ACCIONES BÁSICAS DE CONTROL Y
RESPUESTA DE SISTEMAS DE CONTROL
7 de noviembre de 2017
1
Objetivo
El alumno aprenderá sobre los distintos controladores, sus características y sus efectos en un sistema cuando se aplican de manera individual o correlacionada. Conocerá la metodología para seleccionar de manera adecuada el o los controladores necesarios para obtener la mejor respuesta posible del sistema. Adicionalmente, el alumno aprenderá a determinar si un sistema es estable o inestable a través del criterio de estabilidad de Routh.
2
Introducción
La mayoría de los sistemas de lazo abierto son estables con entradas de referencia limitadas. De lo que normalmente carecen los sistemas de lazo abierto es de velocidad y precisión suficientes para seguir la entrada de referencia aplicada al sistema. Si bien, la retroalimentación puede reconfigurar el comportamiento de un sistema, también tiene el potencial de desestabilizarlo. La retroalimentación también tiene beneficios potenciales, como mejorar la capacidad de un sistema al rechazar perturbaciones que puedan presentarse junto con la entrada de referencia. La retroalimentación también puede cambiar el ancho de banda y la ganancia total de un sistema.
Idealmente, el error entre la entrada de referencia y la salida del sistema deben tender a cero con el tiempo, de modo que la salida del sistema rastree la entrada de referencia.
En el mejor de los casos, el error tiende a cero con rapidez sin grandes demoras en la respuesta del sistema. Para cuantificar la relación entre retroalimentación y estabilidad se utiliza el criterio de Routh, que es un procedimiento algebraico que identifica polos inestables.
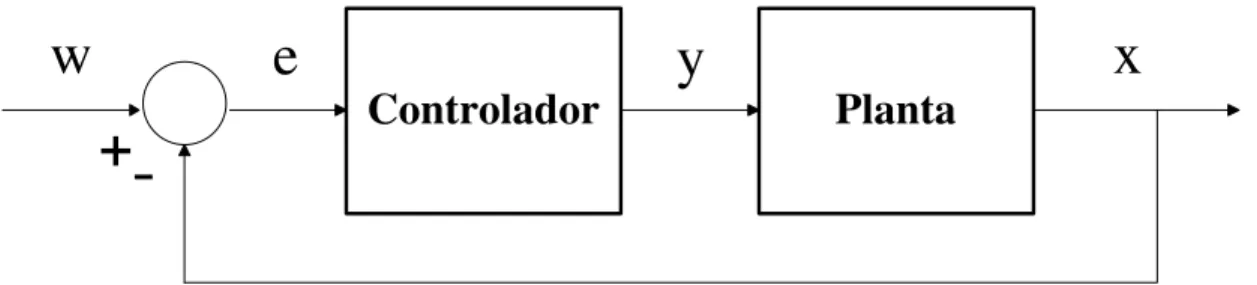
La Figura 1 muestra la estructura básica de un sistema de control de lazo cerrado:
Controlador
Planta
w
e
y
x
+
-Figura 1: Sistema de control de lazo cerrado
2.1
Controlador Proporcional (P)
La salida del controlador 𝑦(𝑡) (variable de control) es directamente proporcional a la variable de error 𝑒(𝑡):
𝑦(𝑡) = 𝐾𝑃⋅ 𝑒(𝑡) ( 1 )
Donde 𝐾𝑃 es la ganancia del controlador. Muchas veces el control proporcional no es suficiente para hacer que la salida vaya a la referencia y habrá desviación en estado estable.
2.2
Controlador Proporcional-Integral (PI)
En el controlador PI hay otro término en la ecuación del controlador:
𝑦(𝑡) = 𝐾𝑃[𝑒(𝑡) +𝑇1
𝐼 ∫ 𝑒(𝑡)𝑑𝑡] ( 2 )
Si el controlador está ajustado para ser lento y 𝑇𝐼 es grande, entonces el controlador actúa primero como un controlador proporcional, pero después cuando la integración comienza a tener efecto, la desviación de estado estable va lentamente a cero. Si el controlador se ajusta para ser rápido y 𝑇𝐼 es pequeño, entonces ambos términos (proporcional e integral) afectan la señal de control desde el principio. El sistema se vuelve más rápido, pero la señal de salida oscilará.
2.3
Controlador Proporcional-Integral-Derivativo (PID)
La ecuación del controlador PID posee los tres términos P, I y D:
𝑦(𝑡) = 𝐾𝑃[𝑒(𝑡) + 𝑇1
𝐼∫ 𝑒(𝑡)𝑑𝑡 + 𝑇𝐷
𝑑𝑒(𝑡) 𝑑𝑡
𝑡
0 ]
( 3 )
Donde 𝑇𝐷 es la constante de tiempo derivativa. El término derivativo actúa como un predictor. Esto es, al conocer la pendiente, el controlador puede anticipar la dirección del error y emplearla para controlar mejor el proceso.
El término derivativo tiene un gran efecto en sistemas donde existen perturbaciones, porque las perturbaciones son usualmente rápidas. Esto significa que un cambio rápido en la señal de error (perturbación) podrá inclusive hacer que el proceso caiga en un estado inestable. Por otra parte, el término derivativo puede acelerar el sistema controlado.
2.4
Características de los controladores P, I & D
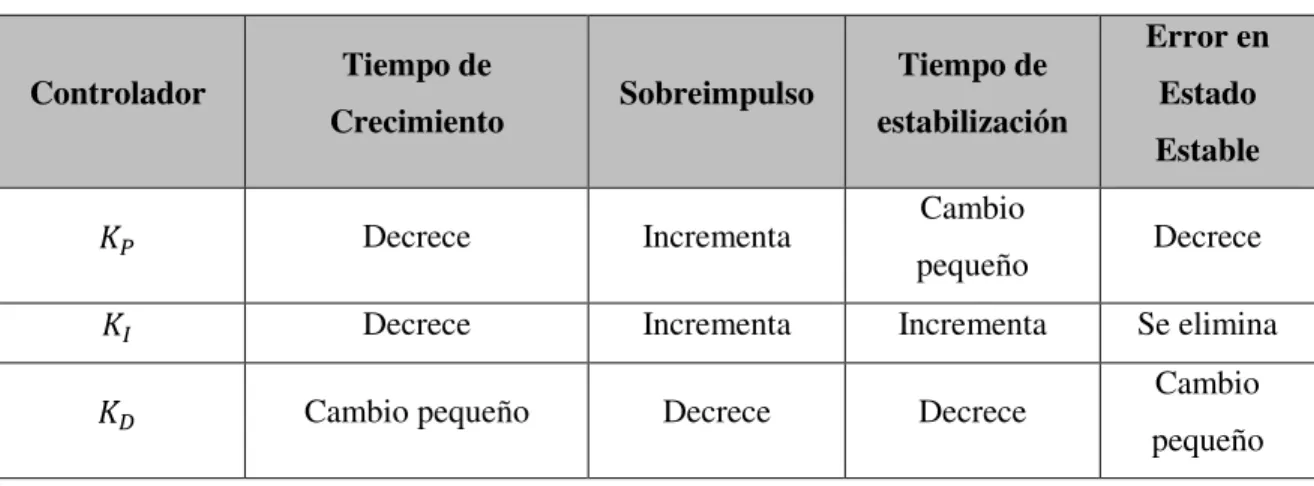
Un controlador proporcional (𝐾𝑃) tendrá el efecto de reducir el tiempo de crecimiento 𝑇𝑟 y reducirá, pero nunca eliminara, el error en estado estable. Un controlador integral (𝐾𝐼) tendrá el efecto de eliminar el error en estado estable, pero puede empeorar la respuesta transitoria. Un controlador derivativo (𝐾𝐷) tendrá el efecto de incrementar la estabilidad del sistema, reduciendo el sobreimpulso, y mejorara la respuesta transitoria. Los efectos de cada controlador en un sistema de lazo cerrado se resumen en la Tabla 1 mostrada a continuación.
Tabla 1: Características de los controladores
Controlador Tiempo de
Crecimiento Sobreimpulso
Tiempo de estabilización
Error en Estado Estable
𝐾𝑃 Decrece Incrementa
Cambio
pequeño Decrece
𝐾𝐼 Decrece Incrementa Incrementa Se elimina
𝐾𝐷 Cambio pequeño Decrece Decrece
Cambio pequeño
Tenga en mente que no siempre es necesario utilizar los tres controladores en un solo sistema. Lo mejor es mantener el controlador tan sencillo como sea posible.
2.5
Selección de un controlador
Cuando diseñe un controlador para un sistema dado, puede seguir los siguientes pasos: 1. Obtenga la respuesta de lazo abierto y determine que parámetros necesitan ser mejorados. 2. Añada un controlador proporcional para mejorar el tiempo de crecimiento.
3. Añada un controlador derivativo para mejorar el sobreimpulso. 4. Añada un controlador integral para eliminar el error en estado estable. 5. Ajuste cada uno 𝐾𝑃, 𝐾𝐷, 𝐾𝐼 hasta que obtenga la respuesta deseada.
3
Algoritmo de Routh
𝐺(𝑠) =𝑁(𝑠)𝐷(𝑠)
Las raíces del denominador definen la estabilidad del sistema:
𝐷(𝑠) = 𝑎𝑛𝑠𝑛+ 𝑎𝑛−1𝑠𝑛−1+ ⋯ + 𝑎1𝑠 + 𝑎0=! 0
¡Si uno de los coeficientes es cero o tiene diferente signo que los demás, el sistema es inestable!
Esquema de Routh:
𝒂𝒏 𝑎𝑛−2 𝑎𝑛−4 ⋯
𝒂𝒏−𝟏 𝑎𝑛−3 𝑎𝑛−5 ⋯
𝒃𝟏 𝑏3 𝑏5 ⋯
𝒄𝟏 𝑐3 𝑐5 ⋯
𝒅𝟏 𝑑3 𝑑5 ⋯
𝒆𝟏 𝑒3 𝑒5 ⋯
⋯ ⋯ ⋯ ⋯
𝑏1= 𝑠𝑔𝑛(𝑎𝑛−1)[𝑎𝑛−1𝑎𝑛−2− 𝑎𝑛𝑎𝑛−3]
𝑏3= 𝑠𝑔𝑛(𝑎𝑛−1)[𝑎𝑛−1𝑎𝑛−4− 𝑎𝑛𝑎𝑛−5]
𝑏𝑖= 𝑠𝑔𝑛(𝑎𝑛−1)[𝑎𝑛−1𝑎𝑛−(𝑖+1)− 𝑎𝑛𝑎𝑛−(𝑖+2)]
𝑐1= 𝑠𝑔𝑛(𝑏1)[𝑏1𝑎𝑛−3− 𝑎𝑛−1𝑏3]
𝑐3= 𝑠𝑔𝑛(𝑏1)[𝑏1𝑎𝑛−5− 𝑎𝑛−1𝑏5]
𝑐𝑖 = 𝑠𝑔𝑛(𝑏1)[𝑏1𝑎𝑛−(𝑖+2)− 𝑎𝑛−1𝑏𝑖+2]
𝑑𝑖= 𝑠𝑔𝑛(𝑐1)[𝑐1𝑏𝑖+2− 𝑏1𝑐𝑖+2]
⋮ ⋮
¡Si uno de los elementos en la primera columna es cero o tiene diferente signo que los demás, el
4
Desarrollo
1. Sea el siguiente sistema mostrado en la figura:
M
bx
k F
x
1
10 / 20 /
1
M kg
N b
m s
k N m
F N
a) Ingrese la función de transferencia en Matlab y obtenga la respuesta a escalón en lazo abierto. Compruebe la función de transferencia manualmente.
𝐺𝑆(𝑠) =𝑠2+ 10𝑠 + 201
b) Ingrese ahora un controlador proporcional para lazo cerrado, con valor 𝐾𝑃= 300. Obtenga la respuesta a escalón en lazo cerrado y compruebe la función de transferencia manualmente.
𝐺𝑃(𝑠) =𝑠2+ 10𝑠 + (20 + 𝐾𝐾𝑃 𝑃)
c) Utilice un controlador proporcional de valor 𝐾𝑃= 30 y uno integral de valor 𝐾𝐼 = 70. Obtenga la respuesta escalón en lazo cerrado y compruebe la función de transferencia manualmente.
𝐺𝑃𝐼(𝑠) =𝑠3+ 10𝑠2𝐾+ (20 + 𝐾𝑃𝑠 + 𝐾𝐼
d) Añada un controlador proporcional de valor 𝐾𝑃= 300 y derivativo de valor 𝐾𝐷 = 10. Obtenga la respuesta escalón en lazo cerrado. Compruebe manualmente la función de transferencia.
𝐺𝑃𝐷(𝑠) =𝑠2+ (10 + 𝐾𝐾𝐷𝑠 + 𝐾𝑃
𝐷)𝑠 + (20 + 𝐾𝑃)
e) Utilice un controlador proporcional de valor 𝐾𝑃=350, integral de valor 𝐾𝐼=300 y un controlador derivativo 𝐾𝐷=50. Obtenga la respuesta escalón en lazo cerrado .Compruebe manualmente la función de transferencia.
𝐺𝑃𝐼𝐷(𝑠) = 𝐾𝐷𝑠
2+ 𝐾 𝑃𝑠 + 𝐾𝐼
𝑠3+ (10 + 𝐾𝐷)𝑠2+ (20 + 𝐾𝑃)𝑠 + 𝐾𝐼
¿Cuáles son las diferencias principales que observa con cada controlador? ¿Qué método resulta más conveniente para mejorar el sobreimpulso? ¿Con qué controlador se mejora el tiempo de crecimiento?
2. Para los siguientes polinomios, indique si es un sistema estable o inestable de acuerdo al criterio de estabilidad de Routh. Utilice MATLAB para comprobar sus resultados.
a) 𝐷(𝑠) = 𝑠3+ 2𝑠2+ 5𝑠 + 6
b) 𝐷(𝑠) = 𝑠4+ 7𝑠3+ 24𝑠2+ 58𝑠 + 40
3. Para las siguientes funciones de transferencias, indique si es un sistema estable o inestable de acuerdo al criterio de estabilidad de Routh. Utilice MATLAB para comprobar sus resultados.
a)
2𝑠 + 2 𝑠2− 𝑠 − 2 b)
2
𝑠3+ 24𝑠2+ 75𝑠 − 100 c)