Universidade de Lisboa
Faculdade de Ciências
Departamento de Engenharia Geográfica, Geofísica e Energia
Aplicação dos mínimos quadrados inteiros na interferometria SAR.
Estudo de caso em Singapura.
André Luís Alves Quintela de Oliveira
Trabalho de Projecto
Mestrado em Engenharia Geográfica
Universidade de Lisboa
Faculdade de Ciências
Departamento de Engenharia Geográfica, Geofísica e Energia
Aplicação dos mínimos quadrados inteiros na interferometria SAR.
Estudo de caso em Singapura.
André Luís Alves Quintela de Oliveira
Trabalho de Projecto
Mestrado em Engenharia Geográfica
Orientador: Prof. Dr. João Catalão Fernandes
iii
Resumo
A tecnologia SAR, em combinação com a interferometria, é uma ferramenta de baixo custo que permite a monitorização da deformação da superfície a grande escala e a criação de modelos digitais de elevação. A técnica é chamada de Interferometric Synthetic Aperture Radar (InSAR), e permite estimar o movimento diferencial a partir de um conjunto interferogramas, criados a partir do cálculo de diferença de fase entre pixéis homólogos de duas imagens SAR. Os interferogramas são posteriormente processados, com o objectivo de seleccionar os pontos que apresentem uma grande estabilidade no valor de fase ao longo do tempo, denominados Persistent Scatterers (PS), que permitem realizar medições com precisão milimétrica.
O objectivo deste trabalho consiste na aplicação do algoritmo STUN do autor Kampes [2006] que oferece uma metodologia alternativa à técnica de referência dos Persistent Scatterer proposta por Ferretti et al., [2001], onde a fase desenrolada é determinada com recurso aos mínimos quadrados inteiros e no qual as observações podem assumir precisões diferentes.
Para o estudo deste método utilizou-se como área de estudo a ilha de Singapura. O modelo digital do terreno utilizado foi o SingDTM, e utilizou-se um total de 21 interferogramas, com uma série temporal de imagens SAR do satélite ERS1 adquiridas entre 1995 e 2000, computados através do software Doris.
Foi utilizado um algoritmo para demonstrar o processo de cálculo dos mínimos quadrados inteiros na estimação do erro do DEM e do deslocamento em pontos PS, utilizando observações de fase enroladas. Este algoritmo utiliza rotinas existentes no algoritmo STUN de Kampes [2006].
iv
Abstract
The SAR technology in combination with interferometry, is a low-cost tool which allows the monitorization of the surface deformation and the creation of large scale digital terrain models. The technique is called Interferometric Synthetic Aperture Radar (InSAR), and allows to estimate the differential motion from a set of interferograms, created by calculating the phase difference between two pixéis counterparts SAR images. The interferograms are then processed, using a software, and points are selected which have a high stability over a long period of time, called Persistent Scatterers (PS) that enable measurements with millimeter precision.
The aim of this work is the application of the algorithm STUN from Kampes [2006], an alternative approach to the technical reference of the Persistent Scatterer proposed by Ferretti et al., [2001], where the unwrapped phase is determined using the least squares integers and where the observations may have different uncertainties.
To study this method was used as area of study the island of Singapore. The digital terrain model used was SingDTM, and a total of 21 interferograms were used with a time series of satellite ERS1 SAR images acquired between 1995 and 2000, computed through Doris software.
An algorithm was used to demonstrate the calculate process of the integer least squares in the estimation of the DEM error and displacement at PS points with wrapped phase observations. This algorithm uses routines that exist in Kampes STUN algorithm [2006].
v
Agradecimentos
Em primeiro lugar gostaria de agradecer ao Prof. Doutor João Catalão, não só pela orientação científica fornecida ao longo do trabalho, mas também pelo apoio e constantes sugestões face aos problemas que iam surgindo.
Aos professores do Curso de Engenharia Geográfica que me passaram o seu conhecimento durante o meu percurso académico.
vi
Índice
1 Introdução ... 1 1.1 Introdução ... 1 1.2 Estado de Arte ... 2 1.3 Objectivo do trabalho ... 4 1.4 Organização do trabalho ... 42 Persistent Scatterers na Interferometria SAR ... 6
2.1 Interferometria SAR ... 6
2.2 Limitações da técnica InSAR ... 8
2.3 A técnica Persistent Scatterers ... 10
3 Estimador do valor inteiro pelos mínimos quadrados ... 16
3.1 Introdução ... 16
3.2 O Método LAMBDA ... 16
3.3 Solução fixa ... 18
3.4 Aplicação do Método LAMBDA na interferometria radar ... 19
4 O algoritmo STUN ... 22
4.1 Desenrolamento tri-dimensional da fase... 22
4.2 Modelo Funcional ... 24
4.3 Modelo Estocástico ... 26
4.4 Estimativa da componente da variância ... 28
4.5 Cálculo da rede de referência ... 29
4.6 Estimação dos pontos relativamente à rede de referência ... 32
4.7 Estimativa final ... 32
5 Análises e resultados do estudo de caso em Singapura ... 35
5.1 Singapura ... 35
5.2 Descrição dos dados ... 35
5.3 Processamento Interferométrico dos dados multi-temporais SAR ... 37
5.4 Processamento de referência ... 38
5.5 Integração da rede ... 45
5.6 Estimação de pontos em relação à rede de referência ... 52
vii
7 Referências Bibliográficas ... 57
Índice de figuras
Figura 1 – Geometria de aquisição Radar ... 7Figura 2 – Esquema da medição da deformação do solo pela técnica InSAR ... 7
Figura 3 – Interferograma InSAR, valor da fase em radianos ... 8
Figura 4 – Comparação entre o índice de dispersão e o desvio padrão da fase... 13
Figura 5 – Esquema do algoritmo STUN ... 23
Figura 6 – Rede que demonstra as ligações mínimas necessárias para resolver o problema de desenrolamento de fase ... 24
Figura 7 – Rede com conexões redundantes que pode ser utilizada para detectar pontos incoerentes e estimações incorrectas entre pontos ... 24
Figura 8 – Geometria da posição de um scaterrer de um sub-pixel em azimute e distância ao solo ... 26
Figura 9 – Cálculo da rede de referência ... 29
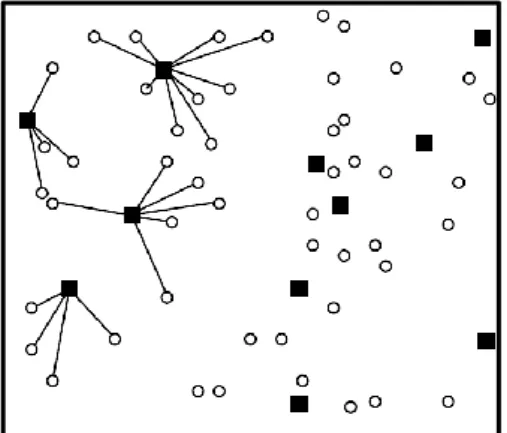
Figura 10 – Conexão de novos pontos (círculos) aos pontos da rede de referência (quadrados) ... 32
Figura 11 – Modelo Digital do Terreno de Singapura ... 37
Figura 12 – Distribuição da base perpendicular para Singapura ... 38
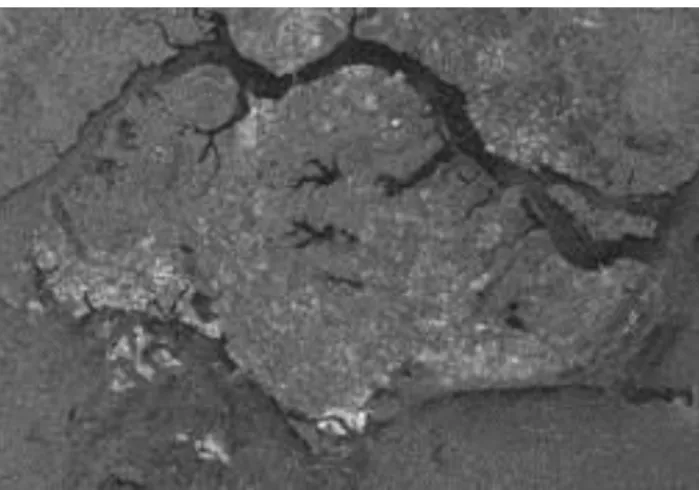
Figura 13 – Amplitude para a Ilha de Singapura ... 39
Figura 14 – Lista de Persistent Scatterer Candidates inicial (em cima) e final (em baixo) ... 39
Figura 15 – Pontos da rede de referência ... 40
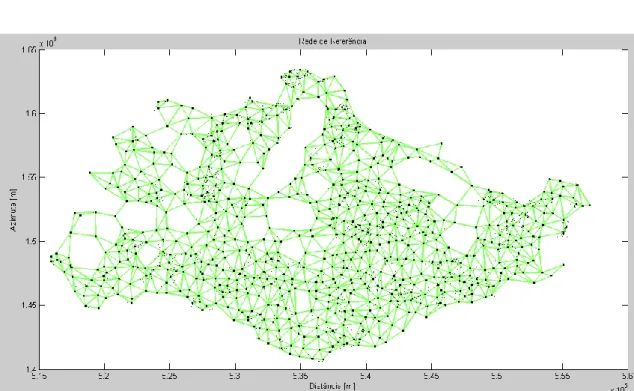
Figura 16 – Rede de referência ... 41
Figura 17 – Arcos usados no VCE ... 42
Figura 18 – Conjunto de PSC obtidos após eliminação; amostra de pontos "óptima" usada para o estudo ... 46
Figura 19 – Rede de exemplo para construção da matriz C ... 47
Figura 20 – Distribuição dos resíduos ajustados para o erro do DEM [m] ... 48
Figura 21 – Distribuição dos resíduos ajustados para o deslocamento [mm/ano]... 49
Figura 22 – Resíduos ajustados nos arcos da rede de referência para o erro do DEM ... 49
Figura 23 – Resíduos ajustados nos arcos da rede de referência para o deslocamento .. 50
Figura 24 – Erro do DEM nos pontos que compõem a rede de referência... 51
Figura 25 – Deslocamento nos pontos que compõem a rede de referência ... 51
Figura 26 – Comparação entre os valores de fase de um ponto que origina arcos com resíduos baixos (a azul) e um ponto que origina arcos com resíduos elevados (a vermelho) ... 52
viii
Figura 27 – Erro do DEM nos pontos após a estimação de novos pontos em relação à rede de referência... 53 Figura 28 – Deslocamento nos pontos após a estimação de novos pontos em relação à rede de referência... 54 Figura 29 – Valor da variância a posteriori nos pontos após a estimação final ... 54
Índice de tabelas
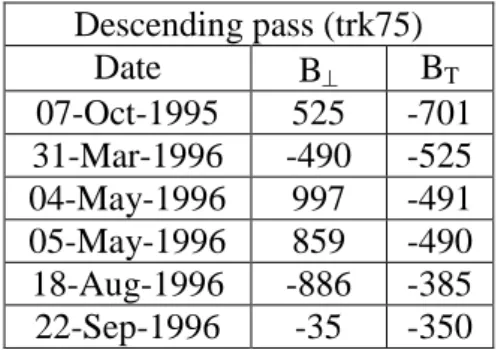
Tabela 1 – Base perpendicular e temporal do ERS1 ... 35 Tabela 2 – Informação estatística da rede de referência ... 41 Tabela 3 – Informação estatística dos arcos utilizados para o Variance Component Estimation ... 41 Tabela 4 – Amostra de valores de diferenças duplas de fase nos arcos ... 44 Tabela 5 – Estatística dos resíduos ajustados obtidos nos arcos da rede de referência para o erro do DEM e deslocamento ... 48 Tabela 6 – Estatística da estimação erro do DEM e do deslocamento nos pontos da rede de referência ... 50 Tabela 7 – Estatística da estimação final para erro do DEM e do deslocamento ... 53
ix
Abreviaturas
APS Atmosfheric Phase Screen
DEM Digital Elevation Model
DORIS Delft Object-Oriented Radar Interferometric Software
DTM Digital Terrain Model
ERS European Remote Sensing Satellite
ESA European Space Agency
GPS Global Positioning System
ILS Integer Least-Square
InSAR Interferometric Synthetic Aperture Radar
LAMBDA Least-squares AMBiguity Decorrelation Adjustment
PS Persistent Scatterer
PSC Persistent Scatterer Candidate
SAR Synthetic Aperture Radar
SRTM Shuttle Radar Topography Mission
STUN Spatial Temporal Unwrapping Network
x
Lista de Símbolos
{ } Dados Enrolados Coerência complexa
Ângulo incidente local Base perpendicular local
Índice de dispersão da amplitude
Frequência local do centro de Doppler
Fase na imagem SAR
Fase interferométrica enrolada Fase interferométrica desenrolada ̂ Factor variância a posteriori
Variância da fase atmosférica
Matriz para o modelo de equações de observação dos parâmetros inteiros ̅ Matriz reduzida ̅
Matriz para o modelo de equações de observação de fase Matriz que descreve a rede espacial
Matriz de projecção ortogonal dos Mínimos-Quadrados Matriz Co-factor da componente de variância do modelo Transformação-Z para a descorrelação de ambiguidades Vector de ambiguidades desconhecidas inteiras
̂ Solução flutuante para as ambiguidades ̌ Solução inteira para as ambiguidades Vector dos parâmetros desconhecidos
̂ Vector dos parâmetros desconhecidos ajustados
̌ Vector dos parâmetros desconhecidos ajustados utilizando ̌ Vector de medição de ruído
̂ Vector de resíduos ajustados ̌ Vector de resíduos desenrolados
̂ Matriz variância-covariância a posteriori dos resíduos dos mínimos quadrados ̂ Matriz variância-covariância a posteriori dos parâmetros estimados
Matriz variância-covariância a priori das observações
̂ Matriz variância-covariância a posteriori das observações ajustadas
Vector de observações
̂ Vector de observações ajustadas
̌ Vector de observações ajustadas utilizando ̌
̂ Solução flutuante para a transformação-Z dos parâmetros desconhecidos ̌ Solução inteira para a transformação-Z dos parâmetros desconhecidos
1
1 Introdução
1.1 Introdução
A interferometria radar de abertura sintética (InSAR, Interferometric Synthetic Aperture Radar) envolve a utilização de duas ou mais imagens SAR da mesma área para calcular a topografia e deformação da superfície. Um sistema SAR consiste num satélite que possui a bordo um sensor activo, que pode trabalhar tanto durante o dia como à noite sob todas as condições meteorológicas, e que emite ondas electromagnéticas na banda das microondas com comprimentos de onda entre os 3 cm (banda X) e os 21 cm (banda L).
Contudo, esta técnica está fortemente sujeita a efeitos de descorrelação temporal e geométrica, e heterogeneidades atmosféricas que degradam a precisão das medições. Com o surgimento da técnica dos Persistent Scatterers (PS) na interferometria SAR, Ferretti et al., [2001], foi possível reduzir os principais erros da interferometria diferencial, representando nos dias de hoje um processo quase universal de mapeamento da deformação da superfície da Terra. Esta técnica tem a potencialidade de em determinadas condições (elevado número de imagens SAR) mitigar os efeitos atmosféricos presentes nas imagens SAR e utiliza o inconfundível scatterer de determinados alvos terrestres para melhorar a precisão da medição da deformação para valores na ordem dos milímetros.
Em síntese, o objectivo do processamento PS-InSAR é conseguir separar as diferentes contribuições (deformação da superfície, atraso da atmosfera, erro do DEM, erro da órbita e a descorrelação do ruído) tendo em conta a distribuição espaço-temporal e a correlação entre as amostras dos pontos PS. Após a remoção destes erros é então possível calcular o histórico das deformações com precisão milimétrica.
A técnica dos PS InSAR tem sido aplicada com sucesso em variadas situações, entre as elas as mais usadas têm sido na medição da subsidência da superfície terrestre, na medição da velocidade de movimentos de vertente ou na medição das deformações vulcânicas.
A técnica de referência dos Persistent Scatterer proposta por Ferretti et al. [2001] usa uma função coerência para calcular a velocidade e o erro do DTM na posição dos persistente scatterers. Em particular, a técnica proposta faz uma pesquisa no espaço da solução, usando a função coerência para esse efeito, seleccionando o valor de velocidade e o erro do DTM como o valor máximo da função coerência. Este método é pouco rigoroso e assume que todos os dados têm a mesma variância de erro (ou pesos). Por isso, em 2006, Kampes propõe uma metodologia alternativa na qual usa os mínimos quadrados inteiros para estimar as ambiguidades de fase, bem como a velocidade e os erros do DTM. Relativamente à técnica de referência são realizadas propostas de
2
alteração no modelo funcional e no modelo estocástico. Na técnica de referência PS é utilizado um modelo linear do deslocamento durante a estimação utilizando dados de fase enrolados. Isto tem a desvantagem de que deslocamentos não-modelados (não-lineares) podem induzir a erros na estimação do sinal atmosférico. Além disso, se o deslocamento for significativamente diferente da estimação do modelo, pode não ser possível encontrar uma solução. Neste algoritmo, o modelo funcional é estendido para permitir estimações dos parâmetros de deslocamento cinemáticas, ou seja, o deslocamento é completamente parametrizado. Relativamente ao modelo estocástico, é assumido na técnica PS de referência que os dados interferométricos têm igual peso. Isso pode não ser correcto, por exemplo, devido a diferenças nas condições atmosféricas durante as aquisições. Neste estudo é formulada uma estimativa da componente para a variância do modelo estocástico baseada nas observações de fase originais. Este modelo tem em conta existência de ruído aleatório e variações das condições atmosféricas durante as aquisições. Os factores de variância deste modelo são estimados depois de uma estimação inicial utilizando um modelo estocástico tradicional.
1.2 Estado de Arte
Um dos primeiros trabalhos que demonstraram a aplicabilidade da interferometria SAR na medição da deformação do terreno foi apresentado por Massonet et al., [1993] que consistiu no mapeamento do deslocamento da superfície do solo devido ao terramoto de Landers em 1992, utilizando um par de imagens SAR recolhidas antes e depois do sismo. Os dados acerca do deslocamento da superfície permitiram a compreensão da distribuição da deformação e da dinâmica das rupturas durantes os sismos, contribuindo para descobrir a localização do evento, a geometria da falha e o campo de deformação. A importância desta técnica no estudo de fenómenos sísmicos foi já provada em variados trabalhos [Massonet et al., 1993; Massonet, 1995; Catita et al., 2005].
A aplicação InSAR permitiu também o estudo de outros fenómenos naturais, como por exemplo o mapeamento da superfície durante erupções vulcânicas [Massonnet, 1995; Lu et al., 1997; Hooper et al., 2004; Hooper, 2006; Hole et al., 2006]. A sua utilização permite adquirir informação sobre a dinâmica do magma, podendo mesmo detectar padrões na deformação da superfície com o objectivo de alertar sobre a actividade vulcânica e ocorrência de sismos que precedem as erupções em vulcões que se encontram em períodos de repouso, servindo assim de suporte à decisão na resposta aos desastres naturais [Lu et al., 2007].
Outros trabalhos de sucesso foram realizados com o intuito de determinar o movimento de glaciares e massas de gelo [Goldstein et al., 1993, Tucker et al, 2001]. O estudo dos glaciares e fluxos de gelo é conseguido com o uso de várias imagens, documentando o historial a curto prazo do manto do gelo, auxiliando na compreensão do seu impacto na mudança do nível do mar e no aquecimento global.
As imagens InSAR provaram também ser úteis no mapeamento da subsidência em meios urbanos como na cidade do México [Batuhan et al., 2011], Veneza [Tosia et al., 2009], Lisboa [Catalão et al., 2010] ou Singapura [Catalão et al., 2013].
3
Uma das aplicações mais comuns do InSAR é a geração de Modelos de Elevação do Terreno (DEMs), através de passagens sucessivas (pelo menos duas) de um sensor SAR na mesma zona. Porém existem muitos erros na construção destes modelos, como a descorrelação geométrica e temporal que ocorrem devido ao intervalo de tempo entre as aquisições dos interferogramas. Para gerar um DEM de alta qualidade, esses erros têm que ser corrigidos.
O desenvolvimento rápido das técnicas e aplicações InSAR começaram após o lançamento do satélite ERS-1 em 1991, que tinha como principal missão a monitorização dos oceanos e dos glaciares e gelos polares. Porém a qualidade da informação, o controlo sobre a órbita e a fácil distribuição de imagens, foram condições que permitiram o desenvolvimento da interferometria [Hanssen, 2001]. Em 1995 foi lançado o ERS-2, e a interoperabilidade entre os 2 satélites permitiu obter imagens com um intervalo temporal de 1 dia, fornecendo condições muito favoráveis para a produção de DEMs.
Em 2000 foi lançada a missão espacial Shuttle Radar Topography Mission (SRTM) com o objectivo de obter modelos de elevação digital para 80% do planeta de modo a criar a base de dados topográfica digital de alta resolução mais completa da Terra. Estes DEMs foram criados por interferometria SAR de passagem única através de dois sensores SAR (SIR-C/X-SAR) a bordo do shuttle Endeavour e têm 90 metros de resolução espacial, 20 metros de precisão planimétrica e precisão altimétrica de cerca de 15 metros [Rabus et al., 2003]. Este modo de aquisição sofre menos efeitos de descorrelação do que o método de aquisição em passagens sucessivas, por não ter um espaço temporal tão grande entre as aquisições [Hanssen, 2001]. Apesar destas vantagens serem sabidas, os custos são muito elevados.
O mapeamento de deformação com a técnica dos Persistent Scatterers é realizado identificando pixéis com fase estável ao longo de uma série temporal de interferogramas, sendo possível a monitorização da deformação em cada ponto [Ferretti et al., 1999a,b]. Estes pontos de elevada coerência são denominados por Persistent Scatterers (PS) e permitem a redução dos erros causados pela descorrelação, heterogeneidades atmosféricas, erros de órbita, conseguindo precisões milimétricas na medição da deformação [Ferretti et al., 2001; Colesanti et al., 2003].
O uso dos pontos PS na interferometria SAR (PSInSAR) tem sofrido várias alterações, essencialmente no desenvolvimento de novos algoritmos para o processamento dos dados com o objectivo de melhor parametrizar e descrever o comportamento dos sinais que ocorrem na fase interferométrica. O aperfeiçoamento dos sensores dos satélites também têm contribuído para aquisição de dados de melhorar qualidade, influenciando positivamente os resultados nas medições.
Com o lançamento de novos satélites com sensores SAR mais avançados (ALOS, Radarsat -2, TerraSAR-X, Tandem- X, entre outros), tornam possível o aparecimento de novas aplicações, como por exemplo o uso de sensores polarizados em combinação com a interferometria (Pol-InSAR) que oferecem a capacidade de separar a vegetação da
4
topografia, o que resultando numa melhor qualidade na representação do relevo topográfico e consequentemente uma mais precisa monitorização do terreno [Lu et al., 2007].
O constante crescimento de constelações satélite com sensores radar e a cooperação entre as várias entidades espaciais mundiais com o intuito de tornar os sistemas interoperáveis, irá permitir que muitas das limitações da interferometria sejam ultrapassadas, não só pelo facto de a existência de vários satélites reduzir a base temporal entre aquisições mas também pelo uso de observações em simultâneo das várias técnicas, tornando assim os sistema SAR/InSAR uma importante ferramenta cada vez mais importante no apoio à decisão em tempo quase real.
1.3 Objectivo do trabalho
O objectivo deste projecto consiste no estudo detalhado do método dos mínimos quadrados inteiros e do processo de cálculo da estimativa da componente da variância no processo interferométrico. Para o efeito será desenvolvida uma aplicação informática que permita sequenciar o algoritmo proposto por Kampes [2006] apresentando-se a análise numérica das principais etapas deste algoritmo. O estudo de caso será realizado com uma série temporal de imagens SAR do satélite ERS1 adquiridas entre 1995 e 2000 sobre a ilha de Singapura.
Como no algoritmo é realizado um uso intensivo dos mínimos quadrados, a precisão dos parâmetros estimados será calculada a partir de uma matriz de variância-co-variância determinada a partir da propagação dos erros utilizando um modelo estocástico (ao contrário da técnica de referência que utiliza apenas uma função de coerência).
1.4 Organização do trabalho
Este documento encontra-se estruturado em vários capítulos, que seguem a estrutura hierárquica do algoritmo STUN (semelhante ao esquema exibido na Figura 5). No primeiro e presente capítulo são apresentadas as limitações da interferometria SAR e a importância da técnica PS na resolução desses problemas. A detecção e monotorização da subsidência são conseguidas recorrendo ao algoritmo STUN que sugere algumas melhorias face à técnica de referência Persistent Scatterers de Ferreti et al., 2001. No capítulo 2 é explicada de um modo geral a técnica Persistent Scatterers na interferometria SAR pelo método de Ferreti et al., [2001], considerada neste documento como a técnica de referência.
O estimador do valor inteiro pelo método dos mínimos quadrados, abordado no capítulo 3, é no momento o método que oferece maior probabilidade de estimação correcta do valor inteiro das ambiguidades. Este capítulo divide-se essencialmente em duas partes, uma primeira explicando o princípio do método; a segunda explicando como adaptar este algoritmo para que possa ser aplicado na interferometria utilizando os Persistent Scatterers.
5
O STUN é o algoritmo utilizado para estimar as ambiguidades de fase, e depois como resultado da sua aplicação também a velocidade e os erros do DEM. Este é descrito no capítulo 4.
No capítulo 5 é abordado o estudo de caso na ilha de Singapura, onde são apresentados os dados de entrada para o algoritmo utilizado com o intuito de demostrar o método, bem como o processo realizado para a sua obtenção. Uma análise dos resultados pormenorizada é realizada, realçando em detalhe a metodologia aplicado em cada passo. Por fim no último capítulo são apresentadas as conclusões do trabalho e algumas considerações finais.
6
2 Persistent Scatterers na Interferometria SAR
2.1 Interferometria SAR
Os sistemas SAR (Synthetic Aperture Radar) funcionam na banda de frequências designada por microondas adquirindo e registando imagens das propriedades dieléctricas e geométricas da superfície terrestre em quaisquer condições atmosféricas, de dia ou de noite [Simons and Rosen, 2007]. O processo de formação de uma imagem consiste na transmissão e registo de uma série de pulsos codificados a partir de uma antena que ilumina numa visada lateral uma porção da superfície terrestre distanciada do traço do satélite (Figura 1).
No conceito SAR é criada artificialmente uma antena sintética usando o movimento da verdadeira antena combinando a informação de muitos pulsos recebidos no espaço do comprimento da antena sintética. Esta metodologia tem como consequência um enorme aumento da resolução em azimute [Hanssen, 2001]. No caso de uma antena de 10 m de comprimento a resolução azimutal é de 5 km na imagem radar e 4 m na imagem SAR. A resolução em distância mantém-se inalterada.
A interferometria SAR resulta da combinação de duas imagens SAR adquiridas em simultâneo por duas antenas, ou imagens adquiridas em diferentes tempos em condições geométricas semelhantes. Combinando coerentemente os sinais de duas antenas, a diferença de fase interferométrica entre os sinais recebidos pode ser calculada para cada pixel da imagem ou ponto do terreno. Neste cenário, a diferença de fase é relacionada com a diferença da distância geométrica para o ponto imagem o que depende da topografia/elevação. Conhecendo a geometria da aquisição interferométrica a diferença de fase pode ser convertida em altitude para cada ponto imagem. A primeira e principal aplicação da interferometria SAR foi a cartografia da elevação do terreno.
7
Figura 1 – Geometria de aquisição Radar
A informação topográfica pode ser obtida a partir da diferença de fase, ou seja, a partir do interferograma. A variação de fase devido à deformação do solo está ilustrada de maneira simples na Figura 2, onde a diferença da distância nas duas passagens (d) do satélite e um ponto na superfície topográfica é calculada como a diferença de fase das duas imagens (φ2-φ1) multiplicada por metade do comprimento de onda da onda radar (λ).
Figura 2 – Esquema da medição da deformação do solo pela técnica InSAR
A diferença de fase entre duas imagens é calculada como a multiplicação complexa das duas imagens da qual resulta uma nova imagem: o interferograma (Figura 3). Cada pixel desta imagem contém a informação da diferença de fase entre os pixéis das duas imagens e do produto da amplitude das duas imagens SAR. A diferença de fase de cada pixel no interferograma resultante é uma medida da variação relativa da distância entre o scatterer (ponto reflector) e a antena de SAR, como demonstrado na Figura 2.
A técnica InSAR resulta assim na combinação dos dois complexos (amplitude e fase) e na co-registo das imagens de radar da mesma área de uma perspectiva quase idêntica.
8
Se a distância espacial entre a aquisição das duas imagens for suficientemente grande (maior que 200 m e menor que 1000 m), é possível calcular a as diferenças de altitude dos pixéis da imagem e construir um modelo de elevação digital (DEM), assumindo que não ocorreu uma deformação em grande escala entre duas aquisições.
Figura 3 – Interferograma InSAR, valor da fase em radianos
Por outro lado, é possível obter informação sobre a deformação, caso sejam coincidentes no espaço, ou se existir disponível um DEM da área. Este último é conseguido através da modelação das contribuições da fase topográficas com base numa entrada de um DEM e da geometria da imagem. As contribuições da fase decorrentes da topografia são então subtraídas ao interferograma geral. Esta técnica permite a geração de mapas de deformação de alta precisão.
2.2 Limitações da técnica InSAR
2.2.1 Coerência
A fase interferométrica é o resultado de diversos processos de interacção do sinal electromagnético com o meio que sob determinadas condições degradam a fase falseando a relação fase/distância. Uma medida da exactidão da fase de um interferograma é dada pela coerência , Eq. (2.1), de cada pixel do interferograma [Hanssen, 2001; Simon and Rosen, 2007]. A coerência é definida como a magnitude da correlação complexa | | e é estimada a partir das imagens como uma média espacial num conjunto N de pixéis:
√ {| | } {| | } (2.1) Valores baixos de coerência significam fraca qualidade do interferograma e valores de coerência próximos da unidade representam elevada precisão na informação extraída do
9
interferograma. O efeito de descorrelação ), falta de coerência, é o aparente aumento do ruído da fase interferométrica estimada.
São vários os factores que afectam o valor da coerência [Hanssen, 2001]: falta de sobreposição espectral em range e azimute (G) descorrelação do centro Doppler (DC),
descorrelação volumétrica (vol), ruído térmico (termal), descorrelação temporal ( ) e
pelo ruído no sistema radar e do processamento ( ). Estes elementos afectam a coerência total de forma multiplicativa.
Os factores que mais afectam a descorrelação de uma imagem são a descorrelação geométrica (G) e a descorrelação temporal ( ).
2.2.2 Descorrelação Temporal
A descorrelação temporal do alvo entre as aquisições causa uma perda significativa da coerência entre os pixéis correspondentes num par de imagens e resulta normalmente das mudanças no coeficiente de reflexão complexo da imagem, não permitindo a realização de medições viáveis em áreas com vegetação e onde os perfis electromagnéticos e/ou as posições dos scatterers mudem com o tempo dentro do célula de resolução.
2.2.3 Descorrelação Geométrica
Variação na fase ocorre com diferentes geometrias de visualização, uma vez que a localização relativa dos pontos scatterer depende da posição de visualização. As diferentes geometrias de visão são causadas pela linha de base do satélite, ou seja, pela diferença na posição da órbita de uma passagem satélite para a passagem seguinte. Nas configurações geométricas das imagens que produzem o interferograma é importante garantir que a base perpendicular não ultrapasse os 1200 m, o que pode originar uma perda total de correlação entre as imagens. Este limite máximo é denominado como a linha de base crítica, e é dependente do comprimento de onda do radar, do sensor de distância do alvo, da resolução de alcance e do ângulo de incidência (o ângulo de a direcção visual do nadir satélite). Quanto maior for a base geométrica maior será a descorrelação geométrica, o que produz por consequente um maior ruído nos dados de diferença de fase dos interferograma, limitando assim o número de pares de imagens adequado para aplicações interferométricas e impedindo a exploração em pleno do conjunto de dados disponíveis.
2.2.4 Efeitos Atmosféricos
Os efeitos atmosféricos são possivelmente o factor mais limitante nas técnicas geodésicas. Os efeitos que se encontram presentes nos interferogramas podem comprometer seriamente a monitorização precisa da deformação. O sinal atmosférico presente nos interferogramas provém da distribuição do vapor de água existente na atmosfera e de variações na ionosfera, ambas afectando a programação do sinal radar. Esta componente do sinal atmosférico da fase é também chamada de Atmospheric Phase
10
Screen (APS), e produz franjas interferométricas adicionais. Caso haja coerência suficiente, estas heterogeneidades podem muitas vezes ser reconhecidas no interferograma.
2.3 A técnica Persistent Scatterers
Como referido atrás, a descorrelação geométrica e temporal e os efeitos atmosféricos são factores condicionantes que muitas vezes impedem a interferometria SAR de ser um instrumento operacional para a monotorização da deformação da superfície e reconstrução de perfis topográficos. Além disso, as perturbações atmosféricas podem ainda comprometer fortemente a exactidão dos resultados.
Contudo sabe-se que os efeitos atmosféricos mostram uma forte correlação espacial dentro de cada aquisição individual SAR, mas que estes não são correlacionados no tempo. Por outro lado, o movimento do alvo é fortemente correlacionado com o tempo, assumindo um modelo de deformação linear no tempo, mas pode apresentar diferentes graus de correlação espacial.
Ao utilizar longas séries temporais de imagens interferométricas SAR é possível identificar e utilizar pontos naturais reflectores estáveis ou Persistent Scatterers, que permitem minimizar estes três problemas permitindo processar séries temporais de imagens SAR com cerca de 5 anos. Os pontos são escolhidos através de uma análise estatística das amplitudes, de modo a mitigar os efeitos da descorrelação. Em relação a estes pixéis, é possível alcançar a precisão milimétrica e detecção de movimento do terreno do DEM, uma vez que as contribuições do efeito atmosférico podem ser amenizadas.
Assim o principal objectivo dos Persistent Scatterers (PS) na Interferometria SAR é a identificação de pixéis na imagem, coerentes em longos intervalos de tempo, sendo o ponto de partida, um conjunto de interferogramas diferenciais que utilizam a mesma imagem de referência, designada por imagem master.
A técnica dos PS foi proposta por Ferretti [Ferreti et al., 2001], e é capaz de detectar e medir deslocamentos em áreas urbanas com precisão milimétrica, tendo sido designada pelos autores como Permanent Scatterers. Por ter sido registada com direitos de autor a comunidade científica passou a designar esta técnica como Persistent Scatterers.
A técnica PS em suma segue os seguintes passos na sua implementação [Ferreti et al., 1999a,b]:
1. Processamento dos interferogramas; 2. Processamento D-InSAR;
3. Detecção dos Persitent Scatterers; 4. Estimação do Dem e da velocidade.
11 2.3.1 Formação dos interferogramas
Os interferogramas são obtidos através da multiplicação complexa dos valores complexos de uma imagem, pixel a pixel, pelo complexo conjugado dos valores da outra imagem que forma o par interferométrico [Massonnet et al., 1993].
O primeiro passo do processamento interferométrico consiste no co-registo das imagens disponíveis (slave) em relação a uma única imagem de referência (master), como se estas tivessem sido obtidas a partir do mesmo plano orbital [Ferreti, A., et al, 2001]. Esta operação consiste no alinhamento das imagens slave relativamente à imagem de referência, através da determinação de um polinómio de interpolação [Kampes et al., 2003], onde as imagens slave são reamostradas na grelha espacial da imagem master com uma precisão na ordem da fracção da dimensão do pixel [Kampes, 2006].
A imagem master é seleccionada maximizando o conjunto de coerência [Colesanti et al., 2003] do conjunto interferométrico, facilitando assim a interpretação visual dos interferogramas e ao mesmo tempo ajudando a avaliação da qualidade, ou seja, é seleccionada como imagem master o interferograma que tiver um maior valor de . Assim para K+1 imagens SAR, são formados K interferogramas em relação a uma imagem master.
O conjunto de coerência para um conjunto com uma imagem master é definido como
∑ ( ) ( ) (2.2) onde { | | | | (2.3) e é a base perpendicular entre a imagem m e a k no centro de imagem, a base
temporal (em anos), e a base Doppler (a média Doppler das diferenças do centróide). O divisor c pode ser considerado como uma base crítica para qual a descorrelação total é esperada para alvos com uma destruição scatterer. Os valores apresentados na Eq. (2.2) são típicos para o ERS. Mas podem ser facilmente adaptados para qualquer outro sensor com diferentes comprimentos de onda, ângulo de incidência, e/ou largura de banda. As imagens são ordenadas de acordo com o tempo de aquisição. Um filtro azimutal é aplicado após a reamostragem com o objectivo de tornar comparáveis o valor da amplitude relativa das diferente aquisições, podendo-se então calcular o interferograma complexo, que é construído a partir da multiplicação complexa entre a imagem master e cada imagem slave reamostrada.
Os interferogramas diferenciais são obtidos realizando uma subtracção entre a fase do modelo digital do terreno e o interferograma complexo após a correcção da curvatura
12
terrestre. A componente da fase interferométrica que é induzida pela topografia é praticamente toda eliminada pelo uso da técnica diferencial, [Bürgmann et al., 2000; Eineder, 2003; Massonnet and Sigmundsson, 2000; Rosen et al., 2000].
O interferograma diferencial é o resultado final do processamento interferométrico e a série temporal de interferogramas diferenciais os dados de entrada da técnica dos PSs.
2.3.2 Formulação do problema
A estimação das componentes da fase após o cálculo dos interferogramas é então dada pelo seguinte modelo funcional [Ferreti et al., 2001]:
(2.4)
onde é a fase interferométrica diferencial desenrolada, o valor da fase devida
aos erros do DTM (fase topográfica), a fase causada pelo deslocamento do alvo no tempo entre as aquisições, a fase devido ao atraso atmosférico e o
ruído adicional.
A fase topográfica é praticamente uma função linear da base perpendicular, e pode ser expressa da seguinte forma
(2.5)
onde, é a distância entre o sensor master e o pixel, o ângulo incidento local, o factor de conversão de altura fase para o ponto , e é o erro do DEM. O deslocamento de cada ponto é obtido utilizando-se o seguinte modelo linear do tempo
(2.6)
onde, é o comprimento de onda do sinal portador do radar, a base temporal relativa à imagem master, e a taxa de deslocamento média no ponto . A fase
devido ao atraso atmosférico do sinal não pode ser modelada, apenas podendo ser
reduzida consideravelmente utilizando as diferenças de fase entre pontos próximos. O termo do ruído contém todas as outras contribuições de fase.
2.3.3 Selecção dos candidatos a PS
Os Persistent Scatterer Candidates (PSC) são pontos que deverão ter o comportamento dos PS [Ferretti et al., 2001]. Estes servirão para estimar a fase atmosférica destes pixéis em todos os interferogramas. A melhor abordagem para se conseguirem PSCs, caso se tenha uma longa série temporal de imagens InSAR, consiste em analisar os valores de amplitude de cada pixel na área de interesse, procurando-se por scatterers estáveis. A
13
relação entre o índice de dispersão da amplitude e o desvio padrão da fase é definido pela seguinte expressão
̂
̅ (2.7)
onde é o desvio padrão temporal da amplitude e ̅ a média temporal da amplitude para um determinado pixel.
Em teoria um pixel que apresente valores de fase consistentes durante todas as aquisições deverá ter valores de dispersão de amplitude baixos. Assim esta relação permite identificar pontos coerentes sem ter que se analisar a fase, que também não seria possível nesta altura uma vez que as variáveis dos sinais que constituem a fase são ainda desconhecidas. Outra razão deve-se ao facto de que os valores absolutos da amplitude são insensíveis à maior parte dos fenómenos que contribuem para os valores da fase, como o APS, erros do DEM, deformações do terreno, indeterminações de órbita, entre outros. Os PSCs são seleccionados do conjunto de pixéis com valores do índice dispersão da amplitude compreendidos entre 0,25 e 3. Contudo é necessário que as imagens estejam radiometricamente calibradas a fim de permitir a estimativa do desvio padrão, e que a densidade dos PSCs seja entre 3-4 , senão o sinal atmosférico não pode ser correctamente interpolado.
Na Figura 3 encontra-se o resultado de uma simulação realizada [A. Ferreti et al., 2001], onde é possível observar que os valores do índice de dispersão e o desvio padrão da fase têm um comportamento semelhante até aos 0.3.
Figura 4 – Comparação entre o índice de dispersão e o desvio padrão da fase
Outra vantagem em usar esta abordagem reflecte-se no rápido processamento e que não existe uma perda de resolução, algo que acontece quando se utilizam algoritmos de coerência, uma vez que estes são baseados em médias móveis que vão mudar o valor do scaterrer e eliminar pixéis adjacentes [Rocca et al., 2000].
14 2.3.4 Maximização da coerência
Uma vez que os dados estão enrolados, não é possível a estimação directa dos parâmetros pela Eq. (2.4) por se tratar de um sistema não linear. Deste modo é necessário realizar uma estimativa das incógnitas numa vizinhança próxima, devido às contribuições de fase serem enroladas e ter de se considerar uma diferença menor que [Kampes, 2006]. Consideremos dois pixéis no interferograma com uma distância não superior a 2 km, de modo que os efeitos atmosféricos sejam considerados idênticos nos dois pixéis. Se calcularmos a diferença de fase entre estes dois pixéis usando a equação 2.4 eliminamos os termos atmosféricos das órbitas resultando na seguinte equação:
(
)
(2.8)
Em que é o valor da diferença de fase nos dois pixéis e e a diferença
do erro do DTM e a diferença de velocidade. Neste caso, estamos perante um sistema linear que poderá ser resolvido por métodos indirectos de pesquisa da solução no espaço da solução. As variáveis a determinar são e .
Ferretti et al., [2001] propuseram a utilização da função de coerência do valor complexo da fase:
̂ ∑
(2.9) onde, é uma unidade imaginária e é a diferença entre a fase observada e modelada
entre os pontos e no interferograma , dado pela equação 2.8. Assim a solução para o erro do DEM e deslocamento, ou seja o valor máximo de | ̂ |, pode ser encontrada
num espaço de solução bi-dimensional, onde os resíduos de fase não podem exceder
na maioria dos interferogramas (contudo um valor mais razoável,
, é proposto [Colesanti et al., 2003].
O valor absoluto da coerência encontra-se no intervalo [0,1], onde uma coerência de 1 significa correspondência completa da fase modelada com a fase observada. O ângulo da coerência complexo traduz a estimativa para o sinal atmosférico da imagem master em todas as outras imagens [Ferretti et al., 2001].
2.3.5 Estimação dos Valores do APS
As heterogeneidades atmosféricas durante as aquisições radar são assumidas como não correlacionadas no tempo e correlacionados no espaço. Portanto, o sinal atmosférico pode ser isolado a partir de outros componentes da fase residual por filtragem passa-baixo no domínio espacial e filtragem passa-alto no domínio temporal.
15
Numa primeira fase os pontos PSC são estimados directamente em relação a um pixel de referência, onde as contribuições de fase são aproximadamente estimadas em cada interferograma diferencial. As componentes de fase para cada PSC são estimadas por meio de um algoritmo iterativo, e depois interpolados pelo método de krigging com a resolução original dos interferogramas diferenciais para toda a área formando uma imagem contínua. Contudo, nesta abordagem, devido à APS ser estimada através de uma aproximação planar, esta técnica está restringida a uma área não superior a 5x5 km [Ferretti et al., 2001].
2.3.6 Nova selecção dos PS
Apesar de nesta fase já se ter estimado a velocidade do alvo e os erros provenientes do DEM para os pixéis da imagem (seleccionados através do índice de dispersão), devido às limitações do método de selecção dos pontos PSC alguns PS podem ter sido negligenciados.
A APS interpolada é subtraída a cada interferograma diferencial, e são pesquisados pontos PS. Isto é realizado pixel a pixel (não entre pixéis próximos, embora ainda com respeito a uma referência), uma vez que não há mais necessidade de considerar as diferenças de fase entre pontos próximos. Os cálculos da estimativa inicial, descritos na secção anterior, são realizados entre pontos próximos porque de outra forma o sinal atmosférico impediria uma estimativa correcta.
O mesmo periodograma que foi utilizado durante a estimativa preliminar Eq. (2.9), é também utilizado nesta fase, e novamente pontos com uma coerência menor que | ̂| são descartados.
No final o número de pontos que podem ser finalmente utilizados, é na ordem de algumas centenas de pontos por metro quadrado (em áreas urbanas).
16
3 Estimador do valor inteiro pelos mínimos quadrados
Neste capítulo será abordado o método de estimação inteira por mínimos quadrados. Depois de uma breve apresentação dos fundamentos matemáticos do método apresenta-se a sua aplicação ao deapresenta-senrolamento da faapresenta-se em InSAR.
3.1 Introdução
O método LAMBDA, proposto por Teunissen em 1995 tinha como objectivo a estimativa das ambiguidades do sinal do GPS. Porém o uso de observações num curto intervalo de tempo produz ambiguidades que são fortemente correlacionadas e que deterioram a precisão das estimações de posição. A fim de conseguir uma precisão tolerável [Tiberius and Jonge, 1995], é necessário restringir os parâmetros de ambiguidades ao seu valor inteiro. Aplicando uma transformação de descorrelação pelo método LAMBDA, uma grande parte da correlação existente entre ambiguidades é reduzida em grande escala, tornando muito mais eficiente a procura do valor inteiro da ambiguidade nos vectores. O método LAMBDA consiste essencialmente em duas etapas: primeiro as ambiguidades são descorrelacionadas, por meio de uma transformação-Z (onde a construção desta é onde é depositado o maior esforço); em seguida, o problema de minimização inteiro é resolvido por uma procura discreta sobre uma região elipsoidal. O método utiliza o método dos mínimos quadrados para estimar os valores inteiros das ambiguidades, utilizando ambiguidades flutuantes e a sua matriz variância-covariância.
3.2 O Método LAMBDA
3.2.1 Equações de observação
O ponto de partida é um sistema de equações linearizadas, utilizando um modelo matemático simples (adequado para base de curtas distâncias, embora o método não seja exclusivamente restrito a ele). Ocorrem dois tipos de incógnitas: as coordenadas da base (guardados no vector b) e as ambiguidades de diferenças duplas (guardadas no vector a). Outras incógnitas, como os parâmetros do atraso atmosférico, também podem ser incluídas no vector b.
As equações de observação de diferenças duplas linearizadas são obtidas no seguinte sistema linear de equações:
(3.1) onde
é o vector de observações menos as medições de diferenças duplas calculadas, o vector que contém os incrementos das coordenadas da base , o vector de ambiguidades de diferenças duplas, uma matriz para as coordenadas da base,
17
uma matriz para as ambiguidades e um vector de efeitos não modelados e medições de ruído.
3.2.2 Critério de estimação
O critério de estimação é baseado no princípio dos mínimos quadrados (a soma ponderada do quadrado dos resíduos deve ser minimizada), o cálculo das estimativas para as coordenadas da base e as ambiguidades das diferenças duplas, é conseguido a custa da resolução da seguinte minimização:
‖ ‖ (3.2)
onde a matriz de variância-covariância das observáveis é definida por . Este problema de minimização é conhecido como o problema dos mínimos quadrados inteiros [Teunissen, 1994].
A estimação dos parâmetros é realizada em três passos. Estes são: a solução flutuante, a estimação do valor inteiro da ambiguidade e a solução fixa.
3.2.3 Solução flutuante
Neste primeiro passo, simplesmente ignora-se os constrangimentos inteiros sobre as ambiguidades e executa-se um ajustamento comum. Como resultado, obtém-se os valores reais das estimativas e pelos mínimos quadrados, juntamente com as suas matrizes de variância-covariância. Esta solução é referida muitas vezes, como a solução flutuante e é indicada pelas variáveis ̂ e ̂. As matrizes de variância-covâriancia correspondentes são denotadas por ̂ e ̂.
3.2.4 Estimação do valor inteiro da ambiguidade
No segundo passo, a ambiguidade flutuante estimada ̂ é usada para calcular o número inteiro correspondente da ambiguidade estimada. Isto implica calcular um mapeamento , do espaço de dimensão-n de valores reais para o espaço de dimensão-n de valores inteiros.
Isto consiste em
‖ ̂ ‖
̂ (3.3)
Esta minimização produz a estimativa do valor inteiro dos mínimos quadrados para o vector de ambiguidades ̂. Para esta etapa é usado o método LAMBDA [Teunissen, 1995], onde as suas duas principais características são: 1) a descorrelação das ambiguidades, por meio de uma reparametrização (transformação-Z), das ambiguidades originais para novas ambiguidades , e 2) a estimação do inteiro da ambiguidade.
18
̂ ̂ ̂ ̂
(3.4) A eficiência do método provém do passo de descorrelação [Teunissen et al., 1994]. Para a estimação do valor inteiro da ambiguidade são utilizados o vector de ambiguidades dos valores reais estimados ̂ e o factor de Cholesky . O factor é então dividido em e , de tal forma que ̂ , onde D é a diagonal e L o triângulo inferior.
Antes da estimação do valor inteiro, é necessário descorrelacionar as ambiguidades através da transformação-Z, onde são utilizados directamente os factores e :
̂ ̃ ̃ ̂ (3.5)
A minimização do inteiro é então realizada nas ambiguidades transformadas, [Teunissen, 1994]. Na prática, a minimização restringe a procura sobre uma grelha de pontos dentro de uma elipsóide de ambiguidades de dimensão , definida pela matriz de variância-covariância das ambiguidades.
̂ ̂ ̂ (3.6)
O volume do elipsóide (e o número de candidatos) pode ser controlado alterando o valor . A contribuição do volume do elipsóide é importante no processo da estimação do valor inteiro das ambiguidades, uma vez que além de ser invariante na escolha do tipo de transformação de descorrelação, foi demonstrado também que dá uma boa indicação do número de pontos na grelha que existem no espaço de procura [Teunissen et al., 1996].
A minimização do inteiro real é então calculada nas ambiguidades transformadas, resultando em ̌. Utilizando a matriz-Z é depois possível transformar de volta para as ambiguidades originais
̌ ̌ (3.7)
3.3 Solução fixa
Na solução final as ambiguidades são fixadas à sua estimação por mínimos quadrados ̌. Uma vez calculadas as ambiguidades inteiras, estas são utilizadas no terceiro passo
19
para finalmente corrigir a estimativa flutuante de ̂. O resultado ̌ e ̌ correspondente são referidos como a solução fixa. Esta fase baseia-se no pressuposto de que após a “etapa de fixação” as ambiguidades são quantidades conhecidas, onde a taxa de sucesso da determinação destas depende essencialmente de três factores: as equações de observação (modelo funcional), a precisão das observações (modelo estocástico) e do princípio escolhido param a estimação do valor inteiro [Joosten and Tiberius, 2000].
3.4 Aplicação do Método LAMBDA na interferometria radar
No caso da interferometria radar, as observações enroladas de fase (diferenças), , são desenroladas por
(3.8) com valor inteiro da ambiguidade para cada interferograma k. Desde modo, a aplicação do método LAMBDA parece simples, tendo a existência deste método já ter sido mencionada [Hanssen and Ferreti, 2002; Hanssen et al., 2001; Bianchi, 2003], onde já se terá realizado uma primeira avaliação simplificada de um estimador por mínimos quadrados para PS utilizando dados simulados. No entanto os problemas para GPS e PS não são idênticos. A principal diferença reside no facto de que na interferometria radar o problema é subdeterminado, uma vez que cada observação tem uma ambiguidade desconhecida, que tem de ser estimada, além dos parâmetros de interesse Eq. (3.8). A solução para este problema só pode ser obtida recorrendo ao facto de que as ambiguidades são valores inteiros. Uma restrição mais prática tem que ser mantida tendo em conta o número de estimativas que precisam de ser executadas é muito maior no caso dos PS, do que para o GPS, porque o número de pontos é muito maior. Além disso, o número de aquisições, ou seja, o número de ambiguidades que precisam de ser estimadas, pode ser significativamente maior do que para GPS.
O modelo funcional para a diferença de fase entre dois pontos x e y, é
dado por
{ }
(3.9)
onde, é a posição do sub-pixel em azimute e um polinómio algébrico para bases temporais. Estes dois termos serão abordados com mais detalhe na secção 4.2. As diferenças de fase da atmosfera, órbita, e ruído são introduzidos numa nova variável e com expectativas de { } . Em notação de matriz, este sistema de observação é escrito como
20 { [ ] } [ ] [ ] [ ][ ] (3.10)
A tarefa consiste em estimar K ambiguidades inteiras e 2+D parâmetros de valores reais dos K valores de observações de fase enroladas. Uma vez que não é necessário estimar as posições dos sub-pixéis de azimute (pois já foram estimados nas imagens de amplitude), restam apenas 1+D parâmetros de valores reais para se estimar. Para resolver então este novo sistema de equações, é necessário adicionar restrições adicionais, utilizando pseudo-observações [Bianchi, 2003; Hanssel et al., 2001]
{ } [ ] [ ] { } [
] (3.11)
As matrizes , , e são definidas na Eq. (3.10). é uma matriz de zeros ,
e é uma matriz identidade . O valor das pseudo-observações foi definido como
. A variável { } Indica a dispersão das observações, pois a dispersão residual de fase não é bem conhecida a priori, uma vez que não é garantido que os pontos sejam coerentes ao longo do tempo (porque foram escolhidos com base no índice de dispersão da amplitude), e acompanha o modelo de deslocamento do modelo utilizado. A matriz
acompanha a propagação da matriz de variância-covariância da matriz origina de
observações de fase nas imagens SAR. A dispersão das pseudo-observações acompanha a incerteza a priori dos parâmetros desconhecidos. Valores razoáveis para estes parâmetros são por exemplo para o erro do DEM, para a taxa de deslocamento linear, e para a posição do sub-pixel do azimute (para sensores com uma resolução azimutal similares as do ERS). Este sistema aumentado de equações pode ser simbolicamente escrito como
{ } { }
(3.12) De modo a usar toda a informação a priori disponível, serão utilizadas pseudo-observações para cada parâmetro desconhecido. A solução flutuante para as ambiguidades ̂ podem ser obtidas utilizando o seguinte modelo [Teunissen, 2000]:
̂ ̅ ̅ (3.13)
̂
(3.14)
onde ̅ e . Esta solução flutuante é depois transformada usando a Eq. (3.4), obtendo-se ̂ ̂. É depois realizada uma procura no
21
quadrados para as ambiguidades. Estes inteiros estimados são depois utilizados para computar a solução fixa ̌ para os parâmetros desconhecidos.
̌ ̌
(3.15) gerando o seguinte sistema de equações
{ ̌ } { ̌ } (3.16)
A estimação por mínimos quadrados para os parâmetros flutuantes é dado por
̂ , (3.17)
̌ ̂ ̌ , (3.18)
onde a matriz ̂ é a matriz de variância-covariância que descreve a precisão dos parâmetros flutuantes estimados.
22
4 O algoritmo STUN
Kampes [2006] propõe essencialmente duas alterações à técnica original de Ferretti et al.,[2001] na qual a fase desenrolada é determinada com recurso aos mínimos quadrados inteiros e as observações podem assumir precisões diferentes.
Para resolver este problema é utilizado o algoritmo Spatial Temporal Unwrapping Network (STUN) (Figura 5), que realiza o desenrolamento da fase numa grelha espacialmente dispersa utilizando o método dos mínimos quadrados e um modelo de deslocamento linear no tempo.
Após uma introdução explanatória da necessidade de existir o desenrolamento de fase na secção 4.1, segue-se a descrição do modelo funcional (secção 4.2) e do modelo estocástico (secção 4.3) utilizados neste algoritmo. De seguida, a secção 4.4 é explicado a estimação da componente da variância para obter o modelo estocástico usado no estimador por mínimos quadrados. A estimação da rede de referência é descrita na secção 4.5, seguido da estimação dos pontos em relação à rede de referência implantada (secção 4.6). Por fim, na secção 4.7 é descrito o desenrolamento da fase e a estimação final utilizando os dados desenrolados.
4.1 Desenrolamento tri-dimensional da fase
O valor da fase registado numa imagem SAR está compreendido no intervalo [-π,π). A determinação do valor absoluto da fase (número de ciclos entre o satélite e a superfície) não é possível de uma forma rigorosa numa imagem SAR devido ao facto de existir descorrelação temporal e geométrica e de que cada ponto tem a sua própria ambiguidade desconhecida, não permitindo assim estimar correctamente a fase desenrolada sem uso de informação a priori.
Para se encontrar uma solução para o desenrolamento da fase, é necessário assumir que a fase desenrolada entre pixéis adjacentes é limitada pelo intervalo , ou seja, a fase que é afectada pela topografia, deslocamento e atmosfera, tem um comportamento semelhante em pixéis próximos. Se esta suposição for correcta para todas as diferenças de fases desenroladas entre pixéis próximos, então as diferenças da fase enrolada são iguais às diferenças da fase desenrolada, e o desenrolamento pode ser simplesmente obtido por integração das diferenças de fase enrolada ao longo de um caminho arbitrário, começando num ponto também arbitrário.
23
24
Contudo, uma vez que os interferogramas são gravemente afectados por descorrelação, não é possível desenrolar correctamente a fase devido ao aumento da distância entre pontos, o que aumenta a probabilidade de as diferenças de fase desenrolada serem maiores do que (particularmente para bases espaciais e temporais longas, onde há maior diferença do sinal topográfico, deslocamento ou atmosférico). Portanto, é necessário em primeiro lugar, remover a maior parte das componentes do sinal antes de se poder desenrolar a fase.
A utilização de uma rede (Figura 6) pode ser utilizada para a resolução deste problema [Costantini and Rosen, 1999; Eineder and Holzner, 1999; Yong et al., 2002], onde os parâmetros podem ser estimados entre pontos próximos, e depois serem integrados a partir de um ponto de referência, resultando no desenrolamento da fase.
Figura 6 – Rede que demonstra as ligações mínimas necessárias para resolver o problema de
desenrolamento de fase
Figura 7 – Rede com conexões redundantes que pode ser utilizada para detectar pontos incoerentes
e estimações incorrectas entre pontos
Contudo é possível que estimações incorrectas entre dois pontos se propaguem para os restantes, não podendo isto ser detectado. Além disso, se a fase residual num único ou em poucos interferogramas for maior do que , não se irá notar se apenas se usar fases enroladas temporais. Assim, para ultrapassar esta dificuldade, é necessário utilizar uma estratégia de desenrolamento que seja espaço-temporal, combinando as duas abordagens, a grelha de desenrolamento espacialmente distribuída e o desenrolamento temporal. Para tal é utilizado uma rede, onde as diferenças de fase no espaço e no tempo são utilizadas para desenrolar a fase nos pontos PS (Figura 7).
Para resolver este problema é utilizada uma abordagem pelos mínimos quadrados.
4.2 Modelo Funcional
A fase enrolada de um ponto num interferograma diferencial k pode ser decomposta de acordo com a equação 2.4:
{ } (4.1)
Kampes [2006] sugere alguns melhoramentos no modelo funcional, em relação à técnica de referência, especialmente no cálculo da deformação , e na introdução
25
de outra componente, que retrata a fase de dispersão de um objecto em relação à distância percorrida dentro da célula de resolução.
O deslocamento de cada ponto é obtido utilizando-se a seguinte expressão
(4.2)
onde, é o deslocamento ao longo da linha de observação do satélite desde a aquisição da imagem master. De modo a limitar o número de parâmetros que precisam de ser estimados, o comportamento do deslocamento deve ser modelado e parametrizado. O deslocamento desde o tempo que passou até à aquisição da imagem master é modelado utilizando uma combinação linear de funções de base como
∑
(4.3)
Onde polinómios algébricos para bases temporais poderiam ser usados
(4.4)
O termo de dispersão de um objecto na Eq. (4.1) depende do azimute e da distância ao solo da posição sub-pixel do centro de fase de um ponto scatterer dentro da célula de resolução (Kampes, 2006, Eq. 2.17):
( ) ( ) (4.5)
onde, é o comprimento de onda do sinal portador utilizado pelo radar, é o squint angle, e é o ângulo de incidência.
A geometria destas duas componentes pode ser observada na Figura 8. A fase no interferograma é calculada na posição do pixel, que na verdade correspondente ao limite da célula de resolução, enquanto que o centro de fase do scaterrer está na realidade localizado na posição do sub-pixel em azimute e em distância ao solo.
26
Figura 8 – Geometria da posição de um scaterrer de um sub-pixel em azimute e distância ao solo
O termo do azimute pode ser expresso em função da frequência de Doppler [Bamler and Sch¨attler, 1993],
(4.6)
onde é a velocidade instantânea do satélite no sistema de coordenadas fixado à Terra. Tendo em conta que a geometria curva tem de ser corrigida devido às diferenças de velocidade entre os meios [Cumming and Wong, 2005]. A componente de fase do azimute é pode então ser calculada por
(4.7)
O termo da distância ao solo só é influenciado pelo comprimento de onda, e uma vez que os sensor usado foi sempre o mesmo, esta componente pode ser desprezada.
4.3 Modelo Estocástico
A matriz de variância-covariância das observações de fase originais nas imagens SAR é propagada para os parâmetros estimados.
A dispersão das observações originais de fase (nas H posições) num interferograma são ordenadas num vector
[
]
(4.8)
27 { } [ ] [ ( ) ( ) ( ) ] (4.9)
A matriz descreve o ruído termal, o ruído de processamento, etc. é a matriz variância-covariância que descreve as condições atmosféricas na aquisição , e
é a distância entre os pontos e .
Uma função covariância empírica pode ser aqui utilizada para preencher a matriz anterior, utilizando uma parametrização analítica da função de covariância, na qual os parâmetros são estimados utilizando os resíduos obtidos após a estimação do erro do DEM e do deslocamento.
Organizando os vectores de observação das diferenças duplas de fase (diferença entre pontos vizinhos e entre a imagem master e cada imagem slave) de modo a que os elementos no vector fiquem ordenados de forma a que todas as fases interferométricas são dadas para o primeiro arco, depois para o segundo arco, etc. (para mais detalhe ver STUN pág. 25), a propagação da matriz variância-covariância para as diferenças da fase interferométrica em relação ao pixel de referência, é obtida pela aplicação da lei da propagação das variâncias.
Observações de diferenças-duplas
Uma vez que todas as estimações são realizadas entre dois pontos, é útil considerar este caso especial, onde a matriz variância-covariância das diferenças duplas de observações de fase é parametrizada pela equação
(4.11)
, uma vez que a dependência na distância é ignorada para a estimação relativa dos parâmetros entre pontos próximos. Assim ao assumir também que para uma pequena distância obtém-se , a matriz fica reduzida a
∑ onde, { (4.12) onde é uma matriz preenchida com uns, e é um vector com um único 1 na posição .
Assim, a matriz variância-covariância das observações das diferenças-duplas é escrita como um modelo da componente da variância, utilizando matrizes cofactores e componentes de variância . Se estes componentes foram assumidos como serem parâmetros desconhecidos, uma técnica de estimação da componente da variância pode ser utilizada para obter estimativas para estas variáveis.