura 2.17 estão ilustrados os campos das deformaçõesLT xx, yy e xy obtidos num provete, por correlação digital de imagem, quando a força
(a)
(b)
(c)
Figura 2.17 – (a) Campo das deformações
xx; (b) Campo das deformações
yy; (c) Campo dascoordenadas indicado na Figura 2.7. Os campos das deformações podem ser considerados uniformes, devendo-se a variabilidade espacial à variabilidade da microestrutura (osteons, canais de Harvers, canais de Volkman e tecido intersticial, nomeadamente) subjacente ao padrão speckle. Além disso, as deformações de corte (Figura 2.17c) são praticamente nulas em toda a região de interesse.
Considerando a tensão normal remota aplicada aos provetes (xx=F/A, sendo A a
área da secção transversal do provete) e o valor médio da deformaçãoxxem toda a zona
de interesse, obtiveram-se as curvas xx-xx de cada provete (no domínio elástico),
conforme está ilustrado na Figura 2.18a. Por regressão linear dos pontos experimentais obtivemos o módulo de elasticidade longitudinal (EL) de cada provete. Os resultados
encontram-se reunidos na Tabela 2.5 e a sua distribuição pode ser avaliada na Figura 2.19. O valor médio de EL obtido no presente trabalho (Tabela 2.5) é idêntico ao obtido por
Pereira (2009), numa amostra com 13 provetes (EL=20.321 GPa, com CV=13.3%).
(a)
Figura 2.18 – Ensaio de tracção: curva tensão-deformação (a) e curva deformação
transversal-deformação axial (b) do provete 1a. (continua) y = 209,46x - 0,1861 R² = 0,9996 0 5 10 15 20 25 30 0,00 0,02 0,04 0,06 0,08 0,10 0,12 0,14 xx (M Pa ) xx(%)
(b)
Figura 2.18 – Ensaio de tracção: curva tensão-deformação (a) e curva deformação
transversal-deformação axial (b) do provete 1a. (continuação)
Tabela 2.5 – Módulo de elasticidade longitudinal (EL) e coeficiente de Poisson (LT) dos provetes dos ensaios de tracção pelo método da CDI.
Provete EL (GPa) LT 1a 20.849 0.297 1b 0.381 2a 23.915 0.293 2b 21.246 0.336 3a 18.999 0.327 3b 20.007 0.311 4a 16.078 0.115 4b 19.907 0.278 5a 23.642 0.284 5b 23.963 0.301 6a 19.546 0.212 6b 20.452 0.433 7a 19.699 0.325 7b 19.151 0.205 8a 17.928 0.275 8b 20.545 0.297 9a 20.408 0.299 9b 19.836 0.250 10a 19.200 0.308 10b 18.366 0.310 Média 20.197 0.292 Desvio Padrão 1.994 0.065 CV* (%) 9.9 22.3 *Coeficiente de Variação y = -0,2755x - 0,0011 R² = 0,9902 -0,04 -0,03 -0,02 -0,01 0,000,00 0,05 0,10 0,15 yy (% ) xx(%)
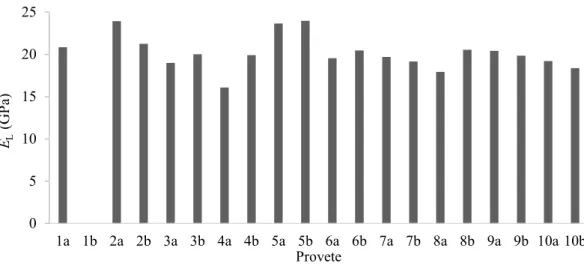
Figura 2.19 – Distribuição do módulo de elasticidade longitudinal (EL) dos provetes de ensaio de tracção pelo método da CDI.
Além do módulo elasticidade EL, o ensaio de tracção, aliado à correlação digital
de imagem, permitiu a identificação do coeficiente de Poisson , conforme estáLT
ilustrado na Figura 2.18b. Os valores obtidos estão registados na Tabela 2.5 e a sua distribuição pode ser examinada na Figura 2.20. O valor médio obtido neste trabalho (Tabela 2.5) é aproximadamente ¾ do valor determinado por Pereira (2009), numa amostra com 13 provetes ( =0.405, com CV=8.97%). Esta diferença significativa éLT
muito provavelmente consequência da distinta qualidade dos padrões de speckle alcançada nos dois trabalhos. De facto, Pereira (2009) criou o padrão de speckle pintando a superfície dos provetes com lápis de carvão, enquanto neste trabalho foi usada tinta preta projetada com um aerógrafo (ver secção 2.2).
0 5 10 15 20 25 1a 1b 2a 2b 3a 3b 4a 4b 5a 5b 6a 6b 7a 7b 8a 8b 9a 9b 10a 10b EL (G Pa ) Provete 0,00 0,10 0,20 0,30 0,40 0,50 1a 1b 2a 2b 3a 3b 4a 4b 5a 5b 6a 6b 7a 7b 8a 8b 9a 9b 10a 10b LT Provete
2.5 – Conclusões
Na sequência do trabalho que foi realizado sobre a utilização do ensaio de tracção para a identificação do módulo de elasticidade EL e do coeficiente de Poisson LT do
tecido ósseo cortical do fémur de bovino, retiramos as seguintes conclusões:
1. A direção longitudinal da diáfise coincide praticamente com a direção de simetria elástica L, sendo o plano LT um plano quase-isotrópico.
2. O ensaio de tracção em provetes orientados na direção longitudinal da diáfise, e quando os deslocamentos são medidos por correlação digital de imagem, permite a correta identificação de ELe de .LT
3. O módulo de elasticidade longitudinal do tecido ósseo cortical excisado de fémures de bovino jovem (com cerca de oito meses de idade) é igual a 20.2 GPa (coeficiente de variação CV=9.9%, numa amostra com 20 provetes). 4. O coeficiente de Poisson do tecido ósseo cortical excisado de fémures deLT
bovino jovem (com cerca de oito meses de idade) é =0.292 (coeficiente deLT
Capítulo 3 – Ensaio de flexão em três pontos
3.1 – Introdução
O ensaio de flexão em três pontos é um ensaio de utilização corrente para a caracterização do tecido ósseo cortical. Trata-se de um ensaio que emprega provetes com uma forma simples e que é relativamente fácil de executar. É geralmente utilizado para a determinação do módulo de elasticidade longitudinal (EL), através da teoria das vigas de
Bernoulli-Euler. Neste trabalho procuramos examinar várias questões relacionadas com a identificação do comportamento elástico do tecido ósseo cortical, proveniente de fémures de bovino jovem, através do ensaio de flexão em três pontos: (1) influência da anisotropia do plano de flexão (que neste trabalho é o plano LT); (2) possibilidade de identificação simultânea do módulo de elasticidade ELe do módulo de corte GLT, através
do método do vão variável, juntamente com a teoria das vigas de Timoshenko; (3) diferença entre o módulo de elasticidade EL em tracção e em compressão. Além dos
detalhes do trabalho experimental e numérico, apresentaremos e discutiremos os resultados que foram obtidos.
3.2 – Trabalho experimental
Todo o trabalho de preparação dos provetes foi já descrito na secção 2.2 do Capítulo 2. De facto, os provetes utilizados nos ensaios de flexão em três pontos são os provetes 1b a 10b que foram utilizados nos ensaios de tracção. Para cada um deles foram identificadas, através do ensaio de tracção, as propriedades elásticas (EL e ) que seLT
encontram na Tabela 2.5.
Na Figura 3.1 está representado o esquema do ensaio de flexão em três pontos, incluindo as dimensões nominais dos provetes. Nesta Figura está também identificada a zona de interesse onde foram medidos os campos dos deslocamentos, através da técnica da correlação digital de imagem. Foram realizados ensaios para diferentes distâncias entre apoios: L1=21 mm, L2=24,9 mm, L3=32,4 mm e L4=58 mm. Os ensaios para os vãos L1,
(a)
(b)
Figura 3.1 – (a) Provete para o ensaio de flexão em três pontos; (b) zona de interesse da CDI (dimensões
em mm).
Os ensaios de flexão em três pontos foram realizados no Laboratório de Dinâmica da UTAD, na máquina MicroTester INSTRON® 5848 (Figura 3.2). Em todos eles a
velocidade do atuador foi fixada em 0.1 mm/min. Para as distâncias entre apoios L1, L2e
L3, o deslocamento do atuador não ultrapassou 0.3 mm. A correlação digital de imagem
foi utilizada apenas nos ensaios para o vão máximo (L4). Os detalhes da preparação do
padrão de speckle e do sistema ótico empregue (Tabela 2.1 e Tabela 2.2) foram já apresentados na secção 2.2 do Capítulo 2.
Figura 3.2 – Aspeto geral do ensaio de flexão em três pontos.
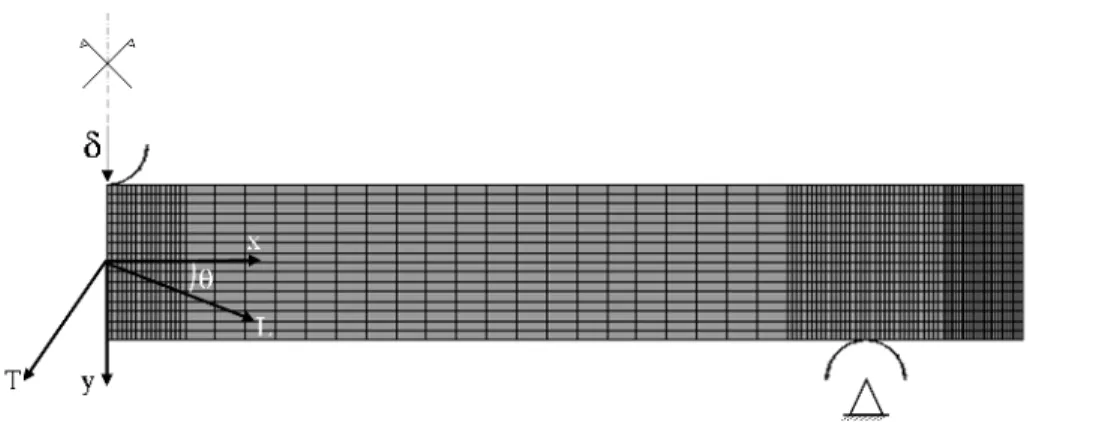
3.3 – Análise por elementos finitos
Foi construído um modelo tridimensional de elementos finitos do ensaio de flexão em três pontos, usando o software ANSYS®. As dimensões do provete são as indicadas
na Figura 3.1, mas considerando apenas o vão L4=58mm. Tirando partido das simetrias
do problema (simetrias geométrica, material e de solicitação) foi apenas modelado um quarto do provete (Figura 3.3). Foram utilizados 14082 elementos SOLID 45, com um total de 16409 nós. As condições de fronteira são as representadas na Figura 3.3, tendo sido imposto ao atuador um deslocamento vertical de 0.5 mm (a que corresponde uma força aplicada próxima de 100 N). O atuador e os apoios foram simulados como sólidos rígidos, usando os elementos de contacto TARGE170 e CONTA173.
O tecido ósseo foi considerado como um material elástico e ortotrópico, com as propriedades que estão na Tabela 2.3. Foram realizadas duas análises por elementos finitos, para dois valores distintos do ângulo (Figura 3.3): uma análise para =0º (as direções de simetria material L e T coincidentes com as direções xx e yy, respetivamente) e outra análise para=30º.
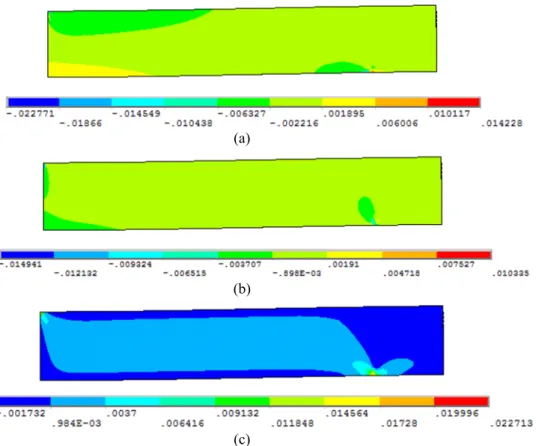
deformações no plano de flexão. Na Figura 3.4 pode ser apreciada a distribuição global das deformações xx,yyexy, quando=0º (Figura 3.4); por sua vez, na Figura 3.5 pode
ser examinada a distribuição dessas deformações quando =30º. Não se observam diferenças significativas entre os campos das deformações para =0º e para =30º. Este resultado está de acordo com o que foi registado no ensaio de tracção (secção 2.3, do Capítulo 2), a propósito da natureza quase-isotrópica do plano LT. Outro aspeto a realçar nos resultados apresentados na Figura 3.4 e na Figura 3.5 é a influência do atuador na distribuição das deformações nos pontos x=0 (isto é, na linha CC da Figura 3.1b). A distribuição das deformações não é a prevista pela teoria de vigas de Bernoulli-Euler ou pela teoria de vigas de Timoshenko. Estas teorias preveem uma distribuição linear da deformação xx, mas tal não acontece na vizinhança do atuador, como está ilustrado na
Figura 3.18a. Além disso, ambas teorias de flexão preveem um valor nulo para a deformaçãoyy, o que manifestamente não está de acordo com os resultados da simulação
por elementos finitos (Figura 3.4b e Figura 3.5b).
(a)
(b)
(c)
Figura 3.4 – Campo das deformações no ensaio de flexão em três pontos para 0º: (a)xx; (b) yy; (c)xy.
(a)
(b)
(c)
3.4 – Análise e discussão dos resultados experimentais
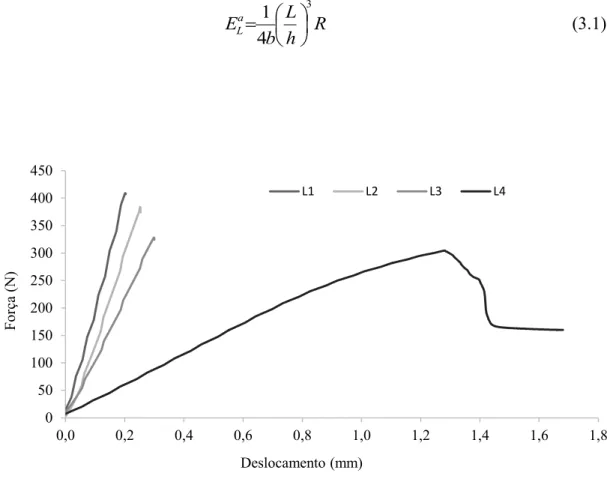
Uma das informações experimentais registada diretamente nos ensaios de flexão em três pontos são as curvas força-deslocamento do atuador (ou curvas F-). Na Figura 3.6 ilustramos o aspeto característico das curvas F-, para as diferentes distâncias entre apoios. A partir desta informação experimental foi determinado o módulo de elasticidade longitudinal aparente ( a
L
E ), através da teoria de vigas de Bernoulli-Euler:
R h L b Ea L 3 4 1 (3.1)
Figura 3.6 – Curvas força-deslocamento características, para os diferentes valores do vão (L1=21mm,
L2=24.9mm, L3=32.4mm e L4=58mm).
Na equação 3.1, h é a altura do provete, b é a largura do provete, L é a distância entre apoios e R é a rigidez inicial (isto é o declive do troço linear das curvas F-). Os resultados obtidos para o módulo de elasticidade longitudinal aparente ( a
L
E ) estão reunidos na Tabela 3.1. É interessante notar que a dispersão dos resultados diminui com o aumento do vão. Aliás, o valor médio de a
L
E também aumenta com o vão, tendendo
0 50 100 150 200 250 300 350 400 450 0,0 0,2 0,4 0,6 0,8 1,0 1,2 1,4 1,6 1,8 Fo rç a (N ) Deslocamento (mm) L1 L2 L3 L4
para o verdadeiro valor do módulo de elasticidade longitudinal (E ). EsteL
comportamento de a L
E pode ser observado na Figura 3.7.
Tabela 3.1 – Módulo de elasticidade aparente, a L
E(GPa), para os diferentes vãos.
Provete L1 L2 L3 L4 1b 6.311 8.113 12.118 18.586 2b 4.936 8.534 17.116 3b 4.993 8.146 10.913 17.164 4b 4.319 7.076 10.939 17.342 5b 4.495 7.396 10.974 18.700 6b 9.952 8.545 12.122 17.915 7b 9.692 8.661 11.867 18.485 8b 7.596 6.260 9.568 17.292 9b 9.059 7.775 11.556 18.307 10b 8.331 8.752 10.678 18.956 Média 6.968 7.858 10.927 17.986 Desvio padrão 2.225 0.825 1.143 0.707 CV* (%) 31.9 10.5 10.5 3.9 *Coeficiente de Variação
Figura 3.7 – Variação do módulo de elasticidade aparente (ELa) com a distância entre apoios.
A teoria de vigas de Timoshenko permite estimar o módulo de elasticidade longitudinal (EL) e o módulo de corte (GLT) a partir da relação entre o módulo de
elasticidade longitudinal aparente e a distância entre apoios (Garrido, 2004):
0 4 8 12 16 20 0 10 20 30 40 50 60 E a L(G Pa ) Vão (mm)
2 1 1 1 L h J G E ELa L LT (3.2)
em que h é a altura do provete e J é o coeficiente de corte (J=1,2 e J=1,5). É precisamente nesta equação que se baseia o chamado método do vão variável, para a identificação do módulo de elasticidade e do módulo de corte, através do ensaio de flexão. Na Figura 3.8 é apresentada a relação entre a
L
E /
1 e J( Lh/ )2 para um provete (provete 1b), considerando os dois valores do coeficiente de corte. Tal como é previsto pela teoria das vigas de Timoshenko (equação 3.2), a relação a
L
E /
1 – J( Lh/ )2 é linear. A partir dos parâmetros da regressão linear (Figura 3.8) é então possível determinar EL e GLT: a
ordenada na origem é o inverso de ELe o declive é o inverso de GLT. Os resultados assim
obtidos estão reunidos na Tabela 3.2.
Figura 3.8 – Comparação das linhas características do provete 1b (J=1,2 e J=1,5). y = 1,2997x + 0,0353 R² = 0,996 y = 1,0397x + 0,0353 R² = 0,996 0,00 0,02 0,04 0,06 0,08 0,10 0,12 0,14 0,16 0,18 0,00 0,02 0,04 0,06 0,08 0,10 0,12 0,14 1/ Ea (G Pa -1) J(h/L)2 J=1,2 J=1,5
Tabela 3.2 – Módulo de elasticidade, EL(GPa), e módulo de corte, GLT (GPa) pela teoria de vigas de
Timoshenko para J=1,2 e J=1,5.
Provete E(GPa)L J=1.2GLT (GPa)J=1.5
1b 28.350 0.769 0.962 2b 24.008 0.619 0.774 3b 4b 5b 6b 17.845 1.628 2.034 7b 18.380 1.557 1.946 8b 16.836 0.964 1.205 9b 18.467 1.381 1.726 10b 19.322 1.290 1.613 Média 20.459 1.173 1.466 Desvio Padrão 4.172 0.393 0.490 CV* (%) 20.4 33.5 33.5 *Coeficiente de Variação
O valor médio de EL obtido através do método do vão variável (Tabela 3.2) é
superior ao valor médio do módulo de elasticidade aparente para o vão L4=58mm (Tabela
3.1). Contudo essa diferença não parece ser significativa, conforme pode ser apreciado na Figura 3.9. De facto, excluindo os provetes 1b e 2b, os módulos de elasticidade dos restantes cinco provetes (6b a 10b) que foram determinados através do método do vão variável (Tabela 3.2) são idênticos aos obtidos através da teoria de Bernoulli-Euler (Tabela 3.1). Este resultado sugere que a teoria das vigas de Bernoulli-Euler é válida para relações L/h iguais ou superiores a 10. Quanto ao valor médio de GLT, além da grande
dispersão dos resultados (Tabela 3.2), é cerca de 4 a 5 vezes inferior ao valor médio obtido por Diaquino (2011), através do ensaio de Arcan: 5.18 GPa, com um coeficiente de variação de 13%, numa amostra de 14 provetes. Por esta razão, o método do vão variável não parece ser um método adequado para a identificação do módulo de corte GLT.
O ensaio de flexão em três pontos para a identificação do módulo de elasticidade longitudinal do tecido ósseo cortical tem três potenciais problemas, a saber: (1) indentação do provete na região de contacto do atuador; (2) a não coincidência do eixo neutro com o eixo geométrico do provete, devido à heterogeneidade do material; (3) a diferença de comportamento do tecido ósseo cortical à tracção e à compressão. Para
Figura 3.9 – Comparação entre o módulo de elasticidade longitudinal obtido pela teoria de vigas de Timoshenko e pela teoria de vigas de Bernoulli-Euler (L4=58mm).
examinar estas questões recorremos à correlação digital de imagem, para medir os campos dos deslocamentos e das deformações na região de interesse dos provetes, assinalada na Figura 3.1.
Na Figura 3.10 encontram-se as curvas força-deslocamento do atuador de todos os provetes onde foi usada a técnica da correlação digital de imagem (com a distância entre apoios L4=58mm). A rigidez inicial dos provetes que foi determinada a partir dessas
curvas é comparada na Figura 3.11 com a rigidez inicial que foi obtida usando o deslocamento do ponto central da região de interesse (ponto O, na Figura 3.1a). A rigidez obtida por este último método é sistematicamente superior à rigidez baseada no deslocamento do atuador, com uma única exceção (o provete 10b). Esta diferença sistemática pode ter duas origens, esquematizadas na Figura 3.12. Uma delas é a indentação do provete nos apoios (i,2) e, sobretudo, no atuador (i,1). A outra origem é a
flexibilidade do atuador e do suporte dos provetes (a). Por estas razões o deslocamento
do atuador () é superior ao deslocamento medido por correlação digital de imagem (CDI). Acontece que o deslocamento uy medido por correlação digital é constante ao
longo da linha CC da zona de interesse (Figura 3.1b), qualquer que seja o valor da força aplicada (mas no domínio da resposta elástica), conforme está documentado na Figura 3.13. Assim, as diferenças de rigidez que constam na Figura 3.11 deverão ser devidas sobretudo à flexibilidade do atuador e do suporte dos provetes.
15 17 19 21 23 25 27 29 1 2 3 4 5 6 7 8 9 10 EL (G Pa ) Provete