Un ive rs idade Fe de ral de San ta Catarin a Ce n tro Te cn o ló gico
De partam e n to de En ge n h aria Civil
Apostila de
Análise Estrutural I
Agosto de 2013
Grupo de Experim entação em Estruturas – GRUPEX
Un ive rs idade Fe de ral de San ta Catarin a Ce n tro Te cn o ló gico
De partam e n to de En ge n h aria Civil
Apostila de
Análise Estrutural I
Ângela do Valle
Henriette Lebre La Rovere
Nora Maria De Patta Pillar
Colaboração dos Bolsistas PET:
Alex Willian Buttchevitz
Alexandre Garghetti
André Ricardo Hadlich
Helen Berwanger
Stephanie Thiesen
Talita Campos Kumm
Valmir Cominara Júnior
Vanessa Pfleger
Andrei Nardelli
Brunela Francine da Cunha
1.1 Parâmetros que influenciam a concepção de sistemas estruturais ... 1.2 Classificação das peças estruturais quanto à geometria ... 1.3 Tipos de Vínculos ... 1.3.1 Vínculos no plano ... 1.4 Estaticidade e Estabilidade ... 1.5 Reações de apoio em estruturas planas ... 1.5.1 Estrutura Aporticada ... 1.5.2 Pórtico Isostático ... 1.5.3 Treliça Isostática ... 1.5.4 Pórtico Triarticulado Isostático ... 1.6 Reações de Apoio no Espaço ... 1.6.1 Treliça Espacial ... 1.6.2 Pórtico Espacial ... 2. ESFORÇOS INTERNOS EM ESTRUTURAS ISOSTÁTICAS ... 2.1 Treliças ... 2.1.1 Método de Cremona ... 2.1.2 Método de Ritter ... 2.2 Vigas ... 2.2.1 Vigas Simples – Método Direto para Diagramas ... 2.2.2 Vigas Gerber ... 2.2.3 Vigas Inclinadas ... 2.3 Pórticos ... 2.3.1 Estruturas Aporticadas ... 2.3.2 Pórticos Simples ... 2.3.3 Pórtico com Articulação e Tirante ... 2.3.4 Pórticos Compostos ... 2.4 Cabos ... 2.4.1 Reações de Apoio para Cabos ... 2.4.2 Esforços Normais de Tração Atuantes em Cabos ... 2.4.3 Conformação Geométrica Final do Cabo ... 2.5 Arcos ... 2.5.1 Arcos Biapoiados ... 2.5.2 Pórticos com Arcos (ou Barras Curvas) ... 2.5.3 Arcos Triarticulados ... 2.6 Grelhas ... 3. ESTUDO DE CARGAS MÓVEIS EM ESTRUTURAS ISOSTÁTICAS ... 3.1 Cargas Móveis – Trem-Tipo ... 3.2 O Problema a Resolver ... 3.3 Linhas de Influência – Definição ... 3.4 Obtenção dos Efeitos, Conhecidas as L.I. ... 3.5 Exemplos em Estruturas Isostáticas Simples ... 3.5.1 Viga Engastada e Livre ... 3.5.2 Viga Biapoiada ... 3.6 Análise de Efeitos ... 3.6.1 Teorema Geral ... 3.6.2 Obtenção de Momento Fletor Máximo em uma Seção S de uma Viga Biapoiada para um dado Trem-tipo Constituído de Cargas Concentradas ... LISTAS DE EXERCÍCIOS ... Graus de estaticidade ... Treliças ... Vigas ... Cabos ... Arcos ...
1.
INTRODUÇÃO
1.1. Parâmetros que influenciam a concepção de sistemas estruturais
A estrutura é conjunto formado pelas partes resistentes que garantem a estabilidade de um objeto de projeto, por exemplo, uma edificação. Quando se projeta uma estrutura, a análise do comportamento estrutural exige que sejam feitas algumas simplificações que conduzem a modelos estruturais. Para que se defina o sistema estrutural mais adequado, para uma determinada situação de projeto, devem ser considerados vários fatores. Os principais são:
• Projeto arquitetônico:
-Aspectos funcionais (dimensão do espaço interno, iluminação, limitações do espaço exterior, etc.);
-Aspectos estéticos (sistemas diferentes geram formas diferentes). • Carregamento atuante:
-Permanente;
-Variável Acidental; Efeito do vento.
• Condições de fabricação, transporte e montagem da estrutura (vias de acesso, içamento); • Material estrutural a ser utilizado (cada material possui características mecânicas
peculiares): o material deve estar adequado aos tipos de esforços solicitantes pelas estruturas.
Para identificação do sistema estrutural mais adequado deve-se: 1º) Identificar as possíveis opções;
2º) Analisar e comparar as vantagens e inconvenientes de cada um.
1.2. Classificação das peças estruturais quanto à geometria
Os sistemas estruturais são modelos de comportamento idealizados para representação e análise de uma estrutura tridimensional. Estes modelos obedecem a uma convenção. Esta convenção pode ser feita em função da geometria das peças estruturais que compõem o conjunto denominado sistema estrutural.
Barra: duas dimensões da mesma ordem de grandeza e uma terceira maior que as outras duas.
Barra de elementos delgados: as três dimensões principais são de diferentes ordens de grandeza. É o caso dos perfis metálicos, onde a espessura é muito menor que as dimensões da seção transversal, que é menor que o comprimento da peça. As barras de elementos delgados são tratadas, sob o ponto de vista estrutural, da mesma forma que as barras, exceção feita à solicitação por torção.
Folhas ou lâminas: duas dimensões de mesma ordem de grandeza, maiores que a terceira dimensão. Subdividem-se em:
Placas: carregamento perpendicular ao plano médio. Chapas: carregamento contido no plano médio. Cascas: superfície média curva.
1.3. Tipos de Vínculos
Vínculos são elementos que impedem o deslocamento de pontos das peças, introduzindo esforços nesses pontos correspondentes aos deslocamentos impedidos. Os deslocamentos podem ser de translação ou de rotação.
1.3.1 Vínculos no plano
No plano, um corpo rígido qualquer tem três graus de liberdade de movimento: deslocamento em duas direções e rotação.
a) Apoio simples ou de primeiro gênero:
Reação na direção do movimento impedido. Exemplo de movimento: rolete do skate.
b) Articulação, rótula ou apoio do segundo gênero:
Exemplo de movimento: dobradiça. c) Engaste: ou apoio de terceiro gênero:
Exemplo de movimento: poste enterrado no solo.
y
x
y
x
z
y
x M z=0
Rx =0
Ry=0
Rx Ry
Rx
Ry
y
x
M z=0
y
x
M z=0
Rx
Ry
M z
y
Vínculos no Plano
Tipo de Vínculo
Símbolo
_________ Reações_____
Cabo
Ligação esbelta
Roletes
Rótula
Tipo de Vínculo
Símbolo
________ _Reações_____
Articulação
Apoio deslizante
Luva rígida
θ
= M
K
Rigidez de uma Ligação
Rigidez à Rotação
geometria indeformada
geometria deformada
• Ligação Articulada
K → 0
• Ligação Rígida
K →
∞
θ≈ 0 o
• Ligação Semi-Rígida
0 < K <
∞
K =
M
Exemplos de Vínculos
Apoio rotulado em viga de ponte.
Apoio com material de baixo coeficiente de atrito, funcionando como roletes.
Rolete nos apoios de vigas de concreto protendido de uma ponte rodoviária.
Ligação de canto rígida de um pórtico de aço. Observam-se as chapas formando uma ligação rígida com os pilares.
Exemplo de planta baixa de uma construção:
Forças que atuam na viga 1 e na viga 6:
Nesse caso, as cargas distribuídas q1 e q2 são provenientes das lajes que se apoiam na viga 1.
1.4 Estaticidade e Estabilidade
a) A estrutura é restringida e o número de incógnitas é igual ao número de equações de equilíbrio: ISOSTÁTICA.
b) A estrutura é restringida e o número de incógnitas é maior que o número de equações de equilíbrio: HIPERESTÁTICA.
c) A estrutura não é restringida ou o número de incógnitas é menor que o número de equações de equilíbrio: HIPOSTÁTICA.
Uma estrutura está restringida quando possui vínculos para restringir todos os movimentos possíveis da estrutura (translação e rotação) como um corpo rígido.
Uma forma de calcular o grau de hiperestaticidade, a fim de descobrir se a estrutura é restringida, é usando a seguinte fórmula:
gh = C1 + 2 . C2 + 3 . C3 – 3 . m
Sendo C1 = número de vínculos de 1ª classe; C2 = número de vínculos de 2ª classe; C3 = número de vínculos de 3ª classe;
m = número de hastes presentes na estrutura.
Outra maneira de calcular é utilizando o critério apresentado por Sussekind: gh = ge + gi,
Sendo gh = grau de estaticidade ou hiperestaticidade; ge = grau de hiperestaticidade externa;
gi = grau de hiperestaticidade interna.
Tipos de Equilíbrio:
Estável Instável Indiferente
Exemplos: Estruturas Planas Vigas:
Quantidade de apoios: gh = C1 + 2 . C2 + 3 . C3 - 3 . m C1 = 1 C2 = 1 gh = (1) + 2 . (1) + 3 . (0) - 3 . (1) Número de barras: gh = 1 + 2 - 3
m = 1 gh = 0
ISOSTÁTICA
Quantidade de apoios: gh = C1 + 2 . C2 + 3 . C3 - 3 . m C3 = 1 gh = (0) + 2 . (0) + 3 . (1) - 3 . (1) Número de barras: gh = 3 - 3
m = 1 gh = 0
ISOSTÁTICA
Quantidade de apoios: gh = C1 + 2 . C2 + 3 . C3 - 3 . m C1 = 2 gh = (2) + 2 . (0) + 3 . (0) - 3 . (1) Número de barras: gh = 2 - 3
m = 1 gh = - 1
HIPOSTÁTICA (não restringida)
Quantidade de apoios: C1 = 2 C2 = 1 Número de barras:
m = 1
gh = C1 + 2 . C2 + 3 . C3 - 3 . m gh = (2) + 2 . (1) + 3 . (0) - 3 . (1)
gh = 2 + 2 – 3 HIPERESTÁTICA gh = 1
Quantidade de apoios: C1 = 3
Número de barras: m = 1
gh = C1 + 2 . C2 + 3 . C3 - 3 . m gh = (3) + 2 . (0) + 3 . (0) - 3 . (1)
Quantidade de apoios: C1 = 2 C2 = 1 Número de barras:
m = 2 Ligações internas:
C2 = 2 - 1 = 1
gh = C1 + 2 . C2 + 3 . C3 - 3 . m gh = (2) + 2 . (2) + 3 . (0) - 3 . (2)
gh = 2 + 4 – 6 ISOSTÁTICA gh = 0
Outra forma de resolver exercícios de grau de hiperestaticidade é através do grau de hiperestaticidade externa (ge) e do grau de hiperestaticidade interna (gi). Partindo do princípio que:
gh = ge + gi
i)Classificar os apoios e calcular o ge:
ge = C1 + 2 . C2 + 3 . C3 - 3 ge = (2) + 2 . (1) + 3 . (0) - 3 ge = 2 + 2 - 3
ge = + 1
ii)Classificar as ligações internas e calcular o gi:
gi = - 1 gh = ge + gi gh = 1 - 1 gh = 0
ISOSTÁTICA
A rótula interna é uma conexão C2
Para calcular o ge utiliza-se sempre m = 1. As ligações internas não entram no cálculo do ge.
Em ligações internas, considera-se o tipo de ligação e o número de barras conectadas menos 1.
Ligações internas :
Tirante (C1)
Articulação ou Rótula (C2)
Ligação engastada (C3)
Exemplos: Pórticos, Arcos; Pórticos:
Quantidade apoios:
C1 = 1 C2 = 1 gh = C1 + 2 . C2 + 3 . C3 - 3 . m Número de barras: gh = (1) + 2 . (2) + 3 . (1) - 3 . (3)
m = 3 gh = 1 + 4 + 3 - 9 Ligações internas: gh = - 1
C2 = 2 – 1 = 1 C3 = 2 – 1 = 1
Quantidade apoios:
C1 = 1 C2 = 1 gh = C1 + 2 . C2 + 3 . C3 - 3 . m Número de barras: gh = (2) + 2 . (2) + 3 . (1) - 3 . (3)
m = 3 gh = 2 + 4 + 3 - 9 Ligações internas: gh = 0
C1 = 2 – 1 = 1 C2 = 2 – 1 = 1 C3 = 2 – 1 = 1
ISOSTÁTICA
Quantidade de apoios: gh = C1 + 2 . C2 + 3 . C3 - 3 . m C2 = 1 C3 = 1 gh = (0) + 2 . (1) + 3 . (1) - 3 . (1) Número de barras: gh = 2 + 3 - 3
m = 1 gh = 2
HIPERESTÁTICA
Quantidade de apoios:
C1 = 1 C2 = 1 gh = C1 + 2 . C2 + 3 . C3 - 3 . m Número de barras: gh = (2) + 2 . (2) + 3 . (0) - 3 . (2)
m = 2 gh = 2 + 4 - 6 Ligações internas: gh = 0
C1 = 2 – 1 = 1 C2 = 2 – 1 = 1
ISOSTÁTICA
Quadros:
gh = C1 + 2 . C2 + 3 . C3 - 3 . m ge = C1 + 2 . C2 + 3 . C3 - 3 gh = (1) + 2 . (1) + 3 . (4) – 3 . (4) ge = (1) + 2 . (1) + 3 . (0) - 3 gh = 1 + 2 + 12 – 12 ge = 1 + 2 - 3
gh = 3 ge = 0
Logo: gh = ge + gi (3) = (0) + gi gi = 3
A partir do exemplo acima, pode-se notar que o gi de uma estrutura fechada, nesse caso um quadro, é igual a 3. Independentemente de sua forma geométrica.
Utilizando o conhecimento em quadros, calcula-se o grau de hiperestacidade externa (ge) e o grau de hiperestacidade interna (gi) separadamente com a finalidade de obter o valor do grau de hiperestacidade (gh).
gh = ge + gi
i)Classificar os apoios e calcular o ge:
ge = C1 + 2 . C2 + 3 . C3 - 3
ge = (1) + 2 . (1) + 3 . (0) - 3 ge = 1 + 2 - 3
ge = 0
ii)Classificar as ligações internas, contar o número de quadros e calcular o gi:
gi = 3 . Q - C1 - C2
gi = 3 . (1) – (2) – (1) gi = 3 – 2 - 1
gi = 0
gh = ge + gi gh = (0) + (0) gh = 0
ISOSTÁTICA Exemplos:
ge = C1 + 2 . C2 + 3 . C3 – 3 ge = (2) + 2 . (1) – (3) = 1
gi = 3 . Q – C1 – C2
gi = 3 . (7) – (2) – (3) = 16
gh = ge + gi
gh = (1) + (16) = 17
ge = C1 + 2 . C2 + 3 . C3 – 3 ge = (2) + 2 . (1) + 3 . (1) – (3) = 4
gi = 3 . Q – C1 – C2
gi = 3 . (7) – (2) – (4) = 16
gh = ge + gi
gh = (4) + (16) = 20
HIPERESTÁTICA Restringida
ge = C1 + 2 . C2 + 3 . C3 – 3 ge = (1) + 2 . (2) + 3 . (2) – (3) = 8
gi = 3 . Q – C2
gi = 3 . (12) – (11) = 25
gh = ge + gi
gh = (8) + (25) = 33
1.5. Reações de apoio em estruturas planas
1.5.1. Estrutura Aporticada
Cos α =4/5
Sen α =3/5
Decompor a força de 10kN nas direções x e y:
i) ∑FX = 0 HA + 6kN = 0 ∴HA = - 6kN
ii) ∑FY = 0 VA + VB = (10x3) + 8 = 38kN
iii) ∑MA = 0 7xVB – (30x 5,5)- (8x2) – (6x1,5) = 0 ∴7VB = 190 ∴ VB = 27,14kN 0
Logo, VA = 38kN – 27,14kN = 10,86kN
Outra maneira seria:
∑MA = 0
7VB – (30x 5,5)- (10x2,5) = 0 ∴7VB = 165+25 = 190 ∴VB = 27,14kN
Verificação: ∑MB = 0
(10,86x7) + (6x3) – (30x1,5) – (8x5) – (6x1,5) = 0 76 + 18 – 45 – 40 – 9 = 0
Y
X
α
1 0 x ( 3 / 5 ) = 6 k N
1.5.2. Pórtico Isostático
i) ∑FX = 0 -HA + 40 = 0 ∴HA = 40kN
ii) ∑FY = 0 VA + VB = 60kN
iii) ∑MA = 0 8VB + 80 - (40x6) – (60x4) = 0 ∴8VB = 400 ∴ VB = 50kN ∴VA = 60 – 50 = 10kN
Verificação: ∑MB = 0 (10x8) + (40x3) – 80 – (60x4) + (40x3) = 0 120 + 120 – 240 = 0
1.5.3. Treliça Isostática
i) ∑FX = 0 HB + 4 -12 = 0 ∴HB = 8kN
ii) ∑FY = 0 VA + VB = 6 + 8 = 14kN
iii) ∑MB = 0 (4x4) + (8x1,5) – (12x2) – 3VA = 0 ∴3VA = 16 + 12 – 24 = 4
∴VA = (4/3) = 1,33kN ∴VB = 12,67kN
Verificação: ∑MA = 0
(12,67x3) + (4x4) – (6x3) – (8x1,5) - (12x2) = 0 38 + 16 -18 -12 – 24 = 0
VA
HA VB
B
A
8 0 k N m 6 0 k N
4 0 k N
4 .0 0 m 4 .0 0 m
3 .0 0 m
3 .0 0 m
VA VB
HB
4 k N
1 .5 0 m 1 .5 0 m
2 .0 0 m
2 .0 0 m
6 k N
8 k N
1.5.4. Pórtico Triarticulado Isostático
i) ∑FX = 0 (→+ ) HA + HB +20 -12 = 0 ∴HA+ HB = -8kN
ii) ∑FY = 0 (↑+ ) VA + VB = 10x4 = 40kN
iii) ∑MA = 0 4VB - (40x2) + (12x2) – (20x4) = 0 ∴4VB = 80 – 24 + 80 ∴ VB = 34kN ∴VA = 40 – 34 = 6kN
iv) Momento Fletor em C é nulo (Esq. Ou Dir.)
Análise da Estrutura à Esquerda da Rótula:
Verif. ∑MD = 0 (6 + 2)x4 + (12x2) + (6x4) – (40x2) = 0 32 + 24 +24 – 80 = 0
• 4 Incógnitas (Reações) • 3 Equações Estáticas (Plano) • 1 Equação interna (Rótula)
MCD = MCE = 0
Isostática
MC – (6x2) + (20x1) + (HAx4) = 0 ou MC = (6x2) – (20x1) – (4HA) mas MC = 0 → 4HA= 12 – 20 = -8
∴HA = – 2kN
∴HB = –8 + 2 = -6kN 2 .0 0 m
A
B
B
V
AH
AH
B1 2 k N
4 .0 0 m
C
D
2 0 k N
2 .0 0 m 2 .0 0 m
HA
VC
MC
NC
2 0 k N
2 .0 0 m
Exercícios: Determinar a reação de apoio.
i) ∑FX = 0 (→+ ) RAX - RBX = 0 ∴ RAX = RBX (I)
ii) ∑FY = 0 (↑+ ) RAY - RBY - 20 - 112= 0 ∴ RAY + RBY = 132 (II)
iii)∑MA = 0 (20x8) + (112x4) – (6xRBX) = 0
RBX = 160 + 448 ∴ RBX=101,33kN 6
RAX = RBX (I) ∴ RAX=101,33kN
RAX = RAY (45º) ∴ RAY=101,33kN
RBY = 132 - RAY (II) ∴ RBY=30,67kN
RA = RAX/cos 45º ∴ RA= (RAX)x 2 = 143,30kN 2
Conferindo
∑MC = 0 (20x2) - (112x2) + (6xRBY) – (6xRAX) + (6xRAY) = 0 40 – 224 + (30,67x6) – (101,33x6) + (101,33x6) = 0 -184 + 184 – 608 + 608 =0
184 – 184 = 0 a)
4
R
AR
A C2 0 k N
A
B
1 1 2 k N RBY
RBX
RAX
RAY
1 4 k N / m
2 0 k N
C B
A
6 .0 0 m 6 .0 0 m
i) ∑FX = 0 (→+ ) RAX = RBX
ii) ∑FY = 0 (↑+ ) RAY – 12(12) – 30 ∴RAY = 174kN
iii) ∑MA = 0 12xRBX – 30x20 – 144x6 = 0
RBX = 600 + 864 ∴RBX = 122kN ∴RAX = 122kN 12
Conferindo
∑MB = 0 12xRAX – 144x6 – 30x20 = 0
1464 – 864 – 600 = 0
∑MC = 0 6xRBX – 144x14 + 6xRAX – 20xRAY = 0 122x6 + 2016 + 122x6 – 174x20 = 0 732 + 2016 + 732 – 3480 = 0
c) Achar as reações de apoio para a viga abaixo :
B A
3 .0 0 m 6 .0 0 m 3 .0 0 m 3 .0 0 m
1 6 k N / m 8 k N
45° 45°
1 0 2 k N 1 0 2 k N
b)
1 2 k N / m
A
B
C C
B A
1 4 4 k N
3 0 k N RAX
RAY
RBX
6 .0 0 m
6 .0 0 m
8 .0 0 m 1 2 .0 0 m
8 1 4 4
3 4 3 4
1 1 1 ,3 3 1 0 8 ,6 7
5 4
5 4 k N .m A B
9 .0 0 m
Balanço
d) Determinar as reações de apoio para a viga:
Viga entre as rótulas internas:
72 ↑ ↑ (144/2) = 72
34 ↑ ↑ 10 + 24 = 34
(8x3)/9 = 2,67 ↑ ↑ (8x6)/9 = 5,33
108,67 ↑ ↑ 111,33
6 ↑ ↑ (12/2) = 6
6 ↑ ↑ 6 + 8 = 14
2,67 ↑ ↑ (20-12)/3=2,67
1 0 k N
1 0 k N
3 x ( 1 6 / 2 ) = 2 4 k N 1 0 2 k N
3 incógnitas N1, N2, N3
3 equações: ∑FX = 0, ∑FY = 0, ∑FZ = 0
1.6. Reações de apoio no espaço 6 Equações de Equilíbrio:
∑FX = 0; ∑FY = 0; ∑FZ = 0; ∑MX = 0; ∑MY = 0; ∑MZ = 0
1.6.1. Treliça Espacial
Isostática r + b = 3n Restringida
n=4
r+b=3n 9+3 = 3x4
12=12
Inicia-se pelo equilíbrio do nó D:
Em seguida passa-se aos nós com apoios: Conhecidos agora os esforços N1, N2 e N3, para cada nó A, B ou C existem 3 incógnitas (Reações) e 3 equações de equilíbrio.
D
C
B
A
1
2
3
4 tf
2 tf
R
AZR
AXR
AYR
BYR
BXR
BZR
CYR
CX1.6.2. Pórtico Espacial
5 .0 0 m
4 .0 0 m
RAZ
MAZ
RAY
MAY
RAX MAX
2 t f 1 t f 4 t f
3 .0 0 m
Y
X
Z
6 reações
Isostática 6 equações de equilíbrio Restringida
i) ∑FX = 0 RAX – 2tf = 0 ∴RAX = 2tf
ii) ∑FY = 0 RAY – 4tf = 0 ∴RAY = 4tf
iii) ∑FZ = 0 RAZ – 1tf = 0 ∴RAZ = 1tf
iv) ∑MX = 0 MAX – (4x3) – (1x5) = 0 ∴MAX = 17tfm
v) ∑MY = 0 MAY + (2x3) + (1x4) = 0 ∴MAY = -10tfm
2.
ESFORÇOS INTERNOS EM ESTRUTURAS ISOSTÁTICAS
2.1. Treliças
Treliças - Estruturas reticuladas, ou seja formadas por barras (em que uma direção é predominante) de eixo reto, ligadas por rótulas ou articulações (nós).
Quando submetidas a cargas aplicadas nos nós apenas, as barras estão submetidas somente a esforços axiais.
Estaticidade e Estabilidade:
Condições para obtenção de uma treliça isostática:
1. equilíbrio Estável (Restringida, nós indeslocáveis);
2. número de incógnitas (*) igual ao número de equações de equilíbrio da estática (**).
* O número de incógnitas é dados por:
número de reações (r) + número de barras (b). (Incógnitas Externas) (Incógnitas Internas) ** Número de equações de equilíbrio é o resultado do:
- número de nós (n) x 2 (o valor é multiplicado devido a existência de uma equação no eixo x e outra no y).
Desta forma, podemos classificá-las da seguinte maneira:
1a. Condição 2a. Condição Classificação
indeslocável e r + b = 2n Isostática
indeslocável e r + b > 2n Hiperestática
deslocável ou r + b < 2n Hipostática
Os métodos de obtenção de esforços em treliças são: 1. Equilíbrio dos Nós;
Treliças Planas
Fonte: Engel, Heino, 1981
Sentido dos Esforços
Treliça com diagonais comprimidas
Treliça com diagonais tracionadas
Fonte: Salvadori, Heller, 1975
A
I E O' B F M
N H
D O
C G
L
W4 W2 W1 W3 W5
W4 W2 W1 W3 W5
A
I E O' B F M
N H
D O
C
D
Transmissão de Cargas para as Treliças Treliça de Cobertura
Treliça de Ponte
Fonte: Süssekind, José Carlos, 1979, vol.1
Ligações das Extremidades das Barras
Mecanismo de Treliças Aplicado a Outros Sistemas Estruturais
Pórtico de Treliça Biarticulado
Pórticos de Treliça Triarticulado com Balanços
Treliças com Diferentes Condições de Apoios
Treliças apoiadas nas duas extremidades: Estrutura de vão livre
Treliças com Apoio Duplo no Centro: Estruturas em Balanço
Treliças com Extremidades em Balanço: Estrutura com Vão Livre e Balanço
Lei de Formação de Treliças Isostáticas:
r + b = 3 + 11 = 14 2n = 2 x 7 = 14
Treliça Hiperestática:
r + b = 4 + 14 = 18 2n = 2 x 8 = 16
Treliça Hipostática:
r + b = 4 + 18 = 22 2n = 2 x 10 = 20
Treliça não restringida
A B
C D
A B E G
1 2
3 7
4 8
6 9 10
2.1.1. Método de Cremona
Seja a seguinte treliça para a qual serão calculadas as reações e esforços pelo equilíbrio dos nós:
∑FX = 0 3 – RAX = 0 RAX = 3tf
∑MA = 0 3RBY– 6 x 1,5 – 3 x 2 = 0 RBY = 5tf
∑FY = 0 RAY + 5 - 6 = 0 RAY = 1tf
ϴ = 53,13º Nó A
∑FY = 0
1 + NACx sen 53,13º = 0 NAC = -1,25tf ∑FX = 0
-3 – 1,25 x cos 53,13º + NAB = 0 NAB = 3,75tf
Nó B
∑FY = 0
1,5m 1,5m
3tf
3tf
5tf 1tf
6tf
-1,25
3,75
-6,25
B A
C
2m
Se um nó está em equilíbrio, a soma vetorial de todas as forças que atuam sobre ele será nula:
Nó A:
3
3,75 1,25
1
Nó B:
5
3,75
6,25
Nó C:
A 3 tf
1tf
1,25
3,75
B
6,2 5
3,75
1,25
6,25 6
3
A soma vetorial das forças externas e internas atuantes forma sempre um polígono fechado. O método de Cremona consiste em encontrar os esforços internos graficamente, a partir do equilíbrio dos nós da treliça, seguem-se os seguintes passos:
• inicia-se por um nó com apenas duas incógnitas;
• marca-se em escala as forças externas atuantes, formando um polígono aberto;
• pelas extremidades deste polígono traçam-se paralelas às barras que concorrem no nó, cujos esforços desejamos conhecer;
• a interseção destas paralelas determinará o polígono fechado de equilíbrio; obtêm-se assim os módulos e sinais dos esforços nas barras;
• Os sinais dos esforços são obtidos verificando-se:
- se o esforço normal aponta para o nó negativo (compressão); - se o esforço normal sai do nó positivo (tração);
• O sentido do percurso de traçado de forças é arbitrário, adotaremos o sentido horário;
• Obtém-se 2 a 2 incógnitas na análise sobrarão 3 equações de equilíbrio, já usadas para as reações.
6tf
3tf C
1,25
2.1.1.1. Notação de Bow
Marcar com letras todos espaços compreendidos entre as forças (exteriores e interiores), que serão identificadas pelas duas letras adjacentes. No exemplo:
• reação Vertical no nó A : ab; • reação Horizontal no nó A: bc;
• esforço Normal na Barra AC: cf (ou fc); • esforço Normal na Barra AB: af (ou fa).
Roteiro do Método:
1. Iniciar o traçado do Cremona pelo equilíbrio de um nó que contém somente duas barras com esforços normais desconhecidos (incógnitas);
2. Começar com as forças conhecidas, deixando as incógnitas como forças finais;
3. Todos os nós são percorridos no mesmo sentido (horário ou anti-horário), para o exemplo escolheu-se o horário;
4. Prosseguir o traçado do Cremona pelos nós onde só haja 2 incógnitas a determinar, até esgotar todos os nós, encerrando-se a resolução da treliça.
5. Os valores dos esforços nas barras são medidos no gráfico em escala; 6. Os sinais dos esforços são obtidos verificando-se:
- se o esforço normal aponta para o nó: COMPRESSÃO (-); - se o esforço normal sai do nó: TRAÇÃO (+).
Fonte: Süssekind, José Carlos, 1979, vol.1
e
2P
i
a g f
c
b
A C D
d
3P
F E
3P
P
B
h
3P
2
1
4
8
5
6
9 7
3
Nó A:
2P
3P
N
7a2
a7
N
22P 3P
N2
N7
Medir em escala N2 e N7 Nó E:
N2 conhecido - N3,N1 incógnitas: mede-se em escala
N
2N
1N
3a3
a1
N
1 (Compressão)Exemplos: 1.
2m
2m
C D
B A
1m
1m
2 tf
A
1m 1m
B D
C
2000kgf
c
b d e
a
1000kgf
1000kgf
Nó D:
Nó B:
2000 D
C 2000
2830 2830
C
T T
2830 2830
2000 2000
d
c
e
b
A B
D
C
2000kgf
-2830
+2000
-2830
+2230 +2230
a b
c d
e
Escala do Cremona (tf)
2
1
2.
A
D
C E B
H G
F
2tf
2tf
2tf
3tf 3tf
b
c d
e
f
a k
j i h
g
0 1 2 3 4
Escala do Cremona (tf) f,k
j
c a d
e h,i
g
-6,7 -6,7
-5,85
-1,8 +2,0
+6,0 +4,0 +4,0 +6,0
-1,8 +2,0
3. 6tf 6tf 6tf 2tf 2tf 2tf 6tf 6tf 6tf 2tf 2tf 2tf i b h g j k a e d c f 6m 6m 6m 6m 6m G E C A B D F -3,2 +3,2 +2,0 -2,2 -3,2 -4,8 -2,9 -2,0 +6,4 +4,8 +3,0 a k j e d c b,f g i h
2.1.2. Método de Ritter
Seja a seguinte treliça:
Suponhamos que deseja-se determinar os esforços axiais nas barras 3, 6 e 10. Parte-se a estrutura em duas partes, de forma a partir estas barras, através da seção SS indicada.
Considerando a parte da esquerda, deve-se colocar os esforços internos axiais que surgem nas barras para estabelecer o equilíbrio:
As forças N3, N6 e N10 representam a ação da parte da direita da treliça sobre a parte da esquerda.
H
AV
AP
4P
1P
2D
N
6N
10N
3S
S
1
2 3
7
4 8
6
9 10 11
5
H
AP
4P
1P
2P
DP
5É indiferente considerar a parte da esquerda ou a da direita:
Os esforços indicados N3, N6 e N10 são iguais em módulo e direção, mas têm os sentidos opostos dos que aparecem na parte esquerda. Representam a ação da parte esquerda sobre a parte da direita.
Para obter os esforços N3, N6 e N10 utilizam-se as equações da estática, devendo ser escolhidas e usadas numa ordem tal que permita determinar cada incógnita diretamente.
Para o exemplo, pode-se resolver utilizando: ΣMC = 0 Obtém-se N3;
ΣMD = 0 Obtém-se N6;
ΣFy = 0 Obtém-se N10. (tanto faz pela esquerda ou direita)
Se os esforços forem positivos terão o sentido indicado (tração) senão terão sentido inverso (compressão).
Observações:
1. seções de Ritter não podem interceptar 3 barrras paralelas, nem 3 barras concorrentes no mesmo ponto;
2. as seções podem ter forma qualquer (não necessitando ser retas);
3. para barras próximas às extremidades da treliça (no exemplo, barras 1, 5, 4 e 7), pode ocorrer que a seção de Ritter só intercepte 2 barras neste caso obter os esforços fazendo equilíbrio dos nós.
P
3V
BP
5C
S
S
N
6N
10Exemplos:
1. Obter os esforços nas barras 2, 3, 9 e 10.
I. Obter as reações de apoio: ΣFx = 0 HA = -6 tf;
ΣFy = 0 VA + VB = 10 tf;
ΣMA = 0 VB . 10 - 6 x 4 - 4 x 6 - 6 x 2 = 0; VB = 6 tf e VA = 4 tf.
II. Seção S1S1
ΣMH = 0 N2 x 2 - 6 x 2 - 4 x 4 = 0 N2 = 14 tf (tração);
ΣMD = 0 -N16 x 2 - 6 x 2 - 4 x 4 = 0 N16 = -14 tf (compressão);
ΣFy = 0 - N9 – 6 + 4 = 0 N9 = -2 tf (compressão).
8 9 10 11 12 13 14
7 6
1 2 3 4 5
HA
VA VB
A C D E F B
G H I J
15 16 17
2 m 2 m 2 m 2 m 2m
4 tf 6 tf
6 tf
S1 S2
S2
S1
III. Seção S2S2
ΣFx = 0 N3 + N10 cos45º = 14 tf; ΣFy = 0 N10 sen45º + 4 - 6 = 0;
N10 = 2,83 tf e N3 = 12 tf.
6tf
E
F
B
J
4
tf2 m
I
S
2N
10N
314
tfObter os esforços nas barras 2, 10, 19, 3 e 13.
I. Seção S1S1
ΣMD = 0 N19 x 2 + 6 x 2 + 5 x 4 = 0 N19 = -16 tf (compressão);
ΣFx = 0 N19 + N2 = 0 N2 = 16 tf (tração);
ΣFy = 0 N10 + 6 - 5 = 0 N10 = -1 tf (compressão); HA =6tf
6tf
6tf
VB=5tf
H I J K L
B G
F E
D C
A
2 m
1
7 8 9
19
2 3 4 5 6
18 20 21
17
10 11 12 13 14 15 16
S 1
S 2 S 3
VA=5tf
4tf
2 m 2 m 2 m 2 m 2 m
2 m
A
C
1 8 7
6tf
5tf
9
2
10
H
6tf 18 I
S 1
6tf
N 2
N 10
N 19 J
II. Seção S2S2
ΣMJ = 0 N3 x 2 + 6 x 2 - 5 x 6 - 6 x 2 = 0 N3 = 15 tf (tração);
II. Seção S3S3
ΣFy = 0 N13 cos45º + 5 = 0; N13 = -7,1 tf (compressão);
6tf
A
C
1 8 7
5tf
D
9
2 3
10 11
H
6tf
18I
19J
S
26tf
N
19N
3N
11F
4
13 14
B
G
5 6
15 16 17
5tf
20
K
S 3
21
L
N 20
N 4
N 13
2.2. Vigas
2.2.1. Vigas Simples - Método Direto para Diagramas
Esqu e r da
V
N M
N
D ir e it a V
Convenção de sinais: Revisão:
a
V V
F
M
a
F M
Esquerda com carga para cima Esquerda com carga para baixo
V – F = 0 V = +F positivo. V + F = 0 V = - F negativo. M – F.a = 0 M = +F.a positivo. M + F.a = 0 M = - F.a negativo.
a F
a
F
Direita com carga para cima Direita com carga para baixo
V + F = 0 V = - F negativo. V – F = 0 V = +F positivo. M - F.a = 0 M = +F.a positivo. M + F.a = 0 M = - F.a negativo.
• Traçar DMF vindo pela esquerda, calculando M nos pontos de aplicação de força concentrada.
Lembrando:
• Força Concentrada: Descontinuidade no DEC • Binário Aplicado: Descontinuidade no DMF
q=0 ; (entre cargas conc.)
• V Constante
• M Varia Linearmente em x
q= k ;
• V Varia Linearmente em x
• M Varia Parabolicamente em x
Integrando q V; Integrando V M.
dx dV q=
−
dx dM = V
dx
d
M q 22
Exemplo 1:
MCEsq = 60.4 = 240 kN;
MDEsq = 60.8 – 50.4 = 280 kN;
MEDir. = 110.2 = 220 kN ou
MEEsq. = 60.11 – 50.7 – 30.3 = 220 kN
ou MD = MC + VC x4m ou MEEsq. = MD +VD x3m
DMF (kN.m) 6 0 k N
6 0
2 8 0 2 4 0
(+)
2 2 0
- 1 1 0 1 0
- 2 0
DEC (kN) 1 1 0 k N
3 0 k N
5 0 k N 9 0 k N
4 m 4 m 3 m 2 m
A
C D E
DMF (kN.m)
+3
-3
(-)
3kN
DEC (kN)
-9
3kN
12kN/m
3 1 m
A
B
C
Exemplo 2:
Exemplo 3:
MCEsq = 18.2 = 9 kN;
MMÁX = q.l2/8 + 36 = 12.32/8 + 36 = 13,5 + 36 MMÁX = 49,5 kN.m
36
(+)
18
V=0
(+)
18kN 12kN/m
DMF (kN.m)
36
DEC (kN)
-18
(-)
18kN
2 m 3 m 2 m
Mmáx
A B
Exemplo 4:
MV=0Esq = 80.2 – 40.1 = 120 kN; MEDir = 60.1 = 60 kN;
MCEsq = 80.4 – 80.2 – 40.2 = 80 kN; MDDir = 60.2,5 – 20.1,5 = 120 kN; MDEsq = 80.5,5 – 80.3,5 – 40.3,5 = 20 kN;
-40
120 80
120
60
DMF (kN.m) -60
20 (-) (+)
40 80 kN
80
DEC (kN) 60 kN 100kN.m
20kN/m 40kN
20kN
(+)
2 m 2 m 1,5 m 1,5 m 1 m
A B
C D E
10
2.2.2. Vigas Gerber
• Aplicações principais – Pontes;
• Surgiram por motivos de ordem estrutural e de ordem construtiva;
• Vigas Gerber Isostáticas serão decompostas nas diversas vigas isostáticas que as constituem:
- Vigas com estabilidade própria; - Vigas que se apoiam sobre as demais;
Exemplos de Decomposição:
Os algarismos romanos I, II, III e IV indicam a ordem de resolução, para obtenção das reações de apoio.
• Começa-se a resolver as vigas sem estabilidade sem estabilidade própria; • Os diagramas podem ser traçados separadamente, juntando-os em seguida;
• As rótulas transmitem forças verticais e horizontais, mas não transmitem momento; • Basta que um dos apoios resista a forças horizontais na viga Gerber. Apenas as cargas
verticais provocam esforço cortante e momento fletor nas vigas, portanto, na decomposição não é necessário distinguir apoios do 1o ou 2o gênero. Usaremos
apenas: ∆
II
I
II II
IV
III
II
I
Esforços Internos – Diagramas – Exemplos: 1.
18 tf F
F
6tf 6tf
6tf
22,67 tf B
A
9,33 tf 4tf/m
C D E
4tf/m
6tf 6tf
4tf/m B
A 6tf
C D E
4tf/m
36 tf.m
MA = 0
MBesq = -6 x 2 = -12
MCesq = -6 x 5 + 9,33 x 3 – 12 x 1,5 = -20
MDesq = -6 x 7 + 9,33 x 5 – 20 x 2,5 + 22,67 x 2 = -0,01 ≈ 0 OK
O momento fletor na rótula é sempre nulo, a não ser que haja um binário aplicado na rótula. MEdir = -36 + 18 x 3 – 12 x 1,5 = 0 OK
MFdir= -36
Quando na rótula não há força concentrada:
Vdesq = Vddir Veesq = Vedir -8,67
A
-12
-20
C B
-6
-36
4,5
D E F
-18 -6
14
3,33
6
DMF (tf.m) DEC (tf)
2 4,5
2.
4+6+3 =
13 tf
3 tf
3+3 = 6 tf
3 tf
3 tf
2+4+3+2=
11 tf
3 tf
11 tf
3 tf
4 tf
12
6
6 tf
2 tf/m
3 tf/m
3 tf
A
2 tf/m
B
C
3 tf/m
F
D
E
4 tf
3 tf
H
G
4-3=
1 tf
8 tf
8 tf
J
I
2 tf/m
3 m 1 m 2 m 2 m 1 m 2 m 2 m 2 m 2 m
Pela esquerda:
MA = 0 MB = 0
MA/Besq = (q l2) / 8 = (2.32) / 8 = 2,25 MCesq = - 3.1.- 2.0,5 = - 4 MDesq = -4+ (2.42)/8 + (4.4)/4 = 4
Pela direita:
MJ = 0 MIdir = 1.2 = 2
MHdir = 1.4 – 8.2 = -12 MG = 0
MF/G = (q l2) / 8 = (3.22)/8 = 1,5 MF = 0
A B C 4D E F G H
-4 3
-5 -3
-4
-12 -6
-2
3 2
-6 -3 6
5
7
J I
2
DMF (tf.m) -1
DEC (tf)
2.2.3. Vigas Inclinadas
Independente do valor de b, as reações verticais serão iguais (= q.a / 2) 1.
Esforços Internos: Seção S (a x do apoio A)
α −
= q.x .cos
2 a . q
V α
− −
= q.x .sen
2 a . q N − = 2 x . q x . 2 a . q M 2 (q.a)/2 S V (q.a)/2
q.x M N
Diagramas:
q.a .( se n / 2
- q.a .( se n / 2
q.a .( cos / 2
( + )
( - ) ( - )
( + )
DMF
- q.a ( cos / 2
DEC DEN
2.
I. ΣFx = 0 HA = q.b Esforços Internos:
II. ΣFy = 0 VA = VB
III. ΣMA = 0
a.VB – qb.b/2 = 0 VB = qb2/2a = VA
(q.b²)/2.a
S
q.x
M
N
V
q.b
x
x/2
y
N = (qb – qx)cosα + (qb2/2.a) . senα
V = (qb – qx)senα - (qb2/2.a) . cosα M = x.qb – qx2/2 – y.(qb2/2.a)
M = x.qb – qx2/2 – x.(a/b).(qb2/2.a) M = qbx/2 – qx2/2
A
V
AV
BS
B
q
H
Aa
b
Diagramas:
q.b.[cosα+(b.senα)/2.a
q.b².(sen α)/2.a
q.b.(sen α – b.cos α / 2.a)
(qb2/2.a) . cosα
q.b²/8
DEN
DEC
3.
R = q . (a² + b²)
A
q
B
A
B
q
q.b
q
q.a
A
B
b
Logo, o diagrama de momento fletor fica:
q.( a ² + b² ) / 8
Se tivermos, por exemplo, as estruturas:
DMF
-6
A 6 tf.m
2
6
DMF
1 tf/m
2 tf.m B
8m
6m
-2
52,5
A
(+)
DMF (-)
-20
20 kN/m
B20 kN.m
4m
3m
2.3. Pórticos
Pórticos são estruturas lineares constituídas por barras retas ligadas entre si. Eles podem ser planos (bidimensionais) ou espaciais (tridimensionais). Nesta apostila trabalharemos apenas com pórticos planos.
Nos pórticos, as ligações entre as barras são engastes ou rótulas internas. Isso faz com que sua estrutura trabalhe em conjuntos e não de forma individual como acontece em estruturas de colunas e vigas.
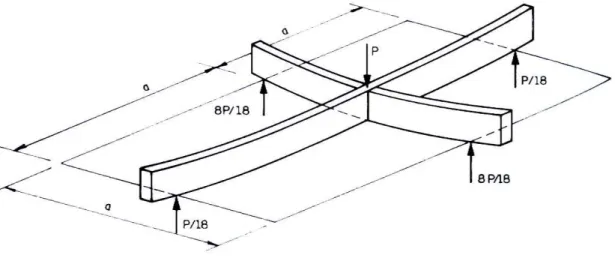
2.3.1. Estruturas Aporticadas
1
,5m
1
,5m
27,14 kN
10 kN/m
10,86 kN
6 kN
S
2S
110 kN
S
32m 3m
2m
y
x
6 kN
10,86 kN
N
M
V
S
1t
n
Seção S1: ΣFn = 0
N – 6.cosα + 10,86.senα = 0
N = 6.cosα - 10,86.senα N = -1,72 kN (const.)
ΣFt = 0
V = 6.senα + 10,86.cosα = 12,29 kN (const.)
ΣMz = 0
M = 10,86.x + 6.y y = x.tgα M = 10,86.x + 4,5.x = 15,36.x Para x=0, M=0;
Seção S2:
N = -1,72 kN (const.)
V = 12,29 - 10 = 2,29 kN (const.)
M = 15,36.x –8(x-2) –6(y-1,5) = 2,86.x + 25 y = x.tgα Para x=2, M=30,72 kN.m;
x=4, M=36,44 kN.m;
Seção S3: (direita)
10 kN/m
27,14 kN
M
V
x'
V = 10.x’ – 27,14
Para x’=0, V=-27,14 kN; x’=3, V=2,86 kN;
M = 27,14.x’ – 10.x’2/2 Para x’=0, M=0 kN.m;
Diagramas:
-27,14
(+)
12,29
2,86
2,29
(+)
(-)
-1,72
(-)
nulo
x = (10x3²)/8 = 11,25
DMF (kN.m)
DEC (kN)
DEN (kN)
30,72
36,42
36,42
Não havendo barras inclinadas, recomeça-se o traçado de diagramas pelo método direto. 10 kN/m
17 kN 12 kN
DMF (kN.m) DEC (kN) DEN (kN)
(-)
(+)
(-)
12
12 kN
nulo
-17
(+) 17
-23
x = (10x4²)/8 = 20 12
12
23 kN
(+)
(+)
4m
1m 1m
Considerações Sobre os Sinais dos Diagramas:
As fibras inferiores serão tracejadas, definindo portanto a parte à esquerda e à direita da seção. Exemplos:
S1
S3
S2
S3 N
V
S1 M
V M
Exemplos: 01.
P
P
(+)
P
-P
(-) nulo
-Pa
Pa
(-)
(+)
(+)
Pa
P
S
1S
2S
3Pa
Pa
nulo
nulo
P
DEN (kN)
(+)
DMF (kN.m)
DEC (kN)
a a
a
Barra vertical ΣFy = 0 ∴ N = P ΣFx = 0 ∴ V = 0
02.
P/2 P/2
P
DMF (kN.m) DEC (kN)
DEN (kN)
nulo
nulo -P
(-)
(-)
-P
(+)
P/2 P
(+)
P(L/2 + a)
(+)
(+) (+)
P(L/2+a)
P(L/2+a) PL/2
nulo
L/2
2.3.2. Pórticos Simples
80 kN.m
60 kN
40 kN
40 kN
10 kN
50 kN
40
DEN (kN) (+)
DMF (kN.m) DEC (kN) -50
-10
(-)
(-)
nulo (-)
(+)
(+)
-50 10
40
200 (+)
nulo
280 240
240 (+) 6m
4m 4m
Pelo Método Direto:
Obter os diagramas solicitantes para o quadro abaixo:
Reações:
ΣFx = 0 ∴ RAx = 1 tf
ΣFy = 0 ∴ RAy = 3 + 1.4 + 1
RAy = 8 tf
ΣMA = 0 ∴ 3.2 – 1.4.2 – 1.1 + 1.2 + MA = 0 MA = 1 tf.m
Seção S1: trecho DC N = 0;
V = -3 tf MC = -6 tf.m
Seção S2: trecho CE N = 0;
V = 1.x
Para x = 0; V = 0; x = 4; V = 4 tf; M = -1.x2/2
Para x = 0; M = 0;
Seção S3: trecho FB N = -1 tf
V = 1 tf M = -1.x
Para x = 0; M = 0; x = 1; M = -1 tf.m;
Seção S4: trecho BC N = -7 tf
V = 0 M = -2 tf.m
3 tf 1 tf/m
1 tf
1 tf 1 tf.m
B
A
D E
C
F
8 tf
1 tf
2m
2m
Seção S5: trecho AB N = -8 tf
V = -1 tf
M = -1 – 1 . x
Para x = 0; M = -1 tf.m; x = 2; M = -3 tf.m
Diagramas:
DEN (kN)
(-)
DMF (kN.m) DEC (kN)
(-)
(+) -8
-7
nulo
-1
-3
+4
+1
-1 nulo (-)
(-)
-2
(-)
-1 (-) -3
-8 -6
-1 (-) (-)
Reações:
ΣFy = 0 ∴ 1 + 6 – 4.5 + VA + VB = 0 VA + VB = 13
ΣMA = 0 ∴ 1.2,5 – 4.5.2,5 + 6.5 + HB.10 = 0 HB = 1,75 tf
ΣFx = 0 ∴ HB = - HA HA = - 1,75 tf ΣMEDir = 0 ∴ HB.4 - VB.5 = 0
(embaixo) VB = 1,4 tf VA = 11,6 tf
Seção S1: [0 x 2,5] N = + 1,75 tf;
V = 11,6 - 4.x
Para x = 0; V = 11,6; x = 2,5; V = 1,6 tf;
M = 11,6.x - 2.x2 Para x = 0; M = 0;
x = 2,5; M = 16,5 tf.m;
1 tf
VA
HA
4 tf/m
6 tf N
HB
VB
A
B
C D
E
V
S1 S2
S3
S4
x
6m
Seção S2: [2,5 x 5,0]
N = + 1,75 tf; V = 12,6 - 4.x
Para x = 2,5; V = 2,6 tf; x = 5; V = -7,4 tf;
M = 11,6.x +1.(x–2,5) – 2 x2 = 12,6.x - 2.x2 – 2,5 Para x = 2,5; M = 16,5 tf.m;
x = 5; M = 10,5 tf.m;
Seção S4: [0 x 5,0] tgα = 4/5 senα = 4/√41
N + 1,75.cosα + 1,4 senα = 0 N = - 2,24 tf; V + 1,75.senα - 1,4.cosα = 0 V = 0;
M = 1,4.x – 1,75.y M = 0;
Seção S3: [0 x’ 6,0] N = - 7,4 tf;
V = -1,75 tf;
M = 1,75.(x+4) – 1,4.5 = 1,75.x’ Para x’ = 0; M = 0;
x’ = 6; M = 10,5 tf.m;
Nul o
DMF (tf.m)
DEN (tf) DEC (tf)
1 6 ,5 1 7 ,3
1 0 ,5 ( + ) ( + )
( + )
- 7 ,4
Nul o
( - ) 2 ,6 1 ,6 1 1 ,6
- 1 ,7 5 ( - )
1 ,7 5
- 7 ,4
- 2 ,2 4 ( - )
( + )
( - )
Reações:
ΣFx = 0 ∴ HA + HB + 12 – 3,33 = 0 HA + HB = - 8,67 tf ΣFy = 0 ∴ -10 + 4,99 + VA + VB = 0
VA + VB = 5,01 tf
ΣMB = 0 ∴ 6.1 + 10.4 – 12.3 – 9.VA = 0 VA = 1,11 tf VB = 3,9 tf; ΣMEEsq = 0 ∴ - HA.6 + VA.2,5 – 12.3 = 0
HA = -5,54 tf HB = -3,13 tf Determinar os diagramas de esforços solicitantes:
-1,11
DEN (tf)
DMF (tf.m)
DEC (tf)
(-)
(-)
(-)
(-)
-6,5
-10,98
-4,98 Nulo
0,44
(-)
-6,0 1,11
-6,46
5,54
(+)
(+)
(-)
(+)
-2,8
(+)
-2,8
2,8 2,8
4,41 6,0 -1,6 7,66
(-)
(+)
Para a barra inclinada: N = - 5,1.sen 60˚ = - 4,42 kN V = - 5,1 cos 60˚ = - 2,55 kN Momento no apoio engastado: M = – 15,8 kN.m;
Momento na conexão engastada entre barras: M = -15,8 + 5,1. 2 = -5,6 kN.m;
60°
1,9kN 1,9
1,9kN 2 kN/m
1 kN/m
2 kN/m
1 kN/m
5,1kN
15,8kN.m 3,46m
3,8m 1,6m 2m
60°
Nulo
DEN (kN)
(-)
-4,42
DMF
(kN.m)
DEC (kN)
-2,55 -5,1
-1,9 (+)
(-)
(-)
-5,6
-5,6
-15,8 1,8
(-) (-)
2.3.3. Pórtico com Articulação e Tirante
Análise da estaticidade: ge = 2 + 1 – 3 = 0 gi = 3.1 – 1 – 1 - 1 = 0 gh = gi + ge = 0
Substitui-se a barra CD pelo par de esforços N:
Reações e N: ΣFx = 0 ∴ HA = 0; ΣFy = 0 ∴ VA + VB = 8 tf ΣMz = 0 (A) ∴VB.4 – 8.2 = 0 VB = 4 tf.m VA = 4 tf.m
Momento Fletor em F, pela direita:
MFD = 0 ∴ 4 – 2.N = 0
+ N = 2 tf.
4m
H
AV
BV
A4 tf.m
2 tf/m
Tirante ou fio (se for comprimido escora)
F
E
D
C
B
A
2m
2m
H
AV
BN
N
V
A4 tf.m
8 tf
N
4 tf.m
F
2m
Diagramas:
N
ul
o
(-)
-4
4
N
ul
o
-4
N
ul
o
N
ul
o
Nulo
(-) (-)
(-)
-4
-4
DMF (kN.m)
-4
2
Nulo
(-) (+)
(-)
-2
(+)
-4
-4
DEC (kN)
-2
2
(-)
(+)
(-) (-)
DEN (kN)
x = (2 x 4²) / 8 = 4
2.3.4. Pórticos Compostos
Pórticos Compostos são uma associação de pórticos simples. Assim como a viga Gerber é uma associação de vigas simples. Se forem isostáticos, o resultado será uma Associação de Pórticos Simples Isostáticos.
1.
A B J K
H Dx
C D
Dy Dy E
Hx H
H Hy Dx Hx
Hy
I G
F
A B
C
E
D
J K
G F
2.
3.
5.
A D G
30 kN B
10 kN/m
C E
20 kN
F
5m
8m 3m
2m 2m 4m
Decompondo:
ΣFx = 0 ∴ HC = 30 kN; ΣFy = 0 ∴ VA + VC = 80 kN; ΣMA = 0 ∴8.VC + 4.HC –80.4 – 30.2 = 0
VC = 32,5 kN VA = 47,5 kN
ΣFx = 0 ∴ HD + HG +30 = 0
ΣFy = 0 ∴ VD + VG = 20 + 32,5 + 80 VD + VG = 132,5 kN
ΣMD = 0 ∴ 8.VG – 20.5 – 80.4 – 30.4 = 0 VG = 67,5 kN VD = 65 kN MCD = 0 ∴ 4.HD = 0
HD = 0 HG = - 30 kN
A
VA
B
30 kN
10 kN/m
C
Vc Hc
D
VD
G HD
C 30 kN
32,5 kN E
20 kN
Diagramas: ( + ) 6 0 ( + ) 6 0 ( + ) ( - ) 8 0
1 2 0 ( + )
( - ) ( - ) ( - )
1 2 0
n
u
lo
6 0 4 7 ,5
( + ) ( + ) 3 0 n u lo
1 2 0
( + )
( + )
6 0 3 0
8 0
1 8 0 ( + )
DMF (kN.m)
1 8 0 - 3 0
( - ) ( + )
( - )
- 3 2 ,5
( - )
( + ) ( + )
( - ) - 2 0 3 2 ,5
- 6 5
- 4 7 ,5
DEC (kN)
- 6 7 ,5 ( - )
- 3 0
- 4 7 ,5
- 3 0
( - )
( - )
n u lo - 3 2 ,5
( - )
- 4 7 ,5
DEN (kN)
-
6 7 ,2
2.4. Cabos
Cabos são estruturas lineares, extremamente flexíveis, capazes de resistir a esforços de tração. Os esforços cortantes, de compressão, de flexão e de torção não são resistidos por um cabo ideal.
Os cabos são utilizados em vários tipos de estruturas. Nas pontes pênseis e teleféricos são principais elementos portantes, nas linhas de transmissão conduzem a energia elétrica, vencendo vãos entre as torres e são empregados como elemento portante de coberturas de grandes vãos (Süssekind, 1987).
No estudo estático, assume-se a hipótese que os cabos são perfeitamente flexíveis, isto é, possuem momento fletor e esforço cortante nulos ao longo do comprimento. Dessa forma, os cabos ficam submetidos apenas a esforços normais de tração.
As formas assumidas pelo cabo dependem do carregamento que nele atua. Se o carregamento externo for muito maior do que o peso próprio do cabo, este último é desprezado no cálculo. A geometria da configuração deformada do cabo, para um dado carregamento, é denominada forma funicular (do latim, funis = corda) do cabo.
Exemplo de formas funiculares:
Catenária Parábola Polígono Trapezóide Triângulo
Carga Uniformemente Distribuída ao longo do vão
Carga Uniformemente Distribuída ao longo do comprimento do cabo (peso próprio)
A catenária possui uma geometria mais baixa que a parábola. Isto é conseqüência do peso próprio se concentrar mais nas regiões próximas das extremidades.
A partir de estudos comparativos entre a forma da parábola e da catenária, para várias relações de flecha (f) e vão entre extremidades (L), constata-se que para relações (f / L) 0,2 as formas da parábola e da catenária são praticamente coincidentes. Nestes casos, é mais prático usar a forma da parábola para determinação dos lugares geométricos dos pontos ao longo do cabo.
f
L
y
x
2.4.1. Reações de Apoio para Cabos:
Seja um cabo que suporta duas cargas concentradas de valor “P”, dispostas nos terços do vão:
P
P
f
L/3
L/3
L/3
H = Ax
Ay
By
H = Bx
x
y
A
C
D
B
Os sistemas do tipo cabo desenvolvem em suas extremidades empuxos horizontais, exigindo que os vínculos em “A” e “B” sejam do 2o gênero.
Por ser um sistema estrutural plano, as equações de equilíbrio a serem satisfeitas serão:
ΣFx = 0; ΣFy = 0;
ΣMz = 0.
Lembrando que para qualquer ponto ao longo do cabo o momento fletor é nulo devido à sua flexibilidade.
Aplicando as equações de equilíbrio ao cabo ACDB : ΣFx = 0 Ax – Bx = 0, logo Ax = Bx = H (empuxo horizontal); ΣMA = 0 PL / 3 + P (2L / 3) – By.L = 0, portanto By = P; ΣFy = 0 Ay + By = 2P, então Ay = 2P – By = P.
Para o cálculo do empuxo horizontal “H” é necessária uma Quarta equação de equilíbrio que sai da hipótese de momento fletro nulo (M = 0) para qualquer ponto ao longo do cabo. Escolhendo-se o ponto C: