Por
Tiago Manuel Afonso Porto
Orientador: Doutor Raul Manuel Pereira Morais dos Santos
Co-orientador: Doutor Francisco de Sousa Pereira
Disserta¸c˜ao submetida `a
UNIVERSIDADE DE TR ´AS-OS-MONTES E ALTO DOURO para obten¸c˜ao do grau de
MESTRE
em Engenharia Electrot´ecnica e de Computadores, de acordo com o disposto no DR – I s´erie– No
151, Decreto-Lei n.o
115/2013 de 7 de Agosto e no Regulamento de Estudos Conducente ao Grau de Mestre da UTAD
DR, 2.a
s´erie – No
Por
Tiago Manuel Afonso Porto
Orientador: Doutor Raul Manuel Pereira Morais dos Santos
Co-orientador: Doutor Francisco de Sousa Pereira
Disserta¸c˜ao submetida `a
UNIVERSIDADE DE TR ´AS-OS-MONTES E ALTO DOURO para obten¸c˜ao do grau de
MESTRE
em Engenharia Electrot´ecnica e de Computadores, de acordo com o disposto no DR – I s´erie– No
151, Decreto-Lei n.o
115/2013 de 7 de Agosto e no Regulamento de Estudos Conducente ao Grau de Mestre da UTAD
DR, 2.a
s´erie – No
Doutor Raul Manuel Pereira Morais dos Santos
Professor Associado com Agrega¸c˜ao do Departamento de Engenharias
Universidade de Tr´as-os-Montes e Alto Douro
Doutor Francisco de Sousa Pereira
Professor Auxiliar do Departamento de Engenharias
Universidade de Tr´as-os-Montes e Alto Douro
Os membros do J´uri recomendam `a Universidade de Tr´as-os-Montes e Alto Douro a aceita¸c˜ao da disserta¸c˜ao intitulada “Interfaces para sistemas de dom´otica” realizada por Tiago Manuel Afonso Porto para satisfa¸c˜ao parcial dos requisitos do grau de Mestre.
Janeiro 2018
Presidente: Doutor Jo˜ao Paulo Fonseca da Costa Moura,
Professor Auxiliar da Escola de Ciˆencias e Tecnologia da Universidade de Tr´as-os-Montes e Alto Douro
Vogais do J´uri: S´ergio Adriano Fernandes Lopes,
Professor Auxiliar da Escola de Engenharia da Universidade do Minho
Doutor Raul Manuel Pereira Morais dos Santos,
Professor Associado com Agrega¸c˜ao do Departamento de Engenharias da Universidade de Tr´as-os-Montes e Alto Douro
Submetido na Universidade de Tr´as-os-Montes e Alto Douro para o preenchimento dos requisitos parciais para obten¸c˜ao do grau de
Mestre em Engenharia Electrot´ecnica e de Computadores
Resumo — A dom´otica ´e uma tecnologia que tem sido beneficiada com a evolu¸c˜ao das ´areas de automa¸c˜ao e sistemas de informa¸c˜ao, permitindo controlar e automatizar, local ou remotamente, as fun¸c˜oes dos equipamentos de uma habita¸c˜ao, atrav´es de um sistema central. Existem v´arios protocolos que permitem a comunica¸c˜ao de dados entre os equipamentos de um sistema dom´otico, entre eles o KNX, X10, ZigBee, Wi-Fi entre outros, que s˜ao apresentados neste estudo. O utilizador tem ao seu dispor a informa¸c˜ao gerida, atrav´es de uma interface web para computador, smartphone ou tablet.
O objetivo global deste trabalho consiste em desenvolver uma interface web para um sistema dom´otico, onde v´arios dispositivos comunicam com um elemento central de controlo, sobre o qual se implementa a interface de utilizador. Usando tecnologias de baixo custo como o Raspberry Pi consegue-se desenvolver uma interface pr´atica para monitoriza¸c˜ao/controlo de uma casa, com uma liga¸c˜ao HDMI a uma televis˜ao. O sistema implementado corre no Raspberry Pi, que cont´em o servidor (Apache), base de dados (MySQL) e interface gr´afica. A linguagem utilizada para o back-end foi essencialmente PHP e para o front-end HTML juntamente com as bibliotecas de Bootstrap, que permitiram `a interface adaptar-se a diferentes tamanhos de ecr˜a. A interface desenvolvida foi exaustivamente testada em v´arios cen´arios de utiliza¸c˜ao com v´arios dispositivos, mostrando a viabilidade do sistema desenvolvido.
Palavras Chave: Dom´otica, protocolos de comunica¸c˜ao, interfaces web, sistemas embebidos, servidor, base de dados.
Submitted to the University of Tr´as-os-Montes and Alto Douro in partial fulfillment of the requirements for the degree of Master of Science in Electrical Engineering and Computers
Abstract — Home automation is a technology that has been benefited by the evolution of automation and information system areas, allowing to control and automate, locally or remotely, equipments of a dwelling, through a central system. There are several protocols that allow the communication of data between the equipment of a home automation system, such as KNX, X10, ZigBee, Wi-Fi among others, which are presented in this study. The user has at his disposal the information managed, through a web interface from a computer, smartphone or tablet.
The overall objective of this work is to develop a web interface for a home automation system, where several devices communicate with a central control element, on which the user interface is implemented. Using low-cost technologies such as Raspberry Pi you can develop a practical interface for monitoring/controlling a home, with an HDMI connection to a television. The implemented system runs on Raspberry Pi, which contains the server (Apache), database (MySQL) and graphical interface. The language used for the back-end was essentially PHP and for the front-end HTML along with Bootstrap libraries, which allowed the interface to adapt to different screen sizes.
The developed interface was thoroughly tested in several scenarios of use with many devices, showing the viability of the developed system.
Key Words: Home automation, communication protocols, web interfaces, embedded systems, server, data base.
O espa¸co limitado desta sec¸c˜ao de agradecimentos, seguramente n˜ao me permite agradecer, como devia, a todas as pessoas que, ao longo do meu Mestrado me ajudaram direta ou indiretamente, a cumprir os meus objetivos e a realizar mais esta etapa da minha forma¸c˜ao acad´emica. Desta forma, deixo apenas algumas palavras, poucas, mas um sentido e profundo sentimento de reconhecido agradecimento. Ao Professor Doutor Raul Manuel Pereira Morais dos Santos, expresso o meu profundo agradecimento pela orienta¸c˜ao e ideias inovadoras, que muito elevaram os meus conhecimentos cient´ıficos e, sem d´uvida, muito estimularam o meu desejo de querer fazer melhor.
Ao Professor Doutor Francisco de Sousa Pereira, na qualidade de co-orientador, pelas suas observa¸c˜oes e orienta¸c˜oes.
Aos meus amigos, pelos intermin´aveis desabafos, pela partilha de bons e maus momentos, pela amizade, companhia e afeto, fatores muito importantes para a realiza¸c˜ao desta tese e que me permitiram que cada dia fosse encarado com particular motiva¸c˜ao. Tamb´em uma referˆencia especial ao Antero e Adriano, pela enorme amizade que cri´amos e pela forma como me acolheram e integraram em Vila Real. Agrade¸co-lhes a partilha de bons momentos, a ajuda e os est´ımulos nas alturas de desˆanimo.
Resumo ix
Abstract xi
Agradecimentos xiii
´Indice de tabelas xix
´Indice de figuras xxi
Gloss´ario, acr´onimos e abreviaturas xxiii
1 Introdu¸c˜ao 1
1.1 Motiva¸c˜ao e objetivos . . . 1
1.2 Sistemas dom´oticos . . . 2
1.3 Interfaces dom´oticas . . . 3
1.4 Organiza¸c˜ao da disserta¸c˜ao. . . 4
2 Sistemas dom´oticos 5 2.1 Protocolos para sistemas de dom´otica . . . 5
2.1.1 Comunica¸c˜ao pela rede el´etrica X10 . . . 6
2.1.2 Comunica¸c˜ao por barramento KNX . . . 10
2.1.3 CEBus . . . 12
2.1.4 LonWorks . . . 14
2.1.5 ZigBee . . . 16 xv
2.2.6 MEO Smart Home . . . 39
2.2.7 HomeKit. . . 41
2.3 Conclus˜ao das tecnologias estudadas . . . 42
3 Proposta de um sistema dom´otico 45 3.1 Arquitetura do sistema . . . 45
3.2 Atores e casos de uso . . . 46
3.3 Diagrama ER . . . 48 3.3.1 Tabela Administrador . . . 48 3.3.2 Tabela Alarmes . . . 49 3.3.3 Tabela Atuadores . . . 49 3.3.4 Tabela Leituras . . . 50 3.3.5 Tabela Microcontroladores . . . 50
3.3.6 Tabela Notifica¸c˜oes de Alarmes . . . 51
3.3.7 Tabela Sensores . . . 51
3.3.8 Tabela Temporiza¸c˜oes . . . 51
4 Implementa¸c˜ao da interface do sistema dom´otico 55 4.1 Tecnologias utilizadas . . . 55
4.2 Cria¸c˜ao de uma rede sem fios de dispositivos dom´oticos . . . 58
4.3 Servidor web e base de dados . . . 62
4.4 Seguran¸ca . . . 62
4.5 Interface da aplica¸c˜ao web . . . 63
4.5.1 Barra de navega¸c˜ao . . . 63
4.5.2 P´agina Registar alarmes . . . 64
4.5.3 P´agina Registar microcontroladores . . . 65
4.5.4 P´agina Registar sensores . . . 66
4.5.5 P´agina Registar temporiza¸c˜oes. . . 67
4.5.6 P´agina Home . . . 69
4.5.7 P´agina Leituras . . . 71 xvi
4.5.11 P´agina Consultar temporiza¸c˜oes . . . 75
4.5.12 P´agina Editar microcontroladores e atuadores . . . 77
4.5.13 P´agina Gr´aficos . . . 79
4.5.14 P´agina Stream . . . 80
4.5.15 Disparo de Alarmes . . . 81
4.6 Registo do hist´orico . . . 81
5 Testes e resultados 83 5.1 Funcionamento em dispositivos m´oveis e fixos . . . 83
5.2 Execu¸c˜ao de testes e resultados . . . 85
5.2.1 Testes de listagem de dispositivos . . . 85
5.2.2 Testes de opera¸c˜ao em atuadores . . . 86
5.2.3 Resultado de um exemplo pr´atico . . . 87
6 Conclus˜ao e perspetivas futuras 89
Referˆencias bibliogr´aficas 91
A Protocolo de mensagens 97
A.1 Estrutura da mensagem no registo de sensores/atuadores. . . 98
A.2 Estrutura da mensagem na atualiza¸c˜ao de sensores. . . 98
A.3 Estrutura da mensagem na atualiza¸c˜ao do nome dos dispositivos I/O. 98
A.4 Estrutura da mensagem na atualiza¸c˜ao do nome dos sensores/atuadores. 99
1.1 Exemplo de um sistema dom´otico . . . 2
2.1 M´odulo X10 para controlo da ilumina¸c˜ao de uma casa . . . 7
2.2 Dispositivos compat´ıveis com o protocolo X10 . . . 9
2.3 Dispositivos compat´ıveis com o protocolo KNX . . . 11
2.4 Gateway LonWorks . . . 15
2.5 Dispositivos compat´ıveis com o protocolo ZigBee . . . 18
2.6 Sistema dom´otico Z-Wave . . . 21
2.7 Sensor de movimento compat´ıvel com Bluetooth . . . 24
2.8 M´odulo compat´ıvel com Bluetooth, para controlo da ilumina¸c˜ao de uma casa. . . 25
2.9 Componentes t´ıpicos de uma rede Wi-Fi . . . 27
2.10 M´odulo e lˆampadas compat´ıveis com Wi-Fi . . . 28
2.11 M´aquina de caf´e compat´ıvel com Wi-Fi . . . 29
2.12 Aquecedor inteligente compat´ıvel com Wi-Fi . . . 29
2.13 Dispositivos Insteon numa rede peer-to-peer . . . 30
2.14 Dispositivos dom´oticos Insteon. . . 31
2.15 Interface da plataforma openHAB . . . 33 xxi
3.2 Diagrama de casos de uso do sistema . . . 47
3.3 Diagrama ER . . . 53
4.1 Raspberry Pi 3 . . . 57
4.2 Ilustra¸c˜ao da p´agina Registar alarmes . . . 65
4.3 Ilustra¸c˜ao da p´agina Registar microcontroladores . . . 66
4.4 Ilustra¸c˜ao da p´agina Registar sensores . . . 67
4.5 Ilustra¸c˜ao da p´agina Registar temporiza¸c˜oes do tipo ´Unico . . . 68
4.6 Ilustra¸c˜ao da p´agina Registar temporiza¸c˜oes do tipo Recorrente . . . 69
4.7 Ilustra¸c˜ao da p´agina Home . . . 70
4.8 Ilustra¸c˜ao da p´agina Leituras . . . 72
4.9 Ilustra¸c˜ao da p´agina Consultar alarmes . . . 73
4.10 Ilustra¸c˜ao da p´agina Consultar microcontroladores . . . 74
4.11 Ilustra¸c˜ao da p´agina Consultar sensores . . . 75
4.12 Ilustra¸c˜ao da p´agina Consultar temporiza¸c˜oes . . . 76
4.13 Ilustra¸c˜ao da p´agina Editar microcontroladores . . . 77
4.14 Ilustra¸c˜ao da p´agina Editar atuadores . . . 79
4.15 Ilustra¸c˜ao da p´agina Gr´aficos . . . 80
4.16 Ilustra¸c˜ao do disparo de um Alarme . . . 81
5.1 Interface num ecr˜a de computador . . . 84
5.2 Interface num ecr˜a de telem´ovel . . . 84
5.3 Funcionamento do sistema quando um atuador ´e comutado . . . 87
5.4 Exemplo de um atuador ap´os ser comutado pela interface . . . 88 xxii
abreviaturas
Lista de acr´
onimos
Sigla Expans˜ao AP Access Point
AWS Amazon Web Services BCI BatiBUS Club International BLE Bluetooth Low Energy bps Bits per second
BSS Basic Service Set CAL Command Language CEBus Consumer Electronic Bus CSMA Carrier Sense Multiple Access
CSMA/CD CR Carrier Sense Multiple Access with Collision Detection and Collision Resolution
DHCP Dynamic Host Configuration Protocol DS Sistema de Distribui¸c˜ao
EEPROM Electrically-Erasable Programmable Read-Only Memory xxiii
ETS Engineering Tools Software GPIO General Purpose Input/Output HCI Host to Controller Interface IP Internet Protocol
JSON JavaScript Object Notation KNX Konnex Networks
LCP Link Control Protocol
L2CAP Logical Link Control and Adaptation Protocol LMP Link Manager Protocol
LSB Less Significant Bit MAC Media Access Control MSB Most Significant Bit
NAT Network Address Translation OBEX Object Exchange Protocol PAN Personal Area Network PPP Point-to-Point
PWM Pulse-Width Modulation
RFCOMM Radio Frequency Communication SBC Single Board Computer
SDP Service Discovery Protocol SIG Special Interest Group
UI User Interface
U-NII Unlicensed National Information Infrastructure WPAN Wireless Personal Area Network
Lista de abreviaturas
Abreviatura Significado(s) e.g. por exemplo et al. e outros (autores) etc. etecetera, outros i.e. isto ´e, por conseguinte vid. veja-se, ver
vs. versus, por compara¸c˜ao com
Neste primeiro cap´ıtulo ser´a apresentado o objetivo principal deste projeto, bem como a motiva¸c˜ao para a realiza¸c˜ao do mesmo. Tamb´em ´e feita uma apresenta¸c˜ao do contexto em que se insere a disserta¸c˜ao, atrav´es de uma abordagem dos sistemas e interfaces dom´oticas.
1.1
Motiva¸c˜
ao e objetivos
A motiva¸c˜ao desta disserta¸c˜ao residiu em investigar as tecnologias de comunica¸c˜oes sem fios, sistemas embebidos e interfaces web que permitam uma intera¸c˜ao entre um sistema de dom´otica e os seus utilizadores. O estudo das interfaces e a gest˜ao de uma rede de dispositivos distribu´ıdos por uma habita¸c˜ao permitiram um ganho importante de competˆencias nesta ´area de trabalho, aliado `a instala¸c˜ao de um prot´otipo de sistema de interface baseado em Raspberry Pi, que possibilita o controlo dos dispositivos Wi-Fi instalados na habita¸c˜ao (no ˆambito de um projeto em paralelo) assim como o seu acesso remoto. Este trabalho visa a cria¸c˜ao de uma interface web, que permita controlar e monitorizar dispositivos instalados numa habita¸c˜ao.
1.2
Sistemas dom´
oticos
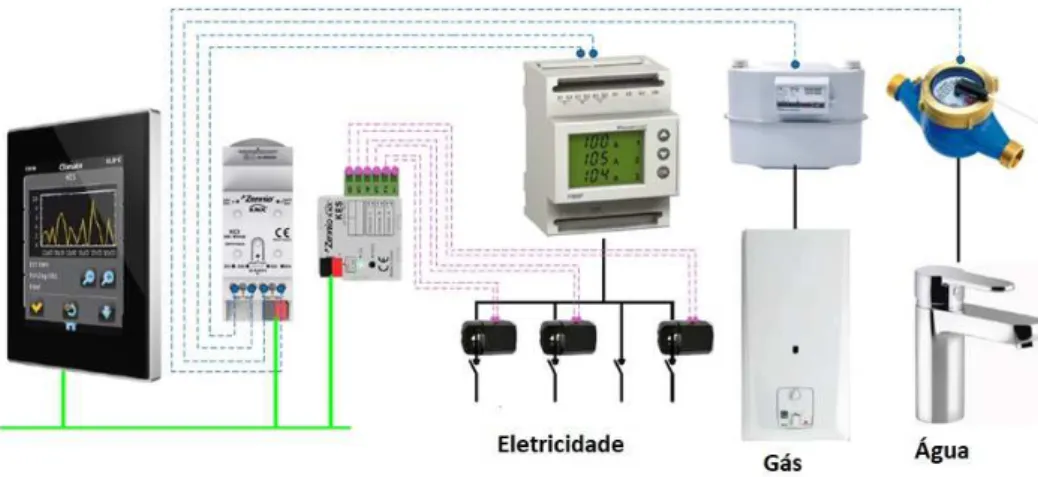
A dom´otica ´e um conceito que permite a gest˜ao de todos ou parte dos recursos el´etricos e eletr´onicos habitacionais. Tem como objetivo controlar e automatizar, local ou remotamente, as fun¸c˜oes dos equipamentos de uma habita¸c˜ao, atrav´es de um sistema central. Hoje em dia existem diversos m´etodos que permitem a instala¸c˜ao de sistemas inteligentes numa habita¸c˜ao, esteja ela habitada ou em constru¸c˜ao. As instala¸c˜oes mais comuns integram interruptores, sensores e atuadores conectados a um “gateway”, que permite o acionamento inteligente com base no processamento de dados. Para a comunica¸c˜ao de dados, existem v´arias op¸c˜oes como barramentos, sistemas cablados e tecnologias mais recentes de comunica¸c˜ao sem fios. Numa fase posterior o utilizador tem ao seu dispor a informa¸c˜ao gerida, atrav´es de um computador, smartphone ou tablet que poder˜ao ter mais ou menos fun¸c˜oes de acordo com o desejo do instalador e/ou cliente.
Figura 1.1– Exemplo de um sistema dom´otico (Electro Pisca, LDA).
O aumento da popularidade dos sistemas dom´oticos deve-se `as suas vantagens, destacando-se, o aumento do n´ıvel de conforto e de seguran¸ca, a automa¸c˜ao de
em casa e ainda controlar o consumo de ´agua, g´as, etc.
Apesar das suas vantagens, a dom´otica tem um percurso dif´ıcil no mercado. Frequente-mente n˜ao ´e poss´ıvel interligar produtos de diferentes fabricantes, pelo que surgiu a necessidade de normalizar as tecnologias, de modo a que produtos de v´arios propriet´arios pudessem comunicar entre si, reduzindo tamb´em os custos para o cliente e aumentando a diversidade de escolha. Existem v´arias normas no mercado, podendo-se destacar o KNX, X10, ZigBee, Wi-Fi, entre outras, devido ao papel fundamental que tiveram na divulga¸c˜ao da dom´otica.
1.3
Interfaces dom´
oticas
Ao n´ıvel das liga¸c˜oes remotas, as interfaces web s˜ao as mais utilizadas, visto que permitem ao utilizador controlar e monitorizar a sua casa, atrav´es de qualquer dispositivo com liga¸c˜ao `a internet via browser, independentemente da sua localiza¸c˜ao. Estas interfaces s˜ao respons´aveis pela visualiza¸c˜ao e monitoriza¸c˜ao, o que ajuda o utilizador a configurar os dispositivos instalados na habita¸c˜ao e visualizar, por exemplo, uma transmiss˜ao ao vivo de cˆamaras instaladas na habita¸c˜ao. V´arias linguagens de programa¸c˜ao podem ser utilizadas na web, de forma a criar um ambiente dinˆamico, sendo as mais populares o PHP e o Javascript.
Recentemente, o conceito de IoT (Internet of Things) tem ganho destaque na cria¸c˜ao de sistemas distribu´ıdos, recorrendo `a cloud computing. Assim, tendo em conta que nos dias de hoje a maioria das pessoas passa grande parte do seu tempo fora da sua habita¸c˜ao e considerando a grande mobilidade destas no mundo atual, verifica-se que uma casa inteligente deve proporcionar ao ser humano uma elevada intera¸c˜ao
espa¸co-temporal com todos os equipamentos da sua casa, destacando-se as interfaces web com uma importˆancia particular, pois permitem ao utilizador essa intera¸c˜ao, quer local ou remota.
Neste trabalho de disserta¸c˜ao analisam-se alguns dos m´etodos e linguagens de programa-¸c˜ao, para a cria¸c˜ao de uma interface web, que proporcione ao utilizador a possibilidade de gerir, local ou remotamente, a informa¸c˜ao contida na rede da sua habita¸c˜ao, atrav´es de tecnologias de comunica¸c˜ao de dados sem fios.
1.4
Organiza¸c˜
ao da disserta¸c˜
ao
Esta disserta¸c˜ao encontra-se estruturada em seis cap´ıtulos. No cap´ıtulo atual fez-se uma introdu¸c˜ao de enquadramento e apresentaram-se as motiva¸c˜oes e os objetivos do trabalho.
O cap´ıtulo 2 inicia-se com uma abordagem dos v´arios protocolos utilizados na ´area da dom´otica que permitem a comunica¸c˜ao entre os dispositivos. Posteriormente faz-se uma an´alifaz-se e compara¸c˜ao das tecnologias existentes no mercado, que facultam ao utilizador o controlo de equipamentos, atrav´es de uma interface gr´afica.
A arquitetura do sistema, bem como os diagramas de casos de usos e ER s˜ao apresentados no cap´ıtulo 3.
O cap´ıtulo 4 ´e dedicado `a configura¸c˜ao do Raspberry Pi, cria¸c˜ao da rede local, tecnologias implementadas e apresenta¸c˜ao das v´arias p´aginas constituintes da interface web criada.
No cap´ıtulo 5, faz-se uma discuss˜ao dos resultados e testes simulados.
Para finalizar a disserta¸c˜ao, no cap´ıtulo 6, faz-se uma conclus˜ao geral do projeto e apresentam-se algumas perspetivas de trabalho futuro.
Este cap´ıtulo inicia-se com uma apresenta¸c˜ao geral dos protocolos de comunica¸c˜ao utilizados na ´area da Dom´otica, fazendo-se posteriormente uma an´alise espec´ıfica para cada um deles. S˜ao apresentadas as v´arias tecnologias existentes no mercado, que permitem ao utilizador controlar e monitorizar os dispositivos dom´esticos, atrav´es de uma interface gr´afica com o utilizador.
2.1
Protocolos para sistemas de dom´
otica
As formas de comunica¸c˜ao entre dispositivos ou equipamentos s˜ao realizadas atrav´es de protocolos normalizados. Ou seja, um dispositivo apenas pode comunicar com outro caso obede¸cam ambos ao mesmo protocolo. De forma a tornar poss´ıvel a comunica¸c˜ao entre dispositivos, cada protocolo utiliza meios espec´ıficos de comunica-¸c˜ao, entre eles, a rede el´etrica, sistemas cablados e sistemas sem fios. De um modo geral, os sistemas cablados, s˜ao a solu¸c˜ao mais adequada quando a constru¸c˜ao da habita¸c˜ao ´e feita de raiz. Por´em tamb´em pode ser aplicada em remodela¸c˜oes, com uma dificuldade acrescida, devido ao facto de obrigar a passar nova cablagem. Este meio tem a vantagem de ser dedicado e imune a interferˆencias. Quando
as dificuldades para montar uma nova infraestrutura f´ısica s˜ao muito elevadas e dispendiosas, as tecnologias sem fios apresentam-se como a melhor solu¸c˜ao. Este tipo de tecnologias n˜ao s˜ao t˜ao fi´aveis devido `as interferˆencias e ao limite de alcance da rede. Nas solu¸c˜oes sem fios est˜ao dispon´ıveis o Wi-Fi, Bluetooth, Z-Wave e ZigBee, destacando por serem os protocolos mais relevantes no mercado. A rede el´etrica foi o primeiro meio utilizado para controlo de equipamentos, sendo o protocolo X10 o principal impulsionador deste sistema. Neste meio de comunica¸c˜ao, utilizam-se os circuitos el´etricos existentes numa casa para enviar os sinais de controlo. Este meio destaca-se pela facilidade da configura¸c˜ao dos dispositivos e n˜ao necessidade de nova cablagem. Contudo as baixas taxas de transmiss˜ao e a possibilidade de interferˆencias atrav´es de outros aparelhos ligados `a instala¸c˜ao el´etrica da casa apresentam-se como as suas maiores desvantagens.
Nas subsec¸c˜oes que se seguem s˜ao analisados diversos protocolos que se podem aplicar na ´area da dom´otica, fazendo-se uma an´alise pormenorizada das suas caracte-r´ısticas, vantagens e desvantagens.
2.1.1
Comunica¸c˜
ao pela rede el´
etrica X10
O X10 ´e um protocolo de comunica¸c˜ao entre dispositivos eletr´onicos, assente na comunica¸c˜ao de dados pela rede el´etrica. Foi desenvolvido na d´ecada de 70 pela empresa Pico Electronics Ltd, na Esc´ocia, com o intuito de transmitir dados atrav´es da instala¸c˜ao el´etrica de uma habita¸c˜ao (Rye, 1999). A utiliza¸c˜ao da rede de distribui¸c˜ao de energia el´etrica como meio de comunica¸c˜ao entre os v´arios dispositivos, torna esta tecnologia um sucesso comercial, uma vez que permite a sua implementa¸c˜ao durante e ap´os a constru¸c˜ao de uma casa, sem necessidade de cabos adicionais (Flores, 2005).
Figura 2.1– M´odulo X10 para controlo da ilumina¸c˜ao de uma casa (X10 Home Automation Blog).
Neste protocolo ´e poss´ıvel identificar trˆes tipos de dispositivos X10 (Rye,1999):
• Recetores: s´o podem receber ordens. Possuem dois comutadores girat´orios, um deles com 16 letras e outro com 16 n´umeros, que permitem criar um endere¸co e identificar uma dire¸c˜ao. Podendo no m´aximo endere¸car 16 × 16 = 256 dispositivos. Um recetor pode receber ordens de v´arios transmissores;
• Transmissores: s˜ao respons´aveis por enviar ordens;
• Bidirecionais: podem enviar e receber ordens, o que se torna importante, pois permite confirmar a realiza¸c˜ao com sucesso de uma determinada ordem.
O envio de informa¸c˜ao atrav´es da rede el´etrica recorre ao uso de bursts de sinais de r´adio frequˆencia com 120 kHz. Cada burst1 tem a dura¸c˜ao de 1 ms e ´e inserido
1
em sincronismo com a passagem pela origem da onda sinusoidal de 50 Hz da rede el´etrica. O bit-1 corresponde `a presen¸ca do burst de 120 kHz e o bit-0 `a ausˆencia do mesmo. No caso das instala¸c˜oes el´etricas trif´asicas, onde as correntes est˜ao desfasadas 120◦ umas das outras, o burst ´e enviado a cada 120◦, sendo transmitido
trˆes vezes de forma a coincidir com a passagem pela origem das trˆes fases. De forma a melhorar a rela¸c˜ao sinal/ru´ıdo e reduzir a probabilidade do sinal v´alido ser confundido com ru´ıdo el´etrico, estabeleceu-se que por cada bit ´e enviado o seu valor l´ogico e o seu complemento. Ou seja, se o objetivo ´e enviar o bit 1, isso corresponde a enviar um 1 (120 kHz) seguido de um 0 (ausˆencia de sinal) e vice-versa. Por´em tem como aspeto negativo reduzir o ritmo de transmiss˜ao, ficando restrito a 50 bps. Como consequˆencia das velocidades serem baixas, os transmissores s´o conseguem realizar opera¸c˜oes simples com poucos dados, como por exemplo ligar ou desligar aparelhos e luzes (Flores, 2005).
Uma transmiss˜ao no padr˜ao X10 cont´em quatro campos (Nunes, 2002):
• C´odigo de in´ıcio: todos os comandos s˜ao iniciados com o c´odigo “1110” de modo a sinalizar o in´ıcio de uma trama. Ao contr´ario dos outros campos, esta sequˆencia n˜ao ´e acompanhada dos respetivos bits complementares;
• C´odigo da casa: conjunto de 4 bits e respectivos complementos que identificam uma casa. Permite distinguir 16 casas;
• C´odigo do Dispositivo ou C´odigo da Fun¸c˜ao: conjunto de 4 bits e respetivos complementos que identificam o n´umero de um dispositivo ou o c´odigo de uma fun¸c˜ao a executar;
• Dispositivo/Fun¸c˜ao: indica se o campo anterior corresponde a um dispositivo ou a uma fun¸c˜ao. Utiliza-se um bit seguido do seu valor complementar.
Num determinado c´odigo de casa n˜ao ´e poss´ıvel ter mais de 16 dispositivos. Na mesma habita¸c˜ao ´e poss´ıvel usar diferentes c´odigos de casa o que permite utilizar 8 bits para endere¸car dispositivos (4 do c´odigo de casa e 4 do c´odigo do dispositivo),
Figura 2.2 – Dispositivos compat´ıveis com o protocolo X10 (Home Controls).
permitindo assim um m´aximo de 256 dispositivos. Uma vez que na mesma trama n˜ao ´e poss´ıvel referir um dispositivo e ao mesmo tempo a fun¸c˜ao que este deve executar, um comando X10 possui duas ac¸c˜oes: uma para activar um dado dispositivo e outra com a indica¸c˜ao da fun¸c˜ao. O sistema X10 pode ser constitu´ıdo por um conjunto de dispositivos que s˜ao controlados diretamente pelo utilizador atrav´es de um comando remoto (Nunes,2002).
Vantagens:
• Simplicidade;
• Facilidade de instala¸c˜ao e uso;
• Custo acess´ıvel.
Desvantagens:
• N´umero limitado de fun¸c˜oes;
• Velocidades de comunica¸c˜ao baixas;
2.1.2
Comunica¸c˜
ao por barramento KNX
O KNX (Konnex Networks) ´e um protocolo de comunica¸c˜ao internacional utilizado na automa¸c˜ao de edif´ıcios, baseado no Modelo OSI. A iniciativa surgiu pela convergˆen-cia de trˆes assoconvergˆen-cia¸c˜oes Europeias (EIBA, BCI e EHSA) com o objetivo de criar um standart Europeu ´unico para a Dom´otica. Caracteriza-se por ser um protocolo flex´ıvel, uma vez que pode incluir gateways para v´arios meios de comunica¸c˜ao entre eles o par entrela¸cado, a rede el´etrica, os infravermelhos e a radiofrequˆencia (Pinto,
2010).
A vers˜ao atual possu´ı trˆes modos de funcionamento (Neugschwandtner and Kastner,
2009):
• S-mode (System mode): Utilizado em instala¸c˜oes mais complexas com um n´ıvel elevado de integra¸c˜ao e de fun¸c˜oes a implementar. Os dispositivos S-mode s˜ao configurados e instalados por profissionais atrav´es de um softwre espec´ıfico, o ETS;
• E-mode (Easy mode): neste modo os dispositivos s˜ao programados na f´abrica de forma a executarem uma fun¸c˜ao concreta. Por´em alguns detalhes s˜ao configurados no local da instala¸c˜ao atrav´es de um controlador ou de micro-interruptores presentes no dispositivo;
• A-mode (Automatic mode): apresenta uma filosofia Plug and Play onde n˜ao ´e necess´ario a interven¸c˜ao do utilizador ou de um instalador para configurar o dispositivo. Este modo aplica-se melhor a eletrodom´esticos e dispositivos de entretenimento.
O KNX possu´ı tamb´em uma norma diferente, dependendo do meio f´ısico de comunica-¸c˜ao que for utilizado. A rede distribu´ıda pode ter at´e 65536 dispositivos com endere¸cos individuais de 16 bit que podem ser de dois tipos: de grupo ou individual. A nota¸c˜ao dos endere¸cos ´e constitu´ıda por 2 octetos com 2 n´umero decimais de 4 bits e 1 de 8 bits, o que permite obter endere¸cos desde 0.0.00 at´e 15.15.255. O
corresponde ao endere¸co da linha e s˜ao os 4 bits LSB do mesmo octeto. No octeto 1 ´e onde se encontra o endere¸co do dispositivo, correspondendo ao terceiro n´umero decimal na denota¸c˜ao dos endere¸cos com dois pontos. Visto que o endere¸co do dispositivo ´e representado com 8 bits, o n´umero m´aximo de dispositivos por ´area e linha ´e 256 (da Silva Mendes, 2010).
Figura 2.3 – Dispositivos compat´ıveis com o protocolo KNX (Zennio).
Numa rede KNX ´e poss´ıvel obter v´arias ´areas que contˆem v´arias sub-redes. Cada ´area tem uma linha principal `a qual se ligam no m´aximo 15 sub-redes, tamb´em denominadas por linhas, porque o endere¸co da ´area utiliza apenas 4 bits e o endere¸co 0 ´e reservado para o acoplador entre a linha principal e o backbone. No backbone s´o se pode ligar no m´aximo 15 ´areas, pois o seu endere¸co utiliza tamb´em 4 bits e o endere¸co 0 ´e reservado para definir os dispositivos KNX que se ligam diretamente a este (Lee and Hong, 2008).
Vantagens:
• Suporte para diferentes modos de configura¸c˜ao; • Suporte para diferentes meios de comunica¸c˜ao; • Oferece elevada flexibilidade.
Desvantagens:
• Elevados custos de implementa¸c˜ao;
• Precisa de um software espec´ıfico para configurar os dispositivos.
2.1.3
CEBus
O CEBus (Consumer Electronic Bus), patrocinado pela Electronic Industries Associa-tion (EIA), ´e uma norma para a comunica¸c˜ao entre dispositivos. Abrange carater´ısticas das camadas de aplica¸c˜ao, rede, de liga¸c˜ao l´ogica de dados e f´ısica do modelo OSI. A n´ıvel f´ısico, possui suporte para diversos meios de comunica¸c˜ao, tais como: rede el´etrica, par entrela¸cado, cabo coaxial, fibra ´otica, infravermelhos e radiofrequˆencia. De forma a tornar poss´ıvel a interliga¸c˜ao entre os diferentes meios de comunica¸c˜ao, s˜ao utilizados gateways, data-bridges e bridge routers (Vargas, 2004).
A transmiss˜ao de informa¸c˜ao ´e realizada atrav´es de s´ımbolos. Cada s´ımbolo representa um tempo espec´ıfico entre a transi¸c˜ao de estado no suporte de transmiss˜ao, atrav´es da modula¸c˜ao por largura de pulso (PWM). S˜ao poss´ıveis apenas dois estados, SUPERIOR e INFERIOR, sendo a forma f´ısica de cada um espec´ıfica a cada suporte de transmiss˜ao. Os s´ımbolos poss´ıveis s˜ao apenas quatro (da Silva and de Carvalho,
2013):
• ONE (dura¸c˜ao de 1 estado); • ZERO (dura¸c˜ao de 2 estados);
Entre cada campo ´e necess´aria a existˆencia de um s´ımbolo EOF e no final de cada trama um s´ımbolo EOP. No caso de algum campo n˜ao ser transmitido, a representa¸c˜ao do respetivo lugar ´e feita por um s´ımbolo EOF. Esta tecnologia utiliza um endere¸co de grupo que permite agrupar v´arios dispositivos, sendo que cada um dos anteriores pode ter mais de que um endere¸co de grupo, o que permite assim a cria¸c˜ao de grupos l´ogicos de dispositivos (Vargas, 2004).
A t´ecnica utilizada no acesso ao meio f´ısico ´e a CSMA/CD CR (Carrier Sense Multiple Access with Collision Detection and Collision Resolution), que permite aos dispositivos acederem ao meio de comunica¸c˜ao a qualquer momento, desde que este esteja livre. Todos os dispositivos est˜ao ao mesmo n´ıvel e podem comunicar diretamente entre si, sem existˆencia de qualquer tipo de hierarquias, possibilitando um controlo distribu´ıdo, sem existˆencia de um controlador central. Este modelo oferece um comportamento do tipo Plug and Play, de forma a que os dispositivos possam ser inseridos no sistema a qualquer momento (Nunes, 2002).
O CEBus define uma linguagem de aplica¸c˜ao comum orientada a objetos (CAL), com o objetivo de modelar o comportamento dos dispositivos da rede como uma cole¸c˜ao de objetos. Um objeto ´e definido como um modelo de uma entidade funcional ´
unica, utilizado para executar uma tarefa de controlo ´unica. O modelo de objetos ´e implementado por um conjunto de vari´aveis de instˆancia, modelado por m´etodos. Os objetos tamb´em podem ser configurados para indicar mudan¸cas no estado das vari´aveis. Um objeto ´e gen´erico, n˜ao assume uma aplica¸c˜ao espec´ıfica at´e ser colocado num contexto espec´ıfico. Cada objeto, independentemente do produto a que est´a associado, comporta-se sempre de igual forma. A linguagem CAL permite consultar ou alterar valores de vari´aveis associadas a diferentes objetos, o que se reflete no estado ou comportamento dos dispositivos associados a esses objetos
(Corcoran and Lusted, 1994). Vantagens:
• Envio de informa¸c˜ao codificada;
• Suporte para diferentes meios de comunica¸c˜ao;
• Suporte para interopera¸c˜ao entre os dispositivos.
Desvantagens:
• Taxa de transmiss˜ao de dados reduzida;
• N˜ao permite encripta¸c˜ao de dados;
• Complexidade de implementa¸c˜ao;
• Custo elevado.
2.1.4
LonWorks
O LonWorks (Local Operations Network) ´e uma plataforma de comunica¸c˜ao em rede, baseada no LonTalk, um protocolo de comunica¸c˜ao criado pela empresa Echelon na d´ecada de 90, direcionada ao desempenho, fiabilidade e `as necessidades originais de manuten¸c˜ao de aplica¸c˜oes de controlo. Esta tecnologia implementa as sete camadas do modelo OSI e possui suporte para v´arios meios f´ısicos de comunica¸c˜ao, tais como: par entrela¸cado, rede el´etrica, infravermelhos, fibra ´otica e radiofrequˆencia. Apesar de conter todos os requisitos da maioria das aplica¸c˜oes de controlo, a sua implementa¸c˜ao apenas tem sucesso nos edif´ıcios administrativos, hot´eis e ind´ustrias. O custo dos dispositivos LonWorks condiciona a sua instala¸c˜ao nas casas, uma vez que existem no mercado outras tecnologias com presta¸c˜oes iguais e mais baratas (Pinto, 2010).
ID, respons´avel por sinalizar univocamente qualquer n´o numa rede de controlo. Este identificador ´e gravado na EEPROM durante o fabrico do circuito. O firmware que implementa o LonTalk proporciona servi¸cos de transporte e routing ponto-a-ponto. A comunica¸c˜ao entre circuitos ´e feita atrav´es do envio de telegramas, que podem ter at´e 229 octetos de informa¸c˜ao. Cada telegrama cont´em: informa¸c˜ao para o routing, a dire¸c˜ao do destinat´ario, dados de aplica¸c˜ao do utilizador e uma checklist como c´odigo detetor de erros (Lemos, 2011).
Figura 2.4 – Gateway LonWorks (LonMark International).
De modo a endere¸car um dispositivo numa rede LonWorks ´e necess´ario recorrer ao seu dom´ınio, subnet e n´o. A interconex˜ao entre dom´ınios ´e poss´ıvel, desde que o dispositivo tenha suporte para fun¸c˜oes de encaminhamento. Cada dom´ınio possui at´e 255 subnets, n˜ao existindo entre elas limita¸c˜ao de intera¸c˜oes entre dispositivos, cada subnet tem capacidade para 127 n´os. Atrav´es desta estrutura de endere¸camento, podem-se integrar at´e 248 dispositivos de rede. Cada dispositivo da rede possui um endere¸co l´ogico ´unico, quando se lhe envia uma mensagem, o dispositivo ´e identificado, n˜ao pelo Neuron ID, mas sim pelo dom´ınio, subnet e o n´umero do n´o. Este tipo de endere¸camento ´e utilizado quando o endere¸co do dispositivo j´a
est´a configurado. Existem tamb´em trˆes tipo de endere¸cos para o endere¸camento de pacotes: Device Adress, Group Adress e Broadcast Adress, consoante o objetivo seja transmitir para um ´unico m´odulo, para um grupo de m´odulos ou para todos os m´odulos, respetivamente. De forma a eliminar ou pelo menos minimizar as colis˜oes de transferˆencias, o LonWorks utiliza um algoritmo de controlo de acesso ao meio, denominado Predictive P-persistent CSMA, o qual permite que um canal opere na sua capacidade m´axima, mesmo no caso de sobrecarga da rede. Tal como qualquer protocolo CSMA, os dispositivos LonWorks acedem ao meio ap´os um per´ıodo de tempo com uma componente fixa e outra aleat´oria (Pinto,2010).
Vantagens:
• Arquitetura descentralizada;
• Suporte para diferentes meios de comunica¸c˜ao;
• Facilidade de implementa¸c˜ao.
Desvantagens:
• Utiliza um microcontrolador espec´ıfico (Neuron Chip);
• Custo elevado.
2.1.5
ZigBee
O ZigBee ´e um protocolo de rede, introduzido pela ZigBee Alliance, projetado para assentar na norma IEEE 802.15.4, a qual ´e respons´avel por definir as carater´ısticas da camada MAC para a Rede de ´area pessoal sem fios (WPAN). Para al´em destas especifica¸c˜oes o ZigBee veio acrescentar uma funcionalidade nova, que ´e a capacidade de estabelecer redes e fazer routing. O tipo de rede em malha (mesh networking) ´e predominantemente utilizado em aplica¸c˜oes em que o objetivo ´e realizar a transmiss˜ao de dados entre dois n´os que estejam fora do alcance um do outro. Desta forma os
routing das mensagens e confirma¸c˜oes de rece¸c˜ao. No caso de algum dos pontos de envio e rece¸c˜ao de dados for desligado ou removido, ´e gerada uma nova rede automaticamente (Lee and Hong, 2008).
Os dispositivos s˜ao os principais constituintes de uma WPAN, podendo-se classificar como dispositivos de tipo f´ısico ou l´ogico. Diferenciam-se trˆes n´ıveis l´ogicos (Lee et al., 2007):
• Coordinator : respons´avel por iniciar a forma¸c˜ao da rede, atribuir endere¸cos e realizar a manuten¸c˜ao do sistema. S´o pode existir um por rede, no entanto pode servir como ponte para outras redes;
• Router : permite o acesso de mais n´os `a rede, aumentando assim o alcance f´ısico. Para al´em do reencaminhamento de dados, tamb´em efetua fun¸c˜oes de monitoriza¸c˜ao e controlo. Este n´ıvel ´e opcional, dependendo da topologia da rede;
• Endpoint : processa a¸c˜oes de controlo e monitoriza¸c˜ao, atrav´es dos dispositivos que lhe est˜ao associados. Uma vez que n˜ao transmite dados, pode entrar em modo sleep, consumindo menos energia, o que lhe concebe uma longa vida operacional.
Figura 2.5 – Dispositivos compat´ıveis com o protocolo ZigBee (ZigBee Alliance).
Os dispositivos de tipo f´ısico subdividem-se em dois tipos (Obaid et al., 2014):
• RFD (Reduced Function Device): utilizam os m´ınimos recursos de hardware para implementar os protocolos, caracterizando-se por serem bastante simples. Apenas comunicam com dispositivos FFD (Coordinator ou Router ). Numa rede ZigBee assumem o tipo l´ogico de Endpoint, como por exemplo sensores, interruptores, controladores de rel´es, etc. Podem ser implementados com microcontroladores de 8 bits e uma mem´oria de programa de 6 KB;
• FFD (Full Function Device): devido `a sua complexidade, requerem um hardware mais potente para a implementa¸c˜ao dos protocolos e tamb´em um maior consumo de energia. Na tecnologia ZigBee podem assumir todos os tipos l´ogicos: Coordinators, Routers ou Endpoint, o que lhes permite comunicar com quaisquer outros membros da rede. A n´ıvel de hardware, s˜ao implementados em microcontro-ladores com mem´oria RAM e um m´ınimo de 32 KB de mem´oria de programa.
A camada de Rede possui diversas topologias. Na topologia em Estrela o Coordinator ´e encarregue de todo o controlo da rede, assumindo assim um papel central na comunica¸c˜ao direta com todos os dispositivos, localizados nos limites da rede. Toda a informa¸c˜ao transmitida tem de passar pelo n´o central. Deste modo, o Coordinator
informa¸c˜ao. Esta topologia ´e relevante quando se pretende estabelecer uma rede com grande capacidade de abrangˆencia numa ´area de grandes dimens˜oes, principalmente porque permite a f´acil expans˜ao f´ısica da rede. No caso de um dos dispositivos desaparecer, s˜ao raras as vezes em que a comunica¸c˜ao entre os restantes ´e afetada. A topologia em ´Arvore tamb´em recorre a dispositivos Router, onde se estabelece uma estrutura hier´arquica atrav´es da qual ´e executada a distribui¸c˜ao de mensagens de controlo e dados. No n´ıvel m´aximo da hierarquia localiza-se o Coordinator como o n´ucleo da rede, surgindo deste diversas ramifica¸c˜oes prim´arias que se subdividem em ramifica¸c˜oes secund´arias. Por´em, apesar das ramifica¸c˜oes secund´arias comunicarem entre si passando a informa¸c˜ao pelo Router, que posteriormente envia a informa¸c˜ao para o destinat´ario correto, as ramifica¸c˜oes prim´arias apenas comunicam entre si, transmitindo os dados para o Coordinator que se encarregar´a dos encaminhar (Varchola and Drutarovsk´y,2007).
Vantagens:
• Rede escal´avel, sendo f´acil adicionar ou remover dispositivos;
• Baixo consumo dos dispositivos;
• N˜ao existˆencia de um controlador central e distribui¸c˜ao uniforme das cargas por toda a rede.
Desvantagens:
• Elevado custo na substitui¸c˜ao e repara¸c˜ao de equipamentos compat´ıveis com o protocolo;
• A baixa transmiss˜ao de dados pode ser uma limita¸c˜ao, se o objetivo for enviar uma elevada quantidade de dados;
• Sendo uma rede sem fios, ´e mais vulner´avel a diversos ataques `a rede.
2.1.6
Z-Wave
O Z-Wave ´e um protocolo de baixa largura de banda usado maioritariamente na ´area da Dom´otica, desenvolvido pela startup dinamarquesa Zensys e mais tarde adquirido pela Sigma Designs em 2008. Tem como base de funcionamento o envio de mensagens de controlo de uma unidade central para um ou mais n´os da rede, podendo ser controlado via Internet atrav´es de um gateway ou de um dispositivo de controlo central. ´E uma tecnologia que opera na banda de radiofrequˆencia Industrial, Cient´ıfica e M´edica (ISM), sendo capaz de transmitir frequˆencias de 868,42 MHz na Europa e 908,42 MHz nos Estados Unidos, designadas para comunica¸c˜oes de dados de baixa largura de banda (Z-Wave Alliance).
O Z-Wave recorre a um algoritmo de encaminhamento que permite determinar o caminho mais r´apido para enviar as mensagens. Cada dispositivo incorpora um c´odigo, que quando se conecta ao sistema, o controlador de rede reconhece imediatamente e determina a sua localiza¸c˜ao, adicionando-o `a rede. Sempre que recebe um comando, o controlador utiliza o algoritmo para determinar como ´e que a mensagem deve ser enviada. Uma vez que este roteamento ocupa muita mem´oria, desenvolveu-se uma hierarquia entre dispositivos: os controladores, que s˜ao respons´aveis por iniciar mensagens, e os slaves, que apenas conseguem armazenar e responder `as mesmas (Robles and hoon Kim, 2010).
Existem diferentes fun¸c˜oes para cada controlador, subdividindo-se em (Reinisch et al., 2007):
• Controlador prim´ario: cont´em uma descri¸c˜ao da rede e controla os outputs. Tem como fun¸c˜ao atribuir o “Home ID” e “Node ID” aos n´os durante o processo de registo;
Figura 2.6 – Sistema dom´otico Z-Wave (SmarterHOME).
Os slaves s˜ao n´os que recebem comandos e executam uma a¸c˜ao baseada nos mesmos. N˜ao conseguem enviar informa¸c˜oes diretamente para outros slaves ou controladores, a menos que sejam solicitados a fazˆe-lo por um comando. Os routing slaves podem enviar mensagens n˜ao solicitadas para outros n´os na rede e armazenar rotas est´aticas de maneira a enviar mensagens para um n´umero limitado de n´os. Os enhanced slaves tˆem a mesma funcionalidade e s˜ao manipulados de igual modo na rede. A diferen¸ca ´e que estes possuem um rel´ogio de tempo real e uma EEPROM para armazenar dados de aplica¸c˜ao (Reinisch et al., 2007).
Com o objetivo de ser poss´ıvel a distin¸c˜ao entre redes Z-Wave, utiliza-se um identifi-cador ´unico de 32 bits, designado “Home ID”. Este ´e referente ao ID que o controlador
prim´ario atribui ao n´o durante o processo de inclus˜ao. Inicialmente todos os slaves da rede ter˜ao um “Home ID” definido como zero, no caso de um n´o ser atribu´ıdo a uma rede diferente ´e necess´ario exclu´ı-lo previamente da rede antiga. O “Node ID” ´e um n´umero de identifica¸c˜ao ou endere¸co de 8 bits que ´e atribu´ıdo a cada dispositivo durante o processo de inclus˜ao, sendo ´unico apenas dentro da rede definida por um “Home ID”. Para cada rede existe um total de 232 n´os dispon´ıveis, ou seja, um n´o para o controlador prim´ario e 231 para slaves (Rathnayaka et al., 2011).
Vantagens:
• Utiliza a infraestrutura existente;
• Instala¸c˜ao r´apida e simples, sem altera¸c˜oes estruturais, substituindo os interruptores existentes por dispositivos Z-Wave.
Desvantagens:
• Transmiss˜ao de ´audio apenas ´e poss´ıvel no melhor dos casos, onde a largura de banda ´e m´axima (40 kbits/s). N˜ao sendo poss´ıvel transmiss˜ao de v´ıdeo;
• Limita¸c˜ao do alcance e cobertura do ambiente, sendo necess´ario o uso de cabos ou repetidores.
2.1.7
Bluetooth
O Bluetooth ´e uma tecnologia standard sem fios concebida inicialmente pela empresa Ericson, em 1994, como alternativa aos cabos de dados RS-232. Permite a liga¸c˜ao e troca de dados a curtas distˆancias atrav´es de ondas r´adio de baixa potˆencia de transmiss˜ao entre dispositivos pr´oximos uns dos outros, formando assim uma rede pessoal denominada PAN (Personal Area Network ). Mais tarde, em 1998, as empresas Ericsson, Intel, IBM, Nokia e Toshiba uniram for¸cas para criar a Bluetooth SIG (Special Interest Group), respons´avel por desenvolver novas especifica¸c˜oes que
conhecidas como piconets. Neste tipo de rede, um dispositivo mant´em o papel de master, enquanto os restantes s˜ao slaves. Apesar de n˜ao haver um limite para o n´umero total de slaves, s´o podem ser ativos no m´aximo sete slaves num determinado momento, ficando os restantes num estado estacion´ario. O n´umero m´aximo de slaves estacion´arios, com endere¸camento direto atrav´es do Parked Slave Address, ´e de 255 por piconet. Por´em tamb´em ´e poss´ıvel realizar o endere¸camento indireto atrav´es do endere¸co espec´ıfico do dispositivo Bluetooth, permitindo assim uma infinidade de slaves estacion´arios. Quando dois dispositivos entram no alcance de comunica¸c˜ao, tentam estabelecer uma liga¸c˜ao. Caso n˜ao exista nenhuma piconet dispon´ıvel, o dispositivo que iniciou a comunica¸c˜ao torna-se master e o outro slave. As fun¸c˜oes de master, slave ou bridge s˜ao tempor´arias, podendo qualquer dispositivo obter uma destas fun¸c˜oes. O master seleciona o tempo, frequˆencia, sequˆencia de frequˆencia e a ordem de polling dos slaves. Para um slave entrar na rede de um master ´e necess´ario trocar informa¸c˜oes de data e endere¸co. Um dispositivo bridge interconecta duas ou mais piconets para comunica¸c˜ao ad hoc, comunicando com todas as redes conectadas, no entanto s´o pode comunicar com uma piconet de cada vez. Um dispositivo bridge pode ser um slave em todas as piconets a que est´a conectado, ou ent˜ao ser um master numa piconet e um slave nas outras. A interconex˜ao de v´arias piconets atrav´es de bridges resulta na forma¸c˜ao de uma Bluetooth scatternet (McDermott-Wells, 2004).
O Bluetooth possui uma arquitetura protocolar de camadas, composta por protocolos: core, de substitui¸c˜ao de cabo, de controlo de telefonia e protocolos adotados. O sistema core ´e composto por v´arios elementos, entre eles, transmissor de RF, banda base e conjuntos de protocolos que permitem aos dispositivos conectarem-se e trocar uma vasta gama de classes de dados. No core localizam-se os protocolos cruciais
Figura 2.7 – Sensor de movimento compat´ıvel com Bluetooth (Amazon).
para o funcionamento de uma rede Bluetooth (Rathi, 2000):
• Bluetooth Radio: respons´avel pela modula¸c˜ao e desmodula¸c˜ao dos dados para transmiss˜ao e rece¸c˜ao no ar. ´E a camada f´ısica referente ´as antenas;
• Link Control Protocol (LCP): respons´avel pelo esquema de endere¸camento, formato de pacotes, sincroniza¸c˜ao e controlo de energia;
• Link Manager Protocol (LMP): respons´avel pela configura¸c˜ao e controlo da liga¸c˜ao entre dois dispositivos;
• Logical Link Control and Adaptation Protocol (L2CAP): empregue para multiplexar v´arias conex˜oes l´ogicas entre dois dispositivos atrav´es de diferentes protocolos de n´ıvel superior. Fornece remontagem e segmenta¸c˜ao de pacotes no ar;
• Service Discovery Protocol (SDP): permite que um dispositivo descubra servi¸cos oferecidos por outros dispositivos e os parˆametros associados ao mesmo.
Na maior parte das vezes as trˆes camadas mais baixas do sistema, radio, link control e link manager, s˜ao agrupadas num subsistema designado de controlador. Esta
adotados s˜ao definidos por outras organiza¸c˜oes de cria¸c˜ao de padr˜oes e incorporados no conjunto de protocolos do Bluetooth, permitindo assim a codifica¸c˜ao de protocolos apenas quando necess´ario. Entre os protocolos inclu´ıdos encontram-se o Point-to-Point (PPP), TCP/IP/UDP e Object Exchange Protocol (OBEX) (Rathi,2000).
Figura 2.8 – M´odulo compat´ıvel com Bluetooth, para controlo da ilumina¸c˜ao de uma casa (Amazon).
Vantagens:
• Solu¸c˜ao vi´avel de baixo custo;
• Suporte para comunica¸c˜ao de voz e dados;
Desvantagens:
• Curto alcance;
• Limita¸c˜ao no n´umero de dispositivos conectados ao mesmo tempo; • Perda de comunica¸c˜ao em certas condi¸c˜oes;
• Baixo n´ıvel de seguran¸ca relativamente a tecnologias como o Wi-Fi.
2.1.8
Wi-Fi
Wi-Fi ´e o nome dado pela Wi-Fi Alliance ao conjunto de padr˜oes IEEE 802.11, definido em 1999 pelo IEEE (Institute of Electrical and Electronics Engineers) como uma norma para redes locais sem fio designada “Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications”. A arquitetura consiste em v´arios componentes que interagem entre si de forma a promover uma rede local sem fio com suporte `a mobilidade de esta¸c˜oes de modo transparente para as camadas superiores (Hiertz et al.,2010).
Todos os dispositivos que se ligam a uma rede Wi-Fi, sejam m´oveis, port´ateis ou fixos, s˜ao designados esta¸c˜oes wireless (STAs). Quando duas ou mais STAs se conectam, formam um conjunto de servi¸cos b´asicos (BSS), uma estrutura b´asica da arquitetura celular de uma rede Wi-Fi, que s˜ao controlados diretamente por uma ´
unica fun¸c˜ao de coordena¸c˜ao, a qual determina quando uma esta¸c˜ao pode transmitir e receber dados. Existem dois modos de configura¸c˜ao de uma rede no padr˜ao 802.11 (Broch et al., 1998):
• Modo Ad-Hoc: modo mais simples, onde as STAs comunicam diretamente entre si sem ajuda de uma infraestrutura centralizada, seguindo o modelo peer-to-peer. Devido `a facilidade de criar este modo de rede, pode-se tornar ´
util em situa¸c˜oes que exijam uma r´apida configura¸c˜ao de rede em ´areas que n˜ao possuam uma infraestrutura, como por exemplo: locais de emergˆencia e zonas de combate;
qual permite a comunica¸c˜ao entre APs. O conjunto de APs com os sistemas de distribui¸c˜ao formam o ESS (Extended Service Set).
O sistema de distribui¸c˜ao permite mobilidade numa rede Wi-Fi, atrav´es de um m´etodo de rastreio de localiza¸c˜ao f´ısica de STAs, garantindo assim que as frames sejam entregues ao AP associado `a STA destinada. Isto significa que um cliente wireless pode-se deslocar livremente dentro da ´area de cobertura do ESS, mantendo a conex˜ao sem interrup¸c˜oes.
Figura 2.9 – Componentes t´ıpicos de uma rede Wi-Fi (CertificationKits).
De forma a que um dispositivo seja compat´ıvel com Wi-Fi, este necessita da capacida-de capacida-de procurar recapacida-des que estejam dispon´ıveis, sendo direcionado para procurar num ou v´arios canais. Os pontos de acesso geram beacons com a finalidade de transmitir a sua respetiva rede a qualquer dispositivo Wi-Fi que se encontre no seu alcance. Os beacons de um AP s˜ao normalmente enviados a cada 100 ms, por´em no caso de uma solicita¸c˜ao de sondagem ativa de uma STA, o AP responde imediatamente (Digi International, 2008).
Uma rede Wi-Fi pode operar numa das seguintes bandas de frequˆencia (Ferro and Potort`ı, 2005):
aproximadamente de 20 a 22 MHz, operando na banda ISM. ´E uma frequˆencia muito concorrida, devido `a variedade de dispositivos que operam nela, dos quais dispositivos Bluetooth, telefones, entre outros;
• 5 GHz: composta por 13 canais, cada um com uma largura de banda aproxima-damente de 20 MHz, que opera na banda U-NII. Esta banda ´e menos requisitada que a de 2.4 GHz, por´em pode vir a mudar `a medida que o mercado continua a crescer.
Figura 2.10 – M´odulo e lˆampadas compat´ıveis com Wi-Fi (Wi-Fi Alliance,a).
De modo a responder ao crescente n´umero de produtos e sistemas de casas inteligentes, a Wi-Fi Alliance criou o Wi-Fi CERTIFIED Home Design, um programa de certifica¸c˜ao que permite aos construtores de casas oferecerem redes Wi-Fi embutidas, com base no tamanho da nova casa, compartimentos e composi¸c˜ao da parede, de forma a abranger toda a casa rec´em-constru´ıda. Deste modo n˜ao h´a necessidade de comprar e instalar novos pontos de acesso Wi-Fi ap´os a constru¸c˜ao da casa, o que possibilita uma crescente variedade de futuros dispositivos e sistemas dom´esticos inteligentes (Wi-Fi Alliance, b).
Figura 2.11– M´aquina de caf´e compat´ıvel com Wi-Fi (Wi-Fi Alliance,a).
Figura 2.12 – Aquecedor inteligente compat´ıvel com Wi-Fi (Wi-Fi Alliance,a).
Vantagens:
• Baixo custo de instala¸c˜ao;
• Compatibilidade com uma vasta gama de dispositivos; • Proporciona elevada mobilidade e liberdade de movimento.
Desvantagens:
• Baixo n´ıvel de seguran¸ca;
• Elevada interferˆencia na transmiss˜ao do sinal (distˆancia ao AP, paredes, etc).
2.1.9
Insteon
A Insteon ´e uma tecnologia dom´otica, criada pela empresa Smartlabs em 2005, que permite automatizar dispositivos eletr´onicos dom´esticos simples, atrav´es da rede
el´etrica, protocolo de radiofrequˆencia ou ambos, transmitindo na frequˆencia de 915 MHz. No caso da comunica¸c˜ao ser feita atrav´es da rede el´etrica, s˜ao utilizados os princ´ıpios descritos pelo protocolo X10. Aplica a arquitetura peer-to-peer como topologia de rede, onde todos os dispositivos s˜ao definidos como peers, possibilitando assim que cada dispositivo possa transmitir, receber e repetir qualquer mensagem do protocolo Insteon, sem necessidade de um software de encaminhamento complexo ou controlador central. Nesta tecnologia os dispositivos utilizam simulcast em detrimento de encaminhamento, evitando assim a necessidade de armazenar o estado de forma a tornar poss´ıvel a comunica¸c˜ao multi-hop (Insteon, 2013).
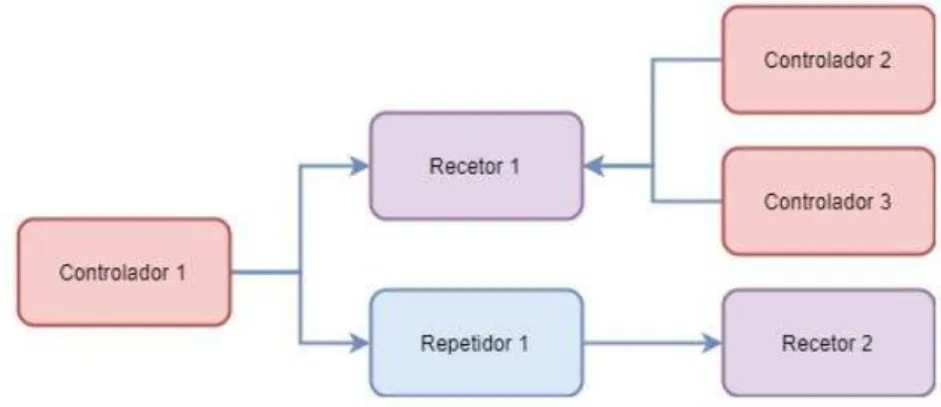
Figura 2.13 – Dispositivos Insteon numa rede peer-to-peer.
A Figura2.13descreve o modo de funcionamento dos dispositivos Insteon numa rede peer-to-peer, onde o controlador 1 envia mensagens para o recetor 1 e repetidor 1. ´E poss´ıvel ter mais do que um controlador a comunicar com um ´unico recetor, tal como se verifica na ilustra¸c˜ao, em que os controladores 2 e 3 comunicam com o recetor 1. O repetidor 1 ´e respons´avel por repetir a mensagem enviada pelo controlador 1, de forma a que esta chega ao seu destino, neste caso o recetor 2. Atrav´es deste esquema ´e poss´ıvel confirmar que quanto maior for o n´umero de dispositivos ligados na rede, maior ´e a for¸ca do sinal na mesma.
A n´ıvel de seguran¸ca ´e poss´ıvel controlar as liga¸c˜oes, uma vez que o Insteon exige aos utilizadores terem conhecimento do ID dos pr´oprios dispositivos, de modo a criar liga¸c˜oes exclusivas. O firmware dos dispositivos impede que estes consigam identificar outros dispositivos, a n˜ao ser que o utilizador pressione fisicamente um
Figura 2.14 – Dispositivos dom´oticos Insteon (TechHive).
Vantagens:
• A adi¸c˜ao de dispositivos fortalece a rede, em vez de a sobrecarregar.
Desvantagens:
2.2
Solu¸c˜
oes comerciais
Neste sec¸c˜ao s˜ao apresentadas algumas das solu¸c˜oes existentes no mercado, sendo que a maioria integra uma componente hardware e software. No entanto tamb´em existem solu¸c˜oes espec´ıficas, que integram apenas um dos componentes, como por exemplo as interfaces gr´aficas, tais como openHab, Home Assistant, Domoticz, etc. Este tipo de interfaces permitem ao utilizador obter informa¸c˜oes acerca dos dispositivos dom´oticos da sua pr´opria habita¸c˜ao, bem como controlar/monitorizar os mesmos.
2.2.1
openHab
O openHAB ´e uma plataforma open source que aborda uma grande diversidade de dispositivos e tecnologias de rede na ´area da automa¸c˜ao residencial. Baseia-se no framework Eclipse SmartHome, completamente escrita em Java e utiliza o Apache Karaf juntamente com o Eclipse Equinox, agrupando tudo no servidor HTTP Jetty (openHAB). De modo a fornecer recursos e regras de automa¸c˜ao abrangentes com uma interface uniforme, esta tecnologia abstrai-se de dispositivos espec´ıficos atrav´es do conceito de itens. Um item ´e uma vari´avel real ou virtual de um dispositivo ou servi¸co, com um identificador exclusivo ou endere¸co IP espec´ıfico, que possui um estado e pode receber comandos (Smirek et al., 2014).
O openHAB ´e constitu´ıdo por dois canais de comunica¸c˜ao internos diferentes, o Event Bus ass´ıncrono e um reposit´orio de estados. O Event Bus ´e o servi¸co b´asico onde todos os pacotes de dados, que n˜ao alteram o comportamento do estado, informam outros pacotes sobre eventos e s˜ao atualizados por outros pacotes acerca de eventos externos. Os pacotes podem tamb´em alterar e acionar itens atrav´es de comandos, sendo posteriormente divulgada a altera¸c˜ao no Event Bus por mensagens de atualiza¸c˜ao de estado. Os valores das vari´aveis s˜ao armazenados no sistema num reposit´orio de estados, simultaneamente com os nomes das vari´aveis. O reposit´orio ´e constantemente sincronizado com dispositivos conectados e pode ser acedido por
Figura 2.15 – Interface da plataforma openHAB (MySensors).
qualquer componente que necessite de informa¸c˜oes relativamente ao estado do dispo-sitivo (Smirek et al., 2014).
A n´ıvel de interfaces de utilizador (UI) o openHAB concede uma configura¸c˜ao textual gen´erica, onde as diferentes p´aginas e respetivo conte´udo s˜ao definidas no arquivo Sitemap. Pretende-se que o modelo se adeque a diversos tipos de interfaces, de forma a que o utilizador n˜ao precise configurar cada uma delas no caso de utilizar m´ultiplas interfaces. Embora esta plataforma seja independente do fornecedor e a interface de utilizador possa ser implementada acima de qualquer sistema, existem quatro interfaces padr˜ao dispon´ıveis. A UI padr˜ao, que pode ser acedida atrav´es de qualquer navegador web para controlar remotamente o sistema, recorrendo ao arquivo do Sitemap para renderizar as p´aginas. Nesta interface os utilizadores podem construir blocos HTML personalizados e criar o seu pr´oprio design. Existem tamb´em duas UI nativas para dispositivos m´oveis que executam sistemas Android ou iOS. Visto que ambos s˜ao open source, ´e poss´ıvel modificar o seu design e conte´udo (Hosek et al.,
2.2.2
Home Assistant
O Home Assistant ´e uma plataforma open source de automa¸c˜ao residencial que permite monitorizar, automatizar e controlar v´arios dispositivos sem recorrer ao uso de uma cloud. O back-end ´e desenvolvido em Python e comunica atrav´es do Websocket com o front-end, desenvolvido com Polymer. E uma tecnologia´ projetada para ser compat´ıvel com v´arios sistemas operativos, entre eles, Linux, Windows e macOS, e diferentes tipos de hardware, desde computadores cl´assicos a computadores de placa ´unica, como o Raspberry Pi, telem´oveis e tablets. A Figura
2.16 representa uma vis˜ao geral da arquitetura central do Home Assistant. Nela ´e poss´ıvel identificar quatro elementos cruciais (Home Assistant, a):
• Event Bus: permite que qualquer componente “dispare” ou “escute” eventos; • State Machine: acompanha o estados dos componentes e dispara um evento
de mudan¸ca de estado, sempre que este for alterado;
• Service Registry : respons´avel por registar e invocar servi¸cos que se encontrem dispon´ıveis;
• Timer : notifica o Event Bus sobre o decorrer do tempo em segundos.
2.2.3
Calaos
O Calaos ´e um projeto open source para casas inteligentes totalmente escrito em C++. O software ´e composto por seis componentes principais (Calaos Wiki):
• Calaos Server : servidor daemon que exporta o estado da casa atrav´es de um ficheiro JSON. Pode gerir v´arios componentes e protocolos de hardware, entre eles: X10, Lua, HTTP/Websocket API, Squeezebox e GCE Electronics Eco Devices;
• Calaos Home: interface de ecr˜a t´atil, desenvolvida em EFL (Extended Fortran Language), que permite controlar e monitorizar a casa;
• Calaos WebApp: interface baseada na web implementada em HTML5, Angular JS e Bootstrap;
• Calaos OS: Distribui¸c˜ao Linux baseada em OpenEmbedded, pr´e-carregada com o Calaos Server, Calaos Home, Calaos WebApp e outras ferramentas relevantes;
• Calaos Mobile: Aplica¸c˜ao Qt5/QML para tablets e smartphones, Android ou iOS, que permite o controlo remoto. No entanto, cont´em um subconjunto de fun¸c˜oes limitado em rela¸c˜ao ao Calaos Home;
• Calaos Installer : permite configurar o servidor remotamente, atrav´es da adi¸c˜ao, remo¸c˜ao ou modifica¸c˜ao das entradas/sa´ıdas do PC, em vez de editar arquivos de configura¸c˜ao manualmente.
A Figura 2.17 representa a interface para telem´ovel com sistema operativo iOS, onde ´e poss´ıvel retirar algumas das opera¸c˜oes poss´ıveis com este tipo de tecnologia, como por exemplo: ligar/desligar todas as luzes da casa ou de um compartimento espec´ıfico, estabelecer uma determinada temperatura ambiente e controlar a intensi-dade luminosa de uma lˆampada.
Figura 2.17 – Aplica¸c˜ao Calaos Mobile (Hecky).
2.2.4
Domoticz
A Domoticz ´e uma plataforma open source para casas inteligentes dispon´ıvel para v´arios sistemas operativos como Windows, Linux e macOS. Uma vez que se caracteriza como uma aplica¸c˜ao leve e consome poucos recursos do sistema converte-se numa solu¸c˜ao interessante quando combinado com sistemas embebidos low cost, como por exemplo o Raspberry Pi. Inclui um servidor web embebido pr´oprio, escrito em C++ para uma execu¸c˜ao eficiente e evitar dependˆencias. A sua interface de utilizador web ´e responsiva em HTML5 e adapta-se automaticamente a v´arios tipos de dispositivos,
de gr´aficos respetivos a cada sensor, de forma a proporcionar ao cliente uma f´acil gest˜ao do consumo da casa. Todos os alarmes e notifica¸c˜oes do sistema podem ser enviados para qualquer dispositivo m´ovel. A Domoticz oferece tamb´em suporte para diversos protocolos, entre eles o X10 e Z-Wave (Domoticz, 2015).
Figura 2.18 – Interface da plataforma Domoticz (Sourceforge).
2.2.5
Sonoff
O Sonoff ´e um switch inteligente Wi-Fi, produzido pela ITEAD, que fornece aos utilizadores um controlo inteligente da casa, conectando-se a uma vasta gama de aparelhos, sendo que o switch mais b´asico possui uma potˆencia m´axima de 2200 W. Transmite dados para a cloud atrav´es do router Wi-Fi, que permite aos clientes controlar remotamente todos os aparelhos conectados, atrav´es da aplica¸c˜ao m´ovel iOS/Android eWeLink, empregando o servidor global da Amazon AWS como servidor (ITEAD Wiki, b).
Figura 2.19 – Dispositivo dom´otico Wi-Fi Sonoff (ITEAD).
A eWeLink permite controlar e gerir dispositivos inteligentes de diferentes marcas com uma ´unica aplica¸c˜ao, n˜ao existindo um limite para a quantidade de aparelhos que se pode adicionar `a mesma, embora geralmente se usem no m´aximo 150. Este aplicativo oferece v´arias fun¸c˜oes b´asicas como (ITEAD Wiki, a):
• Ligar/desligar remotamente dispositivos e consultar o seu estado simultaneamente;
• Estabelecer temporiza¸c˜oes: ´e poss´ıvel estabelecer temporiza¸c˜oes ´unicas, que executam a a¸c˜ao apenas uma vez, e temporiza¸c˜oes repetitivas, que executam v´arias vezes a mesma a¸c˜ao. Cada dispositivo suporta no m´aximo oito temporiza-¸c˜oes diferentes. Os temporizadores predefinidos funcionam mesmo no caso da rede Wi-Fi n˜ao estar dispon´ıvel, desde que o dispositivo se mantenha ligado;
• Partilhar controlo: o propriet´ario de um dispositivo pode compartilh´a-lo com outros utilizadores, de forma a que todos o possam controlar;
• Gest˜ao de grupos: no caso da existˆencia de v´arios dispositivos ´e poss´ıvel configurar e agrup´a-los em diferentes grupos, permitindo enviar uma a¸c˜ao ao mesmo tempo para todos os dispositivos pertencentes ao mesmo grupo;
Figura 2.20 – Interface da aplica¸c˜ao eWeLink (ITEAD).
2.2.6
MEO Smart Home
O pacote MEO Smart Home ´e uma plataforma, criada pela empresa MEO, como uma resposta `as escassas solu¸c˜oes existentes no mercado. O pacote inicial ´e constitu´ıdo por: um telecomando, sensor de abertura de portas e janelas, uma cˆamara de v´ıdeo, sirene interior, um detetor de fumo, uma central de controlo, placa e autocolantes dissuasores. Existe ainda a possibilidade de adquirir mais dispositivos separadamente, que se adaptem `as necessidades de cada utilizador, como lˆampadas e tomadas inteligentes, interruptores sem fios, sensores de humidade e temperatura. Toda a gama de dispositivos pode ser gerida e controlada atrav´es de uma plataforma web ou de uma aplica¸c˜ao m´ovel para Android e iOS (MEO).
Figura 2.21 – Kit Smart Home da MEO (Pinto,2017).
A interface encontra-se dividida em seis m´odulos: seguran¸ca, v´ıdeo, sistema, equipa-mentos, dom´otica e defini¸c˜oes. A n´ıvel de seguran¸ca ´e poss´ıvel escolher trˆes perfis diferentes: “Dete¸c˜ao desativada”, onde n˜ao s˜ao emitidos quaisquer tipo de alertas, com exce¸c˜ao do sensor de fumo, “Dete¸c˜ao personalizada”, podendo-se escolher quais os sensores que ficam ativos, e o perfil “Dete¸c˜ao ativada”, no qual todos os sensores ficam ativos. Tamb´em ´e poss´ıvel consultar todos os alertas emitidos, para quem foram enviados e a data dos mesmos. O m´odulo sistema cont´em informa¸c˜oes acerca do estado da central e respetivos acess´orios, bem como um hist´orico de notifica¸c˜oes de eventos que ocorreram no sistema. No menu de v´ıdeo o cliente pode consultar a respetiva casa, em tempo real, atrav´es da cˆamara de v´ıdeo HD, ligada `a rede por cabo ou via wireless. Este m´odulo permite: grava¸c˜ao de v´ıdeo at´e 24 horas, consultar grava¸c˜oes dos ´ultimos 30 dias, dete¸c˜ao de movimento atrav´es do sensor
Ao n´ıvel das defini¸c˜oes, o utilizador pode definir quais os equipamentos que fazem parte do perfil personalizado, ativar ou desativar a a¸c˜ao da sirene, instalar novos acess´orios, configurar alertas, n´umero de telem´ovel e email (Pinto,2017).
2.2.7
HomeKit
O HomeKit ´e uma framework anunciada em 2014, desenvolvida pela Apple para o sistema operativo iOS, que permite aos utilizadores configurar o iPhone de forma a comunicar, configurar e controlar dispositivos inteligentes. Qualquer utilizador pode controlar dispositivos inteligentes com a aplica¸c˜ao, no entanto n˜ao ´e poss´ıvel a integra¸c˜ao de dispositivos sem habilita¸c˜ao para o HomeKit. Os fabricantes de dispositivos compat´ıveis com o HomeKit precisam de comprar uma licen¸ca e serem aprovados pela Apple (Apple, a).
Na aplica¸c˜ao ´e poss´ıvel dividir os v´arios dispositivos pelas v´arias divis˜oes da casa e por andares. Estas divis˜oes permitem que os acess´orios sejam organizados e controlados com base na sua localiza¸c˜ao real dentro de uma casa. Os andares permitem que divis˜oes, tipicamente pr´oximas umas das outras, sejam agrupadas, organizadas e controladas. Um acess´orio ´e um dispositivo f´ısico, como uma luz ou cˆamara, que comunica com o iCloud ou com um servidor, de modo a responder ou receber instru¸c˜oes, e fornecer atualiza¸c˜oes do seu estado. Esta comunica¸c˜ao ocorre diretamente ou atrav´es de um dispositivo iOS, como Apple TV ou iPad que funciona como um controlador central (Apple, a).
O HomeKit possu´ı como principal caracter´ıstica diferenciadora, o facto de apenas necessitar da aplica¸c˜ao m´ovel e de equipamentos com o selo “Works with Apple HomeKit”, n˜ao sendo necess´ario a utiliza¸c˜ao de um controlador central/hub espec´ıfico,
Figura 2.22 – Interface da aplica¸c˜ao HomeKit (Apple,b).
visto que produtos da Apple como o iPad, podem funcionar como tal. O uso de um controlador central ´e necess´ario quando se tem como objetivo temporiza¸c˜ao de eventos ou controlo remoto. A aplica¸c˜ao ´e respons´avel por detetar dispositivos compat´ıveis na rede Wi-Fi e por Bluetooth, sendo tamb´em poss´ıvel a integra¸c˜ao de um gateway Insteon, o que torna os dispositivos desta tecnologia compat´ıveis com o HomeKit (Gebhart and Wollerton, 2016).
2.3
Conclus˜
ao das tecnologias estudadas
Atrav´es do estudo feito, ´e poss´ıvel afirmar que existem v´arios benef´ıcios associados `a dom´otica, como por exemplo, a possibilidade de controlo da ilumina¸c˜ao, estores e equipamentos eletr´onicos, assim como monitoriza¸c˜ao da habita¸c˜ao atrav´es de sensores de temperatura, humidade, etc. No entanto, apesar destes benef´ıcios, a dom´otica tem tido um papel pouco relevante no mercado. Isto deve-se a fatores econ´omicos, fatores humanos, ligados `a apetˆencia por este tipo de tecnologias, e `a
elevado custo. Tendo em considera¸c˜ao as solu¸c˜oes dom´oticas estudadas e as tendˆencias do mercado, conclui-se que a solu¸c˜ao mais indicada, seria um sistema sem fios de baixo custo. Deste modo, apresenta-se uma proposta para um sistema dom´otico no Cap´ıtulo 3.