vertebral por análise de imagem:
algoritmo e validação
Dissertação de Mestrado em
Engenharia Mecânica
Luís Filipe Ferreira de Sousa Mota
Orientação: José Manuel Cardoso Xavier
Filipe Alexandre Loureiro Pagaimo
Ao meu co-orientador, Engenheiro Filipe Pagaimo, e à empresa NEUROWAVE, pelos dados fornecidos.
Ao Centro Hospitalar Gaia-Espinho (CHVNG/E, E.P.E.) pelos dados que forneceu para o caso de estudo.
À minha namorada, Beatriz Alves, pela motivação que me deu, mesmos nos tempos mais difíceis quando parecia que não havia solução para os problemas.
A todos os meus colegas, que estavam sempre dispostos a ajudarem e que me acompanharam no percurso académico.
Por último, agradeço aos meus pais por me proporcionarem a oportunidade de me formar em Engenharia Mecânica e por me possibilitarem fazer este trabalho.
o seu estado e perceber como atuar para melhorar a qualidade de vida dos pacientes.
A estrutura da coluna vertebral é complexa, pois é constituída por vários elementos que permitem ao ser humano manter a posição ereta e caminhar. Para além disso, ainda protege elementos importantes do sistema nervoso. Um dos elementos da coluna que permite o movimento é o disco intervertebral, pois atua como uma junta entre as vértebras, reduzindo a fricção e absorvendo os impactos. Quando estes elementos são danificados é necessário intervir de forma a que o paciente não perca a possibilidade de se movimentar. Para tal existem vários métodos de tratamento, sendo os mais utilizados a artrodese e a artroplastia. O primeiro consiste na remoção do disco e união das vértebras adjacentes, e o segundo consiste na colocação de um dispositivo médico que tenta replicar as funções do disco intervertebral.
Este estudo consistiu na criação de um programa que permite avaliar o estado dos pacientes que sofrem de patologias ao nível dos discos intervertebrais. Esse programa possui algoritmos que permitem melhorar a qualidade das imagens obtidas através da técnica de raio X, e algoritmos que obtêm os parâmetros cinemáticos da coluna vertebral. Os algoritmos responsáveis por fornecer os parâmetros cinemáticos da coluna, que consistem nos centros de rotação e na amplitude de movimento, foram devidamente testados em condições ideais, onde não existe ruído nos dados fornecidos, e em condições mais próximas da realidade onde os dados contêm ruído, apresentando todos eles uma boa precisão e fiabilidade.
Posteriormente é feito um teste ao programa, onde são gerados quatro conjuntos de imagens artificiais em extensão e flexão, que pretendem simular as vértebras da coluna vertebral, e que vai de uma unidade funcional até quatro. O programa foi testado nestas quatro situações de forma a verificar de que forma se comporta quando é deparado com várias unidades funcionais.
diferentes algoritmos se aproximam mais entre si do que para uma e quatro unidades funcionais. Foi também testado um caso real em que o paciente sofreu uma intervenção cirúrgica ao nível da coluna cervical. Foi avaliada a evolução do paciente ao longo de três estágios, pré-operatório, pós-operatório imediatamente a seguir à cirurgia e três meses após o procedimento, sendo os resultados obtidos satisfatórios e dentro do previsto.
Os resultados obtidos nos casos estudados por este programa foram eficazes, o que demons-trou que o VisualVertebra é uma ferramenta eficiente e que pode contribuir no auxílio clínico, na avaliação da qualidade de movimento da coluna.
Palavras-Chave
Coluna Vertebral; Biomecânica da Coluna; Processamento de Imagem; Python; Algoritmo; Vi-sualVertebra
their condition and how to act to improve the quality of life of the pacients.
The structure of the vertebral column it’s complex, since it is constituted by several ele-ments that allows the human being to stand in an upright position and walk. It also protects essential elements of the nervous sistem. One of the elements of the spine that allows movement is the intervertebral disc, acting as a joint between the vertebrae, reducing friction and absorving impacts. When these elements are damaged it is necessary to intervene in a way that the pacient doesn’t lose the ability to move. Therefore, several treatment methods exist, being the most used the athrodesis and arthroplasty. The first one consists in removing the disc and union of the adjacent vertebrae, the second one consists in the replacement of the disc with a medical device that tries to replicate the functions of the intervertebral disc.
This study has consisted in the criation of a program that allows to evaluate the condition of the pacients that suffer from patologies in the intervertebral discs. This program uses algorithms that enhance the quality of the obtained X-ray images, and algorithms that obtain kinematic parameters of the vertebral column. The algorithms responsible for providing the kinematic parameters of the spine, that consist in the centers of rotation and range of motion, were properly tested in ideal conditions, where there’s no noise in the provided data, and in closer to real conditions where the data contains noise, all presenting good precision and liability.
Afterwards a test is performed on the program, where four sets of images are generated in extension and flexion, in an attempt to simulate the vertebrae of the vertebral column, going from one functional unit to four. The program was tested in these four conditions, to check how the program behaves when it is presented with multiple functional units. The tests demonstrated that for two and three functional units, the obtained data between the diferent algorithms came
where the pacient went over a surgical intervention on the cervical spine. The evolution of the pacient was evaluated throughout three stages, pre-operative, post-operative immediately after the surgery and three months after the procedure, showing satisfatory results and within expected.
The results obtained in the cases studied by this program were effective, wich demonstrated that VisualVertebra is an efficient tool and it can contribute to the clinical aid, on the evaluation of the spinal motion quality.
Keywords
Vertebral Column; Biomechanics of the Spine; Image Processing and Analysis; Python; Algo-rithm; VisualVertebra
2.2.1. Morfologia . . . 3
2.2.1.1. Curvas Normais da Coluna Vertebral . . . 4
2.2.1.2. Vértebras . . . 4
2.2.1.3. Discos Intervertebrais . . . 9
2.2.1.4. Ligamentos . . . 10
2.2.1.5. Músculos . . . 11
2.2.2. Patologias . . . 12
2.2.2.1. Disco Intervertebral Herniado . . . 13
2.2.2.2. Doença degenerativa do disco intervertebral . . . 13
2.2.2.3. Mielopatia cervical . . . 13
2.2.3. Tratamentos cirúrgicos . . . 14
2.2.3.1. Artrodese . . . 14
2.2.3.2. Artroplastia . . . 15
2.3. Biomecânica da coluna vertebral . . . 15
2.3.1. Forças atuantes . . . 16
2.3.2. Parâmetros cinemáticos da coluna vertebral . . . 17
2.3.2.1. Amplitude de Movimento . . . 17
2.3.2.2. Centro de Rotação . . . 18
2.3.2.3. Centro Instantâneo de Rotação . . . 19
2.3.2.4. Eixo Helicoidal de Movimento . . . 20
2.4. Imagiologia . . . 21
2.4.1. Radiografia . . . 21
2.4.2. Tomografia Axial Computorizada . . . 22
2.4.3. Ressonância Magnética . . . 23
2.4.4. Programas de tratamento de imagem médica . . . 24
2.4.4.1. SpineViewr . . . 24
2.4.4.2. Validação de programas de processamento de imagem . . . 25
3. Metodologia 30
3.1. Algoritmo: processamento de imagem e cinemática . . . 30
3.1.1. Leitura das imagens . . . 30
3.1.2. Ajuste das imagens . . . 32
3.1.3. Aumento de contraste . . . 34
3.1.4. Obtenção dos pontos de referência . . . 35
3.1.5. Transformação afim . . . 36 3.1.6. Desenhar as linhas . . . 40 3.1.7. Modelos de COR . . . 42 3.1.7.1. Modelo 1 . . . 42 3.1.7.2. Modelo 2 . . . 48 3.1.7.3. Modelo 3 . . . 52 3.1.8. Obtenção de resultados . . . 57
3.1.9. Cálculo das alturas . . . 60
3.1.10. Escrita dos resultados . . . 63
4. Resultados e discussão 67 4.1. Centros de rotação: certitude e multiplicidade . . . 67
4.1.1. Uma unidade funcional . . . 67
4.1.2. Duas unidades funcionais . . . 68
4.1.3. Três unidades funcionais . . . 70
4.1.4. Quatro unidades funcionais . . . 71
4.2. Caso de estudo . . . 74
4.2.1. Fase pré-operatória . . . 74
4.2.2. Fase pós-operatória: após a cirurgia . . . 75
4.2.3. Fase pós-operatória: três meses após a cirurgia . . . 77
4.3. VisualVertebra vs SpineViewr . . . 78
4.3.1. Fase pré-operatória . . . 78
4.3.2. Fase pós-operatória: após a cirurgia . . . 79
4.3.3. Fase pós-operatória: três meses após a cirurgia . . . 79
5. Conclusões 81 Referências 85 Apêndices 86 A. VisualVertebra 87 B. Códigos dos modelos do COR 99 B.1. Modelo 1 . . . 99
B.2. Modelo 2 . . . 102
2.6. Vértebra Lombar (adaptado deTortora and Nielsen (2012)). . . 8
2.7. Sacro (adaptado deTortora and Nielsen(2012)). . . 9
2.8. Cóccix (adaptado deTortora and Nielsen(2012)). . . 10
2.9. Composição do Disco Intervertebral (adaptado deRodrigues (2011)). . . 10
2.10. Ligamentos (adaptado deRodrigues (2011)). . . 11
2.11. Fixação Percutânea com Mínima Invasão (Boccaccio et al.,2012). . . 14
2.12. Barra A B (adapatado de (Khurmi and Gupta,2005)) . . . 18
2.13. COR Geométrico (adapatado de (Khurmi and Gupta,2005)) . . . 19
2.14. Determinação do Ponto de Rotação Segundo Reuleaux (adapatado de (Reuleaux, 1876)). . . 20
2.15. Esquema do funcionamento de um aparelho de obtenção de imagens raio-X (adap-tado de Dance et al.(2014)). . . 22
2.16. Processo de obtenção de imagens TAC (adaptado deDance et al.(2014)). . . 23
2.17. Deteção do contorno das vértebras (adaptado deChampain et al. (2006)). . . 25
2.18. Montagem das amostras na máquina de ensaios (adaptado de Champain et al. (2006)). . . 26
2.19. Pontos de Referência (adaptado deLafage et al. (2015)). . . 27
2.20. Modelo CAM/CAD de quatro vértebras (adaptado deSchulze et al. (2011)). . . . 28
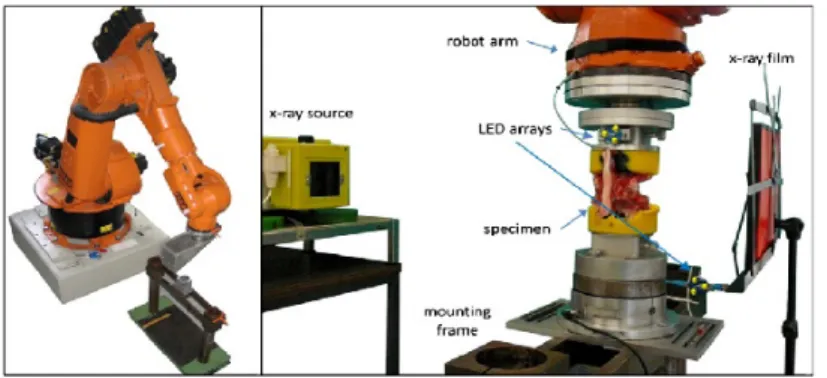
2.21. Seis unidades funcionadas montadas num braço robótico (adaptado de Schulze et al. (2011)). . . 29
3.1. Fluxograma . . . 31
3.2. Seleção dos pontos de referência . . . 37
3.3. Sobreposição das Vértebras (adaptado de (Yue et al.,2008)) . . . 38
3.4. Resultados gráficos (Sem Ruído - Método de (Spiegelman and Woo,1987)) . . . . 45
3.5. Resultados gráficos (Com Ruído - Método de (Spiegelman and Woo,1987)) . . . 46
3.6. Resultados gráficos (Sem Ruído - Método de (Spiegelman and Woo,1987), versão proposta) . . . 48
3.7. Resultados gráficos (Com Ruído - Método de (Spiegelman and Woo,1987), versão proposta) . . . 49
3.8. Determinação do centro de rotação geometricamente . . . 52
3.9. Coordenadas de teste . . . 55
3.10. Dois pontos (Método de (McCane et al.,2005)): (a) Sem Ruído; (b) Com Ruído . 56 3.11. Quatro pontos (Método de (McCane et al.,2005)): (a) Sem Ruído; (b) Com Ruído 57 3.12. Oito pontos (Método de (McCane et al.,2005)): (a) Sem Ruído; (b) Com Ruído . 58 3.13. Resultados do ROM . . . 63
4.1. Uma unidade funcional: (a) extensão; (b) flexão. . . 68
4.2. Centro de rotação para uma unidade funcional. . . 68
4.3. Duas unidades funcionais: (a) extensão; (b) flexão. . . 68
4.4. Centro de rotação para duas unidades funcionais. . . 69
4.5. Centro de rotação para duas unidades funcionais (individualmente). . . 70
4.6. Três unidades funcionais: (a) extensão; (b) flexão. . . 70
4.7. Centro de rotação para três unidades funcionais. . . 71
4.8. Centro de rotação para três unidades funcionais (individualmente). . . 72
4.9. Quatro unidades funcionais: (a) extensão; (b) flexão. . . 72
4.10. Centro de rotação para quatro unidades funcionais. . . 73
4.11. Centro de rotação para quatro unidades funcionais (individualmente). . . 74
4.12. Fase pré-operatória com aumento de contraste: (a) Extensão; (b) Flexão. . . 75
4.13. Centro de rotação da fase pré-operatória. . . 75
4.14. Fase pós-operatória imediatamente a seguir à cirurgia com aumento de contraste: (a) Extensão; (b) Flexão. . . 76
4.15. Centro de rotação da fase pós-operatória imediatamente a seguir à cirurgia. . . . 76
4.16. Fase pós-operatória três meses a seguir à cirurgia com aumento de contraste: (a) Extensão; (b) Flexão. . . 77
4.17. Centro de rotação da fase pós-operatória três meses a seguir à cirurgia. . . 78
4.18. Fase pré-operatória: (a) VisualVertebra; (b) SpineViewr. . . 79
4.19. Fase pós-operatória imediatamente a seguir à cirurgia: (a) VisualVertebra; (b) SpineViewr. . . 79
3.4. Resultados Obtidos (Sem Ruído - Método de (Spiegelman and Woo,1987), versão
proposta) . . . 47
3.5. Resultados Obtidos (Com Ruído - Método de (Spiegelman and Woo,1987), versão proposta) . . . 48
3.6. Dois pontos (Método de (McCane et al.,2005)) . . . 55
3.7. Quatro pontos (Método de (McCane et al.,2005)) . . . 56
3.8. Oito pontos (Método de (McCane et al.,2005)) . . . 57
4.1. Amplitude de movimento para uma unidade funcional. . . 67
4.2. Amplitude de movimento para duas unidades funcionais. . . 69
4.3. Amplitude de movimento para duas unidades funcionais (individualmente). . . . 69
4.4. Amplitude de movimento para três unidades funcionais. . . 71
4.5. Amplitude de movimento para três unidades funcionais (individualmente). . . 71
4.6. Amplitude de movimento para quatro unidades funcionais. . . 72
4.7. Amplitude de movimento para quatro unidades funcionais (individualmente). . . 73
4.8. Amplitude de movimento da fase pré-operatória. . . 75
4.9. Amplitude de movimento da fase pós-operatória imediatamente a seguir à cirurgia. 76 4.10. Amplitude de movimento da fase pós-operatória três meses a seguir à cirurgia. . . 77
ϕ Diferença dos dois ângulos nos dois instantes de tempo ∆v Diferença dos vetores de posição da origem do referencial
local v nos dois instantes de tempo Símbolos Latinos
Pxi, Pyi, Pzi Ângulos de projeção do ROM
A Ponto inicial da reta AB B Ponto final da reta AB
A1 Ponto inicial da reta AB após o movimento
B1 Ponto final da reta AB após o movimento
I Interseção das mediatrizes dos segmentos de reta AA1 e BB1
~
n Vetor de direção do eixo helicoidal de movimento t Translação ao longo do eixo helicoidal de movimento x Coordenadas dos pontos no referencial global antes da
rota-ção
x0 Coordenadas dos pontos no referencial global após a rotação B, R Matriz de rotação
C Origem do referencial local
X Coordenadas dos pontos no referencial local antes da rotação X0 Coordenadas dos pontos no referencial local após da rotação X1 Coordenada segundo x do primeiro ponto do corpo antes a
rotação
Y1 Coordenada segundo y do primeiro ponto do corpo antes a
rotação
X2 Coordenada segundo x do primeiro ponto do corpo após a
rotação
(continuação)
Símbolo Descrição
Y2 Coordenada segundo y do primeiro ponto do corpo após a
rotação
X3 Coordenada segundo x do segundo ponto do corpo antes a
rotação
Y3 Coordenada segundo y do segundo ponto do corpo antes a
rotação
X4 Coordenada segundo x do segundo ponto do corpo após a
rotação
Y4 Coordenada segundo y do segundo ponto do corpo após a
rotação
Cx, xc Coordenada segundo x do centro de rotação
Cy, yc Coordenada segundo y do centro de rotação
xc1 Coordenada segundo x do centro de rotação utilizando o vetor (X1; Y1)(X2; Y2)
yc1 Coordenada segundo y do centro de rotação utilizando o ve-tor (X1; Y1)(X2; Y2)
xc2 Coordenada segundo x do centro de rotação utilizando o vetor (X3; Y3)(X4; Y4)
yc2 Coordenada segundo y do centro de rotação utilizando o ve-tor (X3; Y3)(X4; Y4)
y(t)i Posição do ponto i no referencial global
x(t)i Posição do ponto i no referencial local
v(t) Posição da origem do referencial local relativamente ao refe-rencial global
¯
x Média dos pontos no referencial local ¯
y Média dos pontos no referencial global FCR Vetor das coordenadas do centro de rotação
p Média dos vetores de posição da origem do referencial local v nos dois instantes de tempo
pi Coordenadas do marcador i
tj Instante j
F Matriz dos pontos de referência da flexão E Matriz dos pontos de referência da extensão
e Exponencial
a Complexo que representa etθ E∗ Matriz pseudo-inversa de E
COR Center of Rotation
ICR Instantaneous Center of Rotation HAM Helical Axis of Motion
TAC Tomografia Axial Computorizada CAM/CAD Computer Assisted Modelling/Design
Uma das estruturas da coluna vertebral mais passíveis de desenvolver problemas são os dis-cos intervertebrais. Estes elementos são responsáveis por conferir mobilidade à coluna. Quando estas estruturas são danificadas, verifica-se que o sujeito sofre perda de amplitude de movimento, tornando necessária a intervenção de especialistas, recorrendo-se à cirurgia para a melhoria da qualidade de vida. Existem duas formas de intervenção cirúrgicas muito utilizadas que permitem ao paciente obter parte da mobilidade perdida e, consequentemente, aliviar as dores provocadas pela sua situação clínica. A primeira, chamada artrodese, consiste na fusão das vértebras adja-centes ao disco danificado, e embora remova os sintomas, não restaura a mobilidade perdida. Em contrapartida, existe a artroplastia, que consiste na substituição do disco intervertebral por uma prótese. Esta última técnica cirúrgica alivia os sintomas e, além disso, pretende restaurar parte da mobilidade da coluna, tendo sido provada como um método de tratamento mais eficiente em alternativa à artrodese.
O advento da imagiologia tem vindo gradualmente a alterar a forma como é feito o diag-nóstico e seguimento clínico do paciente. A recolha de imagens médicas, como o raio X, aplicado a exames clínicos bem definidos, tem vindo a assistir o médico no diagnóstico e tratamento de doenças da coluna vertebral. Atualmente existem no mercado ferramentas que permitem anali-sar e quantificar o estado da coluna sem necessidade de cirurgia aberta, recorrendo a métodos baseado em imagem. Estas soluções são eventualmente eficazes, mas têm alguns inconvenientes. Por um lado, são ferramentas proprietárias geralmente de custo elevado. Por outro lado, o utili-zador não tem acesso a uma boa parte dos parâmetros internos que governam os algoritmos de processamento ao longo da cadeia de medida.
Pretendeu-se neste trabalho desenvolver um código de processamento de imagem baseado em algoritmos cinemáticos do movimento biomecânico da coluna. Esta ferramenta pretende ser
um passo no desenvolvimento de um programa de avaliação expedito para as patologias associadas à coluna vertebral, quer no diagnóstico quer no seguimento clínico do paciente, baseado em imagens de raio X e exames clínicos.
Para o efeito, este estudo está dividido em cinco capítulos, onde são demonstrados de uma forma geral alguns dos progressos científicos alcançados nesta área, o trabalho realizado para a criação desta ferramenta e um teste do programa desenvolvido através de um caso de estudo. Para além deste capítulo de introdução, o segundo capítulo está organizado de forma a introduzir o leitor na área em questão, começando pela morfologia da coluna e das suas estruturas mais importantes, seguindo para as patologias associadas, sendo dado um especial foco às patologias referentes aos discos intervertebrais. É feita uma descrição das duas formas de tratamento cirúrgico mais utilizadas, analisando as vantagens e desvantagens de cada uma delas, de modo a realizar uma comparação entre estes métodos. De seguida, é dada ao leitor uma introdução à biomecânica da coluna, para se demonstrar quais os parâmetros mecânicos associados à avaliação cinemática da mesma, de modo a avaliar o estado da coluna e eventuais patologias associadas. Por fim, entra-se no processamento de imagem e nas ferramentas utilizadas para esse fim, explicitando algumas das formas como estas imagens podem ser obtidas.
O terceiro capítulo demonstra todo o trabalho desenvolvido na criação do software de ava-liação da coluna, ao qual foi atribuído o nome de VisualVertebra. Nesta secção descreve-se ao pormenor o funcionamento de cada componente do programa e de que forma estão atribuídas as variáveis deste. No que aos algoritmos para a determinação do centro de rotação diz respeito, são apresentadas várias hipóteses, sugeridas por vários autores, incluindo uma descrição deta-lhada dos cálculos realizados para a obtenção dos algoritmos finais. São apresentados também dois exemplos, nos quais se aplica cada algoritmo numa situação ideal e numa situação onde é introduzido ruído, de modo a demonstrar a robustez de cada um.
O quarto capítulo corresponde à obtenção de resultados por parte do programa, onde se testa, numa fase inicial, a certitude para a determinação do centro e rotação de um segmento funcional até n segmentos. Na segunda parte deste capítulo, o programa é posto à prova num caso real, onde se verifica a evolução do paciente desde o estágio de pré-operatório, pós-operatório e por fim durante um instante da recuperação. Por fim, o último capítulo corresponde às conclusões deste estudo, onde se ressaltam os principais aspetos do programa elaborado e os passos futuros no seu desenvolvimento.
De uma forma geral, neste capítulo descreve-se como é constituída a estrutura da coluna vertebral, quais as suas patologias e as formas atuais de tratamento cirúrgico. Por outro lado, são revistos os modelos biomecânicos que descrevem o movimento da estrutura da coluna.
Na última parte deste capítulo, são abordados os métodos de imagiologia mais usados para o tratamento da coluna vertebral e de que forma podem ser obtidos os parâmetros cinemáticos dos modelos biomecânicos necessários para os algoritmos de análise.
2.2. Estrutura da coluna vertebral
A coluna vertebral é uma complexa estrutura mecânica composta por alavancas (vértebras), pivôs (faces de contacto e discos intervertebrais), ligações (ligamentos) e atuadores (músculos) (Kowalski et al.,2005). Funciona como uma vara forte e flexível com elementos que se movem para frente, para trás, para os lados e que rodam. A coluna contém e protege a espinal medula, suporta a cabeça e serve como suporte para as costelas, cintura pélvica e para os músculos das costas e dos membros superiores (Tortora and Nielsen,2012).
2.2.1. Morfologia
A coluna vertebral é composta por um total de 33 vértebras, sete das quais estão fundidas na região sacral e no cóccix (Tortora and Nielsen,2012). Nas fases iniciais do desenvolvimento do corpo humano, estas 33 vértebras são independentes umas das outras, o que significa que a coluna de um corpo infantil é diferente da de um corpo adulto (Tortora and Nielsen,2012). Este, por sua vez, apresenta 26 vértebras independentes umas das outras, que estão distribuídas da seguinte forma (Tortora and Nielsen,2012;Natour,2004):
Coluna Cervical: é composta por 7 vértebras e constitui o esqueleto axial do pescoço e suporte da cabeça.
Coluna Dorsal: é composta por 12 vértebras que estão localizadas na parte posterior da caixa torácica, suportando-a.
Coluna Lombar: é composta por 5 vértebras que se localizam e suportam a parte inferior das costas. Suporta, também, a cavidade abdominal e permite que haja mobilidade entre a parte dorsal e a pelve.
Sacro: é composto por 5 vértebras sacrais fundidas e une a coluna vertebral à cintura pélvica.
Cóccix: é composto por 4 vértebras fundidas, e apresenta este nome pois a sua forma assemelha-se ao bico de um cuco.
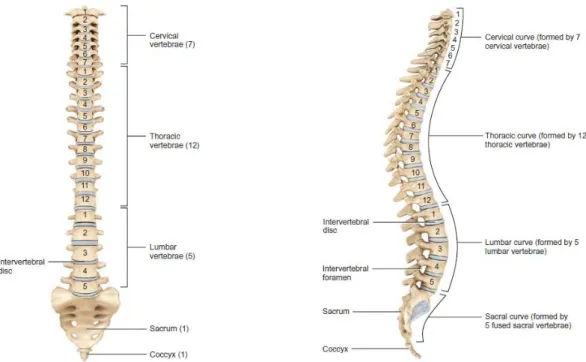
2.2.1.1. Curvas Normais da Coluna Vertebral
A coluna vertebral aparenta ser direita, quando vista da posição anterior ou posterior, como representado na figura 2.1 (a). Contudo, como ilustrado na figura 2.1 (b), quando vista de lado apresenta quatro curvas ligeiras chamadas curvas normais ou sagitais. Relativamente à parte da frente do corpo, as curvas cervicais e lombares são convexas, enquanto que as curvas dorsais e sacrais são côncavas. As curvas aumentam a estabilidade da coluna, ajudam a manter o balanço na posição ereta, absorvem os choques durante a caminhada e ajudam a proteger as vértebras de fraturas (Tortora and Nielsen,2012).
2.2.1.2. Vértebras
As vértebras da coluna vertebral humana são todas diferentes e a morfologia delas mudam em cada região da coluna, mas a sua estrutura em geral é semelhante, pois apresentam os mesmos elementos estruturais.
Corpo Vertebral:
Este tem tendência a aumentar a largura, profundidade e altura à medida que se desce na coluna vertebral. Isto está relacionado com o facto de ser necessário uma maior resistência à carga axial. A única exceção verifica-se na altura da C6 ser menor do que a da C5 e C7 e as alturas dorsais diminuírem abaixo da L2. Embora hajam algumas variações, a forma do corpo vertebral é a de um cilindro composto por osso esponjoso, sendo as
Figura 2.1.: Curvas Normais da Coluna Vertebral: (a) Vista Posterior; (b) Vista Lateral (adap-tado de Tortora and Nielsen(2012)).
bordas das superfícies superior e inferior compostas por osso compacto (Natour, 2004). Notavelmente, o aspeto dorsal é ligeiramente côncavo onde forma o aspeto ventral do canal espinal (Kowalski et al.,2005).
Faces de Contacto:
São ligações apófitais que consistem em cápsulas folgadas e um revestimento sinovial. As faces da coluna cervical adotam uma orientação coronal em relação ao eixo de rotação ins-tantâneo (IAR - Instantaneous Axis of Rotation). O resultado é um alto grau de mobilidade seguido de uma capacidade diminuída para resistir à flexão, extensão, flexão lateral e rota-ção, enquanto que as faces da coluna dorsal adotam uma posição intermédia em relação às faces cervicais orientadas coronalmente que passam para as faces sagitalmente orientadas na coluna lombar. Isto resulta numa resistência mínima à flexão ou translação na coluna lombar, apresentando no entanto uma resistência substancial à rotação (Kowalski et al.,
2005).
Lâmina e Canal Espinal:
A lâmina funciona como base para o processo espinal. As forças podem ser aplicadas para produzir movimento através da musculatura paraespinal, devido à sua ligação ao processo espinal. As dimensões do canal espinal variam de região para região, resultando num maior espaço extramedular da coluna dorsal superior (Kowalski et al.,2005).
Figura 2.2.: Vértebra Típica (adaptado de Tortora and Nielsen(2012)).
Pedículo:
Na coluna cervical os pedículos são mais curtos e têm um diâmetro proporcionalmente maior do que na restante da coluna. Para além da diminuição na coluna dorsal superior, a largura do pedículo transverso aumenta à medida que se desce na coluna (Kowalski et al.,
2005).
Processo Transverso:
Funciona como ligação para a musculatura paraespinal. Por causa da sua projeção e orientação, permite alavancamento para o movimento lateral. São muitas vezes locais de fratura devido a trauma por causa do seu tamanho relativamente reduzido e da quantidade de carregamentos aplicados nesta região (Kowalski et al.,2005).
Processo Espinal:
São usualmente direcionados dorsalmente e caudalmente, sendo bífidos da C3 à C6. O processo espinal da coluna cervical e da coluna média dorsal tende a projetar-se de uma forma mais caudal (Kowalski et al.,2005).
Os elementos de uma vértebra típica podem ser observados na figura2.2. Como foi refe-rido anteriormente, a estrutura anatómica das vértebras varia de região para região da coluna vertebral, como tal, é necessário olhar para as suas diferenças. Estes consistem em (Natour,
2004):
Vértebras cervicais:
Atlas é a primeira vértebra da coluna cervical (C1), sendo a vértebra sobre a qual o crânio repousa. Não apresenta qualquer tipo de corpo vertebral , consistindo apenas em duas massas laterais conectadas por um arco anterior curto e um arco posterior longo (figura 2.3).
Figura 2.3.: Vértebra C1 (Atlas) (adaptado de Tortora and Nielsen(2012)).
Figura 2.4.: Vértebra C2 (Áxis) (adaptado deTortora and Nielsen(2012)).
Áxis é a segunda vértebra cervical (C2), e recebe esse nome pois forma um pivô em torno do qual o atlas, juntamente com o crânio, giram (figura 2.4).
Terceira a sexta vértebra cada uma apresenta um aspeto semelhante, que consiste num corpo vertebral pequeno e largo, um grande foramen vertebral triangular e um processo espinoso curto e bífido (figura2.5).
Sétima Vértebra é conhecida como vértebra proeminente, pois possui um processo espinoso longo, que se torna visível na anatomia de superfície, especialmente com o pescoço flexionado.
Vértebras Dorsais:
Primeira vértebra dorsal assemelha-se a uma vértebra cervical.
Segunda a décima primeira vértebras dorsais são vértebras típicas que possuem um foramen vertebral circular e um processo espinoso longo e delgado. A principal característica anatómica é a presença de faces de contacto costais superiores e inferiores para o encaixe das costelas correspondentes (figura 2.2).
Décima segunda vértebra dorsal é uma vértebra de transição que possui faces de contacto costais, tal como as restantes vértebras dorsais, e processos transversos e espinosos
Figura 2.5.: Vértebra Cervical (adaptado de Tortora and Nielsen (2012)).
Figura 2.6.: Vértebra Lombar (adaptado deTortora and Nielsen (2012)).
semelhantes às vértebras lombares.
Vértebras Lombares:
Diferenças entre as vértebras dorsais distinguem-se as vértebras lombares das dorsais pelo seu grande tamanho, pela ausência de faces de contacto costais para a acomodação de costelas e dos foramens transversais. Apresentam também processos transversais finos e processos espinosos quadriláteros.
Características comuns apresentam corpos grandes e com uma forma semelhante à dos rins, foramens vertebrais triangulares, pedículos e lâminas curtas e espessas (figura2.6).
Sacro:
Constituição Geral, como referido anteriormente, é constituído por cinco vértebras sacrais que se fundem na fase adulta, formando assim um osso em forma de cunha (figura2.7). A sua articulação é feita superiormente com a quinta vértebra lombar e lateralmente com os ossos do quadril.
Face pelvina é côncava e lisa, possui quatro pares de foramens sacrais pelvinos de onde saem os ramos ventrais dos primeiros nervos sacrais e os seus vasos sanguíneos. Face dorsal ao contrário da face pelvina, é rugosa e convexa. As espinhas dorsais das
Figura 2.7.: Sacro (adaptado deTortora and Nielsen (2012)).
vértebras sacrais formam a crista sacral mediana. A fusão dos processos articulares forma as cristas sacrais intermediárias, possuindo, também, quatro pares de foraminas sacrais dorsais. Articula-se inferiormente nos cornos sacrais com os cornos coccígeos, como se pode observar na figura 2.7.
Parte lateral ou massa sacral é formada pela fusão dos processos transversos, originando assim a crista sacral lateral. A parte superior apresenta uma superfície em forma de orelha (superfície auricular) que articula com o ílio.
A base apresenta o promontório, que corresponde à borda anterior da superfície anterior da primeira vértebra sacral e o canal sacral que contém o saco dural, a parte inferior da cauda equina e o filamento terminal. Apresenta também processos articulares de forma a poder haver articulação com a quinta vértebra lombar.
Cóccix:
Tal como o sacro, apresenta uma forma de cunha, base, ápice, faces dorsal e pelvina e bordas laterais. Pode consistir em cinco, quatro ou três vértebras, em que a primeira possui dois cornos de forma a articular com os cornos sacrais (figura 2.8).
2.2.1.3. Discos Intervertebrais
Os discos intervertebrais são estruturas que se encontram entre vértebras adjacentes (Oktay et al.,2014) (à exceção das vértebras C1 e C2 (Rodrigues,2011)), e absorvem os choques e tensões criadas pelo movimento, impedindo a fricção entre as vértebras (Oktay et al.,2014). Os discos estão posicionados nas superfícies intervertebrais dos corpos vertebrais (Rodrigues, 2011). A
Figura 2.8.: Cóccix (adaptado deTortora and Nielsen(2012)).
Figura 2.9.: Composição do Disco Intervertebral (adaptado de Rodrigues (2011)).
composição dos discos divide-se em duas partes: o núcleo pulposo e as fibras anelares (Oktay et al.,2014), como demonstrado na figura 2.9. Como o próprio nome indica, o núcleo encontra-se no centro do disco, e é composto por uma substância gelatinosa com um centro elástico (Oktay et al.,2014), sendo composto por 88% de água (Rodrigues,2011). As fibras anelares são compostas por uma sucessão de camadas, cujas direções são cruzadas de uma camada para a outra, de forma a ser impermeável a qualquer substância, e de forma a conter o núcleo pulposo (Rodrigues,2011).
Embora a estrutura dos discos intervertebrais seja a mesma em todas as regiões da coluna, estes apresentam diferentes características nas diferentes regiões, que vão afetar a morfologia da coluna (Natour,2004):
(i) Representam um quarto do comprimento total da coluna vertebral;
(ii) São mais finos na região dorsal e mais espessos na região lombar;
(iii) Tanto os discos cervicais como os lombares são mais espessos na parte anterior do que na posterior, contribuindo, assim, para a formação das curvas normais.
2.2.1.4. Ligamentos
Os ligamentos espinais têm a função de estabilizar e controlar os movimentos da coluna (Rodrigues,2011), e a força dos vários ligamentos varia de de região para região (Kowalski et al.,
Figura 2.10.: Ligamentos (adaptado de Rodrigues (2011)).
2005). A determinação da região dos ligamentos é feita conforme a função e posição dos mesmos, e estão divididas em seis regiões (Rodrigues,2011):
(i) Ligamentos Longitudinais Anteriores – localizados nas faces de contacto anteriores dos corpos vertebrais;
(ii) Ligamentos Longitudinais Posteriores – localizados nas faces de contacto posteriores dos corpos vertebrais;
(iii) Ligamentum Flavum – une a lâmina de uma vértebra à da vértebra adjacente;
(iv) Ligamentos Capsulares – unem a superfície articulada inferior da vértebra à superfície articulada superior da vértebra diretamente abaixo
(v) Ligamentos Interespinosos – une o processo espinal de duas vértebras;
(vi) Ligamentos Supraespinais – estão localizados nas superfícies posteriores do processo espinal das vértebras.
Na figura 2.10é possível observar os ligamentos na coluna cervical.
2.2.1.5. Músculos
Os músculos desempenham o papel de atuadores que são responsáveis por gerar movimentos na coluna. Os músculos estão ligados às vértebras através de tendões, que, tal como os ligamentos, são feitos de tecido fibroso (Rodrigues, 2011). Os músculos da coluna podem ser divididos em várias categorias, tais como os músculos eretores, que contribuem para a extensão e flexão lateral, os músculos psoas, que causam flexão e os músculos retos abdominais, que são indiretamente responsáveis pela flexão da coluna (Kowalski et al.,2005).
2.2.2. Patologias
As razões que levam uma pessoa a necessitar de tratamento na coluna vertebral podem ser divididas em três grandes grupos:
1. Acidentes (em que a coluna sofre danos físicos, tais como fraturas e rompimentos das suas estruturas.)
2. Doenças (em que o paciente sofre de doenças que afetam a coluna, e impedem que esta apresente uma estrutura saudável que permita uma ótima qualidade de vida. Muitas destas doenças são genéticas e degenerativas.)
3. Disfunções nervosas (em que os danos no disco intervertebral vão afetar o sistema nervoso, podendo por vezes causar dores ou até danos permanentes (Hammer et al.,2015).
Aqui vão ser referidas e explicadas de uma forma muito breve algumas patologias que afetam o disco intervertebral, pois são as que necessitam, em muitos casos, de intervenção ci-rúrgica, com uma possível necessidade de substituição do disco intervertebral pela prótese discal (Hammer et al.,2015;Oktay et al.,2014;Kumar and Taylor,2014):
Acidentes:
(i) Disco Intervertebral Herniado. (ii) Espondilolistese.
(iii) Espondilose.
(iv) Lesões Cervicais (Whiplash Injury).
Doenças:
(i) Doença Degenerativa do Disco Intervertebral. (ii) Tumores.
(iii) Inflamatórias: Artrite Reumatoide (iv) Condições Metabólicas.
(v) Patologia do Plexo Braquial. (vi) Patologia Muscular.
Disfunções nervosas:
anelar, migram através da protusão anelar1 e é chamada herniação. A herniação também é classificada em subcategorias como protusão e extrusão (Oktay et al.,2014).
O nível mais comum para a ocorrência da herniação sintomática na coluna cervical, é no disco entre as vértebras C6-C7 que resulta na compressão da raiz da vértebra C7. Os sintomas mais comuns envolvem dor na zona superior e posterior do braço, fraqueza no tríceps e no pulso e também formigueiro na ponta do dedo médio.
As segundas raízes mais afetadas são as C6 e C8, devido a doença no disco das vértebras C5-C6 e no disco C7-toráxico (T), respetivamente (Hammer et al.,2015).
2.2.2.2. Doença degenerativa do disco intervertebral
A desidratação (drenagem da água no disco intervertebral), fibrose, estreitamento do espaço do disco, inchaço difusivo do anel atrás do espaço do disco, e fissuras extensas, são tipos de degeneração. A degeneração pode ocorrer devido à idade, trauma e lágrimas anelares (Oktay et al.,2014).
2.2.2.3. Mielopatia cervical
Mielopatia cervical é uma doença que envolve a compressão do canal da espinal de medula, que resulta em complicações neurológicas. A obstrução do canal pode ser provocada por vários fatores, incluindo: mudanças devido à degeneração dos discos intervertebrais, hipertrofia do ligamento flavum, ou formação de osteófitos devido aos processos degenerativos que ocorrem ao nível do disco intervertebral. A mielopatia cervical está registada como a forma mais comum de disfunções da espinal medula em indivíduos com idade superior a 55 anos, afetando 90% dos indivíduos à medida que se aproximam dos setenta anos de idade. Os sintomas mais comuns incluem perturbações sensoriais das mãos, distúrbios de marcha ou balanço instável, força motora diminuída com cansaço muscular nas extremidades superiores associado, bem como perturbações da bexiga e dos intestinos (Dennison and Leal,2011).
Figura 2.11.: Fixação Percutânea com Mínima Invasão (Boccaccio et al.,2012).
2.2.3. Tratamentos cirúrgicos
Existem várias opções cirúrgicas para o tratamento destas complicações médicas.Na sua maioria, são do tipo invasivo, em que o paciente tem de ser submetido a anestesia e as suas vér-tebras têm de ser expostas, para se poder proceder ao seu tratamento. Aqui vão ser comparados dois métodos: a artrodese e a artroplastia, pois são os mais utilizados.
2.2.3.1. Artrodese
Existem alguns métodos para a realização da artrodese, mas todos assentam no princípio da remoção do disco intervertebral danificado e proceder à união das vértebras adjacentes.
Um dos métodos de artrodese é a fixação aparafusada do pedículo. Este método tem aumentado o sucesso das taxas de fusão, tornando-se um método popular para a artrodese pos-terior. Mas embora apresente estas vantagens, não elimina a degeneração do segmento adjacente (ASD - Adjacent Segment Degeneration) (Kim et al.,2010).
Existem tratamentos conservativos, já comprovados por alguns estudos, que são eficazes no tratamento de algumas fraturas da coluna, como por exemplo descanso na cama. Mas estes provaram também ser ineficazes no tratamento de outros traumas da coluna, para além de que os tratamentos conservativos expõem os pacientes a maiores riscos de deformidades da coluna (Boccaccio et al.,2012).
O tratamento de deformidades com cirurgia aberta apresenta um maior risco devido a possíveis complicações, tais como perda de sangue excessiva e problemas ligados à anestesia. Como tal, foi proposto um novo de método de artrodese, a Fixação Percutânea com Mínima Invasão (MIPF - Minimally Invasive Percutaneous Fixation), cuja solução é a observada na figura2.11 (Boccaccio et al.,2012).
Secure-C 6 Replica uma Rótula Esférica
BRYAN 6 Replica uma Rótula Esférica em Ambos os Lados
Em termos de tratamentos em vários níveis, a artrodese inclui o método da corpectomia, que consiste numa estrutura única de enxerto ósseo (podendo também ser de titânio, entre outros), provavelmente resultado de duas placas de interface de enxerto. Mas como a corpetomia tem um maior braço de alavanca, resulta em maiores momentos e como consequência, as tensões resultantes nas vértebras são maiores, o que aumenta o risco de fractura (Hussain et al.,2012).
2.2.3.2. Artroplastia
Tal como a artrodese, a artroplastia consiste na remoção do disco intervertebral danificado, mas ao contrário da primeira, em vez de unir as vértebras adjacentes, substitui o disco por uma prótese discal, de forma a não retirar por completo a qualidade e quantidade de movimento e a não causar concentrações de tensões nas vértebras adjacentes, prevenindo degeneração precoce (Galbusera et al.,2008).
Como tal, a artroplastia tem provado ser uma opção mais eficaz no tratamento de lesões na coluna vertebral, o que é confirmado pelo facto de ser um método cada vez mais utilizado pelos cirurgiões (Galbusera et al.,2006).
No que toca à escolha de dispositivos, existem várias alternativas, sendo pertinente fazer uma comparação entre alguns dos dispositivos.
A tabela 2.1apresenta alguns dos dispositivos e as suas características.
Como se pode observar pela tabela 2.1 as próteses têm características idênticas, mas o design e os materiais utilizados mudam.
2.3. Biomecânica da coluna vertebral
Do ponto de vista da mecânica, a coluna vertebral comporta-se como uma viga em balanço, que suporta cargas estáveis e com movimento (Natour,2004). Assim sendo, existem movimentos básicos que pode realizar sem qualquer risco, tal como demonstrado na tabela2.2.
Tabela 2.2.: Movimentos básicos da coluna vertebral (Natour,2004).
A sua estabilidade é garantida, principalmente, pelas ligações zigoapofisárias, pelos liga-mentos e pela ação da musculatura. A estabilidade vertebral depende, portanto, dos fatores que fazem contraposição às cargas recebidas (Natour,2004).
2.3.1. Forças atuantes
A coluna vertebral está sujeita a forças de tração e compressão, sendo a sua distribuição dada da seguinte forma: o corpo vertebral recebe as cargas de compressão, sendo a lâmina responsável por suportar cargas de tração, cujo auxílio é dado pelos músculos e pelos ligamentos paravertebrais (Natour,2004).
(ii) Centro de Rotação (COR - Center of Rotation);
(iii) Centro Instantâneo de Rotação (ICR - Instantaneous Center of Rotation);
(iv) Eixo Helicoidal de Movimento (HAM - Helical Axis of Motion).
De uma forma geral a cinemática da coluna vertebral é feita através da análise de radio-grafias laterais estáticas, que são retiradas quando se realiza em posições de extensão e flexão máxima (tabela 2.2). O parâmetro ROM é obtido através da análise dessas imagens, mas esse parâmetro varia de sujeito para sujeito (Anderst et al.,2013).
Como alternativa a este parâmetro e de forma a obter resultados mais fiáveis foi proposto o ICR, avaliando assim a qualidade de movimento e identificando anormalidades na cinemática da coluna (Anderst et al.,2013).
2.3.2.1. Amplitude de Movimento
A amplitude de movimento (ROM) é o parâmetro que determina a amplitude total de um segmento móvel da coluna vertebral.
A medição do ROM tem sido utilizado para avaliar a severidade de danos ou doenças relacionadas com a coluna cervical, e é um fator usado para classificar as patologias, bem como a eficácia dos programas de reabilitação (Anderst et al.,2015).
Na medição do ROM é necessário ter em conta os parâmetros que o vão influenciar (Anderst et al.,2015):
1. Complexidade da rótula;
2. Posição neutra, meios ciclos ou movimentos completos no plano;
3. Efeito de estabilização;
4. Posição inicial;
5. Movimentos ativos ou passivos;
7. Efeito da direção;
8. Aquecimento;
9. Variação diurna.
A medição do ROM é normalmente processada da mesma forma em todos os estudos, em que os pacientes realizam uma série de movimentos de extensão e flexão, e imagens raio-X são obtidas quando os pacientes se encontram na posição neutra, em flexão total e extensão total, e a partir destas imagens são retirados os ângulos máximos.
O ROM também pode ser medido durante os testes dinâmicos em que se utilizam os ângulos de projeção (Pxi, Pyi, Pzi). O máximo ROM de cada segmento móvel é determinado
pelas rotações intervertebrais mais positivas e mais negativas. O mesmo método é utilizado para a determinação do ROM da cabeça ao tronco. O ROM relativamente à orientação estática é dividido em ROM positivo (flexão, inclinação à direita e rotação axial à esquerda) e em ROM negativo (extensão, inclinação à esquerda e rotação axial à direita) (Anderst et al.,2015).
2.3.2.2. Centro de Rotação
Quando um corpo apresenta movimento de tal forma que cada um dos seus pontos per-manece a uma distância constante de um ponto fixo, é dito que roda em torno desse ponto (Reuleaux,1876), apresentando um centro de rotação.
Segundo (Martin,1982), qualquer ligação que tenha movimento no plano pode ser conside-rado como uma rotação num instante sobre um ponto (cuja velocidade é igual a zero (Spiegelman and Woo,1987)) no plano de movimento, sendo esse mesmo ponto o centro de rotação da ligação, podendo ou não localizar-se dentro da própria ligação.
O COR entre dois pontos (A e B) de uma barra (figura2.12) pode ser encontrado geome-tricamente.
Figura 2.13.: COR Geométrico (adapatado de (Khurmi and Gupta,2005))
Sabendo que os pontos A e B se movimentam para A1 e B1 respetivamente e dotados de rotação, traçando dois segmentos de reta AA1 e BB1, a interseção (I) das mediatriz de ambos
os segmentos de reta (figura2.13) representa o COR da barra AB (Khurmi and Gupta,2005). A rotação de uma vértebra pode ser definida como a rotação sobre um eixo que se encontra perpendicular a um plano sobre o qual ocorre (Sears et al.,2006).
Os COR dos segmentos intervertebrais são muito importantes para a determinação dos parâmetros cinemáticos da coluna vertebral (Liu et al., 2016), e tem sido utilizado como uma medida padrão para avaliar as condições normais, patológicas e cirurgicamente alteradas nas unidades de movimentos da coluna (Kelly et al.,2013).
Este parâmetro é também importante para o desenvolvimento das próteses interdiscais e para definir as posições cirúrgicas destes dispositivos nos pacientes, por forma a reproduzir fisiologicamente os movimentos dos segmentos danificados (Liu et al.,2016).
Para a determinação do COR são usualmente utilizados métodos de processamento de imagem, mas devido a pequenas incertezas causadas por ruídos de sinal, resolução e localização de pontos de referência, existem erros de avaliação (Kelly et al.,2013).
Outros métodos de determinação do COR têm sido baseados na deteção de características de radiografias no plano de sujeitos a realizar determinados movimentos (Kelly et al.,2013).
2.3.2.3. Centro Instantâneo de Rotação
Em certos casos, os centros de rotação são estacionários, enquanto que noutros casos este desloca-se, denotando-se como centro instantâneo de rotação que representa o centro de rotação num determinado instante. Um centro instantâneo de rotação é definido como (Martin,1982):
Figura 2.14.: Determinação do Ponto de Rotação Segundo Reuleaux (adapatado de (Reuleaux,
1876)).
instante;
2. Um ponto comum a dois corpos que apresentam a mesma velocidade linear tanto na direção como em magnitude.
Regra geral, todos os modelos registam o movimento da coluna (in vivo) com intervalos de tempo regulares, de forma a obter uma medição precisa dos ângulos gerados pela coluna durante o movimento. A determinação do ICR através do método dos elementos finitos vai incidir sobre a distribuição das forças nas pequenas faces de articulação. Hipoteticamente, as faces estariam sobre carregamento máximo quando o ICR se localizasse fora do disco intervertebral, enquanto que quando as faces estivessem livres de qualquer carregamento o ICR estaria localizado no interior do disco (Schmidt et al.,2008).
Para confirmar estes resultados, é realizada uma comparação utilizando o método de Reu-leaux, em que dois pontos de referência vão ser colocados na parte superior da vértebra, antes e após o movimento, determinando-se o ponto de interseção das retas perpendiculares a cada segmento de reta (Reuleaux,1876), obtendo-se assim o ICR (figura2.14).
2.3.2.4. Eixo Helicoidal de Movimento
O método mais comum para descrever o movimento de uma rótula é a aproximação dos seis graus de liberdade, que consiste na decomposição dos movimentos em três translações ao longo do eixo cartesiano correspondente, e em três ângulos de rotação à volta dos mesmos (Cescon et al.,2014).
A aproximação do eixo helicoidal de movimento (ou eixo helicoidal finito) define o movi-mento como um ângulo de rotação, Θ, em torno do eixo, descrito por um vetor de direção, ~n, o
2.4. Imagiologia
O tratamento da maioria das doenças da coluna é uma tarefa difícil devido à taxa de complicações imediatas, a médio e longo prazo. O planeamento cirúrgico e acompanhamento clínico dependem dos dados obtidos de imagens raio-X estáticas e dinâmicas, tal como de outro tipo de processamento de imagens (Champain et al.,2006). Com estas imagens é possível retirar os parâmetros fisiológicos necessários à avaliação do estado da coluna para o tratamento das doenças.
A imagiologia é a técnica de exploração médica por meio de imagens. O método mais conhecido de imagiologia é o raio-X, que ficou disponível para uso no início do século XX e logo se mostrou muito útil, pois permitia detetar algumas anomalias que até então só eram detetáveis nas autópsias (Simmons et al.,2003).
No que respeita a técnicas de imagiologia utilizadas para o diagnóstico de anomalias na coluna vertebral, existem três que se destacam: raio-X, TAC (Tomografia Axial Computorizada) e RM (Ressonância Magnética), e torna-se conveniente explicar o método de funcionamento destas técnicas.
2.4.1. Radiografia
O processo de obter radiografias para a avaliação de problemas musculoesqueléticos ficou disponível nos inícios do século XX. Até então, a capacidade de confirmar patologias era apenas possível após a autópsia, o que levou a uma rápida propagação e uso da radiografia (Simmons et al.,2003). No entanto, antes de 1970, apenas estava disponível o método raio-X, com ou sem contraste, como forma de avaliação de pacientes com disfunções a nível da coluna (Herzog et al.,
2003).
A técnica raio-X é a exposição de uma película de filme a radiação do espectro raio-X cujos raios atravessam os tecidos do corpo humano, e a sua passagem é mais ou menos impedida pelos tecidos que contém densos minerais, como o osso, que impede de uma forma mais eficaz
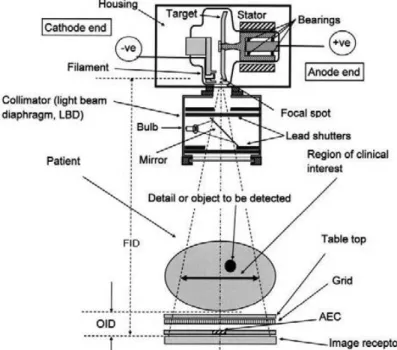
Figura 2.15.: Esquema do funcionamento de um aparelho de obtenção de imagens raio-X (adap-tado de Dance et al.(2014)).
a sua passagem em relação aos tecidos moles. E embora a disposição dos tecidos moles seja, por vezes, avaliada, o seu contorno e qualidade não se encontra bem definido (Simmons et al.,
2003). De forma mais simplificada, a obtenção de imagens raio-X é a colheita de sombras de atenuação que são projetadas de um ponto de origem ideal de raios-X para um recetor. Este aspeto verifica-se para todas as técnicas que utilizem raios-X (Dance et al.,2014). A figura 2.15
mostra um diagrama do funcionamento de um aparelho para a obtenção de radiografias.
Embora seja um método eficaz e económico no diagnóstico de fraturas de compressão nos corpos vertebrais e na avaliação das curvas normais (através de extensão e flexão), nas situações mais graves e complexas mostra-se pouco eficaz. Para a avaliação da estrutura dos elementos ósseos da coluna vertebral, um simples conjunto de duas vistas (lateral e antero-posterior) é suficiente (Patel,2004).
2.4.2. Tomografia Axial Computorizada
Uma das ferramentas mais valiosas para a avaliação de estruturas ósseas da coluna vertebral é a Tomografia Axial Computorizada (TAC) (Patel,2004), que desempenha um papel principal na reconstrução 3D dessas mesma estruturas a partir de segmentação. A obtenção de imagens por segmentação permite a reconstrução, com alta precisão, de volumes anatómicos, como por exemplo as vértebras ou até órgãos de tecidos moles. Isto permite um estudo extensivo da sua morfologia e a deteção de patologias ou anormalidades (Almeida et al.,2016).
campo de visão ligeiramente limitado e uma pobre delineação das estruturas anatómicas e das patologias (Herzog et al.,2003).
A obtenção das várias vistas é feita através da rotação dos tubos de raio-X e de várias colunas de detetores em torno do paciente, sendo que o uso de dezenas ou centenas de colunas de detetores ao longo de um eixo permite uma aquisição rápida das várias seções (Dance et al.,
2014). A figura 2.16demonstra como é realizado este processo.
2.4.3. Ressonância Magnética
A Ressonância Magnética tem a capacidade de fornecer imagens dos tecidos moles em alta definição, tornado-a uma ferramenta preciosa na avaliação de estruturas anatómicas, como os discos intervertebrais (Patel,2004), tornando o processo de identificação de anomalias mais fácil. Embora a ressonância magnética tenha um excelente contraste nos tecidos moles, por vezes é vantajosa a utilização de um agente para aumentar o contraste entre os tecidos (Dance et al.,
2014).
A obtenção de imagens através do método de Ressonância Magnética é feita quando um pulso de ondas rádio com uma determinada frequência induz a transição de uma fração de protões rotativos do corpo para um nível de energia mais elevado. Aquando o término do pulso de ondas rádio, os núcleos excitados regressam ao seu nível de energia inferior libertando energia nesse processo. Através da análise do padrão absorção-libertação da energia é possível criar o conjunto
de imagens. O processo de absorção-libertação é denominado ressonância magnética (Herzog et al.,2003).
A aplicação de um pulso de uma frequência rádio num campo homogéneo leva a que o volume em que se pretende obter a imagem fique excitado, o que dificulta a obtenção de cortes seccionais com espessura reduzida. Mas nesta técnica de imagiologia é relativamente fácil combater esse efeito através da aplicação de um gradiente de campo magnético linear ao longo do volume durante o pulso (Dance et al.,2014).
Como esta técnica não envolve a utilização de radiação ionizante torna-se mais segura do que as duas técnicas previamente descritas (Patel,2004).
2.4.4. Programas de tratamento de imagem médica
A obtenção dos parâmetros necessários é um processo demorado e tedioso, com uma fiabi-lidade e precisão muito variáveis, pois dependem do método utilizado (Champain et al.,2006). Como resultado, foram criados métodos computorizados que permitem a obtenção e uma grande quantidade de parâmetros num curto espaço de tempo, permitindo também padronizar os mé-todos utilizados (Champain et al.,2006).
Em 1999 foi desenvolvido o software SpineView 1.0r que permitia a medição da dinâmica lombar principal e os parâmetros de postura sagital da coluna. A avaliação desta primeira versão do software foi realizada comparando medições diretas em imagens raio-X. Os resultados obtidos demonstraram uma boa fiabilidade dos resultados (Champain et al.,2006).
2.4.4.1. SpineViewr
Uma versão mais recente foi desenvolvida, permitindo obter um maior número de parâme-tros, tais como: parâmetros frontais para o estudo de deformidades espinais; estudo dinâmico da coluna lombar e cervical; e análise de postura sagital. Esta versão também apresentou uma identificação de pontos de referência mais desenvolvida, e a deteção do contorno das vértebras (figura 2.17) (Champain et al.,2006).
Cada análise realizada pelo SpineViewr apresenta quatro etapas (Champain et al.,2006):
1. Identificação dos pontos de referência anatómicos numa imagem raio-X digital;
2. Deteção automática do contorno das vértebras;
3. Validação dos contornos das vértebras após o controlo visual e correção manual;
Figura 2.17.: Deteção do contorno das vértebras (adaptado de Champain et al.(2006)).
Na última etapa são calculados 762 parâmetros, que podem ser divididos em quatro grupos (Champain et al.,2006):
1. Parâmetros Angulares ângulos intervertebrais, inclinação espinal, curvaturas sagitais, incli-nação sagital, curvaturas frontais (ângulos de Cobb), cunhagem vertebral, postura pélvica e parâmetros de postura;
2. Parâmetros Lineares alturas vertebrais e discais, eixo vertebral sagital, verticalidades, pos-tura pélvica e parâmetros de pospos-tura;
3. Índices saliências, deslocamentos, rácio de altura disco/vértebra;
4. Parâmetros relacionados à cinemática vertebral em imagens raio-X dinâmicas amplitude de movimento (ROM), translações vertebrais, centros de rotação (COR)2
2.4.4.2. Validação de programas de processamento de imagem
Para a validação de um software de processamento de imagem é necessário realizar testes de precisão. Estes testes de precisão podem ser feitos obtendo os resultados manualmente e
Figura 2.18.: Montagem das amostras na máquina de ensaios (adaptado de Champain et al.
(2006)).
comparando com os obtidos pelo software, ou comparando-os com os resultados obtidos por um software previamente validado.
Para softwares como o SpineViewr é necessário realizar testes de módulos dinâmicos usando as medidas de referência em espécimes in vitro.
Existem vários tipos de teste de precisão, como tal, é pertinente descrever alguns deles:
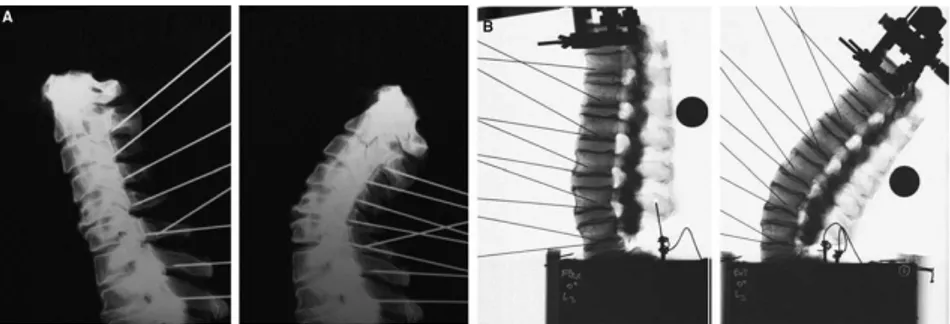
1. Para este teste, é necessário recolher um conjunto de amostras, e cada amostra é sujeita a uma análise radiológica para a deteção de anormalidades ósseas, perda de altura discal e outros sinais de degeneração anormal (Champain et al.,2006).
O conjunto de vértebras é montado na máquina que vai realizar testes de flexão e extensão, através de um conjunto de pinos que são fixados nos corpos vertebrais e ligados a cabos de fixação, tal como demonstrado na figura 2.18(Champain et al.,2006).
São obtidas imagens dinâmicas em vários ângulos, com foco numa vértebra. São obtidos os ROM das vértebras (exceto para as que foram fixas rigidamente) utilizando os pinos de fixação.
Por fim, é realizada uma análise estatística para a determinação da precisão dos resultados obtidos pelo software (Champain et al.,2006).
2. Este teste foi realizado para a validação do software Surgimapr, que é um programa
especializado na medição de parâmetros pélvico-espinais.
Este teste de precisão usa como valores de referência os valores obtidos pelo software SpineViewr, pois é um programa validado, e é o mais utilizado em projetos de pesquisas, para além de que demonstra grande fiabilidade e precisão (Lafage et al.,2015).
Para a realização da validação é necessário obter um conjunto de imagens em que os pacientes realizam movimentos pré-definidos. Após a obtenção das imagens, é necessário definir os pontos de referência em ambos os softwares (Lafage et al., 2015). A partir
Figura 2.19.: Pontos de Referência (adaptado deLafage et al. (2015)).
deste ponto, ambos os programas calculam os parâmetros. Nesta fase é possível calcular a fiabilidade e a precisão do software:
Precisão: um número de radiografias é selecionado e avaliado com o SpineViewr, de
se-guida foram marcadas com pontos de referência de forma a eliminar erros na avaliação de precisão (figura 2.19). Um conjunto de observadores utiliza o novo software para realizar medições, por duas vezes, nas radiografias, utilizando os pontos de referência providenciados, com um espaço de duas semanas. As medições obtidas pelos dois softwares são depois utilizadas para realizar uma análise estatística (Lafage et al.,
2015).
Fiabilidade: nesta etapa são selecionadas um maior número de radiografias (desta vez sem pontos de referência), em que o mesmo conjunto de observadores, de novo, realizam duas medições, com um espaço de uma semana, em que a identidade dos pacientes é anónima, e a ordem de medição é alterada de uma forma aleatória. As diferenças entre os resultados obtidos nas duas medições são tratadas analiticamente, de forma a determinar o grau de fiabilidade do software (Lafage et al.,2015).
3. Para a validação do software FXAr (este software determina, apenas, o ROM e o COR) foram utilizados dois métodos: utilizando um modelo CAM/CAD e testes in vitro com recurso a um robô.
Figura 2.20.: Modelo CAM/CAD de quatro vértebras (adaptado deSchulze et al.(2011)).
CAM/CAD: foram gerados modelos 3D de quatro vértebras da coluna vertebral (figura
2.20), sendo estas ligadas por pontos limitados de forma a permitir movimento apenas no plano sagital. Os corpos vertebrais foram interligados no espaço intervertebral, de forma a pré-definir o COR para segmento. Após salvar a imagem na posição neutra, foram definidos ângulos de rotação, e as rotações conferidas às vértebras ocorreram em torno dos COR pré-definidos, imagens 2D das rotações foram guardadas e mais tarde introduzidas no software. Após a obtenção dos resultados por parte do software, os seus valores foram comparados com os pré-definidos, e a sua análise estatística foi realizada (Schulze et al.,2011).
In vitro: este teste é muito semelhante ao primeiro teste de precisão acima descrito, em que seis unidades funcionais são montadas num braço robótico (figura 2.21), e são colocadas numa posição neutra; colocam-se também parafusos metálicos em pontos de referência, que mais tarde serão utilizados para definir os pontos no software, são pré-definidos ângulos de rotação em torno de um COR pré-definido, e os seus movimentos finais captados em imagens raio-X. Os movimentos são, adicionalmente, captados por um sistema de mapeamento ótico. As imagens raio-X são depois introduzidas no software e os resultados obtidos comparados aos pré-definidos (Schulze et al.,2011).
2.5. Conclusões
Entender a morfologia e função da coluna vertebral é fundamental para o seu estudo, no-meadamente para intervir de forma eficaz na resolução de patologias. Como se evidenciou neste capítulo, as anomalias associadas aos discos intervertebrais são grandes debilitadoras do movi-mento. Torna-se por isso necessário desenvolver métodos que permitam quantificar as patologias e a sua relação com parâmetros indicadores da amplitude de movimento e qualidade de vida dos pacientes. O estudo da coluna e o desenvolvimento de programas para monitorar os pacientes e
Figura 2.21.: Seis unidades funcionadas montadas num braço robótico (adaptado deSchulze et al.
(2011)).
seus sintomas é essencial, especialmente se combinado com as formas de tratamento existentes para a restauração dos discos intervertebrais, sendo a artroplastia a opção mais eficaz, pois per-mite devolver parte das funcionalidades perdidas, para além de eliminar os sintomas associados à doença.
Para um melhor desenvolvimento dos dispositivos médicos utilizados na artroplastia, é ne-cessário estudar a biomecânica da coluna vertebral. Existem atualmente ferramentas computaci-onais para analisar o estado da coluna baseadas em imagiologia. Programas como o SpineViewr,
Surgimapr, FXAr, entre outros, são de grande importância, pois ajudam os clínicos a perceber o estado atual dos pacientes, e de que forma a patologia evolui antes e após tratamento ou ci-rurgia. Estas soluções são eventualmente eficazes, mas têm alguns inconvenientes. Por um lado, são ferramentas proprietárias geralmente de custo elevado. Por outro lado, o utilizador não tem acesso a uma boa parte dos parâmetros internos que governam os algoritmos de processamento ao longo da cadeia de medida.
3.1. Algoritmo: processamento de imagem e cinemática
A existência de uma ferramenta de análise de dados de imagiologia que auxilie o clínico quer a avaliar a gravidade de uma patologia, quer a quantificar o desenvolvimento de um tratamento ou intervenção cirúrgica ao nível da coluna de um paciente é de grande importância. Atendendo a esta exigência, foi proposto um estudo para o desenvolvimento de um programa que cumpra esse propósito. O código desenvolvido, ao qual foi atribuído o nome de VisualVertebrar, permite ao clínico avaliar o movimento da coluna a partir de um par de imagens, em que o paciente na primeira está em completa flexão da coluna e na segunda em completa extensão. Na sua versão atual, este programa necessita que o clínico introduza as imagens, defina os pontos de referência das vértebras, e posteriormente são gerados e apresentados os resultados de avaliação relevantes para a descrição da biomecânica da coluna específica do paciente.
Na figura 3.1 apresenta-se o fluxograma do programa, onde constam as etapas principais do seu desenvolvimento. Estas etapas são descritas em detalhe no seguimento do capítulo. O código foi escrito em linguagem de programação Python, incluindo o ecossistema de computação científica com módulos como Numpy, Scipy, Matplotlib e Sympy. Para o processamento de imagem existem vários módulos disponíveis em Python, e.g.: PIL, SimpleCV, Mahotas, scipy, PythonMagick, scikit-image, OpenCV-Python. Neste trabalho optou-se por este último.
3.1.1. Leitura das imagens
Para iniciar a análise cinemática da coluna vertebral, é necessário importar primeiro as imagens de extensão e flexão. A título de exemplo, o código escrito inclui as seguintes linhas de execução:
c a m i n h o = ’ C :/ U s e r s / F i l i p e / D e s k t o p / U n i v e r s i d a d e / M e s t r a d o / T e s e / ’\
’ V i s u a l V e r t e b r a / V i s u a l V e r t e b r a / ’
Ext = cv2 . i m r e a d ( c a m i n h o + ’ sagital - Ext . png ’, 0 ) F l e x = cv2 . i m r e a d ( c a m i n h o + ’ sagital - F l e x . png ’, 0 )
Figura 3.1.: Fluxograma
Antes de importar as imagens é necessário fornecer a diretoria de trabalho, isto, é a pasta de onde se vai importar as imagens e onde se vão guardar os novos ficheiros criados. Aqui, a diretoria é definida na variável caminho.
Após identificada a diretoria de trabalho, já se podem importar as duas imagens que, de forma a distingui-las, vão estar identificadas por duas variáveis:
Ext: para a imagem de extensão;
Flex: para a imagem de flexão.
Para importar as imagens recorreu-se à função imread da libraria OpenCV, onde se indica o caminho e nome da imagem e um segundo parâmetro com o valor 0 para garantir que a imagem a importar é a preto e branco.
3.1.2. Ajuste das imagens
A resolução em píxel das imagens clínicas obtidas por raio-X são de grande dimensão. Estas são geralmente obtidas à escala de 1:1 para permitir aos clínicos uma fácil avaliação do paciente. Isso, contudo, implica um tempo de computação de processamento de imagem maior, o que é indesejável quando se trata de múltiplas tarefas de processamento. De forma a reduzir este tempo de computação, foi introduzido no programa um código inicial de ajuste para a dimensão das imagens. Este código foi desenvolvido como uma função que garante que ambas as imagens passam exatamente pelo mesmo processo:
def r e s z ( img , d i v f a c t ):
height , w i d t h = img .s h a p e[ :2]
res = cv2 . r e s i z e ( img ,( w i d t h/divfact , h e i g h t/d i v f a c t ) ,\ i n t e r p o l a t i o n = cv2 . I N T E R _ C U B I C )
if img is Ext:
r e s i = cv2 . i m w r i t e ( c a m i n h o + ’ sagital - Ext - r . png ’, res )
e l i f img is F l e x:
r e s i = cv2 . i m w r i t e ( c a m i n h o + ’ sagital - Flex - r . png ’, res )
r e t u r n r es i
À função é atribuído o nome de resz (diminutivo escolhido de resize), que vai ser utilizado para chamar a função no programa. Esta função necessita de duas variáveis:
img: nesta variável é definida a imagem que vai ser redimensionada;
divfact: esta variável define o fator de divisão para o novo tamanho da imagem.
Após introduzidas as variáveis é necessário retirar os parâmetros da imagem: altura (height ) e largura (width), que é feito utilizando o comando shape, que aqui é utilizado como img.shape[:2].
Conhecendo a altura e largura da imagem é possível criar uma nova imagem através da variável res utilizando a função resize da libraria OpenCV.
A função resize requer três parâmetros de entrada:
1. imagem que é necessário redimensionar (img);
2. as novas dimensões da imagem (neste caso são obtidas dividindo pelo factor de divisão);