Universidade Federal da Para´ıba
Centro de Ciˆencias Exatas e da Natureza
Programa de P´
os-Gradua¸c˜
ao em Matem´
atica
Curso de Mestrado em Matem´
atica
C´
alculo das Retas numa Superf´ıcie
C´
ubica em
P
3
Geraldo de Assis Junior
Universidade Federal da Para´ıba
Centro de Ciˆencias Exatas e da Natureza
Programa de P´
os-Gradua¸c˜
ao em Matem´
atica
Curso de Mestrado em Matem´
atica
C´
alculo das Retas numa Superf´ıcie
C´
ubica em
P
3
por
Geraldo de Assis Junior.
sob orienta¸c˜ao de
Prof
a. Dra Jacqueline Fabiola Rojas Arancibia
A848c Assis Junior, Geraldo de.
Cálculo das retas numa superfície cúbica em P3 / Geraldo de Assis Junior. - - João
Pessoa : [s.n.], 2011. 55 f. il.
Orientadora: Jacqueline Fabíola Rojas Arancíbia. Dissertação (Mestrado) – UFPB/CCEN.
1.Matemática. 2.Superfície Cúbica. 3.Contagem das Retas. 4.Espaço Projetivo.
Universidade Federal da Para´ıba
Centro de Ciˆencias Exatas e da Natureza
Programa de P´os-Gradua¸c˜ao em Matem´atica
Curso de Mestrado em Matem´atica
C´
alculo das Retas numa Superf´ıcie C´
ubica em
P
3por
Geraldo de Assis Junior
Disserta¸c˜ao apresentada ao Departamento de Matem´atica da UFPB como requisito para a obten¸c˜ao do grau de Mestre em Matem´atica.
´
Area de Concentra¸c˜ao: ´Algebra
Aprovada por:
Profa
. Dra. Jacqueline Fabiola Rojas Arancibia - UFPB (Orientadora)
Prof. Dr. Andr´e Luiz Meireles Araujo - UFPE
Agradecimentos
`
A UFPB por ter me acolhido no programa de p´os-gradua¸c˜ao em matem´atica.
Aos meus pais, pelo apoio e incentivo em todos momentos da minha vida possibilitando a concretiza¸c˜ao deste sonho.
`
As minhas irm˜as, Selma, Gelly e Lili, pelo carinho e por todos os momentos de alegria que revigoravam minhas energias na luta pelo objetivo final.
`
A minha orientadora Jacqueline Rojas, pela paciˆencia, confian¸ca e motiva¸c˜ao sem os quais n˜ao teria realizado este trabalho.
Aos professores Jacqueline, Andrade, Everaldo, Lisandro e Fagner n˜ao s´o pelo conhe-cimento adquirido mas tamb´em pelo exemplo de bons profissionais.
Aos professores Roberto Bedregal e Andr´e Luiz, por terem aceitado participar da banca.
Resumo
Neste trabalho estudamos as superf´ıcies c´ubicas em P3. Mais precisamente, nos preo-cupamos em contabilizar o n´umero de retas sobre estas superf´ıcies. No cap´ıtulo um provamos o conhecido resultado que afirma que o n´umero de retas sobre uma superf´ıcie c´ubica n˜ao singular em P3 ´e 27. No cap´ıtulo dois, como motiva¸c˜ao para o cap´ıtulo trˆes, ´e abordada a classifica¸c˜ao das singularidades de curvas planas. Para o caso singular, abordado no cap´ıtulo trˆes, utilizamos dois algoritmos para contar as retas. O primeiro consiste em dividir as retas em seis pacotes, que na verdade s˜ao os abertos que cobrem a grassmanniana G(2,4), e em cada pacote contamos as retas que est˜ao sobre a superf´ıcie dada. O segundo algoritmo consiste em dividir as retas sobreS em dois pacotes: O pacote das retas que passam por P e o pacote das retas que n˜ao passam por P, sendo P uma singularidade isolada da superf´ıcie em quest˜ao.
Abstract
In this work we study cubic surfaces in P3. More specifically, we take care to count the number of lines on these surfaces. In chapter one we proved that the number of lines on a non-singular cubic surface in P3 is 27. In chapter two, as the motivation for chapter three, we focused in the classification of singularities of plane curves. For the singular case, discussed in chapter three, we used two algorithm to compute the number of lines. The first one consists in to divide the computation in six packages, which are actually the open set of the grassmannianG(2,4), and in each open set we count the lines contained on the given surface. The second algorithm consists of dividing the lines on S
in two packages: The package of lines passing through P and those lines that not passing through P but they are contained in a plane that contain some line passing through P, here P is an isolated singularity of the given surface.
Sum´
ario
1 Contagem das 27 Retas numa Superf´ıcie C´ubica Regular em P3 1
1.1 Um Problema de Existˆencia . . . 1 1.2 Determina¸c˜ao das 27 Retas de uma Superf´ıcie C´ubica em P3 . . . 2
2 Classifica¸c˜ao das Singularidades Isoladas Segundo Arnold (1937-2010) 5
2.1 S´eries de Potˆencia . . . 5 2.2 Classifica¸c˜ao das Singularidades das C´ubicas Planas . . . 7
3 Contagem das Retas numa Superf´ıcie C´ubica em P3 10
3.1 Caso 1: Posto de f2 ´e zero . . . 12
3.2 Caso 2: Posto de f2 ´e igual a 1 . . . 13
3.3 Caso 3: Posto de f2 ≥2. . . 22
A Resultados Preliminares 34
Introdu¸c˜
ao
Pode-se dizer que o estudo do problema de determinar o n´umero de retas sobre uma superf´ıcie projetiva nasceu de discuss˜oes entre Arthur Cayley e George Salmon. Cayley provou que uma superf´ıcie c´ubica geral cont´em um n´umero finito de retas, mas coube a Salmon provar que este n´umero ´e justamente 27. O ponto chave para demonstrar que o n´umero de retas sobre uma superf´ıcie c´ubica regular S ⊂ P3 ´e 27 consiste em verificar que S cont´em pelo menos uma reta. Feito isso, usamos um resultado que diz que dada uma reta l sobre uma c´ubica regular S existem exatamente 5 planos distintos contendo l
cuja interse¸c˜ao comS ´e igual a uni˜ao de trˆes retas. Usando este resultado sucessivamente obtemos 27 retas. O problema agora consiste em provar que estas 27 retas s˜ao duas a duas distintas e que n˜ao h´a mais retas sobre S diferentes das j´a determinadas.
De fato, se denotarmos porFk(X) a variedade de Fano formada pelosk-planos emPn
contidos na subvariedade X ⊂ Pn. No caso em que k = 1 e X ´e uma superf´ıcie c´ubica,
ent˜ao F1(X) consiste de todas as retas contidas emS, como mencionado anteriormente se
S for n˜ao singularF1(X) tem dimens˜ao zero e grau 27. Por outro lado, como veremos no
cap´ıtulo trˆes deste trabalho, se tirarmos a condi¸c˜ao deSser n˜ao singular, nos depararemos, caso F1(X) seja de dimens˜ao zero, que o cardinal deF1(X) varia entre 1 e 21. J´a no caso
de superf´ıcies de grau d >3 em P3 verifica-se que pode n˜ao conter retas.
Voltando ao estudo deF1(S) sendo S uma superf´ıcie c´ubica singular faz-se necess´ario
classificar as singularidades. Considere por exemplo a curva afim f(x, y) = 0. Se P = (a, b)∈C2 for um ponto regular o Teorema da Fun¸c˜ao Impl´ıcita nos diz que esta curva ´e o gr´afico de uma fun¸c˜ao anal´ıtica de uma vari´avel em uma vizinhan¸ca de P. Se P ´e um ponto singular o problema se complica um pouco mais. Por exemplo, a curva irredut´ıvel (x2 +y2)2 −x2 +y2 = 0 (lemniscata) possui uma singularidade na origem (0,0). N˜ao
podemos usar o Teorema da Fun¸c˜ao Impl´ıcita mas podemos utilizar o Diagrama de Newton para obter uma equa¸c˜ao local da curva, o que nos d´a (x+y)(x−y) = 0. Assim para reconhecer algebricamente a redutibilidade local de uma curva singular iremos recorrer `a extens˜ao C[[x, y]] de C[x, y]. Assim dizemos que duas hipersuperf´ıcies definidas pelos polinˆomios f, g ∈ C[z1, . . . , zr] que tˆem singularidade isolada na origem s˜ao equivalentes
se existir um isomorfismo de C-´algebras ϕ : C[[z1, . . . , zr]] −→ C[[z1, . . . , zr]] tal que
ϕ(f) = g. Com esta rela¸c˜ao de equivalˆencia Arnould classificou as singularidades de hipersuperf´ıcies nas seguintes formas normais
An zn+1
1 +
r
X
2
zi2 (n≥1) E7 z13+z1z23+
r
X
3
zi2
Dn z1n−1+z1z22+
r
X
3
zi2 (n≥4) E8 z31+z25+
r
X
3
zi2
E6 z13+z42+
r
X
3
zi2 Eb6 :z13+z23+z33+ 3λz1z2z3+
r
X
4
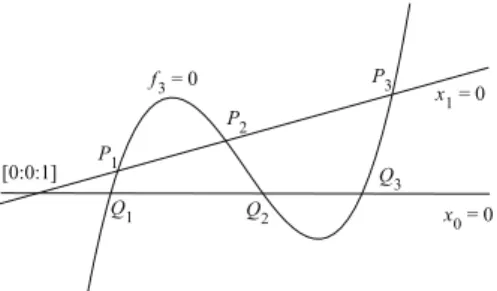
Feita esta classifica¸c˜ao podemos calcular as retas sobre uma superf´ıcie c´ubica irre-dut´ıvel singular que possui apenas pontos isolados. Usamos neste texto dois algoritmos para obter tais retas. O primeiro consiste em dividir o conjunto de todas as retas nos seis abertos que cobrem a grassmanniana G(2,4). Cada aberto determinar´a um sistema de equa¸c˜oes cujo n´umero de solu¸c˜oes ser´a igual ao n´umero de retas deste aberto conti-das em S. Para usar o segundo algoritmo considere S = Z(F), com F = x3f2 +f3 e
P = [0 : 0 : 0 : 1] ∈ Sing(S). O m´etodo consiste em calcular as retas sobre S em duas etapas. Retas que passam por P e retas que n˜ao passam porP. As retas que passam por
P est˜ao em bije¸c˜ao comf2∩f3 ⊂P2 se f2 6= 0 (Ver figura 3.1) e as retas que n˜ao passam
Cap´ıtulo 1
Contagem das 27 Retas numa
Superf´ıcie C´
ubica Regular em
P
3
Neste cap´ıtulo S ⊂ P3 denotar´a uma superf´ıcie c´ubica n˜ao singular em P3. Nosso objetivo ´e mostrar que uma superf´ıcie c´ubica n˜ao singularS ⊂P3 cont´em exatamente 27 retas.
Denotemos por R = C[x0, x1, x2, x3] o anel dos polinˆomios nas vari´aveis x0, . . . , x3 a
coeficientes emC. Para cadad≥0 inteiro sejaRdo subespa¸co vetorial deRformado pelos polinˆomios homogˆeneos de grau d. Lembremos que dimRd= 3+3d. A seguir mostremos que a c´ubica de Fermat S = Z(F) ⊂ P3 com F = x3
0 +· · ·+x23 cont´em exatamente 27
retas.
Exemplo 1.1 Considere o polinˆomioF =x3
0+x31+x32+x33 ∈C[x0, x1, x2, x3]. A superf´ıcie
c´ubica Z(F)⊂P3 cont´em exatamente 27 retas.
Tendo em considera¸c˜ao que uma retal =Z(f, g) est´a contida em Z(F) se, e somente se, F =αf +βg para algum α, β ∈R2. E usando o fato que xi3+x3j = (xi +α1xj)(xi+
α2xj)(xi+α3xj) onde αi ∈Cs˜ao as ra´ızes c´ubicas da unidade, conclu´ımos queS =Z(F)
cont´em 27 retas. Por outro lado, uma verifica¸c˜ao local, usando os abertos b´asicos Uij da grassmanniana de retas (Ver apˆendice A) nos permite concluir que S cont´em exatamente 27 retas.
1.1
Um Problema de Existˆ
encia
A seguir demonstraremos o importante fato de que toda superf´ıcie c´ubica em P3
cont´em pelo menos uma reta, este fato ser´a o ponto de partida para demonstrarmos que o n´umero de retas sobre uma c´ubica n˜ao singularS ⊂P3 ´e exatamente 27.
Teorema 1.1 Toda superf´ıcie c´ubica emP3 cont´em ao menos uma reta.
Demonstra¸c˜ao:
Considere a variedade projetiva Γ ={(l,[F]) ∈ G(2,4)×P(R3)| l ⊂ Z(F)} ⊂ P119 e
as proje¸c˜oes p1 : Γ −→ G(2,4) e p2 : Γ −→ P(R3). Note que p1 ´e sobrejetiva. Se p2 for
sobrejetiva, ent˜ao temos o resultado que buscamos. Assim, vamos supor por absurdo que
p2(Γ)( P(R3).
Sejam L1, L2 ∈ R1 linearmente independentes e l = Z(L1, L2) ⊂P3 uma reta, ´e f´acil
vetorial de R3. Nosso objetivo agora ´e calcular a dimens˜ao de Vl. Considere a aplica¸c˜ao
linear sobrejetiva ψ : R2 × R2 −→ Vl dada por (A, B) 7−→ AL1 + BL2, temos que
Ker(ψ)∼=R1. Com efeito, se (A, B)∈Kerψ, ent˜aoAL1+BL2 = 0. Logo existeA1 ∈R1
tal que A = A1L2 e B = −A1L1. Assim Ker(ψ) = {(A1L2,−A1L1)| A1 ∈ R1} ∼= R1.
Logo pelo Teorema do N´ucleo e da Imagem temos que dim(R2 ×R2) =dimR1 +dimVl,
e portanto dimVl = 16.
Agora sejal =Z(L1, L2), ent˜ao p−11 (l) ={(l,[F])| l⊂Z(F)}={l} ×P(Vl)≡P(Vl)≡
P15. Logo dimp−1
1 (l) = 15. Aplicando o Teorema da Dimens˜ao das Fibras ao morfismo
p1 : Γ−→G(2,4), temos quedimΓ−dimG(2,4) = dimp−11(l), para todal num aberto n˜ao
vazio deG(2,4). Pela proposi¸c˜ao A.6 temos quedimG(2,4) = 4. LogodimΓ = 19. Agora seja Γ1 =p2(Γ), temos da proposi¸c˜ao A.4 quedim(Γ1)<19. Seja [F]∈Γ1. Pelo Teorema
da Dimens˜ao das Fibras dimp−1
2 ([F])≥dimΓ−dimΓ1 >0. Logodimp−21([F])≥1, o que
implica que p−12 ([F]) ´e um conjunto infinito. Conclu´ımos assim que, sendo S ⊂ P3 uma superf´ıcie c´ubica n˜ao singular, ou S cont´em infinitas retas ou n˜ao cont´em retas, o que ´e uma contradi¸c˜ao, pois como vimos no exemplo 1.1 a superf´ıcie Z(x3
0+x31+x23+x33)⊂P3
cont´em exatamente 27 retas. Portanto p2 ´e sobrejetiva.
1.2
Determina¸c˜
ao das 27 Retas de uma Superf´ıcie
C´
ubica em
P
3A seguir enunciaremos trˆes lemas cujas demonstra¸c˜oes podem ser encontradas em [7] ou nas proposi¸c˜oes 4.0.2 e 4.0.3 em [1].
Lema 1.1 SejamS ( P3 uma superf´ıcie c´ubica n˜ao singular eH ⊂P3 um plano, existem
trˆes possibilidades para a curva H∩S, a saber: Uma curva c´ubica irredut´ıvel, a uni˜ao de uma cˆonica irredut´ıvel com uma reta ou trˆes retas distintas.
Lema 1.2 Sejap∈S el1, l2 el3 retas distintas em S tais que p∈l1∩l2∩l3. Ent˜aol1, l2
e l3 s˜ao coplanares.
Lema 1.3 Dada uma reta l ⊂ S existem exatamente cinco planos π1, π2, π3, π4 e π5
contendo l tais que πi∩S=l∪li∪l′
i, onde l, li e li′ s˜ao trˆes retas distintas.
Afirma¸c˜ao 1.1 Considere as retas l, l1, l′1, . . . , l5, l′5 como no lema 1.3. Ent˜ao li∩lj =
li∩l′
j =li′∩lj′ =∅.
Demonstra¸c˜ao: Provaremos apenas que li ∩lj = ∅. Os demais casos s˜ao an´alogos. Assim, suponha que exista p∈li∩lj, podemos considerar duas possibilidades.
1. p∈l. Neste caso segue do lema 1.2 quel,li e lj s˜ao coplanares. Logo πi =πj.
2. p 6∈ l. Se p 6∈ l, ent˜ao existe um ´unico plano que contem l e p. Ora, mas πi, πj
contˆem l ep. Logo πi =πj.
Demonstra¸c˜ao: O teorema 1.1 garante a existˆencia de uma reta l em S. Aplicando o lema 1.3 `a reta l obtemos 5 planos π1, . . . , π5 e 10 retas l1, l′1, . . . , l5, l′5 tais que πi∩S =
l∪li∪l′
i, como mostra a tabela 1.1. Aplicando o lema 1.3 `a reta l1 obtemos mais 8 retas
em S, m2, m′2, . . . , m′5, conforme mostra a tabela 1.2. Aplicando o lema 1.3 uma ´ultima
vez, mas agora sobre a reta l′
1, obtemos mais 8 retas em S, k2, k2′, . . . , k5′, como se vˆe na
tabela 1.3.
Tabela 1.1: Planos contendo l cuja interse¸c˜ao com S consiste de trˆes retas distintas.
planos retas
π1 l, l1 e l′1
π2 l, l2 e l′2
π3 l, l3 e l′3
π4 l, l4 e l′4
π5 l, l5 e l′5
Tabela 1.2: Planos contendo l1 cuja interse¸c˜ao com S consiste de trˆes retas distintas.
planos retas
π1 l, l1 e l′1
π′
2 m2, l1 em′2
π′
3 m3, l1 em′3
π′
4 m4, l1 em′4
π′
5 m5, l1 em′5
Tabela 1.3: Planos contendo l′
1 cuja interse¸c˜ao com S consiste de trˆes retas distintas.
planos retas
π1 l, l1 e l′1
π′′
2 k2, k′2 e l1′
π′′
3 k3, k′3 e l1′
π′′
4 k4, k′4 e l1′
π′′
5 k5, k′5 e l1′
Observe que as retas de cada tabela s˜ao duas a duas distintas. Para ver que nenhuma das 8 retas m2, m′2, . . . , m′5 coincide com alguma das 11 retas da tabela 1.1 suponha sem
perda de generalidade quemi =lj para algum i∈ {2,3,4,5} e para algumj ∈ {2,3,4,5} (Note que mi j´a ´e diferente de l, l1 e l1′). Da´ı o plano πi′ cont´em as retas lj e l1. Assim
lj∩l1 6=∅ com j 6= 1, o que contradiz a afirma¸c˜ao 1.1. De modo an´alogo conclu´ımos que
as retasm2, m′2, . . . , m5 s˜ao diferentes de todas as retas da tabela 1.3. O mesmo racioc´ınio
se estende para as retask2, k2′, . . . , k5′, de modo a concluirmos que as 27 retas do conjunto
LS ={l, l1, l1′, . . . , m2, m′2, . . . , k5, k5′} s˜ao duas a duas distintas.
Lema 1.4 Seja L ⊂ S uma reta tal que L∩l 6= ∅ ou L∩l1 6= ∅ ou L∩l′1 6= ∅, ent˜ao
Demonstra¸c˜ao: De fato, seja L ⊂ S uma reta. Suponha sem perda de generalidade que L∩l 6=∅. Se L=l, ent˜ao L∈ LS e se L∩l ={p}, ent˜ao as retas l e L determinam
um ´unico plano π que as cont´em. Pelo lema 1.1 a interse¸c˜ao π∩S pode representar no plano π, uma curva c´ubica irredut´ıvel, a uni˜ao de uma reta com uma cˆonica irredut´ıvel ou a uni˜ao de trˆes retas distintas. Se π∩S ´e uma curva c´ubica irredut´ıvel α no plano π, ent˜ao L ⊂ π ∩S = α. Como dimL = dimα = 1, ent˜ao pela proposi¸c˜ao A.4 temos que
l =α, o que ´e um absurdo. Seπ∩S ´e a uni˜ao de uma reta rcom uma cˆonica α no plano
π, ent˜ao L ⊂ π∩S = r∪α. Logo L = (r∩L)∪(α∩L) e pela proposi¸c˜ao A.3 temos que L = r. Analogamente, como l ⊂ π ∩S temos que l = r. Logo l = L, o que ´e um absurdo. Portanto π∩S consiste de trˆes retas distintas. Pelo lema 1.3 temos que π =πi
para algum i= 1,2,3,4,5 e portanto L∈ {li, l′
i} ⊂ LS.
Lema 1.5 Seja L⊂S uma reta, ent˜ao L∩l 6=∅ ou L∩l1 6=∅ ou L∩l′1 6=∅.
Demonstra¸c˜ao: Primeiramente observe que dois planos distintos em P3 sempre se interceptam determinando uma reta. Al´em disso dado um plano π e uma reta r em
P3, temos pela proposi¸c˜ao A.3 que π∩r 6= ∅. Agora seja L ⊂ S uma reta e seja π1 o
plano cuja interse¸c˜ao com S s˜ao as retas l, l1 e l1′, temos que existe p ∈ L∩π1. Logo
p∈π1∩S =l∪l1∪l1′, isto ´e, uma da intersec˜oesL∩l, L∩l1, L∩l′1 ´e n˜ao vazia.
Teorema 1.2 S contem exatamente 27 retas.
Cap´ıtulo 2
Classifica¸c˜
ao das Singularidades
Isoladas Segundo Arnold (1937-2010)
Neste cap´ıtulo iremos classificar as singularidades das curvas c´ubicas planas como motiva¸c˜ao para o pr´oximo cap´ıtulo onde usaremos esta classifica¸c˜ao para contabilizar as retas sobre uma superf´ıcie c´ubica em P3.
2.1
S´
eries de Potˆ
encia
SejaKum corpo e sejamz1, . . . , zrindeterminadas sobreK. Denotamos porK[[z1, . . . , zr]],
o conjunto das somas formais do tipo:
f =
∞
X
i=0
Pi =P0+P1+P2 +· · · ,
onde cada Pi ´e um polinˆomio homogˆeneo de grau i nas indeterminadas z1, . . . , zr.
Sejam f =
∞
X
i=0
Pi e g =
∞
X
i=0
Qi, definimos
f +g :=
∞
X
i=0
(Pi+Qi)
e
f.g:=
∞
X
i=0
i
X
j=0
PjQi−j.
Prova-se que com essas opera¸c˜oes K[[z1, . . . , zr]] ´e um anel comutativo com unidade.
Al´em disso, um elemento P =
∞
X
i=0
invert´ıvel em K. Com efeito, seja g =
∞
X
i=0
Qi o inverso de f, ent˜ao f g = 1, e portanto
P0Q0 = 1
P0Q1+P1Q0 = 0
. . .
P0Qi+· · ·+PiQ0 = 0
· · ·
Em particular, deP0Q0 = 1, temos que P0 ´e invert´ıvel. Reciprocamente, note que se
P0´e invert´ıvel, ent˜ao as equa¸c˜oes acima nos permite determinar sucessivamenteQ0, Q1, . . .
de forma que f.g= 1, onde g =
∞
X
i=0
Qi.
Fixando f1, . . . , fr ∈ hz1, . . . , zri, ´e sempre poss´ıvel determinar um homomorfismo de
an´eis ϕ :K[[z1, . . . , zr]]7−→ K[[z1, . . . , zr]] tal que ϕ(zi) = fi e ϕ(a) =a, ∀a ∈K. Este
homomorfismo ser´a um isomorfismo se, e somente se, as partes lineares de f1, . . . , fr s˜ao
linearmente independentes. (Veja proposi¸c˜ao 8 pag. 13 em [3].) Considere a seguinte rela¸c˜ao emK[[z1, . . . , zr]]
f ∼g ⇐⇒ ∃ ϕ isomorfismo, tal que ϕ(f) =g.
Note que esta ´e uma rela¸c˜ao de equivalˆencia. Com efeito,
i Se ϕ´e a identidade, ent˜ao ϕ(f) =f e portantof ∼f, ∀f.
ii Se f ∼g, ent˜ao ∃ ϕ tal que ϕ(f) = g. Logo ϕ−1(g) =f e portanto g ∼f.
iii Sef ∼geg ∼h, ent˜ao∃ϕ1, ϕ2tais queϕ1(f) =g eϕ2(g) = h. Logoϕ2◦ϕ1(f) = h
e portanto f ∼h.
Considere uma hipersuperf´ıcie Z(f)⊂Ar, e sejaP uma singularidade isolada de Z(f), a menos de uma mudan¸ca de coordenadas afim podemos considerar P = (0, . . . ,0). Assim temos que f ´e equivalente a um dos seguintes polinˆomios, denominados formas normais:
An zn1+1+
r
X
2
zi2 (n ≥1)
Dn zn1−1+z1z22+
r
X
3
zi2 (n ≥4)
E6 z31 +z24+
r
X
3
zi2
E7 z31 +z1z32 +
r
X
3
zi2
E8 z31 +z25+
r
X
3
zi2
b
E6 z31 +z23+z33+ 3λz1z2z3+
r
X
4
Assim, se por exemplo f for equivalente a zn+1
1 +
r
X
2
zi2, ent˜ao dizemos que a
singu-laridade P ´e do tipo An. Esta classifica¸c˜ao das singularidades isoladas de uma hipersu-perf´ıcie ´e devida a Arnold. Para classificar uma singularidade P ∈ C = Z(f) quando
C ´e uma hipersuperf´ıcie em Pr, consideramos um aberto do tipo Ui = Z(xi)C de forma
que P ∈ C∩Ui. Assim tomando a identifica¸c˜ao C∩Ui ←→φ Ce =Z(fe) ⊂ Ar, o tipo da singularidade P ∈C ser´a definido como o tipo da singularidade de φ(P)∈Ce.
Defini¸c˜ao 2.1 Sejamd, w1, . . . , wr ∈Zef ∈C[z1, . . . , zr], dizemos quef ´e um polinˆomio
quase-homogˆeneo de tipo (d;w1, . . . , wr) se, e somente se, todo monˆomiozα =z1α1. . . zαrr que comparece em f tem grau d relativo aos pesos w1, . . . , wr, onde
grau(zα) =α1w1+· · ·+αrwr.
Dizemos que f ∈C[z1. . . , zr]´e quase-homogˆeneo se for quase-homogˆeneo de algum tipo.
Exemplo 2.1 O polinˆomio f = z3
1 +z22 +z32 ∈ C[z1, z2, z3] ´e quase-homogˆeneo de tipo
(1; 13,12,12)
Defini¸c˜ao 2.2 Sejaf ∈C[[z1, . . . , zr]], f´e dita semiquasehomogˆenea de tipo(d;w1, . . . , wr)
se, e somente se,
f =f0+f1,
onde f0 ´e um polinˆomio em C[z1, . . . , zr] quase-homogˆeneo de tipo (d;w1, . . . , wr) que
possui uma singularidade isolada na origem e grau(f1)> grau(f0), onde
grau(f1) =inf{grau(zα)| f1 =
X
α
cαzα, cα
6
= 0}.
f0 ´e dita parte principal da s´erie de potˆencia f.
Exemplo 2.2 Considere f = f0 +f1 ∈ C[[z1, z2, z3]], onde f0 = z12 +z22 +z33 e f1 =
z4
1+z24+z35+z16+z26+z37+· · ·. Note quef0´e quase-homogˆeneo de tipo (1;21,12,13), a origem
´e seu ´unico ponto singular egrau(f1) = 2>1 = grau(f0). Logo f ´e semiquasehomogˆenea
de tipo (1;1 2,
1 2,
1 3).
Teorema 2.1 (Princ´ıpio do Reconhecimento) Seja f ∈ C[[z1, . . . , zr]] uma s´erie de
potˆencia. Atribua pesos w1, . . . , wr `as vari´aveisz1, . . . , zr de maneira que uma das formas
normais An, Dn, E6, E7, E8,Eb6 tenha grau 1. Se f = f0 +f1 ´e semiquasehomogˆenea de
tipo (1;w1, . . . , wr), ent˜ao f ∼ f0 e f0 ´e equivalente `a respectiva forma normal de grau 1
na classifica¸c˜ao de Arnold.
Demonstra¸c˜ao: Veja corol´ario pag. 245 em [5].
2.2
Classifica¸c˜
ao das Singularidades das C´
ubicas Planas
Observemos inicialmente que uma c´ubica plana projetiva n˜ao reduzida n˜ao possui sin-gularidades isoladas. Assim a seguir trataremos com c´ubicas projetivas planas reduzidas. No apˆendice B provamos que uma curva c´ubica plana projetiva reduzida ´e projetivamente equivalente a uma das seguintes: x0x1x2, x0x1(x0 +x1), (x0x2 −x21)x1, (x0x2 −x21)x0,
x2
Caso 1
f
=
x
0x
1x
2Note que P1 = [0 : 0 : 1], P2 = [0 : 1 : 0] e P3 = [1 : 0 : 0] s˜ao pontos singulares de
C =Z(f). Vamos mostrar que estes s˜ao os ´unicos. Com efeito, sejaP = [a :b:c]∈Z(f), temos que ∂x∂f
0(P) = bc,
∂f
∂x1(P) =ac,
∂f
∂x2(P) =ab. Se P ´e diferente de P1, P2 e P3, ent˜ao
pelo menos duas de suas entradas s˜ao n˜ao nulas. Logo pelo menos uma das derivadas acima ´e n˜ao nula. Portanto P n˜ao ´e um ponto singular.
Para classificar a singularidade no ponto P = [0 : 0 : 1], considere o aberto afim
x2 = 1. Logo fe=x0x1. Agora considerando o isomorfismo
ϕ : C[[x0, x1]] −→ C[[x0, x1]]
a 7−→ a
x0 7−→ x0+ix1
x1 7−→ x0−ix1
temos que fe∼ x2
0+x21. Portanto a singularidade P = [0 : 0 : 1] ´e do tipo A1.
Analoga-mente, escolhendo abertos convenientes, conclu´ımos que as demais singularidades tamb´em s˜ao do tipo A1
Caso 2
f
=
x
0x
1(
x
0+
x
1)
Vamos provar que P = [0 : 0 : 1] ´e o ´unico ponto singular deC =Z(f). Com efeito, seja P = [a: b :c] outro ponto singular deC, ent˜ao f(P) = 0,∂x∂f0(P) = 0 e ∂x∂f1(P) = 0. Assim temos o seguinte sistema
ab(a+b) = 0
a(2b+a) = 0
b(2a+b) = 0
cuja solu¸c˜ao ´eb =a = 0. PortantoP = [0 : 0 : 1] ´e o ´unico ponto singular. No aberto afim
x2 = 1, temos que fe= x0x1(x0 +x1). Para finalizar, considere o isomorfismo induzido
por x0 7−→ x0 +ix1, x1 7−→ x0 −ix1. Note que fe∼ 2(x30+x0x21) ∼ x30 +x0x21. Logo a
singularidade P = [0 : 0 : 1] ∈C ´e do tipo D4.
Caso 3
f
= (
x
0x
2−
x
21)
x
0SejaP = [a:b :c] um ponto singular deC=Z(f). Segue quea = 0 pois ∂x∂f2(P) =a2,
e b = 0 pois ∂x∂f
0(P) = 2ac−b
2 =−b2. Logo P = [0 : 0 : 1] ´e o ´unico ponto singular de
C = Z(f). Tomando o aberto afim x2 = 1, temos que fe= x20−x0x21. Considerando o
isomorfismo induzido por x0 7−→u2x02+x1,x1 7−→u
√
2x1, ondeu4 =−1, conclu´ımos que
e
f ∼x4
0+x21. Portanto a singularidade P = [0 : 0 : 1] ∈C ´e do tipo A3.
Caso 4
f
= (
x
0x
2−
x
21)
x
1Neste caso os ´unicos pontos singulares deC =Z(f) s˜aoP1 = [0 : 0 : 1] eP2 = [1 : 0 :
0]. Com efeito, seja P = [a:b :c] um ponto singular deC, temos que ∂f
∂x0(P) =
∂f
∂x1(P) =
∂f
bc = 0
ac−3b2 = 0
ab = 0
que tem como solu¸c˜ao a = b = 0 ou b =c = 0. Logo P = [0 : 0 : 1] ou P = [1 : 0 : 0]. No aberto afim x2 = 1, temos que fe=x0x1 −x31. Considere o isomorfismo induzido por
x0 7−→x0+ix1, x1 7−→x0−ix1
Note quefe∼x2
0+x21−x30+ 3ix20x1+ 3x0x21−ix31. Pondo peso 1/2 em ambas vari´aveis
x0 ex1, temos quex20+x21 tˆem grau 1, e−x03+ 3ix20x1+ 3x0x21−ix31 tem grau maior que 1.
Assim, Pelo princ´ıpio do Reconhecimento, temos quefe∼x2
0+x21. LogoP1 = [0 : 0 : 1] ∈C
´e uma singularidade do tipoA1.
Analogamente, no aberto x0 = 1 temos que fe=x1x2 −x31. Definindo o isomorfismo
induzido por x1 7−→x1+ix2 ex2 7−→x1−ix2 conclu´ımos quefe∼x21+x22−x31+ 3ix21x2+
3x1x22−ix23. Pondo novamente peso 1/2 em ambas vari´aveisx1 ex2 e usando o Princ´ıpio
do Reconhecimento conclu´ımos que fe∼x2
1+x22. Portanto P2 = [1 : 0 : 0]∈C tamb´em ´e
uma singularidade do tipo A1.
Caso 5
f
=
x
21
x
2−
x
30−
x
20x
2Do lema B.7 conclu´ımos que f possui exatamente um ponto singular, a saber, P = [0 : 0 : 1]. Tomando o aberto afim x2 = 1, segue que fe= x12 −x30 −x20. Considere o
isomorfismo induzido por x0 7−→ ix0 e x1 7−→ x1. Segue que fe∼ x20+x21 −ix30. Pondo
peso 1/2 em ambas as vari´aveis, segue do Princ´ıpio do Reconhecimento que fe∼x2 0+x21.
Logo a singularidade P ∈C ´e do tipo A1.
Caso 6
f
=
x
2x
21−
x
30Novamente temos que P = [0 : 0 : 1] ´e o ´unico ponto singular da curva. Tomando o aberto afim x2 = 1, segue que fe=x21−x30. Considere agora o isomorfismo induzido por
Cap´ıtulo 3
Contagem das Retas numa
Superf´ıcie C´
ubica em
P
3
Neste cap´ıtulo sejam R = C[x0, x1, x2, x3] e Ri ⊂ R o subespa¸co vetorial dos
polinˆomios homogˆeneos de grau i. Considere F ∈ R3 n˜ao nulo e S = Z(F) ⊂ P3.
Observe que se S for uma superf´ıcie n˜ao reduzida, isto ´e, F ´e um polinˆomio que n˜ao ´e livre de quadrados, ent˜aoF =L3 ouF =L2M comL, M L.I. emR
1. Portanto Scont´em
infinitas retas.
Agora, se S for uma superf´ıcie reduzida e redut´ıvel necessariamente F = LQ ou
F =LM1M2 com L, M1, M2 L.I. em R1 e Q∈R2 irredut´ıvel. Assim, neste caso tamb´em
cont´em infinitas retas.
Assim, daqui em diante assumiremos que S ´e irredut´ıvel e reduzida, o que nos leva a analisar duas possibilidades, a saber: S ´e n˜ao singular ou S ´e singular. Se S ´e n˜ao singular ent˜ao S cont´em exatamente 27 retas (Ver cap´ıtulo 1). Se S for singular ent˜ao temos a seguinte descri¸c˜ao para as singularidades, Sing(S)⊂S, de S.
Teorema 3.1 Seja S = Z(F) uma superf´ıcie c´ubica irredut´ıvel reduzida e singular em
P3. Ent˜ao dimSing(S) = 0, ou seja, S s´o possui singularidades isoladas ou Sing(S) ´e uma reta em P3.
Demonstra¸c˜ao: Como Sing(S) ´e uma subvariedade contida estritamente em S e
dim(S) = 2, temos que dimSing(S)≤ 1. Se dimSing(S) = 0, ent˜ao naturalmente S s´o possui singularidades isoladas. Assim, nos resta mostrar que se dimSing(S) = 1, ent˜ao
Sing(S) ´e uma reta. Com efeito, seja (P3)∗ = {H ⊂ P3| H ´e um plano} o dual de P3,
o Teorema de Bertini (1846 - 1933) garante que existe um aberto n˜ao vazio U de (P3)∗
tal que H ∩S ´e irredut´ıvel para todo H ∈ U. Seja C uma componente irredut´ıvel de dimens˜ao 1 de Sing(S). Seja d o grau da curva C. Sabemos que existe um aberto n˜ao vazio V em (P3)∗ tal que H ∩C consiste de exatamente d pontos distintos para todo
H ∈ V. Al´em disso, prova-se que cada ponto de H ∩C ´e um ponto singular da curva
H∩S. Por outro lado, se escolhemos H ∈U, ent˜ao H∩S ´e uma c´ubica irredut´ıvel, logo admite no m´aximo um ponto singular. Escolhendo H ∈U ∩V, conclu´ımos que C ´e uma curva de grau d= 1, e portanto ´e uma reta.
Conclu´ımos at´e aqui que toda componente irredut´ıvel de dimens˜ao 1 de Sing(S) ´e uma reta. Agora suponha que existam retas distintas l1, l2 tais que l1 ∪l2 ⊂ Sing(S).
Neste caso existe um abertoV1 de (P3)∗ tal que H∩(l1∪l2) consiste de 2 pontos distintos.
Escolhendo H ∈ U ∩V1 conclu´ımos que a curva irredut´ıvel H ∩S possui dois pontos
Para finalizar, suponha que existam l reta e P 6∈ l tais que l∪ {P} ⊂ Sing(S). Por uma mudan¸ca de coordenadas podemos considerar l = Z(x2, x3) e P = [0 : 0 : 0 : 1].
De P = [0 : 0 : 0 : 1] temos que F = x3f2(x0, x1, x2) +f3(x0, x1, x2). Dados α, β ∈ C,
temos que f3(α, β,0) = F(α, β,0,0) = 0. Logo Z(x2) ⊂ Z(f3) em P2, e portanto existe
h ∈ C[x0, x1, x2] tal que f3 = hx2. Por outro lado, f2(α, β,0) = ∂x∂F3(α, β,0,0) = 0.
Logo Z(x2) ⊂ Z(f2) em P2, e portanto existe eh ∈ C[x0, x1, x2] tal que f2 = ehx2. Logo
F =x2(x3eh+h), o que ´e um absurdo.
O conjunto dos pontos singulares de
S
=
Z
(
F
)
´
e uma reta em
P
3Proposi¸c˜ao 3.1 Seja S=Z(F)⊂P3 uma superf´ıcie c´ubica irredut´ıvel e reduzida tal que Sing(S) = Z(x0, x1)⊂P3. Ent˜ao
1. F = x3f2(x0, x1) + x2g2(x0, x1) +g3(x0, x1) para algum f2, g2, g3 ∈ C[x0, x1]
ho-mogˆeneos de grau 2 e 3 conforme os ´ındices.
2. S cont´em infinitas retas.
Demonstra¸c˜ao: Como P = [0 : 0 : 0 : 1] ∈ Sing(S), ent˜ao podemos escrever
F = x3f2(x0, x1, x2) + f3(x0, x1, x2) com fi homogˆeneo de grau i = 2,3 e f3 6= 0. Por
sua vez, podemos ainda escrever f2 = α0x22 +x2α1(x0, x1) +α2(x0, x1) e f3 = β0x32 +
β1(x0, x1)x22+β2(x0, x1)x2+β3(x0, x1) com α1, α2, β1, β2, β3 homogˆeneos de graus 1, 2 e 3
conforme o ´ındice e α0, β0 constantes.
Sejam Q = [0 : 0 : 1 : 0], Q1 = [0 : 0 : 1 : 1] ∈ Sing(S), temos que ∂x∂F3(Q) =
α0 = 0, ∂x∂F2(Q) = 3β0 = 0,
∂F
∂xi(Q) =
∂β1
∂xi para i = 0,1 donde conclu´ımos que β1 = 0 e
∂F
∂xi(Q1) =
∂α1
∂xi para i = 0,1 donde conclu´ımos que α1 = 0. Portanto F = x3α2(x0, x1) +
x2β2(x0, x1) +β3(x0, x1), e assim provamos 1. Agora se α2 = 0 ou β2 = 0, ent˜ao S ´e
um cone. Logo cont´em infinitas retas como veremos no caso 1 na subse¸c˜ao 3.1. No caso
α2β2 6= 0, considere para cada µ∈C o plano Hµ =Z(x0 −µx1). A interse¸c˜aoHµ∩S ´e
definida pelo polinˆomioF(µx1, x1, x2, x3) = x21[α2(µ,1)x3+β2(µ,1)x2+β3(µ,1)x1]. Assim
determinamos uma fam´ılia infinita de retas lµ = Z(x0 −µx1, α2(µ,1)x3 +β2(µ,1)x2 +
β3(µ,1)x1) contidas em S.
A conclus˜ao do caso geral segue da utiliza¸c˜ao de uma mudan¸ca de coordenadas proje-tiva T tal que T(Sing(S)) =Z(x0, x1).
A superf´ıcie
S
=
Z
(
F
)
s´
o possui singularidades isoladas
Ap´os fazer uma mudan¸ca de coordenada projetiva, se necess´ario, podemos assumir que P = [0 : 0 : 0 : 1]∈Sing(S). Assim com um c´alculo an´alogo ao que fizemos no lema B.7 podemos concluir que
F =x3f2(x0, x1, x2) +f3(x0, x1, x2), (3.1)
onde fi ´e homogˆeneo de grau i= 2,3 e f3 6= 0.
Definimos o posto da forma quadr´atica f2 como sendo o posto da matriz hessiana
associada af2. A seguir faremos a classifica¸c˜ao das superf´ıcies c´ubicas irredut´ıveis
reduzi-das e singulares estudando o posto de f2. Para contabilizar as retas sobre a superf´ıcie
que na verdade s˜ao os abertos que cobrem a grassmanniana G(2,4), e em cada pacote contamos as retas que est˜ao sobre a superf´ıcie dada. Usaremos este algoritmo no caso em que o posto de f2 ´e igual a 1. O segundo algoritmo consiste em dividir as retas sobre
S em dois pacotes: O pacote das retas que passam por P e o pacote das retas que n˜ao passam por P. Para contabilizar as retas que passam porP usamos a proposi¸c˜ao 3.5 que afirma que estas est˜ao em bije¸c˜ao com Z(f2)∩Z(f3)⊂P2 sef2 6= 0. Para contabilizar as
retas que n˜ao passam por P usamos a proposi¸c˜ao 3.6 que afirma que estas est˜ao contidas em planos determinados pelas retas que cont´em P.
3.1
Caso 1: Posto de
f
2´
e zero
Neste caso f2 = 0 e portanto F = f3(x0, x1, x2) ∈ C[x0, x1, x2, x3]. Assim S ´e um
cone. Observe que
S=Z(F) = [
Q∈S∩Z(x3)
lP,Q,
ondelP,Q ⊂P3 denota a ´unica reta emP3 passando por P = [0 : 0 : 0 : 1] eQ∈S∩Z(x3).
Logo S cont´em infinitas retas. Al´em disso Sing(S) depende das singularidades da curva
C =S∩Z(x3). De fato,
Teorema 3.2 Seja S = Z(F) ⊂ P3 com F = f3(x0, x1, x2) uma superf´ıcie c´ubica
irre-dut´ıvel reduzida. Ent˜ao
Sing(S) =
{P}, se Sing(C) =∅
lP,Q, se Sing(C) ={Q}.
Demonstra¸c˜ao:
Assuma que C = Z(f3) ⊂ P2 ´e n˜ao singular. Seja R = [a : b : c : d] ∈ P3 um ponto
singular de Z(F)⊂P3. Ent˜ao
f3(a, b, c) =
∂f3
∂xi(a, b, c) = 0, i= 0,1,2.
Se (a, b, c) 6= (0,0,0), ent˜ao [a : b : c] ∈ P2 ´e um ponto singular de C, o que est´a proibido por hip´otese. Logo R=P e portanto Sing(S) = {P}.
Reciprocamente, assuma que C ´e singular. Como f3 ´e irredut´ıvel segue do lema B.7
e seja Q = [a : b : c: 0] ∈ P3, afirmamos que Sing(S) = lP,Q. Com efeito, se P1 ∈ lP,Q,
ent˜ao P1 = [sa:sb:sc:t] para algum [s:t]∈P1. Logo
∂f3
∂xi(P1) = ∂f3
∂xi(sa, sb, sc) =s
2∂f3
∂xi(a, b, c) = 0 ∀ i= 0,1,2.
Logo P1 ∈Sing(S). Portanto, segue-se do teorema 3.1 que sing(S) =lP Q.
Se S admite P como singularidade isolada, ent˜ao P ´e uma singularidade isolada do tipo Ec6, conforme mostra o pr´oximo teorema.
Teorema 3.3 Seja S = Z(F) ⊂ P3 com F = f3(x0, x1, x2) uma superf´ıcie c´ubica
ir-redut´ıvel reduzida singular. Se P = [0 : 0 : 0 : 1] ´e o ´unico ponto singular em S, ent˜ao existe uma mudan¸ca de coordenadas projetivas T : P3 −→ P3 tal que T•x3 = x3 e
T•F =x3
0 +x31 +x32+ 3λx0x1x2, λ 6=−1 e portanto P ´e um ponto singular do tipo Ec6.
Caso contr´ario, existe T:P3 −→P3 mudan¸ca de coordenadas projetivas tal queT•x3 =x3
e
T•F =
x2(x21−x20)−x30
ou x2x21−x30.
Demonstra¸c˜ao: Se P = [0 : 0 : 0 : 1] ´e o ´unico ponto singular de S ⊂ P3, ent˜ao a curva Z(f3) ´e n˜ao singular. Assim pelo lema B.8 existe uma mudan¸ca de coordenadas
T:P2 −→P2 tal que T•f3 =x30+x31 +x32+ 3λx0x1x2. Note que {T•x0, T•x1, T•x2, x3} ⊂
C[x0, x1, x2, x3]1 ´e linearmente independente. Da´ı podemos definir o isomorfismo de C
-´algebras Te• : C[x0, x1, x2, x3] −→ C[x0, x1, x2, x3] pondo Te•x3 = x3 e Te•xi = T•xi, i =
0,1,2. Desta forma obtemos uma mudan¸ca de coordenadas Te :P3 −→P3 tal que Te•F =
x3
0+x31+x32+ 3λx0x1x2 eTe•x3 =x3.
SeSing(S) =lP Q, ent˜ao a curvaZ(f3) ´e singular. Segue da proposi¸c˜ao B.5 que existe
uma mudan¸ca de coordenadas projetivas T:P2 −→P2 tal que
T•f =
x2(x21−x20)−x30
ou
x2x21−x30.
Logo, definimosTe• :C[x0, x1, x2, x3]−→C[x0, x1, x2, x3] pondoTe•x3 =x3 e Te•xi =xi,
i= 0,1,2.
3.2
Caso 2: Posto de
f
2´
e igual a 1
Seja F = F(x0, x1, x2, x3) como em (3.1). Se o posto de f2 ´e igual a 1, ent˜ao pelo
teorema A.4 existe uma mudan¸ca de coordenadas T : P2 −→ P2 tal que T•f2 = x20.
Definamos Te• : C[x0, x1, x1, x3] −→ C[x0, x1, x2, x3] pondo Te•x3 = x3 e Te•xi = T•xi
com i = 0,1,2. Segue que Te•F = x3x20 +g3(x0, x1, x2), onde g ´e homogˆeneo de grau 3.
Escrevendo g3(x0, x1, x2) =x20h1(x0, x1, x2) +x0h2(x1, x2) +h3(x1, x2) com hi homogˆeneo
de grau i= 1,2,3 temos que
e
Considere a mudan¸ca de coordenadasS:P3 −→P3tal queS•(x3+h1(x0, x1, x2)) = x3
e S•xi =xi,i= 0,1,2. Assim obtemos
G=x3x20+x0h2(x1, x2) +h3(x1, x2) (3.2)
Lema 3.1 SejaG como em (3.2). Se Z(h3)⊂P1 consiste de trˆes pontos distintos, ent˜ao
P = [0 : 0 : 0 : 1] ´e o ´unico ponto singular de S =Z(G)⊂P3. Al´em disso P ´e um ponto
singular do tipo D4.
Demonstra¸c˜ao:
Sendo ♯(Z(h3)) = 3 existem L, L1, L2 ∈ C[x1, x2]1 formas lineares duas a duas L.I.
tais que h3 = LL1L2. Assim existem a, b ∈ C\{0} tais que L = aL1+bL2. Considere
a mudan¸ca de coordenadas T : P3 −→ P3 tal que T•x0 = x0, T•x3 = x3, T•L1 =
µb(x1+ix2), T•L2 =µa(x1−ix2) onde µ3 = 2a12b2. Segue que
T•G=x3x20+x0he2(x1, x2) +x31+x1x22.
Assim podemos dizer que a menos de uma mudan¸ca de coordenadas
G=x3x20+x0eh2(x1, x2) +x31+x1x22.
Dado R = [a : b : c : d] ∈ P3 temos que ∂G
∂x0(R) = 2ad+eh2(b, c),
∂G
∂x1(R) = a
∂eh2
∂x1(b, c) +
3b2+c2, ∂G
∂x2(R) = a
∂eh2
∂x2(b, c) + 2bce
∂G
∂x3(R) =a
2.
SeR ∈ Sing(S), ent˜ao das equa¸c˜oes acima conclu´ımos que a =b =c= 0 e portanto
R =P. Para verificar que P ´e um ponto singular do tipo D4. Note que no aberto afim
x3 = 1, obtemos
G=x2
0+x0he2(x1, x2) +x31 +x1x22.
Atribuindo os pesos 12,13,31 as vari´aveisx0, x1, x2 respectivamente e usando o Princ´ıpio do
Reconhecimento conclu´ımos que G ∼x2
0 +x31+x1x22. Logo P ´e um ponto singular de S
do tipo D4.
Proposi¸c˜ao 3.2 Seja G ∈ C[x0, x1, x2, x3] como em (3.2). Suponha que Z(h3) ⊂ P1
consiste de trˆes pontos distintos. Logo S =Z(G)⊂P3 contem exatamente 6 retas.
Demonstra¸c˜ao: Para provar a proposi¸c˜ao iremos calcular quantas das restas contidas em cada aberto Uij de G(2,4) (Ver apˆendice A) est˜ao contidas em S = Z(G), onde
G(x0, x1, x2, x3) =x3x20+x0(αx12+βx1x2+γx22) +x31+x32, com α, β, γ ∈C.
Considere o conjunto U12 = {[(1,0, a, b),(0,1, c, d)] ∈ G(2,4)| a, b, c, d ∈ C}. Seja
l ∈U12 tal que l ⊂S=Z(G), ent˜ao
G(s, t, sa+tc, sb+td) = 0,∀ s, t ∈C.
Da equa¸c˜ao acima obtemos o sistema ema, b, c, d
b+γa2+a3 = 0
d+βa+eγac+ 3a2c= 0
αβc+γc2 + 3c2a= 0
Note que a equa¸c˜ao 1 +c3 = 0 admite exatamente 3 solu¸c˜oes distintas em C, e para
cada valor de cfixado as demais equa¸c˜oes nos fornecem valores ´unicos para a, be d. Logo existem exatamente trˆes retas de U12 contidas em S.
Considere o conjunto U13 = {[(1, a,0, b),(0, c,1, d)] ∈ G(2,4)| a, b, c, d ∈ C}. Seja
l ∈U13 tal que l ⊂S=Z(G), ent˜ao
G(s, sa+tc, t, sb+td) = 0, ∀s, t ∈C.
Da equa¸c˜ao acima obtemos o sistema ema, b, c, d
b+αa2+a3 = 0
d+ 2acα+βa+ 3a2c= 0
αc2+βcγ3ac2 = 0
1 +c3 = 0
Analogamente este sistema admite trˆes solu¸c˜oes. Por´em as retas aqui encontradas s˜ao as mesmas retas do caso anterior. Com efeito, seja l = P(W) ∈ U13 com W =
[(1, a,0, b),(0, c,1, d)] el⊂S. Comoc6= 0, podemos escreverW = [(1,0, a′, b′),(0,1, c′, d′)]
e portanto l ∈U12.
Considere o conjunto U14 = {[(1, a, b,0),(0, c, d,1)] ∈ G(2,4)| a, b, c, d ∈ C}. Seja
l ∈U14 tal que l ⊂S=Z(G), ent˜ao
G(s, sa+tc, sb+td, t) = 0, ∀s, t ∈C.
Da equa¸c˜ao acima obtemos o sistema ema, b, c, d
αa2+abβ+γb2+a3+b3 = 0
1 + 2acα+β(ad+bc) + 2γbd+ 3a2c+ 3b2d= 0
αc2+βcd+γd2+ 3ac2+ 3bd2 = 0
c3+d3 = 0
Sabemos que cada solu¸c˜ao (a, b, c, d) do sistema acima determina uma retal=P(W)∈
U14 com W = [(1, a, b,0),(0, c, d,1)]. Note que l ∈ U12 se c6= 0 e l ∈U13 sed 6= 0. Al´em
disso, o sistema n˜ao admite solu¸c˜ao para c = d = 0. Logo n˜ao existem retas em U14
contidas em S al´em das j´a encontradas em U12 e U13.
Considere o conjunto U23 = {[(a,1,0, b),(c,0,1, d)] ∈ G(2,4)| a, b, c, d ∈ C}. Seja
l ∈U23 tal que l ⊂S=Z(G), ent˜ao
G(sa+tc, s, t, sb+td) = 0, ∀s, t ∈C.
Da equa¸c˜ao acima obtemos o sistema ema, b, c, d
a2b+αa+ 1 = 0
a2d+ 2acb+αc+βa= 0
2acd+c2b+βc+γa = 0
c2d+γc+ 1 = 0
Novamente, o sistema n˜ao admite solu¸c˜ao se c = 0. Logo n˜ao existe reta l ∈ U23
contida em S al´em das j´a determinadas em U12.
Considere o conjunto U24 = {[(a,1, b,0),(c,0, d,1)] ∈ G(2,4)| a, b, c, d ∈ C}. Seja
l ∈U24 tal que l ⊂S=Z(G), ent˜ao
Da equa¸c˜ao acima obtemos o sistema ema, b, c, d
αa+βab+γab2+b3+ 1 = 0
αc+a2+ 3db2+βcb+γcb2+ 2γadb= 0
3d2b+ 2ac+βcd+ 2γcdb+γad2 = 0
c2+d3 +γcd2 = 0
Sec= 0, ent˜aod=a= 0 e b3 =−1. Assim obtemos mais trˆes retas diferentes das j´a
encontradas nos abertos anteriores. Se c6= 0 reca´ımos no caso do aberto U12.
Finalmente, considere o conjunto U34 = {[(a, b,1,0),(c, d,0,1)] ∈ G(2,4)| a, b, c, d ∈
C}. Seja l ∈U34 tal que l ⊂S =Z(G), ent˜ao
G(sa+tc, sb+td, s, t) = 0, ∀s, t ∈C.
Da equa¸c˜ao acima obtemos o sistema ema, b, c, d
γa+βab+αab2+b3+ 1 = 0
a2+γc+αcb2+ 2αabd+ 3db2+βcb+βad = 0
2ac+ 3d2b+βcd+ 2αcdb+αad2 = 0
c2+αcd2+d3 = 0
Sec= 0, ent˜ao d=a= 0 e b3 =−1. Assim obtemos as trˆes retas j´a determinadas no
aberto anterior. Se c6= 0 reca´ımos no caso do aberto U13.
Proposi¸c˜ao 3.3 Seja G∈C[x0, x1, x2, x3]como em (3.2)e S =Z(G)⊂P3. Se Z(h3)⊂
P1 consiste de dois pontos distintos, ent˜ao a menos de uma mudan¸ca de coordenadas G=x3x20+x0eh2(x1, x2) +x21x2.
Al´em disso, se eh2(0,1) 6= 0, ent˜ao Sing(S) = {P} onde P = [0 : 0 : 0 : 1] ´e uma
singularidade isolada do tipo D5 eS cont´em exatamente trˆes retas. Seeh2(0,1) = 0, ent˜ao
Sing(S) = Z(x0, x1). Logo S cont´em infinitas retas.
Demonstra¸c˜ao: Como ♯(Z(h3)) = 2, existem L1, L2 formas lineares L.I. em C[x1, x2]
tais que h3(x1, x2) = L12L2. Tomando a mudan¸ca de coordenadas T : P3 −→ P3 tal que
T•x0 =x0, T•x3 =x3, T•L1 =x1, T•L2 =x2 obtemos T•G=x3x20+x0eh2(x1, x2) +x21x2,
onde eh2(x1, x2) ´e homogˆeneo de grau 2. Agora dividiremos o resto da prova em cinco
partes.
1. P = [0 : 0 : 0 : 1] ´e o ´unico ponto singular de S se, e somente se,eh2(0,1)6= 0.
Dado R = [a : b : c : d] ∈ P3, note que ∂x∂G3(R) = a2, ∂x∂G2(R) = a∂eh2
∂x2(b, c) +b
2,
∂G
∂x1(R) = a
e
h2
∂x1(b, c) + 2bc,
∂G
∂x0(R) = 2ad+eh2(b, c). Segue que R ∈ Sing(S) se,
e somente se, a = b = 0 e c2eh
2(0,1) = 0. Assim, se eh2(0,1) 6= 0 ent˜ao c = 0 e
portanto P ´e o ´unico ponto singular de S. Reciprocamente, se eh2(0,1) = 0, ent˜ao
para quaisquer valores de c, dtemos que R = [0 : 0 : c:d]∈ Sing(S) e portanto P
n˜ao ´e o ´unico ponto singular deS.
2. Seeh2(0,1)6= 0, ent˜aoP ´e uma singularidade do tipo D5.
Considere eh2(x1, x2) = αx21 +βx1x2 + γx22, com α, β, γ ∈ C. Se eh2(0,1) 6= 0,
x2
1x2. Atribuindo os pesos 12,38,14 `as vari´aveis x0, x1, x2 respectivamente e usando o
Princ´ıpio do Reconhecimento conclu´ımos que G ∼x2
0 +x21x2 +γx0x22. Considere o
isomorfismo de C-´algebras ϕ :C[[x0, x1, x2]]−→ C[[x0, x1, x2]] induzido por x0 7−→
x0+x22i, x1 7−→u1u2x1,x2 7−→v1v2x2 comu21v1 = 1, v12γ = 1, v22 =−2i, u22v2 = 1.
Segue que G∼x2
0+x21x2+x42 e portantoP = [0 : 0 : 0 : 1]∈Sing(S) ´e do tipo D5.
3. eh2(0,1) = 0 se, e somente se, Z(x0, x1) = Sing(S).
Como vimos em 1. R = [a : b : c : d] ´e singular se, e somente se, a = b =
c2eh
2(0,1) = 0. Assim, pondo a condi¸c˜ao eh2(0,1) = 0 temos que R ∈ Sing(S) se,
e somente se, a = b = 0. Segue que Sing(S) = Z(x0, x1). Reciprocamente, se
Sing(S) = Z(x0, x1), ent˜ao R = [0 : 0 : 1 : 0] ´e um ponto singular de S. Logo
satisfaz a condi¸c˜ao c2eh
2(0,1) = 0. Como neste caso c= 1, temos queeh2(0,1) = 0.
4. Se Sing(S) ={P}, ent˜ao S cont´em exatamente 3 retas.
Seja eh2(x1, x2) = αx20+βx0x1 +γx21, com α, β, γ ∈ C. Se P = [0 : 0 : 0 : 1] ´e o
´
unico ponto singular de S, ent˜ao pelos ´ıtens 1 e 3 desta proposi¸c˜ao conclu´ımos que
e
h2(0,1)6= 0, e portanto γ 6= 0.
Considere o conjunto U12 = {[(1,0, a, b),(0,1, c, d)] ∈ G(2,4)| a, b, c, d ∈ C}. Seja
l ∈U12 tal que l ⊂S=Z(G), ent˜ao
G(s, t, sa+tc, sb+td) = 0,∀ s, t ∈C.
Da equa¸c˜ao acima obtemos o sistema em a, b, c, d
γa2+b= 0
d+ 2γac+βa= 0
γc2+α+βc+a = 0
c= 0
Note que o sistema acima admite somente uma solu¸c˜ao, a saber a = −α, b =
−α2γ, c= 0, d=αβ. Logo, apenas uma reta do aberto U
12 est´a contida emS.
Considere o conjunto U13 = {[(1, a,0, b),(0, c,1, d)] ∈ G(2,4)| a, b, c, d ∈ C}. Seja
l ∈U13 tal que l ⊂S=Z(G), ent˜ao
G(s, sa+tc, t, sb+td) = 0,∀ s, t ∈C.
Da equa¸c˜ao acima obtemos o sistema em a, b, c, d
αa2+b= 0
d+βa+ 2αac+a2 = 0
βc+αc2+γ+ 2ac= 0
c2 = 0
As duas ´ultimas equa¸c˜oes deste sistema implicam em γ = 0, o que ´e um absurdo j´a queeh2(0,1)6= 0. Logo, nenhuma reta do aberto U13 est´a contida emS.
Considere o conjunto U14 = {[(1, a, b,0),(0, c, d,1)] ∈ G(2,4)| a, b, c, d ∈ C}. Seja
l ∈U14 tal que l ⊂S=Z(G), ent˜ao
Da equa¸c˜ao acima obtemos o sistema em a, b, c, d
γb2+βab+αa2+a2b = 0
1 +βbc+βad+ 2αac+ 2γbd+ 2abc+a2d= 0
βcd+αc2+γd2+c2b+ 2acd= 0
c2d= 0
Seja l =P(W) com W = [(1, a, b,0),(0, c, d,1)]. Se c6= 0 ent˜ao l ∈ U14∩U12, e se
d 6= 0 ent˜ao l ∈ U14∩U13. Al´em disso, o sistema acima n˜ao admite solu¸c˜ao para
c=d= 0. Logo n˜ao existe retas em U14 contidas em S al´em da j´a determinada em
U12.
Considere o conjunto U23 = {[(a,1,0, b),(c,0,1, d)] ∈ G(2,4)| a, b, c, d ∈ C}. Seja
l ∈U23 tal que l ⊂S=Z(G), ent˜ao
G(sa+tc, s, t, sb+td) = 0,∀ s, t ∈C.
Da equa¸c˜ao acima obtemos o sistema em a, b, c, d
a2b+αa = 0
βa+ 2abc+a2d+ac+ 1 = 0
bc2+ 2acd+βc+γa= 0
c2d+γc= 0
Seja l = P(W) com W = [(a,1,0, b),(c,0,1, d)]. Se c6= 0, ent˜ao l ∈ U23∩U12. Se
c= 0, ent˜ao o sistema n˜ao admite solu¸c˜ao. Logo n˜ao existe reta em U23 al´em da j´a
determinada em U12.
Considere o conjunto U24 = {[(a,1, b,0),(c,0, d,1)] ∈ G(2,4)| a, b, c, d ∈ C}. Seja
l ∈U24 tal que l ⊂S=Z(G), ent˜ao
G(sa+tc, s, sb+td, t) = 0,∀ s, t ∈C.
Da equa¸c˜ao acima obtemos o sistema em a, b, c, d
βab+γab2+αa+b = 0
a2 +αc+βbc+βad+d+γb2c+ 2γabd= 0
2ac+βcd+ 2γbcd+γad2 = 0
γcd2 = 0
Seja l = P(W) com W = [(a,1, b,0),(c,0, d,1)]. Se c6= 0, ent˜ao l ∈ U24∩U12. Se
a6= 0, ent˜ao l ∈U14∩U24. Se a=c= 0, ent˜ao b=d= 0 e portanto obtemos a reta
l = P([(0,1,0,0),(0,0,0,1)]). Note que esta reta ´e diferente daquela determinada em U12.
Considere o conjunto U34 = {[(a, b,1,0),(c, d,0,1)] ∈ G(2,4)| a, b, c, d ∈ C}. Seja
l ∈U34 tal que l ⊂S=Z(G), ent˜ao
Da equa¸c˜ao acima obtemos o sistema em a, b, c, d
αab2 +γa+βab+b2 = 0
a2+αb2c+ 2αabd+γc+ 2bd+βbc+βad= 0
2ac+ 2αbcd+αad2+βcd+d2 = 0
c2+αcd2 = 0
Seja l = P(W) com W = [(a, b,1,0),(c, d,0,1)]. Se a 6= 0, ent˜ao l ∈ U14∩U34.
Se b 6= 0, ent˜ao l ∈ U24∩U34. Se c 6= 0, ent˜ao l ∈ U13 ∩U34. Se d 6= 0, ent˜ao
l ∈ U23 ∩ U34. Sendo a = b = c = d = 0 uma solu¸c˜ao do sistema obtemos
l = P([(0,0,1,0),(0,0,0,1)]). Note que esta reta ´e diferente das duas anteriores. Assim, conclu´ımos que S contem exatamente trˆes retas.
5. Segue da proposi¸c˜ao 3.1 que seSing(S) =Z(x0, x1), ent˜ao S cont´em infinitas retas.
Proposi¸c˜ao 3.4 Seja G ∈ C[x0, x1, x2, x3] como em (3.2) e S = Z(G) ⊂ P3. Assuma
que Z(h3) ⊂ P1 consiste de um ´unico ponto. Segue que, a menos de uma mudan¸ca de
coordenadas,
G=x3x20+x0he2(x1, x2) +x31.
Al´em disso, se eh2(0,1) 6= 0, ent˜ao Sing(S) = {P} onde P = [0 : 0 : 0 : 1] ´e uma
singularidade isolada do tipo E6 eZ(x0, x1)´e a ´unica reta contida em S. Seeh2(0,1) = 0,
ent˜ao Sing(S) = Z(x0, x1). Logo S cont´em infinitas retas.
Demonstra¸c˜ao:
A demonstra¸c˜ao ser´a dividida em cinco partes.
1. P = [0 : 0 : 0 : 1] ´e o ´unico ponto singular de S se, e somente se,eh2(0,1)6= 0.
Dado R = [a :b : c: d] ∈P3, note que ∂G
∂x3(R) = a
2, ∂G
∂x2(R) = a
∂eh2
∂x2(b, c),
∂G ∂x1(R) =
a∂eh2
∂x1(b, c) + 3b
2, ∂G
∂x0(R) = 2ad+eh2(b, c). Segue que R ∈ Sing(S) se, e somente se,
c2eh
2(0,1) = a =b = 0. Assim, se eh2(0,1)6= 0 ent˜ao c= 0 e portanto P ´e o ´unico
ponto singular de S. Reciprocamente, se eh2(0,1) = 0, ent˜ao para quaisquer valores
de c, d temos que R = [0 : 0 : c : d] ∈ Sing(S) e portanto P n˜ao ´e o ´unico ponto singular de S.
2. Seeh2(0,1)6= 0, ent˜aoP ´e uma singularidade do tipo E6.
Considere eh2(x1, x2) =αx21+βx1x2+γx22, com α, β, γ ∈ C. Se eh2(0,1)6= 0, ent˜ao
γ 6= 0. No aberto afim x3 = 1 obtemos G = x20 +αx0x21 +βx0x1x2 +γx0x22 +
x3
1. Atribuindo os pesos 12, 1 3,
1
4 `as vari´aveis x0, x1, x2 respectivamente e usando o
Princ´ıpio do Reconhecimento conclu´ımos que G ∼ x2
0 +γx0x22 +x31. Considere o
isomorfismo de C-´algebras ϕ : C[[x0, x1, x2]] −→ C[[x0, x1, x2]] definido por x0 7−→
x0 +x22i, x1 7−→ x1, x2 7−→ λ1λ2x2 com λ21 = −2i e λ22 = γ−1. Segue que G ∼
x3
3. Sing(S) = Z(x0, x1) se, e somente se, eh2(0,1) = 0.
Como vimos em 1. R = [a : b : c : d] ´e um ponto singular se, e somente se, a =
b = c2eh
2(0,1) = 0. Assim, pondo a condi¸c˜ao eh2(0,1) = 0 temos que R ∈ Sing(S)
se, e somente se, a = b = 0. Segue que Sing(S) = Z(x0, x1). Reciprocamente, se
Sing(S) = Z(x0, x1), ent˜ao R = [0 : 0 : 1 : 0] ´e um ponto singular de S. Logo
satisfaz a condi¸c˜ao c2eh
2(0,1) = 0. Como neste caso c= 1, temos queeh2(0,1) = 0.
4. Se Sing(S) ={P}, ent˜ao Z(x0, x1) ´e a ´unica reta contida em S.
Considere o conjunto U12 = {[(1,0, a, b),(0,1, c, d)] ∈ G(2,4)| a, b, c, d ∈ C}. Seja
l ∈U tal que l ⊂S =Z(G), ent˜ao
G(s, t, sa+tc, sb+td) = 0,∀ s, t ∈C.
Da equa¸c˜ao acima obtemos o sistema em a, b, c, d
b+γa2 = 0
d+ 2acγ+βa= 0
γc2+α+βc = 0
1 = 0
Note que o sistema n˜ao admite solu¸c˜ao.
Considere o conjunto U13 = {[(1, a,0, b),(0, c,1, d)] ∈ G(2,4)| a, b, c, d ∈ C}. Seja
l ∈U13 tal que l ⊂S=Z(G), ent˜ao
G(s, sa+tc, t, sb+td) = 0,∀ s, t ∈C.
Da equa¸c˜ao acima obtemos o sistema em a, b, c, d
αa2+b+a3 = 0
d+βa+ 2αac+ 3a2c= 0
βc+αc2+γ+ 3ac2 = 0
c3 = 0
Das duas ´ultimas equa¸c˜oes obtemos γ = 0, o que contradiz a hip´otese de ser P o ´
unico ponto singular de S.
Considere o conjunto U14 = {[(1, a, b,0),(0, c, d,1)] ∈ G(2,4)| a, b, c, d ∈ C}. Seja
l ∈U14 tal que l ⊂S=Z(G), ent˜ao
G(s, sa+ct, sb+td, t) = 0,∀ s, t ∈C.
Da equa¸c˜ao acima obtemos o sistema em a, b, c, d
γb2+βab+αa2+a3 = 0
1 +βbc+βad+ 2αac+ 2γbd+ 3a2c= 0
βcd+αc2+γd2+ 3ac2 = 0
c3 = 0
Considere o conjunto U23 = {[(a,1,0, b),(c,0,1, d)] ∈ G(2,4)| a, b, c, d ∈ C}. Seja
l ∈U23 tal que l ⊂S=Z(G), ent˜ao
G(sa+tc, s, t, sb+td) = 0,∀ s, t ∈C.
Da equa¸c˜ao acima obtemos o sistema em a, b, c, d
ba2+αa+ 1 = 0
βa+a2d+ 2abc+αc= 0
2acd+bc2 +βc+γa = 0
c2d+γc= 0
Sec6= 0 reca´ımos no caso do abertoU12. Se c= 0 obtemos da terceira equa¸c˜ao que
a = 0. Substituindo a=c= 0 na segunda equa¸c˜ao obtemos 1 = 0. Logo o sistema n˜ao admite solu¸c˜ao.
Considere o conjunto U24 = {[(a,1, b,0),(c,0, d,1)] ∈ G(2,4)| a, b, c, d ∈ C}. Seja
l ∈U24 tal que l ⊂S=Z(G), ent˜ao
G(sa+tc, s, sb+td, t) = 0,∀ s, t ∈C.
Da equa¸c˜ao acima obtemos o sistema em a, b, c, d
βab+αa+γab2+ 1 = 0
a2+αc+βbc+βad+γb2c+ 2γabd= 0
2ac+βcd+ 2γbcd+γad2 = 0
c2+γcd2 = 0
Se d 6= 0 reca´ımos no caso do aberto U23. Se d = 0, obtemos c = 0 da quarta
equa¸c˜ao e a = 0 da segunda. Substituindo a = 0 na primeira equa¸c˜ao obtemos 1 = 0. Logo o sistema n˜ao admite solu¸c˜ao.
Considere o conjunto U34 = {[(a, b,1,0),(c, d,0,1)] ∈ G(2,4)| a, b, c, d ∈ C}. Seja
l ∈U34 tal que l ⊂S=Z(G), ent˜ao
G(sa+tc, sb+td, s, t) = 0,∀ s, t ∈C.
Da equa¸c˜ao acima obtemos o sistema em a, b, c, d
γa+βab+αab2+b3 = 0
a2+γc+αb2c+ 2αabd+ 3b2d+βbc+βad = 0
2ac+ 3bd2+βcd+ 2αbcd+αad2 = 0
c2+αcd2+d3 = 0
Se d6= 0, ent˜ao reca´ımos no caso do aberto U23. Se d= 0, obtemos a =b =c= 0.
Assim determinamos a reta l=P([(0,0,1,0),(0,0,0,1)]), que ´e a ´unica reta contida em S.
5. Segue da proposi¸c˜ao 3.1 que se Sing(S) = Z(x0, x1), ent˜ao existem infinitas retas
3.3
Caso 3: Posto de
f
2≥
2
.
Lembre-se que neste cap´ıtulo S =Z(F)⊂P3 denota uma c´ubica singular irredut´ıvel e reduzida. Como em (3.1) consideramos P = [0 : 0 : 0 : 1]∈Sing(S) e portanto
F(x0, x1, x2, x3) = x3f2(x0, x1, x2) +f3(x0, x1, x2).
Proposi¸c˜ao 3.5 Assuma que f2 6= 0, ent˜ao existe uma bije¸c˜ao entre FP ={l reta
⊂ P3| l ⊂ S e P ∈l} e A={[a0 :a1 :a2]∈P2| f2(a0, a1, a2) =f3(a0, a1, a2)}=Z(f1, f2).
Demonstra¸c˜ao: Para cada q = [q0 : q1 : q2] ∈ A, seja Q = [q0 : q1 : q2 : 0] ∈ S.
Mostremos que a reta lP Q pertence a FP. Com efeito, seja R= [sq0 :sq1 :sq2 :t] ∈lP Q.
Temos que
F(R) =ts2f2(q0, q1, q2) +s3f3(q0, q1, q2) = 0.
Assim temos uma aplica¸c˜ao ϕ bem definida que a cada q = [q0 : q1 : q2] ∈ A associa a
reta lP Q ∈ FP, com Q = [q0 : q1 : q2 : 0]. Reciprocamente, considere lP Q ∈ FP, com Q = [q0 :q1 :q2 :q3]. Se R ∈lP Q, ent˜ao R se escreve como R = [sq0 :sq1 : sq2 :sq3+t]
para algum [s : t] ∈ P1. Fazendo s = 1 e t = −q3 obtemos R1 = [q0 : q1 : q2 : 0] ∈ lP Q.
ComolP Q⊂S, temos queR1 ∈Se portantof3(q0, q1, q2) = 0. Fazendos= 1 et=−q3+1
obtemos R2 = [q0 : q1 : q2 : 1] ∈ lP Q. Como lP Q ⊂ S, temos que R2 ∈ S, e portanto
f2(q0, q1, q2) = 0. Logo q= [q0 :q1 :q2]∈A. Assim temos bem definida a inversaϕ−1.
Proposi¸c˜ao 3.6 Sejam S = Z(F) uma c´ubica singular irredut´ıvel e reduzida, P = [0 : 0 : 0 : 1] ∈ Sing(S) e l ⊂ S uma reta que n˜ao contem P. Seja π ⊂ P3 o ´unico plano
que cont´em l e P. Ent˜ao π ∩S = l∪l1 ∪l2, onde l1 e l2 s˜ao retas que cont´em P, n˜ao
necessariamente distintas.
Demonstra¸c˜ao: Afirmamos que P ´e um ponto singular da curva π∩S. Com efeito, j´a sabemos que a menos de uma mudan¸ca de coordenadas podemos supor P = [0 : 0 : 0 : 1] e F = x3f2 +f3, onde fi ∈ C[x0, x1, x2]i, i = 2,3. Seja π = Z(h) com h=ax0+bx1+cx2+dx3. ComoP ∈πtemos queh(P) = d= 0. Logoh=ax0+bx1+cx2.
Suponhamos sem perda de generalidade que c 6= 0, assim podemos finalmente escrever
h = x2 +αx1 +βx0. Considere a mudan¸ca de coordenadas T : P3 −→ P3 dada por
x0 7−→ x0, x1 7−→x1, x2 7−→ x2−αx0−βx1, x3 7−→ x3. Segue que T(P) = P, T•h = x2
e T•F = x3fe2 + fe3 onde fie ∈ C[x0, x1, x2]i, i = 2,3. Isto significa que a menos de
uma mudan¸ca de coordenadas podemos considerar h = x2. Escreva f2 = x2q1 +r2 e
f3 = x2q2+r3, onde qi ∈ C[x0, x1, x2]i e rj ∈ C[x0, x1]j, i = 1,2, j = 2,3, assim temos F =x2(x3q1+q2) +x3r2+r3. Segue que π∩S =Z(x2, F) =Z(x2, x3r2+r3). Logoπ∩S
´e a curva de equa¸c˜aoh3 =x3r2+r3 no plano π. Assim verifica-se facilmente queP ´e um
ponto singular de π∩S. Agora, como o plano π e a c´ubica S cont´em a reta l, segue que
π∩S =l∪C, onde C ´e uma cˆonica no plano π. Por outro lado, como P ∈π∩S eP 6∈l, temos que P ∈C. SendoP um ponto singular del∪C, segue queP ∈Sing(C). LogoC
´e redut´ıvel e portanto contem uma reta passando por P.
Proposi¸c˜ao 3.7 Nota¸c˜oes como em (3.1). Seja Q = [q0 : q1 : q2 : q3] 6= P outro ponto
singular de S. S˜ao verdadeiras as seguintes asser¸c˜oes.
2. Se P ´e uma singularidade isolada, ent˜ao Qe = [q0 :q1 :q2]6∈Sing(Z(f2)).
3. Se P ´e uma singularidade isolada, ent˜ao lP,Q∩Sing(S) ={P, Q}.
4. SeP ´e uma singularidade isolada e posto def2´e igual a 2, ent˜ao existe uma mudan¸ca
de coordenadas T : P3 −→ P3 tal que T(P) = P, T•x3 = x3, T•f2 = x0x1 e
T(Q) = [1 : 0 : 0 :qe3].
5. SeP ´e uma singularidade isolada e posto def2´e igual a 3, ent˜ao existe uma mudan¸ca
de coordenadas T : P3 −→ P3 tal que T(P) = P, T•x3 = x3, T•f2 = x21 −x0x2 e
T(Q) = [0 : 0 : 1 :qe3].
Demonstra¸c˜ao: Seja Qe = [q0 :q1 :q2].
1. SendoQ= [q0 :q1 :q2 :q3] um ponto singular deS =Z(F), comF =x3f2(x0, x1, x2)+
f3(x0, x1, x2) segue que f2(Qe) = ∂x∂F3(Q) = 0 e f3(Qe) = F(Q) = 0. Agora, seja
R = [sq0 :sq1 :sq2 :sq3+t]∈lP Q, temos queF(R) = (sq3+t)s2f2(Qe)+s3f3(Qe) = 0.
Logo lP Q⊂S.
2. Suponha que Qe ∈ Sing(Z(f2)), ent˜ao ∂f∂x2i(Qe) = f2(Qe) = 0, i = 0,1,2. Por outro
lado, como Q∈Sing(S) segue que Qe∈Sing(Z(f3)).
Agora, seja R = [sq0 :sq1 :sq2 :sq3 +t]∈ lP Q, temos que ∂x∂F3(R) =s
2f
2(Qe) = 0 e
∂F
∂xi(R) = (sq3+t)s
∂f2
∂xi(Qe) +s
2∂f3
∂xi(Qe) = 0, i = 0,1,2. Logo lP Q ⊂ Sing(S), o que contradiz a hip´otese de P ser uma singularidade isolada.
3. Seja R = [sq0 :sq1 :sq2 :sq3 +t]∈lP Q∩Sing(S). Ent˜ao ∂x∂Fi(R) = 0, i= 0,1,2,3.
Por outro lado, para i = 0,1,2 temos ∂F
∂xi(R) = s(sq3 +t)
∂f2
∂xi(Qe) + s
2∂f3
∂xi(Qe) =
s2[q
3∂f∂x2i(Qe) + ∂f∂x3i(Qe)] +st∂f∂x2i(Qe) = st∂f∂x2i(Qe). Logo st∂f∂x2i(Qe) = 0. Sabemos do item
2. que Qe 6∈ Sing(Z(f2)), isto ´e, ∂f∂x2i(Qe) 6= 0 para algum i = 0,1,2. Logo s = 0 ou
t = 0. Ses= 0 temos R =P, e se t = 0 temos R=Q.
4. Sendo o posto de f2 igual a 2 j´a temos do teorema A.4 que por uma mudan¸ca de
coordenadas podemos tomar f2 =x0x1. Seja Qe= [q0 :q1 :q2]. Como Qe ∈Z(x0x1),
segue que q0 = 0 ouq1 = 0. Por outro lado, temos do item 2 que Qe6∈Sing(Z(f2)),
e portanto q0 6= 0 ou q1 6= 0. Logo Q = [1 : 0 : qq20 :
q3
q0] ou Q = [0 : 1 :
q2
q1 :
q3
q1]. Se
Q= [1 : 0 : q2
q0 :
q3
q0], ent˜ao a matriz
A=
1 0 0 0 0 1 0 0
−q2
q0 0 1 0
0 0 0 1
induz uma mudan¸ca de coordenadas T: P3 −→ P3 com as propriedades desejadas. Se Q= [0 : 1 : q2
q1 :
q3
q1], ent˜ao a matriz
B =
0 1 0 0 1 0 0 0 0 −q2
q1 1 0
0 0 0 1