Desenvolvimento de Dispositivo Automatizado para Tratamento Superficial em
Amostras de Titânio com Hidroxiapatita
Development of an Automated Device for Surface Treatment in Titanium
Samples with Hydroxyapatite
DOI:10.34117/bjdv6n4-352
Recebimento dos originais: 10/03/2020 Aceitação para publicação: 27/04/2020
Eduardo Costa Estambasse
Doutorando em Engenharia Mecânica, pela Instituição Universidade Estadual Paulista - UNESP Instituição: Universidade Estadual Paulista - UNESP
Endereço: Av. Eng° Luiz Edmundo Carrijo Coube, 14-01, Bairro Vargem Limpa – Bauru, São Paulo, CEP: 17033-360
E-mail: eduardoestambasse@yahoo.com.br
Cesar Renato Foschini
Pós-Doutor em Ciência e Engenharia de Materiais pelo Massachusetts Institute of Technology, MIT, Estados Unidos.
Instituição: Universidade Estadual Paulista - UNESP
Endereço: Av. Eng° Luiz Edmundo Carrijo Coube, 14-01, Bairro Vargem Limpa – Bauru, São Paulo, CEP: 17033-360
E-mail: cesar.foschini@unesp.br
RESUMO
Este trabalho apresenta o desenvolvimento de um dispositivo eletromecânico comandado por um sistema com controle de velocidade, rotação e avanço em dois motores destinados a movimentação da amostra e da tocha utilizada para o recobrimento de titânio com HA (hidroxiapatita). O objetivo é controlar a rotação do corpo de prova a ser recoberto bem como do avanço do bico de aspersão térmica. Para isto, foi desenvolvido um sistema de acionamento eletrônico dos motores (atuadores do sistema); o processamento digital dos sinais utilizando um processador digital de sinais; e o embarque da estratégia de controle por software no computador. O controle da velocidade de deposição e o avanço foi monitorado e pode ser utilizado como parâmetros para a melhoria qualidade e eficiência da deposição de HA nas amostras de titânio com boa reprodutibilidade.
Palavras-chave: aspersão térmica, dispositivo, titânio, hidroxiapatita. ABSTRACT
This paper presents the development of a mechanical device controlled by a rotational speed control system and two motors for advancing the moving torch and the sample used for the titanium coating with HA (hydroxyapatite). The objective is to control the rotation of the sample to be coated and the advance of the thermal spray nozzle. For this, it was developed an electronic drive system for motors (system actuators); digital signal processing, using a digital signal processor; and embark the control strategy on the computer. The control of the deposition speed and the advance was monitored and can be used as parameters for the quality and efficiency of the HA deposit, thus allowing greater variations in the application process.
1INTRODUÇÃO
A ciência dos materiais é uma das maiores áreas de pesquisas e oferece grandes oportunidades de estudo devido as infinitas possibilidades de produção e aplicação de biomateriais a qual pesquisadores tem à sua disposição. O campo dos biomateriais é estudado em conjunto ou estruturado de maneira que as propriedades mecânicas e superficiais sejam identificadas objetivando uma determinada aplicação. Para (SCHOEN et al., 2013) num conceito simplificado, biomateriais são materiais que podem ser utilizados no corpo humano e na fabricação de dispositivos para substituir tecidos vivos cuja parte ou função foi perdida, tendo como função avaliar, tratar, aumentar ou substituir órgãos ou tecidos.
A motivação deste estudo está no desenvolvimento de um dispositivo que possa permitir o controle de velocidade e avanço na deposição da HA utilizando um sistema microcontrolado em amostras fabricadas a partir de uma liga de titânio que posteriormente será ensaiado pelo método dinâmico para identificação do módulo G (elasticidade).
A Figura 1 apresenta o conceito que foi usado para elaborar o projeto de um dispositivo para recobrir o substrato, por um método de aspersão térmica com um controle preciso de velocidade e avanço da amostra submetida ao ensaio.
Figura 1: Necessidade versus benefícios com o desenvolvimento de um dispositivo para tratamento de amostras
Fonte: Autor (2019)
2 BIOMATERIAIS
Biomateriais, bioengenharia, engenharia biomédica, biotecnologia, biomecânica, engenharia de tecidos e medicina regenerativa são áreas do conhecimento relativamente novas, cuja definição nem sempre é clara, sendo praticamente impossível evitar a superposição entre elas. Por ordem de abrangência teríamos: biotecnologia (definida como uso de organismos vivos, suas células ou moléculas para a produção racionalizada de substâncias, gerando produtos comercializáveis),
bioengenharia (aplicação dos princípios de engenharia ao estudo de processos biológicos, desenvolvimento de componentes, equipamentos e processos para prevenção, diagnóstico e tratamento de doenças; reabilitação e promoção da saúde) (RUSSELL, 2007). Por definição os biomateriais são todos os materiais utilizados para substituir em partes ou todo um sistema biológico segundo (MIRTCHI; LEMAITRE; TERAO, 1989), dessa maneira. pode-se ter biomateriais metálicos, cerâmicos, poliméricos, minerais entre outros (HYUN et al., 2017).
Todos os biomateriais têm a necessidade de satisfazer diversos critérios, tais como resistência adequada, resistência a corrosão, bioadesão, biofuncionalidade, biocompatibilidade, resistência ao desgaste e baixo atrito. No entanto, os diversos biomateriais que foram desenvolvidos até agora nem sempre satisfazem todos estes requisitos, o que exige melhorias e aperfeiçoamentos constantes.
O desgaste e a corrosão são os principais motivos de falhas em componentes de implantes (DOROZHKIN, 2010). Algumas das aplicações da tribologia no campo biomédico são as seguintes: desgaste de próteses, válvulas cardíacas, placas e parafusos no reparo de fraturas ósseas (WU; ARSECULARATNE; HOFFMAN, 2017). O desgaste é um fator importante no controle e desempenho clínico a longo prazo de um biomaterial metálico (FURKO et al., 2018)
2.1 PROPRIEDADES DESEJADAS EM BIOMATERIAIS Um biomaterial deve atender aos seguintes critérios:
a) Propriedades mecânicas: a proteção contra o “stress”, ou seja a tensão pode ser evitada combinando-se o módulo de elasticidade (G) do biomaterial com o dos ossos que podem variar de 4 a 30 GPa (HUSSEIN; MOHAMMED; AL-AQEELI, 2015) , além disso o material deve ter um G baixo, mas deve possuir alta resistência para suportar as cargas impostas e prevenir o afrouxamento do sistema de fixação evitando assim a necessidade de reparação. b) Biocompatibilidade: o material desenvolvido deve ser compatível com os sistemas vivos e
não deve causar nenhum dano físico (HOSSAIN; ROY; GUIN, 2017).
c) Maior resistência ao desgaste: o material deve ter resistência ao desgaste e apresentar baixo atrito ao entrar em contato com os tecidos do corpo. Na resistência ao desgaste, o implante pode se soltar (SHAH; THOMSEN; PALMQUIST, 2018). Além disso, os detritos de desgaste gerados pode causar inflamação que é prejudicial para o tecido que suporta o implante. d) Osseointegração: foi inicialmente definida como “uma estrutura com conexão direta e
funcional entre o osso vivo e a superfície de um implante” que possa suportar uma determinada carga (CHEN et al., 2016).
2.2 HIDROXIAPATITA
A apatita é um nome geral para compostos com a estrutura basicamente hexagonal, pertencente ao grupo P63/m e representada geralmente pela fórmula M10(ZO4)6X2, onde:
M: Ca2+, Sr2+, Pb2+, Cd2+, Mg2+, Fe2+, Na+, K+ ZO: PO43-, AsO43-, VO42-, SiO4
4-X: F−, Cl−, OH−, Br−, O2−
Nas aplicações tecnológicas, a HA é utilizada no preenchimento de cavidades, em forma de grãos densos ou porosos, bem como no revestimento de implantes metálicos, esses geralmente feitos de titânio. Nesse último caso, procura-se melhorar as características dos implantes, combinando-se a resistência mecânica do metal à atividade biológica do material cerâmico.
Quando se deseja reparar uma fratura óssea, depara-se com duas situações, a primeira é somente substituir a parte fraturada, a segunda diz respeito a regeneração do osso por meio de uma substituição com interação. Para (POKHREL, 2018) é necessário utilizar um campo da ciência muito importante, onde a HA preparada pode fazer o recobrimento de um biomaterial, neste caso o titânio, tendo excelente biocompatibilidade com os tecidos vivos, combinado com propriedades mecânicas (resistência a tração, compressão, deformação e torção), tais propriedades mecânicas tem apresentado melhoras significativas com a combinação porosidade do substrato e técnicas de recobrimento.
3 PROCESSADOR DE SINAIS DIGITAL
Sistemas de controle de rotações multivariáveis, em particular sistemas com eixos de rotações acoplados a motores, vem sendo estudados nos últimos anos, visto a grande quantidade de aplicações industriais em que eles se encaixam. Trabalhos que apresentam sistemas mecânicos vem sendo propostos utilizando diferentes estratégias de desenvolvimento dos controladores.
3.1 MICROCONTROLADOR ATMEGA 328
Por possuírem facilidade de utilização e tamanho reduzido os microcontroladores são amplamente utilizados em uma vasta gama de aplicações. Sua arquitetura varia de acordo com os diferentes tipos de microcontroladores e fabricantes, podem alterar frequência do clock, processamento, entradas e saídas digitais, entre outras.
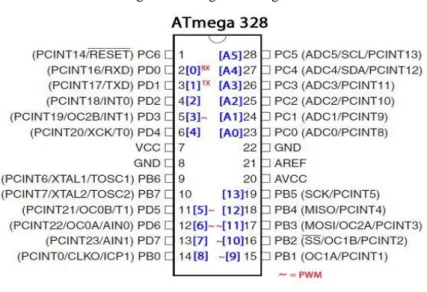
Segundo (ATMEL 2017), o Atmega328 é um microcontrolador de 8 bits baseado em RISC AVR que combina memória flash 32Kb ISP com capacidade de leitura e escrita, 1Kb EEPROM, SRAM 2 KB, 23 entradas e saídas de uso geral, 32 registradores de uso geral, três temporizadores, interrupções internas e externas, USART serial programável, porta serial SPI, 6 canais de conversor
A/D 10 bits, timer programável com oscilador interno, a Figura 2 apresenta a pinagem do microcontrolador. O dispositivo opera entre 1,8 e 5,5 volts.
Figura 2: Pinagem Atmega 328
Fonte: Atmega (2019)
3.2 CIRCUITO INTEGRADO L293D
O L298D, é um circuito integrado monolítico composto por uma ponte H completa designado para acionamento de relés, solenoides e motores de passo e corrente contínua. Possui duas entradas de interrupção que servem para ligar ou desligar o dispositivo independente dos sinais de entrada.
4 ASPERSÃO TÉRMICA
Aspersão térmica é um grupo de processos onde materiais metálicos ou não-metálicos, finamente divididos, são depositados em condição fundida ou semifundida sobre um substrato preparado, formando um depósito aspergido (LIMA, 2004). Os depósitos são de sucessivas camadas de pequenas partículas que se sobrepõe achatando-se e aderindo-se à superfície, resfriam-se e se solidificam formando assim o revestimento.
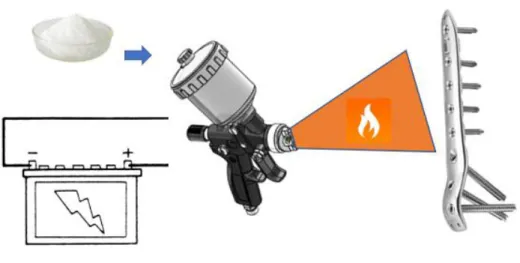
O objetivo pelo qual se aplica a aspersão térmica em um material é a proteção que esse tipo de processo proporciona ao substrato que o recebe, podendo ser proteção contra corrosão, contra o desgaste abrasivo, erosivo, e fadiga superficial (PYLYPCHUK, 2015). Os revestimentos podem também ser usados para isolamento térmico e elétrico, um dos aspectos mais relevantes da utilização dessa técnica é a diversidade de aplicação, já que a seleção de materiais é praticamente ilimitada. A Figura 3 traz o esquema do processo de aspersão térmica empregado neste trabalho.
Figura 3: Esquema de aplicação do processo de aspersão térmica
Fonte: Autor (2019)
O equipamento utilizado para o recobrimento das amostras utiliza uma chama de combustão para fundir o material e formar um revestimento na superfície do substrato adicionando uma cobertura de alta qualidade e desempenho. O material em forma de pó é alimentado na tocha de aspersão, em seguida é soprado pelo jato de oxigênio e pulverizado sobre o substrato.
Neste trabalho, desenvolveu-se um dispositivo de deposição de filmes de Hidroxiapatita sobre amostras de Titânio. Para isso controlou-se a velocidade de deposição e o avanço da tocha através do acionamento eletrônico dos motores e do processamento digital dos sinais utilizando um processador digital de sinais, que serão detalhados a seguir.
5 MATERIAIS E MÉTODOS
O dispositivo utilizado neste trabalho é formado por dois motores CC, os quais são responsáveis pelo sistema de movimentação e está esquematizado na Figura 4. O motor A está conectado ao eixo árvore por uma correia plana e polias, este confere uma rotação que varia de 0 a 700 rotações por minuto. O motor B é responsável pelo avanço da amostra em relação a tocha de aspersão, o avanço é feito por meio de um fuso roscado trapezoidal com diâmetro de 8 mm, com quatro entradas de rosca que permitem um avanço de 2mm por rotação, ambos motores são acionados pelo CI L289D que por sua vez é comandado pelo microprocessador Atmega328.
O microprocessador dá liberdade de controle a rotação do motor A que é um dispositivo elétrico de corrente contínua, e que por meio de um potenciômetro faz o acionamento do motor, neste mesmo sistema o motor B é acionado também por outro potenciômetro o que garante um ajuste fino de regulagem da velocidade, tanto de giro da amostra quanto de movimentação frente a tocha de aspersão.
Figura 4: Projeto do dispositivo para tratamento das amostras
Fonte: Autor (2019)
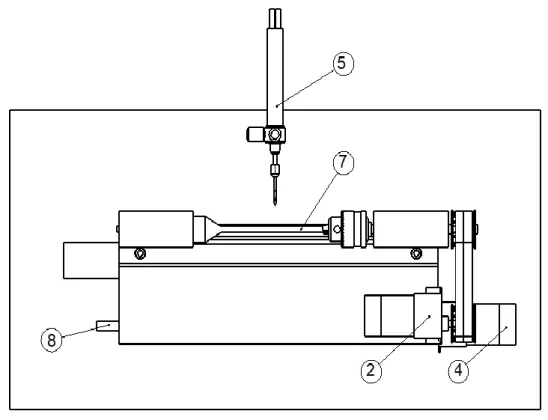
A amostra é fixada por um mandril de três castanhas de capacidade 3/8” fixado manualmente a cada amostra. A outra extremidade da amostra é fixada por um contraponto rotativo, travada por meio de parafusos. A Figura 5 traz a vista superior do dispositivo, com o posicionamento da tocha de aspersão térmica.
Figura 5: Projeto do dispositivo para tratamento das amostras
As amostras possuem diâmetros de 5 mm e comprimento de 200 mm, diante disso o dispositivo foi projetado de maneira a comportar amostras de até no máximo 220 mm de comprimento e 3/8” de diâmetro.
O dispositivo foi projetado de maneira que a tocha fique fixa e quem faz o avanço é o carro que suporta a amostra conforme pode ser visto nas Figuras 4 e 5.
Foi inserido no projeto a automação do avanço das amostras, o dispositivo está equipado com dois fins de curso, a Figura 6 apresenta os componentes eletrônicos utilizados para automação do sistema mecânico.
Figura 6: Componentes eletrônicos utilizados no projeto do dispositivo
Fonte: Autor (2019)
Ao iniciar o processo de revestimento da amostra o fim de curso é liberado, o microcontrolador recebe o sinal e aguarda o fim de curso de reverso, automatizando assim o sistema que retorna para a posição inicial completando o processo de revestimento. Este processo pode ser alterado tanto em velocidade de rotação, de avanço, quanto de posicionamento e distância da tocha de aspersão.
5.1 MOVIMENTAÇÃO DAS AMOSTRAS
Após a fixação da amostra no dispositivo realiza-se o acionamento do motor A definindo velocidade de rotação. Inseriu-se também um botão on/off para partida do motor, bem como a interrupção da corrente elétrica ocorrendo assim o desligamento do motor.
Do ponto de vista do acionamento eletrônico, utilizou-se um braço inversor chaveado. Com isso, controlando a velocidade de rotação do motor B, controla-se a velocidade de rotação do fuso trapezoidal. O motor B, quando acionado, realiza o giro do fuso trapezoidal acoplado ao dispositivo de fixação realizando a movimentação da amostra, combinando a rotação e o avanço e, expondo a amostra no momento da aspersão, recobrindo a amostra com HA.
Também foi projetado no dispositivo de tratamento de amostras um sistema para automatizar o avanço. Uma chave fim de curso foi colocada dando liberdade para tratar amostras com diferentes comprimentos. Ao chegar no limite estabelecido, a chave tem a função de emitir um sinal para o microcontrolador que, através da lógica, pode inverter o avanço, retornando à posição inicial em que outra chave fim de curso é acionada e informa ao microcontrolador que finaliza o tratamento, desligando os motores e reiniciando o sistema.
5.2 DEPOSIÇÃO DE HA
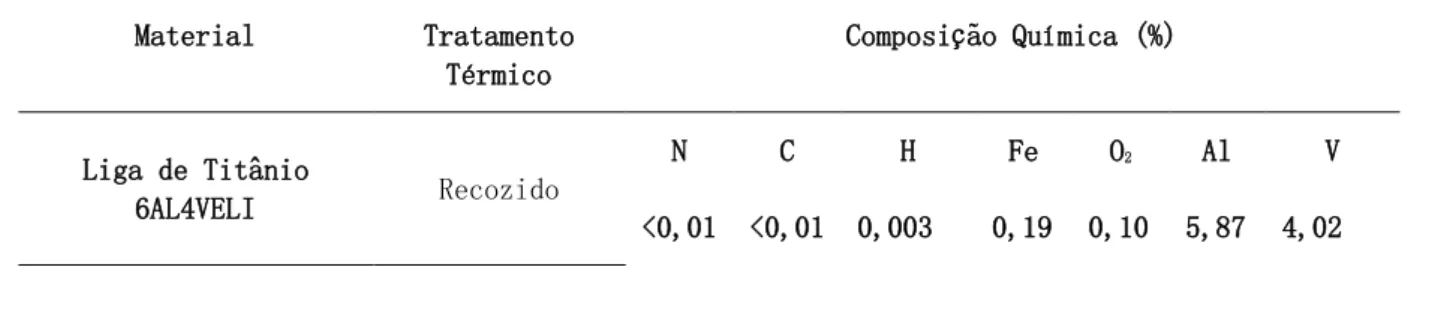
As amostras de Liga de Titânio 6AL4VELI ASTM F136 conhecido comercialmente como titânio puro de grau 6 foram avaliadas em quatro fases distintas:
1. A liga de titânio foi cortada em bastões com comprimento de 50 mm, nesta fase os bastões não sofreram alterações superficiais, foram analisadas as suas superfícies com microscopia confocal, MEV e DRX.
2. Os bastões foram submetidos a um tratamento superficial abrasivo de jateamento com microesferas de vidro, o tratamento teve como objetivo aumentar a superfície de contato, criando poros, que foram também analisados utilizando as técnicas descritas na fase 1. 3. Utilizando o dispositivo para tratamento das amostras, foi depositado sobre os corpos de
prova, que não passaram por um tratamento de jateamento, uma camada de hidroxiapatita, pelo método de aspersão térmica.
4. Nesta última fase, fixando-se os parâmetros de velocidade e rotação estabelecidos na fase 3, foi feita a aspersão térmica de hidroxiapatita sobre os corpos de prova, que foram submetidos ao tratamento de jateamento anteriormente à aspersão térmica. Novamente as amostras foram analisadas utilizando as mesmas técnicas das três fases anteriores.
Todas as amostras foram cortadas por um processo de torneamento em bastões de 50 mm de comprimento, possibilitando assim a caracterização mecânica e superficial dos corpos de prova. A Tabela 1 fornece dados do material aplicado nos experimentos.
Tabela 1: Dados da composição química das amostras.
Material Tratamento
Térmico
Composição Química (%)
ASTM F136
Propriedades Mecânicas
Alongamento (%) Escoamento Tração
22,5 885 MPa 983 MPa
Fonte: Adaptada de (“Folha de dados do material ASM”, [s.d.])
Durante os estudos foram analisados diferentes tipos de velocidades de avanço, com características diferentes. Para a análise das amostras foram utilizadas 100 rpm no eixo árvore e velocidade de avanço de 10 m/min para o recobrimento. As amostras foram analisadas e posteriormente a camada de HA depositada por aspersão térmica foi seccionada em dimensões menores para determinação de suas propriedades mecânicas, tais como do módulo de elasticidade e, caracterizadas superficialmente por microscopia eletrônica de varredura e microscopia confocal. Além da caracterização superficial as amostras foram submetidas a ensaio não destrutivo através do método dinâmico para determinar o módulo de elasticidade (G) por meio da frequência de vibração do material. Os resultados estão sendo analisados e serão apresentados posteriormente.
6 CONCLUSÕES
De acordo com os resultados obtidos e as análises realizadas durante os experimentos, as seguintes conclusões podem ser retiradas deste trabalho. O projeto e construção do dispositivo atendem de maneira satisfatória o tratamento das amostras com HA. A versatilidade e a facilidade com que se pode variar as características do tratamento contribuíram para a economia de tempo e material depositado, bem como na qualidade e reprodutibilidade das amostras. O revestimento sobre o substrato da liga de titânio “refratário” teve uma boa aderência. O dispositivo de tratamento de amostras pode ainda ser utilizado para o seccionamento das amostras com pequenas modificações que serão discutidas em trabalhos posteriores. Pode-se também utilizar o dispositivo para tratamento de outros tipos de amostras, de diversos materiais, com geometrias diferentes, bem como a deposição de diferentes materiais, para aplicações diversas.
Conclui-se desta maneira que o dispositivo é eficiente, versátil, de baixo custo, podendo ser aplicado para outros tipos de experimentos.
REFERÊNCIAS
BAUER, T. W. et al. Uncemented acetabular components: Histologic analysis of retrieved hydroxyapatite-coated and porous implants. The Journal of Arthroplasty, v. 8, n. 2, p. 167–177, 1 abr. 1993.
CHEN, X. et al. Advanced biomaterials and their potential applications in the treatment of periodontal disease. Critical Reviews In Biotechnology, v. 36, n. 4, p. 760–775, ago. 2016.
DOROZHKIN, S. V. Calcium Orthophosphates as Bioceramics: State of the Art. Journal of
Functional Biomaterials, v. 1, n. 1, p. 22–107, 30 nov. 2010.
FURKO, M. et al. Development and characterization of multi-element doped hydroxyapatite bioceramic coatings on metallic implants for orthopedic applications. Boletín de la Sociedad
Española de Cerámica y Vidrio, v. 57, n. 2, p. 55–65, 1 mar. 2018.
HOSSAIN, A.; ROY, S.; GUIN, P. S. The Importance of Advance Biomaterials in Modern Technology: A Review. Asian Journal of Research in Chemistry, v. 10, n. 4, p. 441–453, 7 ago. 2017.
HUSSEIN, M. A.; MOHAMMED, A. S.; AL-AQEELI, N. Wear Characteristics of Metallic Biomaterials: A Review. Materials (1996-1944), v. 8, n. 5, p. 2749–2768, maio 2015.
HYUN, D. W. et al. Characterization of biomaterial-free cell sheets cultured from human oral mucosal epithelial cells. Journal Of Tissue Engineering And Regenerative Medicine, v. 11, n. 3, p. 743–750, mar. 2017.
IBRAHIM, D. 3 - PIC microcontroller project development. In: IBRAHIM, D. (Ed.). . Pic Basic
Projects. Oxford: Newnes, 2006. p. 49–79.
LIMA, P. M. Caracterização de revestimentos de hidroxiapatita depositados por aspersão térmica a plasma sobre a liga Ti-13Nb-13Zr para aplicação em implantes dentários. 2004.
MIRTCHI, A. A.; LEMAITRE, J.; TERAO, N. Calcium phosphate cements: study of the β-tricalcium phosphate — monocalcium phosphate system. Biomaterials, v. 10, n. 7, p. 475–480, 1 set. 1989. POKHREL, S. Hydroxyapatite: Preparation, Properties and Its Biomedical Applications. Advances in Chemical Engineering and Science, v. 8, n. 4, p. 225–240, 13 set. 2018.
Ti-6Al-SCHOEN, F. J. et al. Biomaterials Science : An Introduction to Materials in Medicine. Burlington: Academic Press, 2013. v. 3rd ed
SHAH, F. A.; THOMSEN, P.; PALMQUIST, A. A Review of the Impact of Implant Biomaterials on Osteocytes. Journal Of Dental Research, v. 97, n. 9, p. 977–986, ago. 2018.
RUSSELL, T. An Historical Perspective of the Development of Plate and Screw Fixation and Minimally Invasive Fracture Surgery With a Unified Biological Approach. Techniques in Orthopaedics, v. 22, n. 3, p. 186–190, 1 set. 2007.
WU, Y.-Q.; ARSECULARATNE, J. A.; HOFFMAN, M. Attrition-corrosion of human dental enamel: A review. Biosurface and Biotribology, SI: Understanding and application of dental biotribology. v. 3, n. 4, p. 196–210, 1 dez. 2017.