! " # $ % &!' ( ' ) * + & % & ,' -.%-/.
000' * 1' '* 2 + 2 1 3 45-,5%5 6
Sumário:
1. Estudo Qualitativo da Planta __________________________________________ 3
1.1. Descrição dos elementos da planta ____________________________________ 3
1.1.1. Motor, Encoder e Carga Inercial __________________________________ 3 1.1.2. Placa de Instrumentação e Controle _______________________________ 3 1.1.3. Driver ______________________________________________________ 4 1.1.4. Instrumentação _______________________________________________ 4 1.1.5. Indicação e Retransmissão de Velocidade: __________________________ 4 1.1.6. Indicação de Corrente: _________________________________________ 4 1.1.7. Indicação de Tensão: __________________________________________ 5
1.2. Familiarização com os elementos da planta. ____________________________ 5
1.3. Análise qualitativa do efeito da temperatura no coeficiente de atrito _________ 6
2. Experimentos _______________________________________________________ 7
2.1. Calibração do Transmissor de Velocidade ______________________________ 7
2.2. Modelagem Matemática do Motor de Corrente Contínua _________________ 10
2.2.1. Determinação da resistência de armadura R ________________________ 11 2.2.2. Determinação da Constante de Força Contra Eletromotriz - KE ________ 12
2.2.3. Determinação de B e F ________________________________________ 14 2.2.4. Determinação de J ____________________________________________ 15 2.2.5. Simulação Computacional do Motor CC __________________________ 17 2.2.6. Simulando com o script do Matlab®: _____________________________ 18
2.2.7. Simulando com o Simulink®: ___________________________________ 20 2.3. Controle de Velocidade utilizando o Software DVC26-SW1 _______________ 23
2.3.1. Controle Proporcional de Velocidade _____________________________ 25 2.3.2. Controle Proporcional mais Integral (PI) de Velocidade ______________ 27
3. Software DVC26-SW1 _______________________________________________ 28
! " # $ % &!' ( ' ) * + & % & ,' -.%-/.
000' * 1' '* 2 + 2 1 3 45-,5%5 6
! " # $ % &!' ( ' ) * + & % & ,' -.%-/.
000' * 1' '* 2 + 2 1 3 45-,5%5 6
1. Estudo Qualitativo da Planta
Serão apresentados a seguir os elementos que compõe a planta didática DVC26, sua interligação e características técnicas.
1.1.
Descrição dos elementos da planta
1.1.1. Motor, Encoder e Carga Inercial
É utilizada uma máquina de corrente contínua de imã permanente com escovas, mais comumente conhecidas por motores CC, cujas características nominais são:
• Tensão nominal 24V; • Corrente nominal 2A e,
• Velocidade nominal em vazio 2200 rpm.
A carga inercial é formada por um disco de latão ao qual podem ser adicionados parafusos para variação do momento polar de inércia.
O sensor de posição e velocidade utilizado é um encoder de 360 pulsos por revolução que fornece os sinais de A e B em quadratura e um sinal de passagem pela posição zero O.
O sinais A e B do encoder apresentam uma frequência proporcional à velocidade do eixo, assim a frequência do sinal será:
) ( 3 , 57 ) ( 6 / Hz F Hz F K F s rad encoder rpm encoder encoder encoder ω ω ω ⋅ = ⋅ = ⋅ =
1.1.2. Placa de Instrumentação e Controle
A placa principal de controle é responsável pelo tratamento dos sinais provenientes do conjunto motor/encoder e acionamento do motor CC.
No display são indicadas as variáveis:
• Velocidade atual
• Tensão aplicada ao motor • Corrente no motor
O conector CN2 é utilizado para realizar o monitoramento e o controle da planta utilizando equipamentos externos como CLPs, placas de aquisição de dados e circuitos eletrônicos desenvolvidos pelo próprio usuário.
Os sinais são todos padronizados de 0 – 10V e são: Tipo: Variável Funcionalidade Faixa
Saída ωa Velocidade 0 – 2200 rpm (velocidade mínima 130 rpm) Saída A Sinal A encoder 360 ppr - TTL
Saída B Sinal B encoder 360 ppr - TTL
Saída Z Sinal Zero encoder 1 ppr - TTL
Saída I Corrente 0 – 2A
! " # $ % &!' ( ' ) * + & % & ,' -.%-/.
000' * 1' '* 2 + 2 1 3 45-,5%5 6
Saída +Vref Referência OUT 0 – 10V para potenciômetro Entrada M Referência IN 0 – 10V para driver 0 -100% PWM
- GND 0 V Ground
O conector CN4 é utilizado para realizar o controle da planta através de um computador com o software DVC26-SW1 por uma porta USB.
O conector traseiro é utilizado prover as conexões entre a placa de controle, o motor, a fonte e o encoder e não deve ser modificado pelo usuário.
Os trimpots R18, R35, R36, R44 e R51 são para ajustes de zero e fundo de escala dos
sinais de entrada e saída e são ajustados em fábrica. Não é recomendado alterar estes ajustes.
1.1.3. Driver
O driver é um conversor chaveado de um quadrante, operando com modulação PWM em
alta freqüência e sinal de controle analógico.
• Conversor PWM de um quadrante • Tensão de controle: 0 – 10Vdc @ 2mA; • Tensão de saída: 0 a 24 Vdc e,
• Corrente de saída: até 2A com limitação em 1,8A.
1.1.4. Instrumentação
1.1.5. Indicação e Retransmissão de Velocidade:
O sinal do encoder é ligado a um tacômetro que indica a velocidade do motor em rpm
(revoluções por minuto) e opera também como transmissor de velocidade, apresentando os seguintes sinais disponíveis para registro e/ou controle:
• Saída digital direta do encoder A, B e O, sendo A e B em quadratura e O
um pulso de zero (5Vdc);
• Saída analógica de 0 a 10Vdc que equivale de 0 a 2200 rpm com taxa de
atualização de 100 ms e,
• Saída digital modulada em largura de pulso PWM de 0 a 100% (5Vdc).
Por default o display indica a velocidade do motor em RPM (rotações por minuto) e
pressionando-se as teclas Corrente ou Tensão a indicação muda para estas variáveis. Nesta situação o led vermelho D6 estará aceso.
Quando pressionada a tecla Inércia será realizada automaticamente a desacelaração do motor e o registro das velocidades. Esta funcionalidade faz parte de um experimento descrito no Apêndice 1.Nesta situação todos os leds estarão apagados.
1.1.6. Indicação de Corrente:
A corrente no motor é indicada diretamente em Ampères A quando é pressionada a tecla Corrente.
1.1.7. Indicação de Tensão:
A tensão aplicada ao motor é indicada diretamente em Volts V quando é pressionada a tecla Tensão.
Nesta situação o led amarelo D8 estará aceso. Pressionando novamente a tecla Tensão o
display volta a indicar a velocidade.
1.2.
Familiarização com os elementos da planta.
Para utilizar a planta pela primeira vez, recomenda-se seguir o procedimento abaixo. Note que, embora o motor seja de pequena potência, existe o risco de acidentes com as partes móveis que compõe o conjunto, principalmente com o disco de carga inercial.
Uma vez em movimento, NÃO tente parar o mecanismo com as mãos.
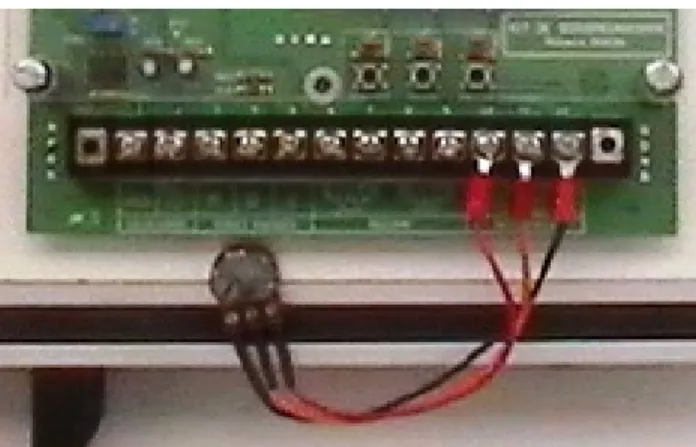
Instale o potenciômetro na posição indicada na figura abaixo. Este potenciômetro será a referência de tensão para o circuito de acionamento do motor (drive).
Figura 1 – Instalação do potenciômetro de referência
• Instale o potenciômetro de referência na planta da seguinte forma em CN2: o +Vref à extremidade CW do potenciômetro;
o M no centro (“slider”) do potenciômetro o GND à extremidade CCW do potenciômetro
• Verifique se o controle de velocidade está no mínimo (totalmente à esquerda
CCW) e energize a planta;
• Atue sobre o Pot de Referência e acompanhe a evolução da velocidade no display; • Ajuste a velocidade para aproximadamente 1000 rpm;
• Pressione a chave Tensão e verifique no display a tensão aplicada no motor e o led amarelo D8 estará aceso.
• Pressione a chave Corrente e verifique no display a corrente que circula pelo
motor e o led vermelho D6 estará aceso.
• Pressione a tecla Inércia; o motor vai desacelerar até a parada completa e o led verde D9 estará piscando. Finalizando o movimento o led verde estará aceso e o
display estará alternando duas mensagens. Esta mensagens serão detalhadas
! " # $ % &!' ( ' ) * + & % & ,' -.%-/.
000' * 1' '* 2 + 2 1 3 45-,5%5 6
1.3.
Análise qualitativa do efeito da temperatura no coeficiente
de atrito
Sabe-se que a viscosidade de fluidos é uma propriedade que depende da temperatura e, portanto interfere na lubrificação dos rolamentos da planta.
Sabe-se ainda que, para motores de corrente contínua, o torque aplicado à carga é diretamente proporcional à corrente de armadura.
• Instale o potenciômetro de referência conforme Figura 1;
• Com o motor inicialmente frio, acione-o com aproximadamente 2000 rpm; • Pressione a tecla Corrente e anote o valor da corrente no motor;
• Verifique que a corrente diminui com o passar do tempo até atingir um valor de
acomodação que não sofre alteração considerável;
• Compare o valor final com o valor inicial da corrente.
2. Experimentos
2.1.
Calibração do Transmissor de Velocidade
O encoder incremental rotativo é um transdutor de posição que fornece N pulsos a cada
revolução no eixo. No conjunto DVC26 o encoder fornece 360 pulsos por revolução (PPR).
A placa de instrumentação recebe o sinal do encoder, processa-o através de um
microcontrolador e retransmite a informação de velocidade através de um sinal analógico no padrão 0 – 10V com atualização a cada 100 ms.
O procedimento descrito a seguir pode ser estudado com mais detalhes em DOEBELIN, 1996 (Capítulo 3) onde a indicação de velocidade no display será o padrão e a saída analógica ωa
o instrumento a ser calibrado. Assim, a indicação de velocidade será a variável independente e a tensão no voltímetro a variável dependente.
Material necessário:
• Planta didática • Voltímetro DC
Procedimento:
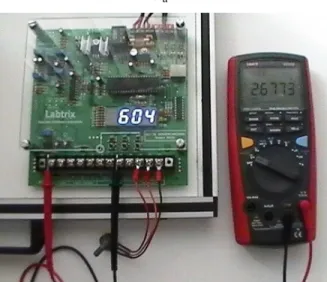
• Conecte o voltímetro à saída de sinal ωa.
Figura 2 – Ligação do multímetro para calibração do transmissor de velocidade
• Varie a velocidade do motor através do drive de 0 a 2000 rpm, anotando os
valores de velocidade e tensão. Recomenda-se 10 pontos varrendo toda a faixa.
• Organize uma tabela relacionando a velocidade lida no display com a tensão lida
no voltímetro. Se quiser trabalhar no Sistema Internacional proceda a conversão de rpm pra rad/s através de:
rpm s
rad
ω
π
ω
=
⋅
30
Medida Velocidade
(rpm)
Velocidade
(rad/s)
Tensão Vωa
(V)
1
2
3
4
5
6
7
8
9
10
Construa um gráfico tendo V versus ω (ωrpm no eixo horizontal e a tensão Vωa no eixo
vertical. Verifique qualitativamente se o gráfico resultante assemelha-se a uma reta.
Através do Método dos Mínimos Quadrados ou utilizando uma planilha eletrônica, proceda a uma regressão linear, obtendo a equação da curva de calibração:
b
a
V
=
⋅
ω
rpm
+
02 4 6 8 10 12
0 500 1000 1500 2000 2500
T
e
n
sã
o
(
V
)
Velocidade (rpm)
! " # $ % &!' ( ' ) * + & % & ,' -.%-/.
000' * 1' '* 2 + 2 1 3 45-,5%5 6
O sinal Vωa pode então ser utilizado como um medidor de velocidade invertendo-se a
equação:
a
b
V
rpm
−
=
ω
Considerações adicionais:
Evidentemente, inverter os eixos e realizar a regressão já na forma final (ωversus V) é
um procedimento mais rápido. Entretanto o experimentador deve estar ciente de quais são as variáveis independente e dependente no procedimento de calibração, principalmente quando se pretende analisar os erros envolvidos e o intervalo de confiança da medida.
! " # $ % &!' ( ' ) * + & % & ,' -.%-/.
000' * 1' '* 2 + 2 1 3 45-,5%5 6
2.2.
Modelagem Matemática do Motor de Corrente Contínua
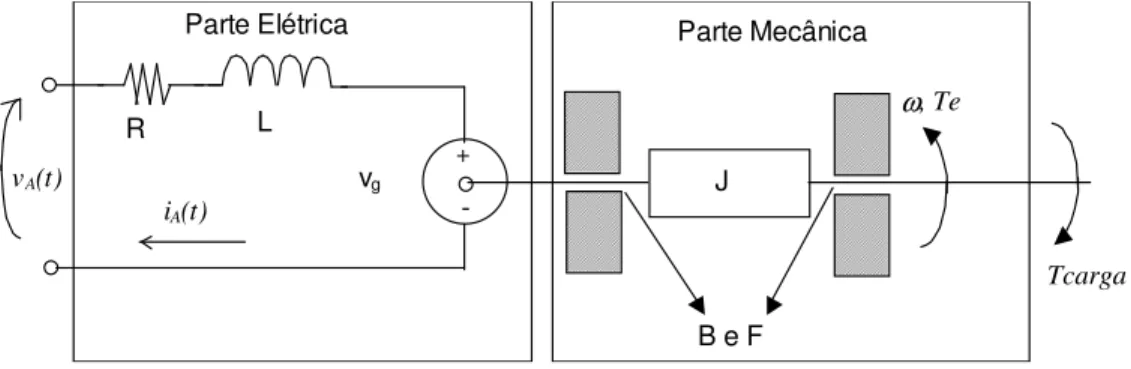
O diagrama abaixo representa um motor de corrente contínua de imã permanente.
R L
iA(t)
vA(t)
+
- vg
Parte Elétrica
J
B e F
ω, Te
Tcarga
Parte Mecânica
Figura 3 – Diagrama esquemático do motor CC
Um conjunto de equações que representam o motor de corrente contínua é:
A T e E g e g a A A i K T K v mecânica parte F B dt d J T elétrica parte v dt di L i R v ⋅ = ⋅ = − + ⋅ + ⋅ = − + ⋅ + ⋅ = ω ω ω Onde:
Variáveis: vA – tensão de armadura (V)
iA – corrente de armadura (A)
vg – tensão de FCEM (V)
Te – torque eletromagnético (Nm)
ω – velocidade (rad/s)
Parâmetros Elétricos R – resistência de armadura (Ω) L – indutância de armadura (H)
Parâmetros Mecânicos J – momento polar de inércia (kg m2) B – coeficiente de atrito viscoso (Nm s/rad) F – coeficiente de atrito seco (Nm)
Parâmetros Eletromecânicos KE – constante de FCEM - força contra eletro
motriz (Vs/rad)
KT – constante de torque (Nm/A)
O procedimento de modelagem é realizado para determinar, a partir de medidas experimentais os parâmetros elétricos, mecânicos e eletromecânicos do modelo (R, L, Ke, Kt, B, J e F).
! " # $ % &!' ( ' ) * + & % & ,' -.%-/.
000' * 1' '* 2 + 2 1 3 45-,5%5 6
2.2.1. Determinação da resistência de armadura R
Com o rotor travado a velocidade do motor será nula (ω=0) e aplicando-se corrente
contínua e constante ( =0
dt dia
) a equação da parte elétrica do motor é reduzida a:
A A
R
i
v
=
⋅
A resistência de armadura pode ser determinada aplicando-se uma tensão conhecida e medindo-se a corrente.
Procedimento:
• Com a planta energizada coloque o potenciômetro na posição zero. • Atuando no parafuso de carga, trave o motor.
• Pressione a tecla Corrente quando o led Vermelho acenderá
• Aumente o potenciômetro acompanhando a corrente e a tensão aplicada no motor
(tecla Tensão) e complete a tabela abaixo
Índice Tensão (V)
Corrente (A)
Resistência (Ω)
1 2 3 4 5
Média = Note que:
• O motor deve permanecer travado durante o ensaio;
• Recomenda-se não aplicar corrente superior a 50% da nominal; • Com o aquecimento do cobre a resistência de armadura será alterada e,
• Neste procedimento é considerado que o contato das escovas com o comutador é
! " # $ % &!' ( ' ) * + & % & ,' -.%-/.
000' * 1' '* 2 + 2 1 3 45-,5%5 6
2.2.2. Determinação da Constante de Força Contra Eletromotriz - KE
Considerando corrente contínua e constante ( =0
dt dia
), a equação da parte elétrica é reduzida a:
g A A R i v
v = ⋅ +
E sabendo que = ⋅
ω
E g K
v então:
ω
⋅ + ⋅
= A E
A R i K
v ou
E A A K i R v − ⋅ = ω Ou ainda:
ω
⋅
=
⋅
−
=
E A Ag
v
R
i
K
v
Assim, o valor de KE pode ser obtido através de regressão linear.
Para máquinas de corrente contínua de imã permanente a constante de FCEM, KE, é
numericamente igual à constante de torque KT, desde que expressas no Sistema Internacional.
Assim: E N T K K = ⋅ = ⋅ rad s V A m N Procedimento:
• Destrave o rotor.
• Com auxílio do potenciômetro, aplique tensão ao motor, anotando o valor da
tensão, da corrente e da velocidade preenchendo as colunas 1, 2 e 3 da tabela abaixo.
• Calcule as colunas 4 e 5.
• Recomenda-se registrar no mínimo 10 valores de 0 a 24Vdc. • Elabore um gráfico vg versus ω
• Graficamente ou numericamente determine a equação da reta. Pode ser utilizada
uma planilha de cálculo.
Tabela X – Ensaio do Motor DC – Rotor Livre
Índice 1 2 3 4 5
Tensão
(V) Corrente (A) Velocidade (rpm) Velocidade (rad/s) vg vA R iA
⋅ − =
(V) 1
2 3 4 5 6 7 8 9 10 11 12 13
0 2 4 6 8 10 12
0 20 40 60 80 100 120 140 160 180 200
T
e
n
sã
o
vg
(V
)
Velocidade (rad/s)
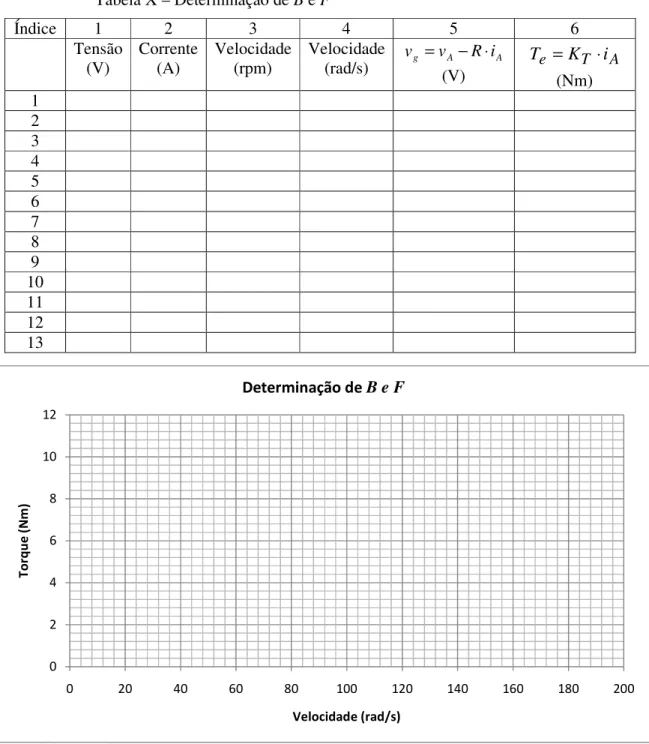
2.2.3. Determinação de B e F
Estes parâmetros são obtidos com a mesma tabela de dados do item anterior, devendo-se acrescentar uma coluna com os valores estimados de torque Te.
Como, a cada leitura, o motor está em regime permanente =0
dt
dw e a equação da parte
mecânica é reduzida a
T
e=
K
T⋅
i
A=
B
⋅
ω
+
F
Elaborar um gráfico de Te versus
ω
e graficamente ou por regressão linear determinaros valores de B e F, respectivamente os coeficientes angular e linear da reta ajustada.
Tabela X – Determinação de B e F
Índice 1 2 3 4 5 6
Tensão (V)
Corrente (A)
Velocidade (rpm)
Velocidade
(rad/s) vg vA R iA
⋅ − =
(V) e T A
i
K
T
=
⋅
(Nm) 1
2 3 4 5 6 7 8 9 10 11 12 13
0 2 4 6 8 10 12
0 20 40 60 80 100 120 140 160 180 200
T
o
rq
u
e
(
N
m
)
Velocidade (rad/s)
! " # $ % &!' ( ' ) * + & % & ,' -.%-/.
000' * 1' '* 2 + 2 1 3 45-,5%5 6
Como F representa o atrito seco, o mesmo pode ser dividido em duas partes, o atrito estático Fe e o atrito dinâmico Fd. O coeficiente determinado neste item corresponde a Fd.
Para estimar Fe, com o motor parado e o rotor livre, aumente vagarosamente a tensão
aplicada ao motor, observando a corrente no display (led Vermelho aceso). Quando o motor
inicia o movimento note que a corrente diminui. Anote o valor da corrente imediatamente antes de o motor iniciar o movimento. Esta é a corrente que causa o torque necessário para retirar o motor do repouso.
máx REPOUSO T
estático K I
F = ⋅
2.2.4. Determinação de J
A determinação de J é baseada em um ensaio de resposta transiente do sistema mecânico
livre.
Analisando a equação que representa a parte mecânica do motor quando o torque elétrico
Te aplicado é nulo, ou seja, quando a corrente é nula:
0
=
+
⋅
+
⋅
=
⋅
=
B
F
dt
d
J
i
K
T
e T Aω
ω
Resolvendo a equação diferencial:
F
B
dt
d
J
⋅
ω
+
⋅
ω
=
−
Submetida à condição inicial:
0
)
0
(
ω
ω
ω
=
=
inicial Tem-se que:
−
⋅
−
⋅
=
− − m m t te
B
F
e
t
ω
τ τω
(
)
01
Resposta do modelo teóricoOnde:
B J
m =
τ - constante de tempo mecânica do motor.
O modelo prevê que o motor passa a girar em sentido inverso atingindo a velocidade final
B F
final =−
ω (rad/s).
Entretanto é sabido que o fator de atrito F não produz trabalho e, portanto o modelo não é
válido para velocidades negativas. Procedimento:
• Aplicar tensão no motor até que a velocidade atinja um valor em torno de 2000
rpm.
• Pressionar a tecla Inércia. Neste instante um relê vai ser acionado e abrir a
conexão entre o drive e o motor, zerando a corrente aplicada. Neste instante o
• Construir um gráfico do decaimento da velocidade ω versus o tempo t
Índice 1 2 3
Tempo (s)
Velocidade (rpm)
Velocidade (rad/s) 1
2 3 4 5 6 7 8 9 10 11 12 13
Utilizando uma planilha eletrônica ou o Matlab™, sobrepor o gráfico experimental e a curva resposta do modelo teórico. Por um método numérico ou visualmente, variar o valor de J até ajustar a curva teórica aos pontos experimentais
Quando o ajuste for considerado adequado, este será o valor estimado para o momento polar de inércia J. Pelas razões explicadas acima, o ajuste da curva não deve considerar os tempos após o motor parar.
Sugestões Adicionais:
O disco de inércia possui furos nos quais podem ser adicionados parafusos para variação do momento de inércia. A inserção dos parafusos altera a massa e, portanto, a inércia da carga.
0 2 4 6 8 10 12
0 20 40 60 80 100 120 140 160 180 200
V
e
lo
ci
d
a
d
e
(
ra
d
/s
)
tempo (s)