Clínica Universitária de Otorrinolaringologia
Tiroidectomia robótica de acesso remoto
André Resendes Sousa
2
Clínica Universitária de Otorrinolaringologia
Tiroidectomia robótica de acesso remoto
André Resendes Sousa
Orientado por:
Dr. Marco Alveirinho Simão
3
Abstract
In the past, thyroid surgery was associated with a high rate of mortality as well as postoperative complications. Thyroidectomy is now a safe surgery due to the development of surgical and aseptic skills. Nowadays, the use of robotic surgical systems allows the remote access of the thyroid, avoiding visible scars on the neck; also, patients report a higher grade of cosmetic satisfaction and reduced postoperative pain. When operating, this system allows enhanced dexterity, visibility and ergonomics, overcoming some of the difficulties associated with traditional and endoscopic approaches. Robotic approaches have been shown to last longer, without compromising the security and efficiency of the traditional approach, when applied to a meticulously selected group of patients. Apart from hypocalcaemia and brachial plexus neuropraxia, postoperative complications seem to be comparable to the traditional approach. The elevated costs associated with this kind of surgery, longer operative times and a steep learning curve might constitute barriers to its worldwide spread.
Keywords: Thyroidectomy. Robotic surgery. Remote access surgery. Transaxillary approach. Facelift approach
Resumo
No passado, a cirurgia da tiróide era associada a uma elevada taxa de mortalidade e complicações pós-operatórias. O desenvolvimento das técnicas cirúrgicas e de assepsia tornaram esta cirurgia segura. Nos dias de hoje, a tiroidectomia é aliada a sistemas cirúrgicos robóticos que permitem aceder à tiróide remotamente, evitando cicatrizes visíveis no pescoço. Pacientes relatam um maior grau de satisfação cosmética e dor pós-operatória reduzida. Esse sistema permite ao cirurgião operar com maior destreza, visibilidade e ergonomia, ultrapassando algumas das dificuldades associadas às abordagens tradicionais e endoscópicas. As abordagens robóticas mostraram ter um maior tempo operatório, mas não comprometem a segurança e eficácia da abordagem
4
tradicional, quando aplicadas num grupo criteriosamente seleccionado de pacientes. Com excepção da hipocalcemia e da neuropraxia do plexo braquial, as complicações pós-operatórias parecem ser semelhantes. Os elevados custos associados a este tipo de intervenção, tempos operatórios mais longos e uma íngreme curva de aprendizagem podem constituir barreiras à sua ubiquação.
Palavras chave: Tiroidectomia. Cirurgia robótica. Cirurgia de acesso remoto. Abordagem transaxilar. Abordagem facelift.
5
Índice
Abstract ... 3 Índice ... 5 Introdução ... 6 Material e métodos ... 6 Contextualização histórica ... 7 Anatomia da tiróide ... 8Vantagens e limitações da cirurgia robótica ... 10
Selecção do paciente ... 11
Abordagens cirúrgicas ... 12
1. Abordagem transaxilar robótica ... 12
2. Abordagem retroauricular robótica (Facelift) ... 15
Complicações ... 17
Tiroidectomia robótica versus tiroidectomia tradicional ... 18
Conclusão ... 22
Agradecimentos ... 22
6
Introdução
O objectivo deste trabalho é rever bibliografia recente acerca das abordagens robóticas de acesso remoto para cirurgia da glândula tiroideia. Para esse efeito, será feita uma contextualização histórica acerca da tiroidectomia, uma revisão da anatomia da tiróide, uma descrição de algumas das técnicas de tiroidectomia robótica, procurando fazer um levantamento das suas complicações e, ainda, comparar as vantagens e desvantagens em relação à abordagem tradicional. Serão também revistas as principais indicações para a realização deste tipo de procedimentos e ainda as características de um doente considerado ideal para ser submetido a uma abordagem robótica de tiroidectomia.
Material e métodos
Para realizar este trabalho final de mestrado integrado em Medicina, foi efectuada uma pesquisa bibliográfica no motor de busca online PubMed do National
Center for Biotechnology Information. Para direccionar a pesquisa para áreas
específicas que se prendessem com os objectivos deste trabalho, foram definidas as seguintes palavras-chave: robotic thyroidectomy, transaxillary thyroidectomy, facelift
thyroidectomy, retroauricular thyroidectomy, remote-access thyroidectomy. Aos
resultados obtidos foram aplicados filtros para delimitar o acesso a literatura científica elaborada nos últimos 10 anos e escrita em língua inglesa. Os artigos referenciados foram pesquisados entre Novembro de 2017 e Abril de 2018. Contudo, alguns artigos e livros, que não se incluem nos filtros anteriormente mencionados, foram incluídos por constituírem uma importante referência para o tema em questão.
Para poder comparar as abordagens robóticas de tiroidectomia com a tiroidectomia tradicional, foi feita uma pesquisa de meta-análises no mesmo motor de busca online com as expressões robotic thyroidectomy transaxillary, robotic
thyroidectomy retroauricular, robotic thyroidectomy facelift. Os resultados foram
7
Da primeira pesquisa resultaram 4 meta-análises e todas elas foram seleccionadas por incluírem intervenções por abordagem transaxilar robótica. No entanto, à data da realização deste trabalho, não foram encontradas meta-análises que incluíssem pacientes intervencionados pela abordagem robótica retroauricular, dado ser uma técnica mais recente.
Embora existam múltiplas abordagens de tiroidectomia robótica de acesso remoto, serão abordadas as vias transaxilar e retroauricular, uma vez que são as que mais se praticam à data da realização deste trabalho[1].
Contextualização histórica
A cirurgia da glândula tiroideia é historicamente referenciada ainda antes do seu conhecimento anatómico e fisiológico. O primeiro registo válido de uma cirurgia à tiróide remonta ao ano 952 DC, quando Albucasis realiza a primeira tiroidectomia bem sucedida, como tratamento de um bócio.[2] Porém, a descrição anatómica desta glândula só parece ter iniciado em 1511 por Leonardo da Vinci.[3]
Até 1850, a taxa de mortalidade associada à cirurgia da tiróide era muito elevada: cerca de metade dos pacientes submetidos a esse tipo de intervenção morriam, geralmente devido a complicações relacionadas com hemorragia massiva ou infecção.[2] Nessa mesma altura, o grande número de mortes associado às intervenções da tiróide levou a que a Academia Francesa de Medicina tivesse banido a realização de tiroidectomias.[4]
Este cenário verificou-se até que Theodor Kocher revolucionou a tiroidectomia. Aliando-se ao desenvolvimento de técnicas cirúrgicas, anestésicas e antissépticas, Kocher conseguiu diminuir a taxa de mortalidade para menos de 1% até ao ano 1909.[3]
Nesse mesmo ano, é laureado com o prémio Nobel devido aos seu trabalhos sobre a cirurgia à tiróide.
Depois dos esforços para tornar a cirurgia tiroideia mais segura, começaram a desenvolver-se novas técnicas cirúrgicas que permitissem obter melhores resultados estéticos. O início da cirurgia tiroideia minimamente invasiva deu-se, em 1996, quando
8
Garner et al. desenvolvem uma abordagem endoscópica para remoção das glândulas paratiroideias, tendo sido alterada posteriormente para conseguir operar a tiróide.[5]
Até 2002, as técnicas endoscópicas não eram consideradas úteis para o tratamento de doenças malignas da tiróide, no entanto, Miccoli et al. mostram que este tipo de cirurgia é tão efectiva quanto a técnica convencional para o tratamento do carcinoma papilar da tiróide.[5]
A primeira tiroidectomia realizada com o auxílio do sistema cirúrgico da Vinci foi realizada por Chung, em 2007, através de uma via transaxilar.[6] Desde então, foi
demonstrado que o uso desse tipo de sistemas cirúrgicos para tiroidectomias de acesso remoto são seguras e têm resultados oncológicos equivalentes à abordagem tradicional por via aberta, com melhores resultados a nível cosmético, satisfação e qualidade de vida do doente.[7]
A cirurgia da tiróide evoluiu bastante com o passar do tempo. Esse acto cirúrgico, que chegou a ser classificado pelo cirurgião americano Samuel Gross como “uma horrível carnificina” [4], tornou-se nos dias de hoje uma intervenção segura e
eficaz, sendo realizada com incisões progressivamente menores.
Anatomia da tiróide
A glândula tiroideia localiza-se na região anterior e inferior do pescoço, situando-se anteriormente à traqueia. É composta por dois lobos laterais que se unem pelo istmo. Em metade das pessoas, pode emergir superiormente um lobo piramidal a partir do istmo.[8]
Os lobos laterais relacionam-se medialmente com a traqueia e a laringe e lateralmente com a bainha carotídea e o músculo esternocleidomastoideu. Anteriormente, a glândula está coberta pelos músculos infra-hióideus (esternotiroideu, esternohioideu e omohioideu), pela lâmina superficial da fáscia cervical e pelo músculo platisma. A tiróide encontra-se envolvida pelo folheto pré-traqueal da fáscia cervical
9
que, na sua parte posterior, forma o ligamento suspensor da tiróide (ligamento de Berry), fixando a glândula à cartilagem cricoideia e aos dois primeiros anéis traqueais.
A glândula tiroideia é vascularizada principalmente pelas artérias tiroideias superiores (ramos da artéria carótida externa) e inferiores (ramos do tronco tirocervical que, por sua vez, é um efluente da artéria subclávia). Poderá ainda existir a artéria tiroideia ima ou artéria tiroideia inferior de Neubauer.[8] A sua origem é variável, podendo emergir do arco aórtico, artéria subclávia, tronco braquiocefálico, artéria carótida comum ou ainda das artérias torácicas internas. A drenagem venosa da tiróide é feita pelas veias tiroideias superiores, médias e inferiores. As veias tiroideias superiores e médias conduzem o sangue para as veias jugulares internas e as tiroideias inferiores para os troncos braquicefálicos venosos. Os vasos linfáticos são paralelos aos venosos, drenando para os nódulos pré e para-traqueais, pré-laríngeos e supraclaviculares.
Os nervos laríngeos recorrentes inervam os músculos intrínsecos da laringe, à excepção do músculo cricotiroideu, sendo este último inervado pelo nervo laríngeo superior. Estes nervos são assimétricos, uma vez que o nervo laríngeo recorrente direito emerge do nervo vago quando este passa pela artéria subclávia homolateral, enquanto que no lado esquerdo emerge após o arco da aorta. Bilateralmente, os nervos ascendem pelo sulco traqueoesofágico, até atingirem a laringe, relacionando-se com a face posterior dos lobos tiroideus.
O nervo laríngeo recorrente pode ser identificado no triângulo de Simon, limitado pelo esófago medialmente, pela artéria tiroideia inferior superiormente e pela artéria carótida comum lateralmente.[9]
O nervo laríngeo superior é também um ramo do nervo vago. Emerge do gânglio nodoso do nervo vago e dirige-se ântero-inferiormente, cruzando a artéria carótida interna. Junto ao corno superior da cartilagem tiroideia, divide-se num ramo interno que atravessa a membrana tiro-hioideia para inervar sensitivamente a epiglote e o seio piriforme, e num ramo externo que fornece inervação motora aos músculos cricotiroideus e ao músculo constritor inferior da faringe.
10
Vantagens e limitações da cirurgia
robótica
A utilização de sistemas cirúrgicos robóticos traz vantagens não só para o paciente, mas também para o cirurgião.
A ergonomia do cirurgião é melhorada, uma vez que realiza a operação numa consola, onde se encontra sentado. Cirurgiões relatam menor desconforto muscular das costas, ombros e pescoço.[10] Aí, ele consegue controlar os diversos braços do sistema a partir de joysticks que filtram o tremor das mãos do operador[11], conseguindo executar manobras com maior destreza.
O sistema cirúrgico robótico permite uma melhor visibilidade das estruturas anatómicas com a transmissão de imagens em alta definição, a três dimensões, ampliadas e binoculares[12], ao contrário das técnicas endoscópicas que fornecem imagens a duas dimensões. Por não haver necessidade da câmara ser manipulada por um assistente, uma vez que está acoplada ao robô, existe uma maior estabilidade da imagem.
A instrumentação com braços multiarticulados traz um maior grau de liberdade para o cirurgião, tornando mais fácil a sua manipulação em espaços apertados como o pescoço, o que ajuda a dissecção de estruturas delicadas[13], como o nervo laríngeo recorrente e as glândulas paratiroideias.
As técnicas robóticas dispensam insuflação com CO2 para manter uma área de
trabalho, reduzindo assim complicações que se podem tornar graves como hipercápnia, embolias, enfisema subcutâneo e acidose respiratória.[12]
No entanto, o facto de os braços robóticos serem controlados remotamente resulta numa perda de feedback háptico[12], o que pode facilitar a lesão de estruturas adjacentes e a ruptura de material de sutura, caso o cirurgião seja inexperiente.
A tecnologia utilizada implica um elevado investimento monetário, pois o preço do sistema cirúrgico robótico da Vinci ronda os 1.75 milhões de dólares. O preço médio de uma tiroidectomia por abordagem robótica transaxilar é de 15 054 dólares,
11
contrastando com os 9 919 dólares da tiroidectomia por abordagem tradicional.[14] Em Itália, o preço de uma tiroidectomia por abordagem tradicional é cerca de 2 600 euros e a abordagem transaxilar robótica é sensivelmente o dobro.[15] Esses preços parecem justificar-se não só pelo custo do equipamento, mas também devido aos tempos operatórios mais longo.
Há ainda a considerar a elevada barreira que constitui o investimento na formação de cirurgiões capazes de empregar a técnica robótica, quer seja pela realização de workshops ou cursos técnicos, muitas vezes suportado não pelo cirurgião, mas pelo serviço hospitalar.
Sempre que se transita para uma nova tecnologia, há um período de adaptação. Existe uma curva de aprendizagem importante na utilização de sistemas cirúrgicos robóticos, sendo aconselháveis pelo menos 40 a 45 tiroidectomias.[6] Ainda assim, esta curva de aprendizagem é menor do que a aconselhada nas abordagens endoscópicas, que se encontra entre os 55 a 60 pacientes.[10] Um critério apertado na selecção de
pacientes propostos para cirurgia é um ponto essencial para evitar complicações durante a aprendizagem.
Selecção do paciente
O sucesso da tiroidectomia robótica está dependente de uma selecção de pacientes que deve seguir um conjunto rigoroso de critérios. Algumas características podem tornar a cirurgia mais difícil de realizar e predispor a complicações pós-operatórias.
As indicações para a cirurgia robótica são as mesmas da tiroidectomia tradicional.[16] Essencialmente, são seleccionados pacientes com nódulos benignos ou tumores malignos diferenciados, geralmente até T2 na classificação TNM, ou seja, um nódulo com dimensões entre 2 e 4cm, totalmente confinado à tiróide. Doentes com estadios mais avançados (≥ T3) não são considerados candidatos para este tipo de cirurgia.[1]
12
Cirurgias prévias ou tratamentos com radioterapia ao pescoço, tumores tiroideus com invasão extra-cervical ou metastização, bócios substernais ou retrofaríngeos, doença de Graves e tiroidite são algumas das contra-indicações a abordagens robóticas de tiroidectomia.[17] Embora as dimensões sejam variáveis na literatura, estão também descritos alguns limites superiores de diâmetro de nódulos (3cm[17]-5cm[1]) e volume de tiróide (30mL[17]-40mL[1]).
A abordagem transaxilar tem algumas contra-indicações específicas como distância entre o bordo externo do músculo grande peitoral e a incisura jugular ≥ 18cm,
patologia da coifa dos rotadores e da articulação do ombro e índice de massa corporal ≥ 30 kg/m2.[18],[19]
Em resumo, o paciente ideal para se submeter a uma tiroidectomia robótica deve ser alguém que pretenda evitar cicatrizes expostas no pescoço ou que tenha história de cicatrização hipertrófica ou de queloides. Adicionalmente, será jovem, não obeso, sem comorbilidades e preferencialmente com necessidade apenas de lobectomia unilateral, com nódulo tiroideu inferior a 3cm de diâmetro ou volume total tiroideu inferior a 40 mL.[1]
Abordagens cirúrgicas
1. Abordagem transaxilar robótica
Esta abordagem foi descrita pela primeira vez, em 2000, por Ikeda et al., sendo realizada por via endoscópica e com recurso a insuflação de CO2.[20] Mais tarde, em
2007, Chung et al. modificam a técnica, permitindo a sua utilização com o sistema cirúrgico da Vinci, sem a necessidade de insuflação.[11]
13
a) Posição do doente
O procedimento é realizado com recurso a anestesia geral. O doente é posicionado em decúbito dorsal, com uma almofada sob as omoplatas, permitindo a extensão do pescoço. O braço é abduzido e estendido de forma a expor a axila e diminuir a distância entre esta e o pescoço. O membro deve ser mobilizado de forma natural, não aplicando demasiada força adicional, para evitar lesões do plexo braquial.
b) Criação da loca de acesso
Depois de o doente estar correctamente posicionado, marca-se uma linha guia para a incisão com cerca de 5 a 6 centímetros ao longo do bordo lateral do músculo grande peitoral. O braço pode ser mobilizado para confirmar que a incisão não será visível com o membro em abdução, garantindo assim um melhor resultado estético.[6] A
área da loca de acesso corresponde a um trapézio limitado pela linha da incisão, uma linha horizontal que passa pela incisura jugular, pelo plano sagital médio e por uma linha oblíqua que passa pela membrana tiro-hioideia e forma um ângulo de 60 graus com o plano sagital médio (figura 1).
Fixa-se o braço na posição inicial e faz-se uma incisão na axila de acordo com a linha guia. Cauterizando electricamente sobre a superfície anterior do músculo grande peitoral, cria-se uma loca de acesso subplatismal desde a axila até à região contida entre as porções esternal e clavicular do músculo esternocleidomastoideu. A porção esternal do músculo esternocleidomastoideu e os músculos infra-hioideus são retraídos anteriormente com um afastador de Chung, mantendo assim a glândula tiroideia exposta.
c) Ancoragem do robô
Depois de criado um espaço de trabalho, o robô da Vinci é ancorado à mesa operatória do lado contralateral à incisão e são inseridos na loca de acesso 4 braços:
Maryland dissector, endoscópio com câmara a 30 graus, ProGrasp fórceps e o Harmonic shears, dispostos numa orientação céfalo-caudal. É importante que se
Figura 1 - Posição do doente e área da loca de acesso [6]
14
mantenha a maior distância possível entre os braços do robô para evitar colisões entre eles.
d) Tiroidectomia
Uma vez introduzidos todos os braços do robô, o cirurgião dirige-se à consola. A dissecção da tiróide é feita à semelhança de uma tiroidectomia por abordagem tradicional.[21]
Este processo inicia-se seccionando os vasos tiroideus médios do lobo da tiróide que se pretende extrair. De seguida, o pólo superior desse lobo deve ser traccionado ínfero-medialmente, para que seja possível seccionar os vasos tiroideus superiores, tendo o cuidado de não lesar o ramo externo do nervo laríngeo superior. A dissecção do lobo é realizada, separando-o dos músculos cricofaríngeo e cricotiroideu, até que seja possível identificar as glândulas paratiroideias, que serão dissecadas do lobo e preservadas. Próximo do pólo inferior do lobo tiroideu, será possível identificar o nervo laríngeo recorrente que, à semelhança das glândulas paratiroideias, também será dissecado do lobo. A parte inferior do lobo é separada do ligamento suspensor da tiróide e, consequentemente, da traqueia. É realizada uma incisão no istmo, tornando a peça operatória livre para ser colocada dentro de um endobag e extraída através da incisão axilar. No final, deverá ser feita uma cuidada revisão da hemostase, para evitar complicações como hemorragias ou hematomas do pescoço, e suturada a incisão com a colocação de um dreno.[1, 22]
Se o objectivo da intervenção for a tiroidectomia total, o lobo contralateral deverá ser ressecado a partir da mesma incisão.
Vantagens e desvantagens desta abordagem
Esta abordagem permite atingir um excelente resultado estético, uma vez que a cicatriz se situa na axila, ficando ocultada pelo braço. Como não se realiza uma incisão no pescoço, não se desenvolvem fibrose dos músculos nem hipostesia nessa mesma área. Não é necessário fazer insuflação com CO2, evitando algumas das suas
complicações supra-referidas. Finalmente, obtém-se acesso directo à glândula tiroideia do lado ipsilateral, sendo possível operar o lobo contralateral. [11],[16]
15
Figura 2 - Linha de incisão [23]
No entanto, esta técnica é mais invasiva do que a abordagem tradicional, obrigando à criação de uma grande loca de acesso com extensa área de dissecção, o que faz prolongar o tempo operatório. O posicionamento do doente pode levar a lesões do plexo braquial por extensão prolongada do membro superior. E ainda, a remoção do lobo contralateral, a partir de uma única incisão lateral, torna-se mais difícil e exige uma maior experiência, quando comparado com a abordagem tradicional. [11],[16]
2. Abordagem retroauricular robótica (Facelift)
Esta abordagem de tiroidectomia foi descrita pela primeira vez pelo otorrinolaringologista David J. Terris e a sua equipa, num artigo publicado em 2011, onde demonstram a viabilidade do método facelift de acesso remoto.
Técnica cirúrgica (Terris et al.)[23] a) Posição do doente
O paciente é colocado em decúbito dorsal, com a cabeça rodada a 30 graus contralateralmente ao lado da abordagem, para que o sulco auricular posterior seja exposto. Esta abordagem é realizada com anestesia geral, podendo intubar-se o doente com um tubo laríngeo EMG, permitindo assim a monitorização do nervo laríngeo recorrente.
b) Criação da loca de acesso
A linha capilar occipital é rapada para garantir que parte da cicatriz resultante da incisão não fique visível.[1] É feita uma incisão no sulco retroauricular e continuada ao longo da linha capilar occipital (figura 2). É criada uma loca de acesso superficialmente ao nervo auricular magno e veia jugular externa, e, profundamente, ao
músculo platisma. Essa loca de acesso é extendida inferior e ventralmente ao músculo esternocleidomastoideu até se atingir a clavícula. O triângulo definido pelo músculo omohioideu, esternocleidomastoideu e esternohioideu é identificado e o músculo
16
omohiodeu retraído ventralmente. Os músculos esternohioideu e esternotiroideu são afastados anteriormente e medialmente expondo a glândula tiroideia. Um afastador (modificação do afastador de Chung) é introduzido para retrair os músculos infra-hioideus, mantendo uma área de trabalho.
c) Ancoragem do robô
Depois de estabelecido uma área de trabalho, o robô da Vinci é ancorado. São colocados três braços na loca de acesso, através da incisão: câmara de 30 graus,
Maryland grasper e um Harmonic CS14C device.
d) Tiroidectomia
Tal como a abordagem transaxilar, a retroauricular utiliza o mesmo método de dissecção da tiróide da tiroidectomia tradicional, já descrita anteriormente. [17]
Vantagens e desvantagens desta abordagem
Esta técnica tem como vantagem necessitar de uma menor dissecção dado que a distância entre a incisão e a tiróide é menor do que na abordagem transaxilar e, assim, teoricamente, a dor sentida pelo doente no período pós-operatório será menor e com uma recuperação mais rápida. Esta cirurgia pode ser realizada em pacientes com maior índice de massa corporal, pois é mais fácil manter a elevação do flap cutâneo, alargando assim o grupo de pacientes que pode ser intervencionado. O posicionamento do paciente desta abordagem evita a lesão do plexo braquial, associada ao posicionamento do paciente na abordagem transaxilar.[6],[23]
Adicionalmente, não existe necessidade de colocação de drenos e a intervenção pode ser feita em regime de cirurgia de ambulatório. Também não é necessário fazer insuflação com CO2, evitando algumas das suas complicações associadas.[23]
No entanto, há possibilidade de a dissecção lesar o nervo auricular magno, levando ao aparecimento de hipostesia na sua área de inervação, que geralmente será apenas temporária.[6] O acesso ao lobo tiroideu contralateral é limitado.[16]
17
Complicações
Hipocalcemia
A hipocalcemia acontece devido ao hipoparatiroidismo. A causa mais comum de hipoparatiroidismo é o dano cirúrgico das glândulas paratiróides[24], pelo que se torna de
extrema importância identificar correctamente essas glândulas a fim de evitar lesões que possam predispor a esta complicação. Quando é temporária (duração inferior a 6 meses), ocorre até cerca de 50% das intervenções, enquanto que a permanente (duração superior a 6 meses) ocorre entre 0.5 a 2%.[1]
Se a hipocalcemia for ligeira poderá ser assintomática; no entanto, em casos graves, pode mesmo ser fatal. A sua sintomatologia inclui parestesias nos dedos e região perioral, convulsões, alterações electrocardiográficas como prolongamento do intervalo QT, espasmo carpopedal, broncospasmo e laringospasmo. Poderá verificar-se a presença dos sinais de Chvostek (espasmo dos músculos periorais após percussão do nervo facial) e Trousseau (espasmo do carpo após insuflação do esfigmomanómetro no braço acima da pressão arterial sistólica).[24]
O seu tratamento é realizado com suplementação oral de cálcio, sendo a sua dosagem ajustada aos níveis séricos desse ião. Se os seus níveis não normalizarem com 2 gramas de cálcio oral, poderá ser adicionado desde 0.25 até 1 µg de calcitriol. Quando se verificam sintomas de hipocalcemia grave ou esta é refratária ao tratamento oral, a suplementação intravenosa está indicada.
Lesão do nervo laríngeo recorrente
A lesão destes nervos pode ocorrer de forma transitória até 8% dos casos e de forma permanente (duração superior a 12 meses) de 0.3 a 3%.[1] Esta complicação resulta em paralisia das cordas vocais, que se pode traduzir em rouquidão, disfagia e aspiração. Nas tiroidectomias totais, é possível lesar-se os nervos laríngeos recorrentes bilateralmente, o que se pode manifestar por obstrução da via aérea, dispneia e estridor. Nesses casos, poderá ser necessário intervir urgentemente com traqueostomia por comprometimento da via aérea.
18
Em alguns centros cirúrgicos, é preferida a intubação endotraqueal do doente aliada a um monitor que permite detectar a integridade do nervo laríngeo recorrente.[25] Esta prática não parece reduzir o risco de lesão mas pode ter valor prognóstico. [26]
Hematoma do pescoço
Ocorre aproximadamente em 1% das intervenções.[1] Esta complicação pode ser fatal por levar a um compromisso da via aérea ou mesmo asfixia, por isso, quando identificada, poderá ser necessário levar o paciente de novo para o bloco operatório para resolvê-la. A sua prevenção faz-se com uma adequada hemostase durante a cirurgia.
Neuropraxia do plexo braquial
O posicionamento do paciente na abordagem transaxilar, com o membro superior em extensão, pode predispor a lesões do plexo braquial. Os membros devem ser mobilizados de forma natural, não aplicando demasiada força adicional, a fim de evitar este tipo de lesões. Os pacientes podem apresentar-se com diminuição dos reflexos e alterações motoras ou sensitivas dos membros superiores. Esta complicação pode ser confirmada com um electromiograma. A maioria dos casos resolve espontaneamente, no entanto, pode ser necessário terapia física de reabilitação ou mesmo intervenção cirúrgica nos casos mais graves. [1]
Lesão do nervo auricular magno
Esta complicação ocorre na abordagem retroauricular, uma vez que esse nervo se encontra nas áreas necessárias a dissecar. Os pacientes podem desenvolver hipostesia na sua área de inervação, que geralmente será apenas temporária.[6]
Tiroidectomia robótica versus
tiroidectomia tradicional
Pretende-se com esta comparação avaliar se existem diferenças entre a tiroidectomia tradicional e tiroidectomia robótica no seu geral, independentemente da abordagem. Como tal, o facto das meta-análises não incluírem doentes abordados pela
19
cirurgia retroauricular não inviabiliza esta comparação. Contudo, algumas das diferenças apresentadas a seguir podem não se aplicar à abordagem retroauricular.
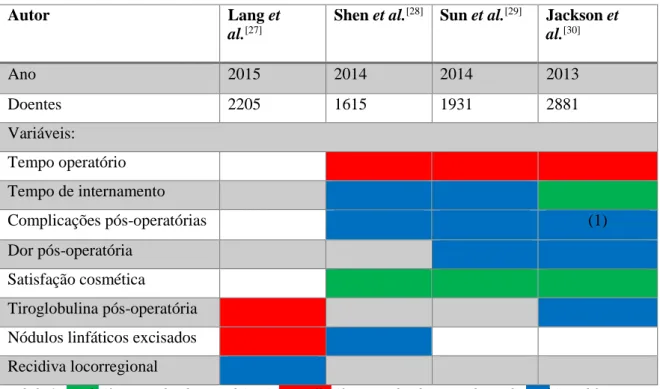
Na tabela 1, são mostrados os resultados das variáveis estudadas nas diferentes meta-análises.
Autor Lang et
al.[27]
Shen et al.[28] Sun et al.[29] Jackson et
al.[30] Ano 2015 2014 2014 2013 Doentes 2205 1615 1931 2881 Variáveis: Tempo operatório Tempo de internamento Complicações pós-operatórias (1) Dor pós-operatória Satisfação cosmética Tiroglobulina pós-operatória Nódulos linfáticos excisados Recidiva locorregional
Tabela 1 - Verde (favorece abordagem robótica); Vermelho (favorece abordagem tradicional); Azul (sem diferença estatisticamente significativa); (1) Excepto hipocalcemia, sendo mais prevalente nas abordagens robóticas.
Comparando a abordagem de tiroidectomia tradicional com as robóticas, todas as meta-análises aqui seleccionadas demonstram uma diferença estatisticamente significativa entre os tempos operatórios, sendo que a utilização de assistência robótica implica uma maior duração da cirurgia. A média desse incremento de tempo foi entre 42.05 [30] - 76.7 [29] minutos. Este aumento da duração da cirurgia pode ser explicado, em parte, pela necessidade de criação de uma extensa loca de acesso e à preparação do robô antes de o cirurgião se dirigir à consola e iniciar a dissecção da tiróide.
Quanto à duração do internamento, os pacientes submetidos a tiroidectomias robóticas tiveram um tempo de internamento equivalente à abordagem tradicional, nos trabalhos de Shen et al. e Sun et al.. Na meta-análise de Jackson et al., o tempo médio
20
de internamento foi considerado significativamente menor do que na abordagem tradicional.
As principais complicações pós-operatórias estudadas nestas meta-análises foram as seguintes: hipocalcemia, paralisia do nervo laríngeo recorrente, hematoma, seroma e extravasamento linfático. Todas as meta-análises analisaram um grupo de complicações idêntico. Shen et al. e Sun et al. consideram que não há diferenças estatisticamente significativas na ocorrência de complicações pós-operatórias entre as duas abordagens. Os achados de Jackson et al. são concordantes com os autores anteriores, apenas com a excepção da hipocalcemia temporária, que parece ser mais prevalente nos pacientes do grupo da cirurgia robótica.
Sun et al. e Jackson et al. relatam não haver diferenças estatisticamente significativas no que diz respeito a dor pós-operatória entre as duas abordagens. Avaliando a dor pela necessidade de medicação analgésica no período pós-cirúrgico, não se encontraram diferenças na quantidade de medicação requisitada pelos pacientes de ambos os grupos. [29, 30]
Uma vez que a principal razão para a escolha de uma abordagem robótica é um melhor resultado estético, evitando cicatrizes visíveis, torna-se de extrema importância avaliar o grau de satisfação cosmética do doente após a cirurgia. Todas as meta-análises analisaram a variável satisfação cosmética, chegando à mesma conclusão de que existe uma diferença estatisticamente significativa que é favorável ao grupo de pacientes submetidos a abordagens robóticas. Estes relatam uma maior satisfação a nível dos resultados estéticos.
Sun et al. descrevem como um estudo incluído na sua meta-análise avaliou a satisfação estética dos doentes. Três meses após a realização da cirurgia, foi pedido aos doentes para classificarem os resultados estéticos, aplicando uma escala com 5 classificações possíveis: extremamente satisfeito, satisfeito, aceitável, insatisfeito e extremamente insatisfeito. Os resultados desse questionário mostraram que 58.5% dos pacientes submetidos a abordagens robóticas estavam extremamente satisfeitos contrastando com os 11.6% do grupo da tiroidectomia tradicional. Nenhum dos pacientes do grupo da tiroidectomia robótica considerou estar insatisfeito ou extremamente insatisfeito, ao contrário do grupo da tiroidectomia tradicional em que 18.6% respondeu estar insatisfeito e 2.3% extremamente insatisfeito.[29]
21
O artigo de Lang et al. procurou avaliar os resultados oncológicos e perceber se existem diferenças entre a tiroidectomia robótica e a tiroidectomia tradicional. Para isso, avaliaram variáveis como os níveis séricos de tiroglobulina pós-cirúrgicos, número de nódulos linfáticos excisado e recidiva locorregional.
Os níveis de tiroglobulina pós-cirúrgicos foram mais elevados no grupo de doentes operado pela abordagem robótica, o que sugere que há uma maior quantidade de tecido tiróideu que não é removido, já que a remoção do lobo contralateral, através de uma única incisão, é mais difícil. O estudo de Jackson et al. contrasta com este achado pois os níveis de tiroglobulina pós-cirúrgicos foram considerados semelhantes em ambos os grupos de doentes.
O número de gânglios linfáticos excisados foi menor nos doentes operados com abordagens robóticas. Apesar desta diferença ser estatisticamente significativa, representa, em média, apenas 1 gânglio. Mais uma vez, este achado é contrastado pelo estudo de Shen et al., dado que não foram encontradas diferenças estatisticamente significativas em relação ao número de gânglio linfáticos excisados.
Os autores, no entanto, consideram que estas diferenças encontradas nos níveis de tiroglobulina pós-cirúrgicos e no número de nódulos linfáticos excisados são pouco prováveis de alterar o resultado oncológico, uma vez que os doentes sujeitos a abordagens robóticas geralmente têm tumores de menores dimensões e em estadios mais precoces e, portanto, o tecido tiróideu remanescente não irá comprometer o prognóstico destes doentes que, em si, já é excelente.[27] Isto é suportado pelo facto de, após um seguimento de cerca de um ano e meio, não haver diferenças significativas entre os dois grupos no que diz respeito à recidiva dos tumores.
Em suma, as meta-análises aqui referenciadas parecem mostrar que a tiroidectomia robótica, quando comparada com a tiroidectomia tradicional, é uma alternativa segura e eficaz. Ambas as abordagens são equivalentes em termos de tempo de internamento e complicações pós-operatórias (com excepção de hipocalcemia que é mais prevalente na abordagem robótica). A abordagem robótica tem maior duração operatória, no entanto os doentes submetidos a esse tipo de abordagem relatam uma maior satisfação cosmética. Os resultados oncológicos parecem ser semelhantes entre as abordagens. Apesar de haver diferenças nos níveis de tiroglobulina pós-cirúrgicos e no número de nódulos linfáticos excisados, numa das meta-análises, não parece que isso
22
altere os resultados oncológicos, desde que sejam cumpridos os critérios de selecção de doentes para cirurgia robótica. Como tal, são necessários mais estudos para perceber se, de facto, existe equivalência de resultados oncológicos entre as abordagens.
Conclusão
As abordagens de tiroidectomia robótica parecem ser uma alternativa segura e eficaz, quando aplicadas num grupo criteriosamente seleccionado de pacientes. A utilização de sistemas cirúrgicos robóticos permite o acesso remoto da tiróide, evitando cicatrizes visíveis, o que se traduz num maior grau de satisfação cosmética dos doentes operados. Também permite maior destreza, visibilidade e ergonomia durante a operação, ultrapassando algumas das dificuldades associadas às abordagens tradicionais e endoscópicas. Este tipo de abordagens parece ser equivalente à tiroidectomia tradicional a nível de complicações, com excepção da hipocalcemia, lesões do plexo braquial e no nervo auricular magno. São necessários mais estudos para compreender melhor se os resultados oncológicos são mesmo semelhantes à abordagem tradicional.
Agradecimentos
Gostaria de agradecer, em primeiro lugar, à minha família e à Rita pelo precioso apoio que sempre me proporcionaram.
Não posso deixar de agradecer, também, ao Professor Óscar Dias, ao Dr. Marco Alveirinho Simão e a todos os restantes membros da Clínica Universitária de Otorrinolaringologia pela disponibilidade, apoio e pela oportunidade de realizar este trabalho final de mestrado.
23
Bibliografia
1. Bhatia, P., Mohamed, H.E., Kadi, A., Kandil, E. and Walvekar, R.R. (2015) Remote access thyroid surgery. Gland Surgery, 4, 376–387.
2. Norton, J.A. (2001) Surgery Basic Science and Clinical Evidence. Springer, Berlin, pp. 849–850.
3. Giddings, A.E. (1998) The history of thyroidectomy. Journal of the Royal Society of
Medicine, 91 Suppl 3, 3–6.
http://www.pubmedcentral.nih.gov/articlerender.fcgi?artid=1296290&tool=pmcent rez&rendertype=abstract.
4. Sakorafas, G.H. (2010) Historical evolution of thyroid surgery: From the ancient times to the dawn of the 21st century. World Journal of Surgery, 34, 1793–1804. 5. Sarkar, S., Banerjee, S., Sarkar, R. and Sikder, B. (2016) A Review on the History of
‘Thyroid Surgery’. Indian Journal of Surgery, 78, 32–36.
6. Hae, E., Chang, E., Kim, H.Y., Koh, Y.W. and Chung, W.Y. (2017) Overview of robotic thyroidectomy. Gland Surgery, 2017: 10.21037/gs.2017.03.18.
7. Clark, J.H., Kim, H.Y. and Richmon, J.D. (2015) Transoral robotic thyroid surgery.
Gland surgery, 4, 429–34.
http://www.pubmedcentral.nih.gov/articlerender.fcgi?artid=4561656&tool=pmcent rez&rendertype=abstract.
8. Fancy, T., Gallagher, D. and Hornig, J.D. (2010) Surgical anatomy of the thyroid and parathyroid glands. Otolaryngologic Clinics of North America, 43, 221–227. http://dx.doi.org/10.1016/j.otc.2010.01.001.
9. Mohebati, A. and Shaha, A.R. (2012) Anatomy of thyroid and parathyroid glands and neurovascular relations. Clinical Anatomy, 25, 19–31.
10. Lee, J. and Chung, W.Y. (2012) Current status of robotic thyroidectomy and neck dissection using a gasless transaxillary approach. Current Opinion in Oncology, 2012: 10.1097/CCO.0b013e32834cb813.
11. Kang, S.W., Jeong, J.J., Nam, K.H., Chang, H.S., Chung, W.Y. and Park, C.S. (2009) Robot-Assisted Endoscopic Thyroidectomy for Thyroid Malignancies Using a Gasless Transaxillary Approach. Journal of the American College of
Surgeons, 209, e1–e7. http://dx.doi.org/10.1016/j.jamcollsurg.2009.05.003.
12. Aïdan, P. and Bechara, M. (2017) Gasless trans-axillary robotic thyroidectomy: the introduction and principle. Gland Surgery, 6, 229–235.
http://gs.amegroups.com/article/view/14672/15494.
13. Taskin, H.E., Arslan, N.C., Aliyev, S. and Berber, E. (2013) Robotic endocrine surgery: State of the art. World Journal of Surgery, 37, 2731–2739.
24
(2012) Robotic and endoscopic transaxillary thyroidectomies may be cost prohibitive when compared to standard cervical thyroidectomy: A cost analysis.
Surgery (United States), 152, 1016–1024.
http://dx.doi.org/10.1016/j.surg.2012.08.029.
15. Materazzi, G., Fregoli, L., Papini, P., Bakkar, S., Vasquez, M.C. and Miccoli, P. (2018) Robot-Assisted Transaxillary Thyroidectomy (RATT): A Series Appraisal of More than 250 Cases from Europe. World Journal of Surgery, 42, 1018–1023. http://link.springer.com/10.1007/s00268-017-4213-2.
16. Berber, E., Bernet, V., Fahey, T.J., Kebebew, E., Shaha, A., Stack, B.C., et al. (2016) American Thyroid Association Statement on Remote-Access Thyroid Surgery. Thyroid, 26, 331–337.
http://online.liebertpub.com/doi/10.1089/thy.2015.0407.
17. Mohamed, S.E., Noureldine, S.I. and Kandil, E. (2014) Alternate incision-site thyroidectomy. Current Opinion in Oncology, 26, 22–30.
18. Abramovici, L., Cartier, C., Pierre, G. and Garrel, R. (2015) Robot-assisted transaxillary thyroidectomy: Surgical technique. European Annals of
Otorhinolaryngology, Head and Neck Diseases, 132, 153–156.
http://dx.doi.org/10.1016/j.anorl.2015.04.002.
19. Landry, C.S., Kwon, D.S., Grubbs, E.G., Morris, S.G., Lee, J.E. and Perrier, N.D. (2011) Operative technique for single incision robot-assisted transaxillary thyroid surgery. World Journal of Endocrine Surgery, 3, 83–88.
20. Ikeda Y, Takami H, Sasaki Y, Kan S, N.M. (2000) Endoscopic resection of thyroid tumors by the axillary approach. J Cardiovasc Surg, 41, 791–2.
21. Kang, S.W., Lee, S.C., Lee, S.H., Lee, K.Y., Jeong, J.J., Lee, Y.S., et al. (2009) Robotic thyroid surgery using a gasless, transaxillary approach and the da Vinci S system: The operative outcomes of 338 consecutive patients. Surgery, 146, 1048– 1055. http://dx.doi.org/10.1016/j.surg.2009.09.007.
22. Somashekhar, S.P. and Ashwin, K.R. (2017) Robot-assisted thyroidectomy using a gasless, transaxillary approach for the management of thyroid lesions: Indian experience. Journal of Minimal Access Surgery, 13, 280–285.
http://www.ncbi.nlm.nih.gov/pmc/articles/PMC5607795/.
23. Terris, D.J., Singer, M.C. and Seybt, M.W. (2011) Robotic facelift thyroidectomy: II. Clinical feasibility and safety. Laryngoscope, 121, 1636–1641.
24. Kasper, D., Fauci, A., Hauser, S., Longo, D., Jameson, J.L. and Loscalzo, J. (2015) Harrison’s Principles of Internal Medicine. 19th editi., McGraw-Hill Education, New York.
25. Russell, J.O., Noureldine, S.I., Al Khadem, M.G. and Tufano, R.P. (2016) Minimally invasive and remote-access thyroid surgery in the era of the 2015 American Thyroid Association guidelines. Laryngoscope investigative
otolaryngology, 1, 175–179.
http://www.ncbi.nlm.nih.gov/pubmed/28894814%0Ahttp://www.pubmedcentral.ni h.gov/articlerender.fcgi?artid=PMC5510273.
25
26. Gremillion, G., Fatakia, A., Dornelles, A. and Amedee, R.G. (2012) Intraoperative recurrent laryngeal nerve monitoring in thyroid surgery: is it worth the cost? The
Ochsner journal, 12, 363–6.
http://www.pubmedcentral.nih.gov/articlerender.fcgi?artid=3527866&tool=pmcent rez&rendertype=abstract.
27. Lang, B.H.H., Wong, C.K.H., Tsang, J.S., Wong, K.P. and Wan, K.Y. (2015) A systematic review and meta-analysis evaluating completeness and outcomes of robotic thyroidectomy. Laryngoscope, 125, 509–518.
28. Shen, H., Shan, C. and Qiu, M. (2014) Systematic review and meta-analysis of transaxillary robotic thyroidectomy versus open thyroidectomy. Surgical
Laparoscopy, Endoscopy and Percutaneous Techniques, 24, 199–206.
29. Sun, G.H., Peress, L. and Pynnonen, M.A. (2014) Systematic review and meta-analysis of robotic vs conventional thyroidectomy approaches for thyroid disease.
Otolaryngology - Head and Neck Surgery (United States), 150, 520–532.
30. Jackson, N.R., Yao, L., Tufano, R.P. and Kandil, E.H. (2014) Safety of robotic thyroidectomy approaches: Meta-analysis and systematic review. Head and Neck, 2014.
![Figura 1 - Posição do doente e área da loca de acesso [6]](https://thumb-eu.123doks.com/thumbv2/123dok_br/15625861.1055530/13.892.504.763.123.436/figura-posição-do-doente-área-da-loca-acesso.webp)
![Figura 2 - Linha de incisão [23]](https://thumb-eu.123doks.com/thumbv2/123dok_br/15625861.1055530/15.892.478.756.856.1041/figura-linha-de-incisão.webp)