Universidade de Aveiro 2018
Departamento de Engenharia Mecânica
Departamento de Eletrónica, Telecomunicações e Informática
António Luís
Pinheiro Teixeira
Desenvolvimento de um simulador para articulação
Temporomandibular
Universidade de Aveiro 2018
Departamento de Engenharia Mecânica
Departamento de Eletrónica, Telecomunicações e Informática
António Luís
Pinheiro Teixeira
Desenvolvimento de um simulador para articulação
Temporomandibular
Dissertação apresentada à Universidade de Aveiro para cumprimento dos requisitos necessários à obtenção do grau de Mestre em Engenharia de Automação Industrial, realizada sob a orientação científica do Doutor Jorge Augusto Fernandes Ferreira, Professor Auxiliar do Departamento de Engenharia Mecânica da Universidade de Aveiro e sob a coorientação científica do Doutor António Manuel de Amaral Monteiro Ramos, Professor Auxiliar do Departamento de Engenharia Mecânica da Universidade de Aveiro.
Apoio financeiro dos projetos
UID/SEM/00481/2013-FCT e CENTRO-01-0145-FEDER-022083.
o júri
presidente Prof. Doutor Telmo Reis Cunha
professor auxiliar da Universidade de Aveiro
arguente Prof. Doutor Raul Manuel Pereira Morais dos Santos
professor associado com agregação da Universidade de Trás-Os-Montes e Alto Douro
orientador Prof. Doutor Jorge Augusto Fernandes Ferreira professor auxiliar da Universidade de Aveiro
agradecimentos Ao meu orientador e coorientador, pela paciência e auxílio prestado no decorrer da realização deste trabalho.
Aos meus pais, irmãos e amigos, por acreditarem e apoiarem em todas as minhas decisões e desafios que ocorreram durante a realização desta dissertação.
Aos meus colegas de mestrado Pedro Morais e Armindo Silva, pela ajuda prestada durante a dissertação.
Ao Engenheiro Rui Heitor, pela ajuda prestada durante a dissertação.
Ao Engenheiro António Festas, pela disponibilidade na maquinação das peças do simulador.
palavras-chave Articulação Temporomandibular; Mandíbula; Simulador; Monitorização e Controlo.
resumo A articulação temporomandibular é uma das articulações mais complexas do corpo humano e a que mais solicitações tem diariamente. Tendo isto em mente, esta dissertação tem como objetivo a atualização de um simulador para a articulação temporomandibular.
Neste trabalho foi projetado e desenvolvido um mecanismo posicionador composto por três motores de passo, que estão cada um deles unidos a um fuso de esferas, e que permite realizar ensaios da simulação 3D nos eixos x, y e z do movimento da mandíbula durante a mastigação. Este mecanismo tem acoplado na sua estrutura uma célula de carga, que permite medir as forças e momentos aplicados nos movimentos da mandíbula nos 3 eixos de posição.
Para comando e monitorização do posicionador foram desenvolvidas: i) a cinemática direta e inversa do mecanismo posicionador e ii) uma aplicação de monitorização e controlo no software LabVIEW. A aplicação de monitorização pretende representar os valores das forças e momentos medidos pela célula de carga. A aplicação de controlo permite atuar os motores de passo para cumprir a trajetória 3D desejada.
Para validação do hardware e software desenvolvidos foram realizados vários ensaios ao simulador da articulação temporomandibular.
Keywords Temporomandibular Joint; Jaw; Labview; Matlab; Simulator; Monitoring and Control.
abstract The temporomandibular joint is one of the most complex of the human body and the one that is most required on a daily basis. With this in mind, the goal of this dissertation is the update of a temporomandibular joint simulator.
During this assignment, a position mechanism composed by three stepper motors, each connected to ball screws, was projected and developed, allowing 3D simulation tests on the x, y and z axes of the movement of the temporomandibular joint when chewing. This mechanism has a load cell attached to its structure that allows the measurement of force and momentum applied in the movements of the jaw in the 3 axes of position.
In order to track and operate the positioner, there was the development of: i) direct and reverse cinematic of the position mechanism and ii) a tracking and control application in the LabVIEW software. The tracking application seeks to express the values of the force and momentum measured by the load cell, while the control application allows the control of the stepper motors so that they maintain the wanted 3D trajectory.
Several tests were performed on the temporomandibular joint simulator in order to validate the use of the hardware and software developed.
Índice
Introdução ... 1
1.1 Enquadramento... 1
1.2 Objetivos ... 2
1.3 Estrutura da Dissertação ... 2
Revisão do Estado da Arte ... 3
2.1 Importância da Articulação Temporomandibular ... 3
2.2 Simuladores existentes ... 4
2.2.1 Simulador BITE MASTER II ... 5
2.2.2 Simulador Bristol Dento-Munch ... 5
2.2.3 Simulador de movimentação da mandíbula humana ... 7
2.2.4 Simulador Antropomórfico de 6DOF ... 7
2.2.5 Simulador de mastigação ... 9
2.2.6 Simulador da Universidade de Aveiro ... 15
2.3 Análise aos simuladores ... 16
Componentes do Simulador ... 19
3.1 Controlador ... 19
3.2 Músculos pneumáticos ... 19
3.3 Válvulas reguladoras de pressão ... 20
3.4 Conversores Tensão-Corrente ... 21
3.5 Módulo de saída analógico ... 21
3.6 Módulos de Aquisição de dados ... 22
3.7 Células de carga ... 22 3.8 Plataforma Mecânica ... 23 3.9 Estado do Simulador ... 24 Posicionador de 3 eixos ... 25 4.1 Especificações... 25 4.2 Atualização do Hardware ... 31 4.2.1 Motores de passo ... 31 4.2.2 Driver ... 31
4.2.3 Módulo de Saída digital ... 32
4.2.4 Ligações de acionamento dos motores de passo ... 33
4.2.6 Célula de carga KYOWA ... 35
4.2.7 Alimentação da célula de carga ... 35
4.3 Montagem do Posicionador ... 37
4.4 Estado do Simulador ... 41
Aplicações de Operação e Monitorização ... 43
5.1 Arquitetura do Software ... 43
5.2 Programação em MATLAB ... 44
5.2.1 Cinemática do Posicionador ... 44
5.2.2 Resultados da cinemática do posicionador ... 49
5.2.3 Leitura de dados da célula de carga KYOWA ... 50
5.3 Programação LabVIEW ... 50
5.3.1 Ficheiros de configuração das trajetórias ... 51
5.3.2 Programação dos Sub-VIs ... 52
5.3.3 Monitorização da célula de carga ... 53
5.3.4 Escrita de dados adquiridos pela célula de carga ... 55
5.3.5 Resultado da calibração da célula de carga ... 56
5.3.6 Atuação dos motores de passo ... 57
Ensaio Experimental ... 59
Conclusões e trabalhos futuros ... 63
7.1 Conclusões... 63
Lista de Figuras
FIGURA 1- MÚSCULOS QUE CONTROLAM A ATM [2]... 3
FIGURA 2- SIMULADOR BITE MASTER II [3] ... 5
FIGURA 3- ATUADORES DO SIMULADOR BRISTOL DENTO-MUNCH [4] ... 6
FIGURA 4- SIMULADOR BRISTOL DENTO-MUNCH [4] ... 6
FIGURA 5- SIMULADOR DE MOVIMENTAÇÃO DA MANDÍBULA HUMANA [5] ... 7
FIGURA 6-SIMULADOR ANTROPOMÓRFICO PRIMEIRO MODELO (A) LAYOUT DO SIMULADOR (B) EFEITO FINAL E CONJUNTO DE ENGRENAGENS TELESCOPIAS. [6] ... 8
FIGURA 7- SIMULADOR ANTROPOMÓRFICO SEGUNDO MODELO (A) LAYOUT DO SIMULADOR (B) MECANISMO DE AMPLIFICAÇÃO DO BINÁRIO. [6] ... 9
FIGURA 8- MOVIMENTOS DA MANDÍBULA DURANTE A MASTIGAÇÃO [7] ... 10
FIGURA 9- MOVIMENTO MANDIBULAR (A) MOVIMENTO DE ROTAÇÃO DA MANDÍBULA (B) MOVIMENTO DE TRANSLAÇÃO DA MANDÍBULA [8] ... 11
FIGURA 10- ROBÔ DE MASTIGAÇÃO (A) ESTRUTURA FINAL DO ROBÔ DE MASTIGAÇÃO (B) ESTRUTURA DOS ATUADORES DO ROBÔ [7] ... 12
FIGURA 11- SIMULADOR MCG JT -3D DO BIORESEARCH COMPANHIA TM [8] ... 12
FIGURA 12- MEDIÇÃO DOS MOVIMENTOS DA MANDÍBULA DO ADULTO 1[8] ... 13
FIGURA 13- MEDIÇÃO DOS MOVIMENTOS DA MANDÍBULA DO ADULTO 2 [8] ... 13
FIGURA 14- MEDIÇÃO DOS MOVIMENTOS DA MANDÍBULA DO ADULTO 3 [8] ... 13
FIGURA 15- AS TRAJETÓRIAS DO PONTO INCISIVO INFERIOR [8] ... 14
FIGURA 16- DIAGRAMA DE SOFTWARE DO SIMULADOR [1] ... 15
FIGURA 17- APARELHO DE TESTE [2] ... 16
FIGURA 18- CHASSI COMPACTRIO 9074 [9] ... 19
FIGURA 19- MÚSCULOS PNEUMÁTICOS ... 19
FIGURA 20- VÁLVULAS REGULADORAS DE PRESSÃO PROPORCIONAIS [11] ... 20
FIGURA 21- CONVERSORES TENSÃO-CORRENTE [12]... 21
FIGURA 22- MÓDULO DE SAÍDA ANALÓGICO NI 9264 [13] ... 21
FIGURA 23- MÓDULOS DE AQUISIÇÃO DE DADOS NI 9237 ... 22
FIGURA 24- CÉLULA DE CARGA HBM U9B [14] ... 22
FIGURA 25- PLATAFORMA MECÂNICA [1] ... 23
FIGURA 26- DISTRIBUIÇÃO DOS MÚSCULOS [1] ... 24
FIGURA 27- SIMULADOR DA UNIVERSIDADE DE AVEIRO ... 24
FIGURA 28- LAYOUT DOS MOTORES DE PASSO ... 25
FIGURA 29- FUSO DE ESFERAS ... 26
FIGURA 30- CREMALHEIRA ... 27
FIGURA 31- CORREIA COM RODAS DENTADAS ... 27
FIGURA 32- POSICIONADOR 3 EIXOS... 29
FIGURA 33- SIMULADOR DA UNIVERSIDADE DE AVEIRO COM POSICIONADOR ... 30
FIGURA 34- MOTORES DE PASSO ... 31
FIGURA 35- DRIVER UTILIZADO NO HARDWARE ... 32
FIGURA 36- MÓDULOS DE SAÍDA DIGITAL NI 9472 [16] ... 32
FIGURA 37- LIGAÇÕES ENTRE A CARTA NI-9472, O DRIVER E RESPETIVO MOTOR [15] ... 33
FIGURA 38- MÓDULO DE AQUISIÇÃO DE DADOS NI 9201[17]... 34
FIGURA 39- CÉLULA DE CARGA KYOWA [18] ... 35
FIGURA 40- CIRCUITO ELETRÓNICO DO REGULADOR LM317HV [1] ... 36
FIGURA 41-CIRCUITO ELETRÓNICO DO REGULADOR 7805 [19] ... 36
FIGURA 42- FONTE DE ALIMENTAÇÃO EXTERNA ... 37
FIGURA 43- SUPORTE COM O FUSO DE ESFERAS MONTADO... 37
FIGURA 44- MONTAGEM DOS EIXOS DO SIMULADOR (A) MONTAGEM DO EIXO X (B) MONTAGEM DO EIXO Y (C) MONTAGEM DO EIXO Z ... 39
FIGURA 45- MONTAGEM DA CÉLULA DE CARGA E RESPETIVOS SUPORTES ... 40
FIGURA 46- COLAGEM DA ARTICULAÇÃO ESFÉRICA COM O ENCAIXE NA MANDÍBULA ... 40
FIGURA 48- SIMULADOR ATUALIZADO DA UNIVERSIDADE DE AVEIRO ... 42
FIGURA 49- DIAGRAMA DE SOFTWARE ... 44
FIGURA 50- REGRAS DO ALGORITMO DE DENAVIT-HARTENBERG PARA UM MANIPULADOR COM N JUNTAS [20]... 45
FIGURA 51- POSICIONADOR COM OS ELOS DAS JUNTAS PRISMÁTICAS IDENTIFICADOS ... 46
FIGURA 52- MATRIZ DE TRANSFORMAÇÃO GEOMÉTRICA ASSOCIADA A UM ELO I [20] ... 47
FIGURA 53- PROGRAMAÇÃO DA FUNÇÃO MULTI_INVKINRR.M ... 47
FIGURA 54- PROGRAMAÇÃO DA FUNÇÃO POLYTRAJV.M ... 48
FIGURA 55- PROGRAMAÇÃO DA FUNÇÃO MULTIPOLYTRAJV.M ... 48
FIGURA 56- RESULTADO DAS CINEMÁTICAS EM MATLAB ... 49
FIGURA 57- LEITURA DE FICHEIRO DE DADOS GERADOS PELO LABVIEW [1] ... 50
FIGURA 58- CRIAÇÃO DE PROJETO EM LABVIEW ... 51
FIGURA 59- LAYOUT DO VI 'LER_CONFIGX' ... 52
FIGURA 60- LAYOUT DO SUB-VI ‘VARIÁVEISX’ ... 53
FIGURA 61- EXCEL FORNECIDO PELO FABRICANTE DA CÉLULA ... 54
FIGURA 62- PROGRAMAÇÃO DO FILTRO PASSA BAIXO ... 54
FIGURA 63- LAYOUT DO VI 'MONITORIZACAO_FORCAS' ... 55
FIGURA 64- PROGRAMAÇÃO DA GRAVAÇÃO DE DADOS ADQUIRIDOS PELA CÉLULA DE CARGA ... 55
FIGURA 65- CONFIGURAÇÃO DO BLOCO DE ESCRITA DOS DADOS ADQUIRIDOS PELA CÉLULA DE CARGA ... 56
FIGURA 66- MEDIÇÃO DOS PESOS (A) MEDIÇÃO DO PESO 27N (B) MEDIÇÃO DO PESO 4N (C) MEDIÇÃO DO PESO 3N ... 56
FIGURA 67- ENSAIO DA CALIBRAÇÃO DA CÉLULA DE CARGA ... 57
FIGURA 68- RESULTADOS DA CALIBRAÇÃO DA CÉLULA DE CARGA ... 57
FIGURA 69-PROPRIEDADES DA SEGUNDA CARTA NI-9472 ... 58
FIGURA 70- LAYOUT DO VI 'CONTROLO_MOTORES'... 58
FIGURA 71- MEDIÇÃO DAS FORÇAS DO EIXO X DURANTE A MASTIGAÇÃO... 59
FIGURA 72- MEDIÇÃO DAS FORÇAS DO EIXO Y DURANTE A MASTIGAÇÃO... 60
FIGURA 73-MEDIÇÃO DAS FORÇAS DO EIXO Z DURANTE A MASTIGAÇÃO ... 60
FIGURA 74- MEDIÇÃO DOS MOMENTOS DO EIXO X DURANTE A MASTIGAÇÃO ... 61
FIGURA 75-MEDIÇÃO DOS MOMENTOS DO EIXO Y DURANTE A MASTIGAÇÃO ... 61
Lista de Tabelas
TABELA 1-CARACTERÍSTICAS PRINCIPAIS DO SIMULADOR BRISTOL DENTO-MUNCH [4] ... 6
TABELA 2- MEDIÇÃO DOS MOVIMENTOS DA MANDÍBULA DOS 10 ADULTOS [8]... 14
TABELA 3- CARACTERÍSTICAS DOS TIPOS DE ATUAÇÃO ... 16
TABELA 4- COMPARAÇÃO DOS SIMULADORES ... 17
TABELA 5- CARACTERÍSTICAS DOS MÚSCULOS [10]... 20
TABELA 6- CARACTERÍSTICAS DAS VÁLVULAS REGULADORAS DE PRESSÃO PROPORCIONAIS [11] ... 20
TABELA 7- CARACTERÍSTICAS DOS CONVERSORES TENSÃO-CORRENTE [12] ... 21
TABELA 8- CARACTERÍSTICAS DO MÓDULO DE SAÍDA ANALÓGICO NI 9264 [13] ... 22
TABELA 9- CARACTERÍSTICAS DOS MÓDULOS DE AQUISIÇÃO DE DADOS NI 9237 ... 22
TABELA 10- CARACTERÍSTICAS DA CÉLULA DE CARGA HBM U9B [14] ... 23
TABELA 11- LEGENDA DO POSICIONADOR DE 3 EIXOS ... 30
TABELA 12- CARACTERÍSTICAS DOS MOTORES DE PASSO ... 31
TABELA 13- CARACTERÍSTICAS DO DRIVER [15] ... 32
TABELA 14- CARACTERÍSTICAS DO MÓDULO NI 9472 [16] ... 33
TABELA 15- PPR DISPONÍVEIS NESTE DRIVER [15] ... 34
TABELA 16- AS CORRENTES DE SAÍDA DISPONÍVEIS NESTE DRIVER [15] ... 34
TABELA 17- CARACTERÍSTICAS DO MÓDULO NI 9201[17] ... 35
TABELA 18- CARACTERÍSTICA DA CÉLULA DE CARGA KYOWA [18] ... 35
Nomenclatura e Notações
ATM Articulação Temporomandibular
MATLAB MATrix LABoratory
LabVIEW Laboratory Virtual Instruments Engineering Workbench
VI Virtual Instruments
NI National Instruments
GUI Graphical User Interface
DOF Degree of Freedom
RPM Rotação Por Minuto
PPS Pulsos Por Segundo
PPR Pulsos Por Rotação
IO Input/output
Capítulo 1
Introdução
1.1 Enquadramento
Esta dissertação consiste numa atualização ao simulador da articulação temporomandibular (ATM) presente no laboratório de biomecânica do Departamento de Engenharia Mecânica da Universidade de Aveiro.
O simulador da Universidade de Aveiro inicialmente foi desenvolvido para simular as ações musculares da ATM para simular essas ações foram utilizados 10 músculos pneumáticos. Como está descrito nas dissertações do Hugo Azevedo (2016)[1] e Tiago Rodrigues (2017)[2] existiu um estudo da distribuição dos músculos pneumáticos na ATM.
Para controlar as forças aplicadas pelos músculos pneumáticos foram inseridos neste simulador 10 células de carga, em que cada célula está aplicada a cada músculo pneumático. Como a atuação do simulador é pneumática, foi necessário projetar e construir um esquema electropneumático. Este esquema é constituído por:
• 1 válvula de corte;
• 1 válvula reguladora de pressão;
• 10 válvulas reguladoras de pressão proporcionais com a tensão de entrada.
Para controlar o software do simulador é utilizado um compactRIO (cRIO-9074), este controlador é um chassis da National Instruments e pode ser programado pelo software LabVIEW. Neste chassi foram utilizados 3 slots para as cartas de aquisição de dados (NI 9237) das células de carga, e um slot para a carta de saída analógica (NI 9264), para definir o valor de pressão à saída das 10 válvulas reguladoras de pressão proporcionais.
Na dissertação do Hugo Azevedo (2016)[1] foram criadas aplicações em MATLAB e LabVIEW que permitem simular as ações musculares da ATM no simulador. As aplicações desenvolvidas recorrendo ao MATLAB são as responsáveis pela correta configuração dos ensaios a realizar. As aplicações desenvolvidas em LabVIEW são responsáveis pela operação e monitorização do simulador. Nestas aplicações são também implementados os controladores de força para os diversos músculos.
1.2 Objetivos
O objetivo principal do projeto tem por base a atualização do simulador da ATM presente na Universidade de Aveiro. Esta atualização ao simulador apresenta um mecanismo posicionador que simula o posicionamento da mandíbula durante o ciclo de mastigação. O posicionador é utilizado para melhorar a precisão nos movimentos da mandíbula.
As tarefas necessárias para alcançar estes objetivos são:
• Desenvolvimento de um mecanismo posicionador de 3 eixos;
• Integração de uma célula de carga com 6 ligações para medição, que monitoriza as forças e momentos aplicados aos movimentos da mandíbula;
• Desenvolvimento de uma interface para medição de extensometria e para aplicação de controlo em posição com 3 eixos.
1.3 Estrutura da Dissertação
A presente dissertação está dividida em sete capítulos. No capítulo 1 é descrito o enquadramento, objetivos e estrutura da dissertação.
No capítulo 2 é apresentada uma revisão do estado da arte e da tecnologia referente a simuladores da ATM.
No capítulo 3 é descrito o simulador existente no Laboratório de Biomecânica que serviu como base a esta dissertação. Este capítulo inclui ainda a apresentação do sistema electropneumático, da plataforma mecânica e da plataforma de hardware.
No capítulo 4 é descrito o projeto da estrutura do mecanismo posicionador de 3 eixos de posição. Esta estrutura foi conhecida recorrendo ao software SolidEdge.
No capítulo 5 é descrito o desenvolvimento das aplicações para a operação, controlo e monitorização do simulador. Estas aplicações foram desenvolvidas recorrendo às plataformas de software MATLAB e LabVIEW.
No capítulo 6 são realizados ensaios experimentais que visam a validação do sistema de controlo e das aplicações desenvolvidas.
Capítulo 2
Revisão do Estado da Arte
2.1 Importância da Articulação Temporomandibular
A articulação temporomandibular está presente entre a mandíbula e o osso temporal, tradicionalmente conhecida pela ATM. Esta articulação é considerada uma das mais complexas do organismo humano devido à combinação de movimentos de translação e rotação, sendo a grande responsável pelos movimentos exercidos ao falar, bocejar e principalmente pelos movimentos envolvidos na mastigação.
A ATM é uma articulação que se move livremente e é caracterizada por ter as superfícies ósseas cobertas por cartilagem articular e uma cápsula articular, sendo que possui também um disco intra-articular constituído de fibrocartilagem que subdivide a articulação em dois compartimentos, superior e inferior.
Os principais músculos que controlam a ATM são: • Masséter
• Temporal
• Pterigóideo medial • Pterigóideo lateral
A figura 1 representa os músculos que controlam a ATM.
Este conjunto de músculos são muitas vezes referidos como os músculos da mastigação, sendo os principais atuadores nos quatro movimentos envolvidos na mastigação. A elevação é considerada o movimento de fecho da boca, enquanto que a depressão da mandíbula é a abertura, onde o pterigóideo lateral é o principal músculo responsável por esta ação. A protrusão é a translação anterior da mandíbula causada pela contração simultânea do pterigóideo lateral e medial, enquanto que a retração corresponde à translação posterior da mandíbula devido à contração das fibras horizontais do músculo temporal.
O conjunto de patologias associadas a ATM designam-se de disfunções temporomandibulares estima-se que aproximadamente um terço da população mundial apresente algum sintoma destas disfunções, caraterizada principalmente por dor facial ou craniana, dificuldade de movimentação mandibular e sons articulares. A incidência das disfunções temporomandibulares varia de acordo com diferentes estudos, mas calcula-se que a sua prevalência na população mundial ronde os 5 a 25% [1].
Grande parte das patologias associadas à ATM pode ser tratada por tratamentos conservativos, como repouso ou com recurso a medicamentos. No entanto em casos mais complexos será necessária a intervenção cirúrgica. Técnicas cirúrgicas minimamente evasivas como a artrocentese e a artroscopia são atualmente cada vez mais aplicadas em situações mais precoces, estando associadas a técnicas de reabilitação funcional contribuindo para uma melhoria dos resultados terapêuticos. Todas estas técnicas apresentam uma taxa de sucesso global acima dos 80% [2].
Outro tratamento utilizado nas disfunções temporomandibulares é a artroplastia, tem como objetivo a restruturação da anatomia e função da ATM. É a abordagem cirúrgica de excelência para a remodelação e reparação das estruturas articulares. É muitas vezes aplicada como último recurso quando métodos de tratamento mais conservadores falham, apresentando uma taxa de sucesso de 99%. Existem patologias associadas à ATM onde a taxa de incidência deste tratamento é acima de 15% [2].
Para aplicar os tratamentos é importante saber as forças aplicadas na ATM. A medição direta das forças é de dificuldade elevada devido às técnicas demasiado invasivas necessárias para a sua obtenção. Para estimar as forças no ser humano recorre-se principalmente à análise de modelos gerados computacionalmente. Este facto leva a existência de vários estudos de simuladores que pretendem simular o movimento real da ATM.
2.2 Simuladores existentes
Existem vários simuladores que foram criados com o mesmo objetivo desta dissertação. Neste subcapítulo vão ser representado alguns simuladores existentes.
2.2.1 Simulador BITE MASTER II
O objetivo deste simulador, figura 2, é simular a mordida humana e reproduzir testes preliminares com vários queijos. O BITE Master II é composto por um suporte XYZ. Cada um dos movimentos do suporte é controlado por um motor de passo, cujas ações são controladas pelos comandos do software BITE Master II. Neste simulador existe também uma dentadura humana e quatro células de carga capazes de medir as cargas verticais e laterais.
As dentaduras são usadas por causa da geometria dos dentes, que serve para explicar a variação na perceção da dureza em vários queijos. Os suportes XYZ estão conectados à dentadura através de um poste de metal e uma junta esférica, tornando assim o simulador com seis graus de liberdade possíveis na reprodução do movimento da mandíbula humana [3].
Figura 2- Simulador BITE Master II [3]
Sete indivíduos treinados em análise descritiva e empregados pela Universidade de Arkansas do Departamento de Ciência dos Alimentos, participaram neste estudo. O limite superior da força medida pelo BITE Master II é aproximadamente 125 N. Foram selecionados queijos que não ultrapassassem o limite de força do simulador, mantendo um gradiente de dureza substancial entre os produtos [3].
Os indivíduos participaram individualmente numa sessão de 1,5h. Os primeiros minutos foram usadas para medições do movimento da mandíbula, enquanto os restantes foram utilizados para avaliação da textura das amostras de queijo.
2.2.2 Simulador Bristol Dento-Munch
O simulador tem como objetivo simular o desgaste dos materiais em componentes dentários, tais como os dentes individuais, coroas ou um conjunto completo de dentes. Este simulador é baseado na plataforma de Stewart. O simulador de Bristol foi desenvolvido para replicar padrões de mastigação humanos precisos em 6 DOF.
A base (placa inferior) do simulador, figura 3, é fixa. A plataforma (placa superior) do simulador é móvel em 6-DOF, variando o comprimento de um ou mais dos atuadores. Para controlar o movimento da mastigação com a plataforma de Stewart, a mandíbula inferior é ligada à sua placa superior [4].
Figura 3- Atuadores do simulador Bristol Dento-Munch [4]
Os suportes são movidos por seis atuadores elétricos. As características principais do simulador estão apresentadas na tabela 1.
Tabela 1-Características principais do simulador Bristol Dento-Munch [4]
Características Dimensões
Cinemáticas paralelas 6 DOF
Comprimentos dos atuadores (mm) 100
Força máxima dos atuadores (N) 1000
Altura do simulador (mm) 370
Na mastigação é necessária uma combinação de forças e controlo de posição. A montagem completa de todos os componentes, figura 4, é composto por três módulos básicos:
• Um modelo da mandíbula, que incluí transdutores de força, dentes artificiais anteriores/posteriores e raízes com material vitrocerâmica;
• Um módulo de conformidade;
• Uma placa adaptadora para montar o equipamento do simulador.
2.2.3 Simulador de movimentação da mandíbula humana
Este simulador tem como objetivo a simulação de uma mandíbula realista, sendo aplicado no estudo das propriedades mecânicas do maxilar, cargas dinâmicas, limites comuns e degeneração articular. Este conhecimento pode levar à capacidade de testar melhores próteses da mandíbula ou até mesmo para a eventual compreensão e tratamento de doenças na ATM.
O projeto detalhado consiste no movimento do fecho da mandíbula que é simulado por três músculos de cada lado do crânio. Apenas três motores são usados para controlar o sistema. Cada motor controla o seu músculo específico em ambos os lados do crânio. Existem níveis muito baixos de força, por conseguinte, o simulador foi construído com material de baixa densidade. O desenho é uma armação que mantém os motores, polias e crânio como pode ser visto na figura 5. Usando um sistema de roldanas consegue-se ligar os motores ao crânio para criar movimento.
Neste simulador pretende-se aumentar os níveis de binário dos motores. Em vez de comprar motores capazes de produzir os mesmos níveis de força da mandíbula humana, isto é, para reduzir o investimento, o peso e o tamanho físico da estrutura que suporta o motor, utilizou-se uma polia de acionamento ligada ao motor. A polia controla uma roldana redutora que impulsiona um eixo com cada grupo muscular, permitindo um controle simultâneo de ambos os lados da mandíbula.
Cada um dos lados do crânio tem três pontos de fixação, um para cada músculo. Cada ponto simula os ângulos corretos para os músculos masséter, temporal e pterigóideo [5].
Figura 5- Simulador de movimentação da mandíbula humana [5]
2.2.4 Simulador Antropomórfico de 6DOF
Este simulador pode ser utilizado em áreas de odontologia, terapia da fala e no estudo do efeito das expressões faciais na comunicação. O simulador proposto consiste em três partes principais:
• Uma prótese da mandíbula; • Duas juntas articuladas.
Este simulador é capaz de produzir 2-DOF de movimento retangular ao longo da coordenada vertical e horizontal. Suas articulações, por outro lado, são capazes de reproduzir 4-DOF e pode mover-se e orientar-se livremente no espaço 3D. Os eixos de movimento e revolução nas articulações e nos manipuladores são ortogonais e concorrentes.
Como pode ser visto nas figuras 6 (a) e 7 (a), a arquitetura do simulador pode ser implementada de maneiras diferentes. O modelo na figura 7 é mais forte e mais preciso. O primeiro é projetado para se adequar ao estudo do efeito das expressões faciais na comunicação, enquanto o último foi desenvolvido para terapia da fala.
O modelo para estudar o efeito das expressões faciais na comunicação é constituído por mesas XY feitas de alumínio, com duas guias lineares de aço inoxidável. Os slides deslizam pelas guias lineares e são acionados por quatro motores (Maxon DC) com engrenagens. O binário dos motores é transmitido para os slides, com o auxílio a polias e correias. Para evitar que os motores verticais movam o peso de outros motores, os controles deslizantes horizontais são equipados com um conjunto de engrenagens telescópicas, figura 6 (b).
Para mover a mandíbula lateralmente, a base do guia de centralização é montada num slide de rolo transversal motorizado que permite 6,35 mm de movimento em ambas as direções, isto é mais de seis vezes o limite humano.
Finalmente, para registrar o deslocamento da ATM, usaram-se codificadores incrementais nos motores de acionamento e nas juntas do simulador (seis no total). Para gravar a posição inicial da ATM. Cada DOF é equipado com um interruptor de contato calibrado.
Figura 6-Simulador Antropomórfico primeiro modelo (a) Layout do simulador (b) Efeito final e conjunto de engrenagens telescopias. [6]
O modelo para ajudar na terapia da fala é constituído por mesas XY, com fusos de esferas acoplados aos motores. A fim de obter movimento rotativo e transmitir binário para as articulações
organizou-se parte do mecanismo na configuração de aperto do torno, como é mostrado na figura 7 (b).
Neste modelo foram utilizados seis motores (Maxon DC) de 11W. Cada um gira um fuso de esferas, enquanto as porcas convertem o movimento rotativo em movimento linear. O binário dos motores é transferido para os fusos de esferas por meio de pares de engrenagens retas. Alimentado com 15V o simulador pode mover a prótese em qualquer direção a velocidades máximas de 236 mm / s.
Usaram-se juntas universais de folga zero e fusos de esferas telescópicas, bem como rolamentos e eixos de precisão para a guia de centralização e da articulação axial. Além disso, montou-se em cada DOF lâminas de rolos cruzados de alta precisão. A mandíbula pode abrir sem restrição 32º. Pode-se mover 25,4 mm na vertical e na horizontal e 6,35 mm lateralmente [6].
Para registrar a posição da ATM, este modelo usa o mesmo tipo de codificadores óticos que o modelo da figura 6.
Figura 7- Simulador Antropomórfico segundo modelo (a) Layout do simulador (b) Mecanismo de amplificação do binário. [6]
2.2.5 Simulador de mastigação
Este simulador tem com o objetivo simular o processo de mastigação, com a finalidade de estudar os movimentos e as forças. O mecanismo utilizado é de acionamento paralelo, que tem seis atuações (junta prismática, junta universal e junta esférica) e dois pares cinemáticos mais elevados nos pontos de contacto. O movimento e as forças do simulador são determinados através das cinemáticas inversa e análise da força estática. Os músculos mais importantes neste estudo foram o masséter, temporal e o pterigoide lateral, pois são estes os principais responsáveis pelo abertura e fecho da mandíbula. O simulador tem 4 graus de liberdade que são acionados por seis ligações independentes.
Os movimentos da mandíbula são caraterizados em três ciclos de mastigação que são a abertura posterior extrema, o fecho anterior extremo e deslize superior máximo. Em média, os
maiores deslocamentos máximos na mastigação são 33, 10 e 16 mm das direções verticais, protrusões e laterais, respetivamente. Assim, as gamas de movimento do incisivo do robô de mastigação foram especificadas como 40, 12 e 20 mm, respetivamente. A figura 8 representa os movimentos da mandíbula durante a mastigação [7].
Figura 8- Movimentos da mandíbula durante a mastigação [7]
A trajetória Pclosed - A - B - C - Pclosed - D - C - E - Pclosed representa os três ciclos de mastigação e tem uma duração de 1,36s. Nesta trajetória o deslocamento máximo, velocidade e aceleração encontrados para todas as juntas prismáticas são 45 mm, 250 mm/s e 2778 mm/s2,
respetivamente. Os ângulos de trabalho máximos para juntas universais e articulações esféricas são 24 e 30 graus, respetivamente. Verificou-se por meio da análise de força estática, que a força máxima de 450N é o suficiente para acionar a junta prismática, com um fator de segurança adequado.
O movimento mandibular ocorre como uma série complexa de três atividades de rotação e translação, que estão relacionadas entre si. A rotação ocorre quando a boca se abre e fecha em torno de um ponto, eixo dentro dos côndilos. Tipicamente, existem três tipos de rotação: a rotação do eixo horizontal, do eixo vertical e do eixo sagital, como mostrado na figura 9 (a). O movimento de translação ocorre quando a mandíbula se move para a frente, como se verifica na figura 9 (b). Os dentes, côndilos e mandíbula movem-se na mesma direção e velocidade. Em geral, a mastigação envolve ambos os movimentos de rotação e translação em simultâneo e compreende mais do que dois tipos de movimentos de rotação.
Figura 9- Movimento mandibular (a) Movimento de rotação da mandíbula (b) Movimento de translação da mandíbula
[8]
Para simular a trajetória de mastigação utilizou-se um robô de mastigação. Este robô é constituído por um servomotor rotativo (binário nominal de 0,64 Nm e velocidade de 3000 rpm), um fuso de esferas, uma guia, uma junta universal, uma haste, um conjunto de suporte e placas esféricas. A figura 10 (a) representa a estrutura final do robô de mastigação e a figura 10 (b) representa a estrutura dos atuadores do robô, onde no lado esquerdo está representado o desenho em SolidWorks e no lado direito a construção final [7].
Figura 10- Robô de mastigação (a) Estrutura final do robô de mastigação (b) Estrutura dos atuadores do robô [7]
Este simulador compara a sua trajetória com a trajetória efetuada pelos humanos. O movimento mandibular é medido pelo simulador kinesiograph mandibular (MCG JT – 3D), figura 11, que converte a variação magnética em sinais elétricos pelos sensores magnéticos, reproduzindo os movimentos da mandíbula eletronicamente. Neste artigo participaram dez adultos saudáveis com oclusão normal. Fizeram três movimentos funcionais básicos em sequência, que foram o movimento de abertura, o movimento protrusão e movimento lateral. Como existem inúmeras curvas para alcançar a posição máxima dentro do espaço do movimento da mandíbula, a trajetória pode variar a cada vez que eles fazem o mesmo movimento [8].
Figura 11- Simulador MCG JT -3D do BioResearch Companhia TM [8]
Da figura 12 à figura 14 é representada a medição dos movimentos da mandíbula em três adultos. Eles fornecem os movimentos incisivos inferiores mandibulares tridimensionais. As distâncias de três movimentos funcionais básicos, incluindo o movimento de abertura, o movimento protrusão e o movimento lateral, são marcados nas figuras. Em comparação, as trajetórias de cada assunto são diferentes, mesmo que eles são convidados a fazer o mesmo movimento.
Figura 12- Medição dos movimentos da mandíbula do adulto 1[8]
Figura 13- Medição dos movimentos da mandíbula do adulto 2 [8]
Figura 14- Medição dos movimentos da mandíbula do adulto 3 [8]
Todos os valores dos adultos foram recolhidos e os seus valores máximos limitam o espaço de movimento da mandíbula. Os dados medidos estão listados na tabela 2. Os principais fatores que podem ter uma grande influência sobre os valores máximos medidos são o tamanho da mandíbula e da ATM.
Tabela 2- Medição dos movimentos da mandíbula dos 10 adultos [8]
Adulto Movimento Vertical
máximo (mm) Movimento Lateral máximo (mm) Movimento Protrusão máximo (mm) 1 37.7 10.6 12.2 2 35.3 30.0 7.5 3 29.7 21.4 6.9 4 38.2 23.4 11.1 5 30.9 11.4 6.1 6 42.6 18.2 10.3 7 33.2 14.2 8.9 8 39.0 15.2 7.6 9 35.2 12.4 13.0 10 36.8 24.2 10.1
O teste de movimento é realizado no robô de mastigação que é proposto com base na constatação biológica sobre o sistema de mastigação e suas características de movimento. As trajetórias do ponto incisivo inferior são extraídas como é mostrado na figura 15. O robô de mastigação pode alcançar qualquer ponto dentro do espaço de movimento da mandíbula. Comparando com os resultados medidos pelo simulador kinesiograph mandibular, a conclusão deste artigo é que o robô de mastigação pode alcançar qualquer ponto do movimento da mandibula de um ser humano. O robô de mastigação pode abrir a boca 52 mm, avançar 20 mm, e mover para a esquerda ou para a direita 18 mm. Estes valores são superiores ao normal de um ser humano [8].
2.2.6 Simulador da Universidade de Aveiro
No Laboratório de Biomecânica de Departamento de Engenharia Mecânica da Universidade de Aveiro existe um simulador da ATM. Este simulador é constituído por dez músculos pneumáticos fabricados pela FESTO que permitem recriar as dez ações musculares consideradas mais importantes para o correto funcionamento desta articulação.
Para a instrumentação são utilizadas 10 células de carga aplicadas aos músculos pneumáticos, permitindo assim a medição das forças musculares do simulador. O sistema de controlo é composto por um controlador em tempo real CompactRIO que foi programado recorrendo às plataformas de software, LabVIEW e MATLAB. Nestas plataformas foram criadas diversas aplicações que permitem o controlo e monitorização dos ensaios realizados pelo simulador. As aplicações desenvolvidas recorrendo ao MATLAB são as responsáveis pela correta configuração dos ensaios a realizar. As aplicações desenvolvidas em LabVIEW são responsáveis pela operação e monitorização do simulador. Nestas aplicações, também são implementados os controladores de força para os diversos músculos. O diagrama que representa a arquitetura de software acima descrita pode ser analisado na figura 16 [1].
Figura 16- Diagrama de software do simulador [1]
Na dissertação de Tiago Rodrigues (2017)[2] este simulador foi utilizado para estudos da ATM. O simulador estático-dinâmico no qual foram efetuados os testes com os valores obtidos nas simulações feitas no modelo computacional encontra-se representado na figura 17.
Figura 17- Aparelho de teste [2]
2.3 Análise aos simuladores
Neste subcapítulo é apresentada uma comparação dos simuladores descritos anteriormente. Os simuladores apresentam várias soluções de atuação e instrumentação. As atuações apresentadas são pneumática, hidráulica e elétrica.
A tabela 3 é representada a comparação entre os tipos de atuação.
Tabela 3- Características dos tipos de Atuação
Características Pneumático Elétrico Hidráulico
Força Média Média Alta
Velocidade Alta Alta Média
Controlo de posição Existe Existe Existe
Controlo de velocidade Não Existe Existe Existe
Precisão Baixa Alta Alta
Hardware Alto Médio Alto
Custo Baixo Médio Alto
Os sistemas de atuação existentes nos simuladores são os seguintes: • Atuadores elétricos Lineares
o Simulador Dento-Munch o Simulador Antropomórfico • Motores de passo
o Simulador Bristol BITE Master II
o Simulador da movimentação da mandíbula humana • Servomotores
• Músculos pneumáticos
o Simulador da Universidade de Aveiro
Na tabela 4 pode-se observar a comparação dos simuladores descritos anteriormente.
Tabela 4- Comparação dos simuladores
Simulador Tipo de Atuação
Nº de Ações Musculares
Instrumentação
Simulador Bristol BITE Master II Motores de passo 3 4 células de carga
Simulador Dento-Munch Atuadores elétricos
lineares 6
1 transdutor de força por dente
Simulador da movimentação da
mandíbula humana Motores de passo 3
-Simulador Antropomórfico Atuadores elétricos
lineares 6
Codificadores incrementais
Simulador de Mastigação Servomotores DC 6 -
Simulador da Universidade de
Capítulo 3
Componentes do Simulador
Neste capítulo descreve-se os componentes existentes no simulador presente no laboratório de Biomecânica da Universidade de Aveiro, uma vez que estes componentes vão ser utilizados para implementar a solução do posicionador da mandíbula.
3.1 Controlador
O controlador é um chassi CompactRIO 9074 da National Instruments, figura 18. É constituído por um processador industrial de 400 MHz, FPGA com Gate de 2M, DRAM de 128MB, armazenamento de 512 MB e tem disponíveis 8 slots para módulos.
Figura 18- Chassi CompactRIO 9074 [9]
3.2 Músculos pneumáticos
Os músculos pneumáticos são responsáveis pela representação muscular do simulador. Neste simulador existem dois tipos de músculos: 7 longos e 3 curtos. A diferença destes músculos é amplitude de movimento que permitem realizar, figura 19.
Os músculos utilizados são da marca Festo, modelos 40N-AM-AM e DMSP-10-80N-AM-AM. A tabela 5 apresenta as características principais destes músculos.
Tabela 5- Características dos músculos [10]
Característica Músculo curto Músculo
longo Unidade de medida
Comprimento nominal 40 80 mm
Contração máxima 10 20 mm
Carga suspensa máxima 30 30 Kg
Força máxima 630 630 N
Pressão de funcionamento 0-8 0-8 bar
3.3 Válvulas reguladoras de pressão
As 10 válvulas reguladoras de pressão proporcionais utilizadas têm a referência VPPM-6F-L-1-F-OL6H-A4P-C1 da marca Festo, figura 20.
Figura 20- Válvulas reguladoras de pressão proporcionais [11]
Estas válvulas têm como função a regulação da pressão do ar na atuação dos músculos pneumáticos. Estas válvulas aumentam a pressão nos músculos com o aumento do sinal elétrico. A tabela 6 apresenta as principais características destas válvulas.
Tabela 6- Características das válvulas reguladoras de pressão proporcionais [11]
Características Valor Unidade de medida
Vias 3 -
Pressão de funcionamento 6 bar
Alimentação 24 V
3.4 Conversores Tensão-Corrente
Os 10 conversores utilizados neste simulador são do fabricante SENECA, modelo K109UI, figura 21.
Figura 21- Conversores tensão-corrente [12]
Estes conversores têm como função a conversão da tensão de saída do módulo NI 9264 em corrente para atuar as válvulas reguladores de pressão. A tabela 7 apresenta as características deste conversor.
Tabela 7- Características dos conversores tensão-corrente [12]
Características SENECA K109UI Unidade de medida
Tensão de alimentação 24 Vdc
Intervalo de entrada 0-5 V
Intervalo de saída 4-20 mA
3.5 Módulo de saída analógico
O módulo de saída analógico utilizado foi o NI 9264 da National Instruments, figura 22.
Figura 22- Módulo de saída analógico NI 9264 [13]
Este módulo aplica uma tensão à entrada dos conversores de corrente. As principais características estão ilustradas na tabela 8.
Tabela 8- Características do módulo de saída analógico NI 9264 [13]
Características NI 9264 Unidade de medida
Canais 16 -
Intervalo de saída ± 10 V
Amostragem 25 KS/s
Resolução 16 bits
Corrente máxima por canal 4 mA
3.6 Módulos de Aquisição de dados
Os três módulos de aquisição de dados utilizados foram os NI 9237 da National Instruments, figura 23.
Figura 23- Módulos de aquisição de dados NI 9237
Estes módulos são responsáveis pela leitura de dados provenientes das 10 células de carga, que estão aplicadas nos músculos pneumáticos. As principais características estão representadas na tabela 9.
Tabela 9- Características dos módulos de aquisição de dados NI 9237
Características NI 9237 Unidade de medida
Canais 4 -
Intervalo de leitura ± 25 mV/V
Amostragem 50 KS/s
Resolução 24 bits
Tensão de Excitação Até 10 V
3.7 Células de carga
As 10 células de carga utilizadas são da HBM, modelo U9B, figura 24.
A função destas células é adquirir os dados das forças exercidas pelos músculos pneumáticos. A tabela 10 ilustra as principais características da célula de carga.
Tabela 10- Características da célula de carga HBM U9B [14]
Característica HBM U9B Unidade de medida
Força nominal 0.5 kN Classe de precisão 0.5 - Tensão de excitação 5 V Sensibilidade 1 mV/V Linearidade ≤ ± 0.5 %
3.8 Plataforma Mecânica
Na plataforma, figura 25, é onde se fixa os músculos pneumáticos, as células de carga e um sistema de guias e cordas. A estrutura é feita em alumínio e tem partes móveis protegidas por placas de acrílico, permitindo a visualização dos músculos pneumáticos, com o objetivo de verificar o seu correto funcionamento e sua segurança.
Figura 25- Plataforma mecânica [1]
Nesta plataforma os 10 músculos estão distribuídos em duas colunas de igual forma. Os 3 músculos superiores de cada coluna são músculos curtos e os restantes músculos são longos. A figura 26 representa essa distribuição.
Figura 26- Distribuição dos músculos [1]
3.9 Estado do Simulador
O simulador encontra-se com o hardware mecânico, eletrónico e pneumático corretamente montado, e pronto para reproduzir as dez ações musculares da ATM.
O software foi desenvolvido no âmbito de uma dissertação de mestrado realizado em 2016 [1] e consiste em criar aplicações em MATLAB e LabVIEW que permitem simular as ações musculares da ATM no simulador. As aplicações desenvolvidas recorrendo ao MATLAB são as responsáveis pela correta configuração dos ensaios a realizar. As aplicações desenvolvidas em LabVIEW são responsáveis pela operação e monitorização do simulador. Nestas aplicações, são também implementados os controladores de força para os diversos músculos. A figura 27 representa o estado do simulador na data do início desta dissertação.
Figura 27- Simulador da Universidade de Aveiro
O trabalho associado a esta dissertação é a atualização do simulador com um mecanismo posicionador de 3 eixos. Esta atualização torna este simulador bastante completo no estudo da ATM.
Capítulo 4
Posicionador de 3 eixos
Neste capítulo descreve-se as especificações do mecanismo posicionador de 3 eixos e também as atualizações do hardware que foram necessárias efetuar no simulador.
4.1 Especificações
Esta estrutura tem como objetivo posicionar a mandibula durante a trajetória na mastigação. A trajetória da mastigação está representada na figura 8. Os valores máximos da trajetória são os seguintes:
• Vertical (eixo Z) = 50 mm; • Horizontal (eixo Y) = 20mm; • Horizontal (eixo X) = 25mm.
Para cada eixo X, Y e Z existem 3 estruturas lidadas entre si. Como os movimentos de posicionamento da mandíbula têm de ser bastante precisos, e os atuadores têm de ser economicamente viáveis, foram selecionados atuadores elétricos. Três tipos de atuação elétrica foram estudados para simular os movimentos da estrutura:
• Motores de passo; • Motores DC; • Servomotores;
Os motores de passo são atuadores de precisão e de binário. A figura 28 representa de uma forma simplista o funcionamento dos motores de passo.
Figura 28- Layout dos motores de passo
A vantagem da utilização destes atuadores é que estes permitem implementar um posicionador em malha aberta não necessitando de sensor de posição. Esta implementação leva a uma redução de custo em relação aos outros atuadores elétricos.
O motor DC necessita de ser controlado em malha fechada para servir como posicionador. Tipicamente a velocidade do motor é dependente da tensão aplicada no motor. Como se pretende um posicionador é necessário um sensor de posição e um sistema de controlo em malha fechada para garantir a trajetória desejada de posição. Esta necessidade implica custo e complexidade acrescida para o posicionador.
Os servomotores contêm um sistema de controlo interno o qual verifica a posição de entrada com a posição de saída, e também são motores de corrente contínua. E apesar de terem precisão, os servomotores não tem um binário tão elevado como os motores de passo, necessitando de uma desmultiplicação para terem binários mais elevados. Outra desvantagem em relação aos motores de passo é que apresentam um custo mais elevado.
Como os motores no posicionador tem de ser precisos e com binários relativamente elevados, nos seus movimentos utilizaram-se motores de passo. Para movimentar a estrutura nos eixos X, Y e Z é necessário estudar sistemas de movimento linear que vão estar unidos aos motores de passo. Três tipos de sistemas de movimento foram estudados nesta dissertação:
• Fuso de esferas; • Cremalheira; • Correia.
O fuso de esferas, figura 29, é um sistema redutor (diminui a velocidade e aumenta o binário do motor e vice-versa), tem boa precisão em movimento lineares e tem uma estrutura simplificada na montagem do posicionador.
Figura 29- Fuso de esferas
A cremalheira, figura 30, é um sistema redutor, tem menor precisão em sistemas lineares em relação ao fuso de esferas e torna a estrutura mais complexa na montagem do posicionador.
Figura 30- Cremalheira
A correia, figura 31, necessita de coroa ou rodas dentadas para ter um sistema redutor, e apresenta menos precisão de movimento que os sistemas anteriores.
Figura 31- Correia com rodas dentadas
Para movimentar os eixos optou-se por utilizar 3 motores de passo ligados cada um deles a um fuso de esferas de 16 mm e 2,5 mm de passo. O fuso de esferas no eixo vertical Z tem um comprimento de 200 mm, este comprimento é o suficiente para movimentar a mandíbula no espaço de trabalho vertical. Os fusos de esferas nos eixos horizontais X e Y apresentam ambos um comprimento de 150 mm, este comprimento é o suficiente para movimentar a mandíbula nos espaços de trabalho horizontais.
Dimensionaram-se os motores para uma força axial máxima na mandíbula de 500 N. Para a conversão do movimento utilizou-se um fuso de esferas com 16 mm de diâmetro e 2,5 mm de passo, acoplado ao motor. O binário do motor é determinado pela seguinte expressão:
Binário = Ftangencial * rfuso (1)
A força tangencial é determinada pela seguinte expressão:
Ftangencial = Faxial * tan(tan-1(passo/(π*diâmetro do fuso))) (2)
quando a mandíbula tem uma força mínima aplicada, que é igual a 5 N (massa da mandíbula). A velocidade mínima é igual a 0,0047 m/s, sendo esta velocidade obtida quando a mandíbula tem uma força máxima aplicada, que é igual a 500 N. Sabendo a velocidade e a força, consegue-se determinar a potência máxima que o motor necessita para acionar o posicionador em cada um dos eixos. A expressão para determinar a potência máxima é a seguinte:
Pmáx = Fmáx * vmin (3)
A potência máxima que o motor tem de fornecer é igual a 2,35W. Sabendo o binário e a potência necessária para realizar o movimento vertical da mandíbula, é preciso selecionar um motor com características capazes de realizar esta tarefa.
A instrumentação deste posicionador é uma célula de carga KYOWA, esta célula é capaz de medir as forças e momentos aplicados aos movimentos de cada eixo. A célula de carga KYOWA está fixa entre os suportes dos motores e o modelo da mandíbula. Assim a célula consegue medir as forças e os momentos em cada movimento.
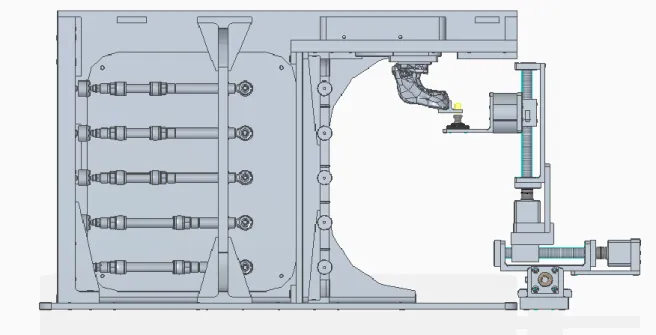
Para existir movimento rotacional foi necessário utilizar uma articulação esférica fixa à mandíbula. O movimento rotacional só ocorre quando existe atuação simultânea entre os motores e os músculos pneumáticos. A figura 32 representa o desenho 3D em SolidEdge da estrutura do mecanismo posicionador de 3 eixos de posição. A tabela 11 apresenta a legenda da figura, associando os números a cada peça.
Tabela 11- Legenda do posicionador de 3 eixos
Número Peça Quantidade
1 Suportes eixos horizontais 2
2 Motores 3
3 Acopolador mecânico 3
4 Variantes de porcas esféricas 3
5 Fusos de esferas horizontais 2
6 Encaixe na mesa 1 1
7 Suporte para o motor da base 1
8 Encaixe na mesa 2 1
9 Rolamentos 6
10 Tampa para os rolamentos 5
11 Suporte dos motores X,Z peça 1 2
12 Suporte dos motores X,Z peça 2 2
13 Encaixe do suporte vertical 1
14 Fuso de esferas vertical 1
15 Suporte eixo Vertical peça2 1
16 Suporte eixo Vertical peça1 1
17 Suporte para célula de carga 1
18 Célula de Carga 1
19 Suporte para a flange com junta
esférica 1
20 Flange com articulação esférica 1
21 Encaixe da mandíbula 1
Com a utilização do SolidEdge foi possível desenhar a representação do simulador da Universidade de Aveiro com a atualização do posicionador de 3 eixos de posição, figura 33.
4.2 Atualização do Hardware
4.2.1 Motores de passo
Os motores de passo utilizados nos sistemas XYZ da estrutura de posicionamento da mandíbula foram os STA-4118 da Nanotec, figura 34. Estes motores são equivalentes aos Nema 17.
Figura 34- Motores de passo
A tabela 12 apresenta as características do motor. Para as ligações elétricas do motor utilizaram-se 4 condutores de acionamento dos enrolamentos (A+ A- B+ B-) e dois condutores de alimentação.
Tabela 12- Características dos motores de passo
Características Unidades
Binário máximo 0.28Nm
Corrente por enrolamento 1.5A
Resistência por enrolamento 1.1Ω
Indutância por enrolamento 1.85mH
Inércia do Rotor 57g/cm2
Peso 0.24Kg
4.2.2 Driver
Para controlar cada motor de passo é necessário utilizar drivers de motores de passo. Foram utilizados 3 drivers TB6600 da Toshiba, figura 35.
Figura 35- Driver utilizado no hardware
A tabela 13 apresenta as características dos drivers.
Tabela 13- Características do driver [15]
Características Unidades
Corrente de entrada 0 ~ 5A
Corrente de saída 0.5-4A
Potência máxima 160W
Tensão de alimentação 9 ~ 42V
4.2.3 Módulo de Saída digital
Para acionar os drivers é necessário utilizar duas cartas NI 9472 da National Instruments de saídas digitas, figura 36.
A tabela 14 apresenta as suas características.
Tabela 14- Características do módulo NI 9472 [16]
Características Unidades
Quantidade de saídas digitais 8
Níveis lógicos das E/S digitais 12V-24V
Taxa máxima de atualização 100 µs
Direção do fluxo de corrente Saída em fonte (source)
Isolação das E/S digitas 250 Vrms isolação entre canais e terra
4.2.4 Ligações de acionamento dos motores de passo
As ligações entre a carta NI-9472, o driver e respetivo motor estão representadas na figura 37.
Figura 37- Ligações entre a carta NI-9472, o driver e respetivo motor [15]
As resistências R têm de ser iguais a 2,2kΩ, pois a tensão à saída do módulo NI-9472 é igual a 24V. As entradas ENA do driver servem para ativar/desativar o controlo do motor. As entradas DIR são responsáveis pelo controlo da direção do motor, ou seja, se a saída digital da carta NI-9472 estiver ativa, o motor tem uma rotação horária, se a saída estiver desativa o motor tem rotação anti-horário. As entradas PUL controlam o posicionamento do motor e sua velocidade, pois essa entrada recebe os pulsos por segundo (PPS) a que o motor deve rodar. Para calcular a velocidade RPM do motor é necessário utilizar a seguinte equação:
RPM = (PPS * 60) / PPR (4)
Os pulsos por rotação (PPR) são definidos pelo utilizador, pois este driver tem interruptores (S1, S2 e S3) que permitem definir os pulsos por rotação do motor. A tabela 15 representa os PPR disponíveis neste driver:
Tabela 15- PPR disponíveis neste driver [15]
Como a corrente de saída máxima dos drivers é de 4 A e a corrente por enrolamento dos motores é de 1.5A, é necessário definir as correntes de saídas adequadas do driver para ser compatível com a corrente do motor. Para isso este driver tem mais 3 interruptores (S4, S5 e S6) que permitem definir essa corrente. A tabele 16 representa as correntes de saída disponíveis neste driver.
Tabela 16- As correntes de saída disponíveis neste driver [15]
4.2.5 Módulo de aquisição de dados
O módulo de aquisição de dados provenientes da célula de carga utilizado foi o NI 9201 da National Instruments, figura 38.
Este módulo é responsável pela leitura de dados provenientes da célula de carga KYOWA. As principais características estão representadas na tabela 17.
Tabela 17- Características do módulo NI 9201[17]
Características NI 9201 Unidade de medida
Canais 8 -
Níveis de sinal ± 10 V
Amostragem 500 KS/s
Resolução 12 bits
4.2.6 Célula de carga KYOWA
A função desta célula é adquirir os dados das forças e dos momentos exercidos pela estrutura mecânica no movimento da mandíbula nos eixos XYZ, figura 39.
Figura 39- Célula de carga KYOWA [18]
A tabela 18 ilustra as principais características da célula.
Tabela 18- Característica da célula de carga KYOWA [18]
Características LFX-A-1KN Unidade de medida
Canais 6 -
Alimentação +5 V
Tipo da saída 0-5 V
Força Máxima (Fx, Fy, Fz) 1 KN
Momento máximo (Mx, My) 40 Nm
Momento máximo (Mz) 25 Nm
Frequência de resposta 500 Hz
4.2.7 Alimentação da célula de carga
A célula de carga tem que ser alimentada com uma tensão igual a 5V. Como a alimentação do quadro elétrico é de 24V, foi necessário construir um regulador de tensão que tenha 24V de entrada
e 5V de saída. Na dissertação [1] foi construído um circuito elétrico utilizando um regulador de tensão LM317HV da Texas Instruments. A figura 40 representa o circuito eletrónico do regulador LM317HV.
Figura 40- Circuito eletrónico do regulador LM317HV [1]
Ao testar este regulador verificou-se que existia um aquecimento muito elevado no regulador. Para não danificar a célula de carga foi necessário recorrer a outra solução. A outra solução foi utilizar um regulador de tensão 7805. Este regulador tem uma corrente de saída de 1A, que é muito superior à corrente necessária à célula de carga. Apresenta também uma tensão de entrada máxima de 25V e uma tensão de saída de 5V. A figura 41 representa o circuito eletrónico do regulador 7805.
Figura 41-Circuito eletrónico do regulador 7805 [19]
Ao testar este regulador verificou-se o mesmo problema do regulador LM317HV. Mesmo tendo uma corrente de saída elevada, este regulador apresentou um elevado aquecimento.
A última solução utilizada foi ligar diretamente a célula de carga a uma fonte de tensão externa, figura 42, que tenha 5V numa das suas saídas.
Figura 42- Fonte de alimentação externa
4.3 Montagem do Posicionador
Para a construção do posicionador foi necessária a maquinação de algumas peças. Os desenhos técnicos que estão nos anexos foram fundamentais para a maquinação.
Depois de maquinadas todas as peças e adquiridos todos os materiais necessários começou-se a montagem do posicionador. Começou-se por encaixar todos os fusos de esferas nas variantes de porcas esféricas. De seguida colocaram-se os rolamentos nos fusos e depois encaixou-se tudo nos suportes respetivos. A figura 43 representa o suporte com o fuso de esferas montado.
Figura 43- Suporte com o fuso de esferas montado
O próximo passo foi montar os motores com os suportes para os mesmos. Por fim uniram-se os suportes com os motores aos suportes com os fusos. A figura 44 representa os eixos X, Y e Z montados.
Figura 44- Montagem dos eixos do simulador (a) Montagem do eixo X (b) Montagem do eixo Y (c) Montagem do eixo Z
Com a montagem dos eixos concluída, passou-se para montagem da célula de carga e respetivos suportes, figura 45.
Figura 45- Montagem da célula de carga e respetivos suportes
A tarefa seguinte é a colagem da articulação esférica com o encaixe na mandíbula, figura 46.
Figura 46- Colagem da articulação esférica com o encaixe na mandíbula
Figura 47- Montagem do posicionador completa
4.4 Estado do Simulador
No final deste capítulo o simulador encontra-se com o hardware mecânico, eletrónico e pneumático corretamente montado, e pronto para reproduzir as dez ações musculares e o posicionamento da ATM. A figura 48 representa o estado do simulador no final da dissertação.
Capítulo 5
Aplicações de Operação e Monitorização
Ao longo deste capítulo vai ser descrito o processo de desenvolvimento das trajetórias do mecanismo posicionador de 3 eixos de posição criadas em MATLAB e do projeto LabVIEW que é responsável pela operação e monitorização do simulador.5.1 Arquitetura do Software
Inicialmente foram estabelecidas as cinemáticas direta e inversa do posicionador 3D. Definida a trajetória desejada em 3D foi utilizado o MATLAB para gerar as trajetórias 2D individuais para cada atuador.
A atuação dos motores (envio de sinais PWM para os drivers) foi implementada em LabVIEW, pois todo o sistema de IO bem como o módulo processador são hardware da National Instruments.
Ao executar a trajetória, o posicionador gera dados de força e momentos, que são adquiridos pela aplicação de monitorização implementada em LabVIEW. Por fim são processados e armazenados por uma aplicação desenvolvida em MATLAB.
O diagrama que representa a arquitetura de software acima descrita pode ser analisado na figura 49.
Figura 49- Diagrama de software
5.2 Programação em MATLAB
Neste subcapítulo vai ser descrita a programação da trajetória da mandíbula na mastigação. Criou-se também um programa que lê os dados da célula de carga KYOWA proveniente do software LabVIEW nesta programação utilizou-se a ferramenta graphical user interface (GUI) do MATLAB.
5.2.1 Cinemática do Posicionador
Nesta secção descreve-se a implementação de um ensaio com o posicionador a executar uma determinada trajetória 3D.
A parte inicial deste programa foi a construção gráfica dos elos do simulador. Para programar a construção gráfica é necessário seguir as regras do algoritmo de Denavit-Hartenberg para um manipulador com n juntas. Estas regras estão ilustradas na figura 50.
Figura 50- Regras do algoritmo de Denavit-Hartenberg para um manipulador com n juntas [20]
O mecanismo posicionador de 3 eixos de posição é um robô com 3 juntas prismáticas. A figura 51 apresenta o posicionador com os elos das juntas prismáticas identificados.
Figura 51- Posicionador com os elos das juntas prismáticas identificados
A tabela 19 representa os valores de Denavit-Hartenberg.
Tabela 19- Valores de Denavit-Hartenberg
Elo i Ө L (mm) D (mm) α
1 0º 0 d0 -90º
2 -90º 0 d1 90º
3 90º 0 d2 0º
4 0º 138 0 0º
Para verificar se a construção gráfica dos elos do simulador foi realizada corretamente foram utilizadas funções programadas em MATLAB. Depois de ter a cinemática direta representada é necessário determinar as matrizes de transformação geométrica associada a um elo i. Para representar as matrizes é preciso seguir a seguinte regra, figura 52.
![Figura 9- Movimento mandibular (a) Movimento de rotação da mandíbula (b) Movimento de translação da mandíbula [8]](https://thumb-eu.123doks.com/thumbv2/123dok_br/16116689.1108622/31.892.320.600.124.550/movimento-mandibular-movimento-rotação-mandíbula-movimento-translação-mandíbula.webp)
![Figura 10- Robô de mastigação (a) Estrutura final do robô de mastigação (b) Estrutura dos atuadores do robô [7]](https://thumb-eu.123doks.com/thumbv2/123dok_br/16116689.1108622/32.892.270.639.131.397/figura-robô-mastigação-estrutura-final-mastigação-estrutura-atuadores.webp)
![Figura 12- Medição dos movimentos da mandíbula do adulto 1[8]](https://thumb-eu.123doks.com/thumbv2/123dok_br/16116689.1108622/33.892.172.789.127.409/figura-medição-dos-movimentos-da-mandíbula-do-adulto.webp)
![Tabela 2- Medição dos movimentos da mandíbula dos 10 adultos [8]](https://thumb-eu.123doks.com/thumbv2/123dok_br/16116689.1108622/34.892.131.789.157.467/tabela-medição-dos-movimentos-da-mandíbula-dos-adultos.webp)
![Figura 16- Diagrama de software do simulador [1]](https://thumb-eu.123doks.com/thumbv2/123dok_br/16116689.1108622/35.892.322.615.585.954/figura-diagrama-de-software-do-simulador.webp)
![Figura 17- Aparelho de teste [2]](https://thumb-eu.123doks.com/thumbv2/123dok_br/16116689.1108622/36.892.270.677.129.406/figura-aparelho-de-teste.webp)

![Figura 37- Ligações entre a carta NI-9472, o driver e respetivo motor [15]](https://thumb-eu.123doks.com/thumbv2/123dok_br/16116689.1108622/53.892.180.734.485.867/figura-ligações-entre-carta-ni-driver-respetivo-motor.webp)
![Figura 40- Circuito eletrónico do regulador LM317HV [1]](https://thumb-eu.123doks.com/thumbv2/123dok_br/16116689.1108622/56.892.299.643.222.499/figura-circuito-eletrónico-do-regulador-lm-hv.webp)
