UNIVERSIDAD AUTÓNOMA DE BAJA CALIFORNIA FACULTAD DE INGENIERÍA MEXICALI
SISTEMAS LINEALES 1
Dr. Lars Lindner
Contenido
1 Introducción 4
Control en bucle abierto y en bucle cerrado ... 4
1.1 Términos de control ... 7
1.2 Ejemplos de aplicaciones de sistemas de control ... 9
1.3 2 Medios para Representación 11 Elementos del diagrama funcional o diagrama de flujo de señales ... 11
2.1 2.1.1 Bloque de transferencia y línea de acción ... 11
2.1.2 Elementos de interconexión ... 14
Estructuras del diagrama funcional y simplificaciones ... 17
2.2 2.2.1 Estructura en serie ... 17
2.2.2 Estructura en paralela ... 17
2.2.3 Estructura en bucle ... 21
2.2.4 Ecuación diferencial con bloques de transferencia ... 25
Cálculo de bucles de control con elementos proporcional ... 27
2.3 Conversión de diagramas funcionales ... 30
2.4 2.4.1 Reglas para la conversión ... 30
2.4.2 Tabla de las reglas de conversión... 31
2.4.3 Ejemplos de aplicación ... 34
3 Métodos Matemáticos 36 Normalización de ecuaciones (estandarización) ... 36
3.1 Linealización de elementos del bucle de control ... 39
3.3.3 Sistema de segundo orden (Elemento PT2) ... 55
La transformación de Laplace ... 66
3.4 3.4.1 Transformaciones matemáticas ... 66
3.4.2 Dominio original y dominio de imagen ... 67
3.4.3 Transformación y transformación inversa de Laplace ... 69
Funciones de prueba ... 72
3.5 3.5.1 El impulso unitario δ(t) ... 72
3.5.2 El escalón unitario σ(t) ... 73
3.5.3 La rampa unitaria ρ(t) ... 76
3.5.4 Función armónica ... 79
Aplicación de la transformación de Laplace ... 80
3.6 3.6.1 Linealidad ... 80
3.6.2 Teoremas de desplazamiento ... 81
3.6.3 Teorema de similitud ... 86
3.6.4 Teorema de convolución ... 87
3.6.5 Teorema de diferenciación e integración ... 89
3.6.6 Teoremas de valor limite... 91
Función de transferencia ... 95
3.7 3.7.1 Descomposición en fracciones parciales ... 96
3.7.2 Ecuación característica y diagrama polo-raíces ... 97
3.7.3 Solución de ecuaciones diferenciales lineales con coeficientes constantes con la transformación de Laplace ... 100
Respuesta en frecuencia de elementos de transferencia ... 103
3.8 3.8.1 Respuesta en frecuencia ... 103
3.8.2 Respuesta en frecuencia y función de transferencia ... 108
3.8.3 Respuesta en frecuencia y diagrama de Bode ... 109
3.8.4 Respuesta en frecuencia y diagrama de Nyquist ... 119
3.8.5 Respuesta en frecuencia y respuesta al escalón ... 121
1
Introducción
Control en bucle abierto y en bucle cerrado
1.1
Frecuentemente se deben implementar técnicas de bucle cerrado o abierto en sistemas de
control, en las cuales ciertas magnitudes del sistema tienen un comportamiento ordenado. En
casos simples se supone que las magnitudes son constantes, aunque afectan perturbaciones al
sistema. Estas tareas generalmente se resuelven con un sistema de control en bucle abierto o en
bucle cerrado. A continuación se explicaran y compararan dichos métodos.
El control en bucle cerrado es un proceso, en donde se mide en forma continua una magnitud, la
variable controlada, y se compara con otra magnitud, la variable de referencia. Con el resultado
de la comparación se influye la variable controlada, tal que esta se adapta a la variable de
referencia. El sistema completo es conocido como bucle de control.
Ejemplo 1.1: Control en bucle abierto
El control en bucle abierto (lazo abierto) de la temperatura interior 𝑇𝑖 de una habitación es
dependiente de la temperatura exterior 𝑇𝑎. Un elemento de control regula el flujo de energía para
la habitación en función de la temperatura exterior actual 𝑇𝑎.
Fuente de calor o electricidad
Válvula, Tiristor, Disruptor
Habitación para calentar con
calefacción
i
T
Elemento de
control M
Transformador de medida Medidor de temperatura
exterior
a
El sistema es un control en bucle abierto, debido a que no se está midiendo la variable controlada
(temperatura interior 𝑇𝑖). Se controla la temperatura de la habitación 𝑇𝑖 en función de la
temperatura exterior 𝑇𝑎, la magnitud más importante en un sistema de calefacción. La
característica más importante en un bucle de control abierto es el modo de acción abierto, la
temperatura interior no influye al flujo de energía.
Ejemplo 1.2: Control en bucle cerrado
El control en bucle cerrado (lazo cerrado) de la temperatura interior 𝑇𝑖 fijo a una temperatura
prescrita 𝑇𝑠. Se regula el flujo de energía en función de la diferencia entre la temperatura interior
𝑇𝑖 y la temperatura prescrita 𝑇𝑠. Por lo tanto la cadena de acción está cerrada.
Fuente de calor o electricidad
Válvula, Tiristor, Disruptor
Habitación para calentar con
calefacción
Comparador y
controlador M
Medidor de temperatura
interior
i
T
Transformador de medida
Valor prescrito
s
T
Figura 2: Esquema tecnológico de un control cerrado de temperatura
Los controles en bucle abierto no consideran todas las perturbaciones. El Ejemplo 1.1 solo
considera cambios en la temperatura exterior, pero no perturbaciones en el flujo de energía. Sin
embargo controles en bucle abierto generalmente reaccionan más rápido a perturbaciones. Si se
disminuye la temperatura exterior, el control interviene antes que la perturbación baje la
Tabla 1: Características de controles en bucle abierto y cerrado
Característica Control en bucle abierto Control en bucle cerrado
Cadena de acción: Abierta Cerrada
Medición y comparación de la
magnitud regulada: No Si
Reacción a perturbaciones en
general:
Solo se reacciona a
perturbaciones, que se están
midiendo.
Impide todas las
perturbaciones, que actúan
sobre el sistema.
Reacción a perturbaciones en el
tiempo:
Reacciona rápido, porque se
miden directo las
perturbaciones.
Solo reacciona cuando se
cambia la diferencia entre valor
prescrito e instantáneo.
Esfuerzo técnico:
Alto esfuerzo, si se debe
considerar muchas
perturbaciones. Bajo esfuerzo,
si no aparece ninguna
perturbación.
Bajo esfuerzo: Medición de la
variable controlada,
comparación del prescrito e
instantáneo, amplificación de la
potencia.
Comportamiento en sistemas
inestables:
Control en bucle abierto con
sistemas inestables es
inutilizable.
Sistemas inestables requieren
control en bucle cerrado.
Tabla 2: Ventajas y desventajas de controles en bucle abierto y cerrado
Control en bucle abierto Control en bucle cerrado
Ventajas
Construcción más simple
Si el sistema controlado es estable, no hay problema de estabilidad Conveniente cuando la medición de
salidas es complicado o costoso En general menos costoso
Compensa perturbaciones o cambios de los parámetros del sistema continuamente
Exactitud en la igualación de los valores reales y prescritos
Desventajas
No compensa perturbaciones o cambios de los parámetros del sistema, la salida puede ser diferente a la deseada
Requiere recalibración periódica del sistema
Un sistema estable se puede hacer inestable por cerrar el bucle Construcción más compleja
Términos de control
1.2
La meta de controles técnicos es la mejora del comportamiento de magnitudes físicas en el
tiempo, por ejemplo la tensión eléctrica, la potencia, la velocidad de giro, la presión y la
temperatura.
El sistema controlado es la parte en un sistema técnico, que se quiere influir. En el Ejemplo 1.1 el
sistema controlado consiste en la calefacción y la habitación para calentar. La variable de entrada
del sistema controlado es la variable de control 𝑦 (flujo de calor), la magnitud para controlar se
denomina variable controlada 𝑥 y en este caso corresponde a la temperatura interior 𝑇𝑖.
Sistema controlado
Variable de control Variable controlada
Variable de perturbación
y x
z
Figura 1: Sistema controlado con entrada y salida
Se registra la variable controlada 𝑥 en el punto de medición y se compara con la variable de
referencia 𝑤 calculando la diferencia. Se define la variable de referencia al control desde fuera, la
variable controlada debe seguir la variable de referencia. La diferencia:
𝑥𝑑= 𝑤 − 𝑥 ( 1 )
se denomina variable de error. Las perturbaciones se nombran con 𝑧, ellasactúan en puntos de
perturbaciones e influyen la variable controlada 𝑥. Una meta importante del control es suprimir la
influencia de las perturbaciones a la variable controlada. Si ocurre una disminución de la variable
equipo final de control, la variable de control 𝑦 , actúa en el punto de control del sistema
controlado. El sistema controlado se encuentra entre el punto de control y el equipo de medición.
El sistema de control consiste del equipo de medición, el comparador, el controlador y el equipo
final de control; es decir todos los equipos, excepto el sistema controlado, forman parte del
sistema de control.
Se recomienda incluir en el análisis del sistema controlado todas las partes del sistema de control
que están predeterminados el proceso de producción. Los cálculos y estudios de control se dirigen
entonces a las características del controlador, que son modificables por el usuario (estructura y
parámetros) y que se tienen que determinar en la síntesis del controlador.
Punto de medición Sistema controlado Lugar de control Lugar de perturbación
Comparador Controlador Equipo final de control Equipo de medición r y d x w y z x
Sistema de control
Figura 2: Elementos y términos de control
En el Ejemplo 1.2 el sistema controlado consiste de la calefacción y la habitación que se desea
calentar, la variable controlada es la temperatura interior 𝑇𝑖. La salida del controlador determina
el comportamiento del equipo final de control. Generalmente los equipos finales de control son
amplificadores de potencia, controladores de potencia con tiristores, conmutadores para influir la
potencia eléctrica o válvulas para regular el flujo de calor.
Se mide la variable controlada con el equipo de medición, por ejemplo un puente de medición de
temperatura y se lleva al comparador. La variable de referencia (temperatura prescrita) se puede
Ejemplos de aplicaciones de sistemas de control
1.3
Sistema de control de velocidad: El principio básico del regulador de velocidad de Watt para una
máquina se ilustra en el diagrama esquemático de la Figura 3. La cantidad de combustible que se
admite para la máquina se ajusta de acuerdo con la diferencia entre la velocidad de la máquina
que se pretende y la velocidad real.
Figura 3: Regulador de velocidad de Watt
La secuencia de acciones puede describirse del modo siguiente: el regulador de velocidad se ajusta
de modo que, a la velocidad deseada, no fluya aceite a presión en ningún lado del cilindro de
potencia. Si la velocidad real cae abajo del valor deseado debido a una perturbación, la
disminución de la fuerza centrífuga del regulador de velocidad provoca que la válvula de control se
mueva hacia abajo, aportando más combustible y la velocidad del motor aumenta hasta alcanzar
el valor deseado. En cambio, si la velocidad del motor aumenta sobre el valor deseado, el
incremento en la fuerza centrífuga del controlador provoca que la válvula de control se mueva
hacia arriba. Esto disminuye la provisión de combustible y la velocidad del motor se reduce hasta
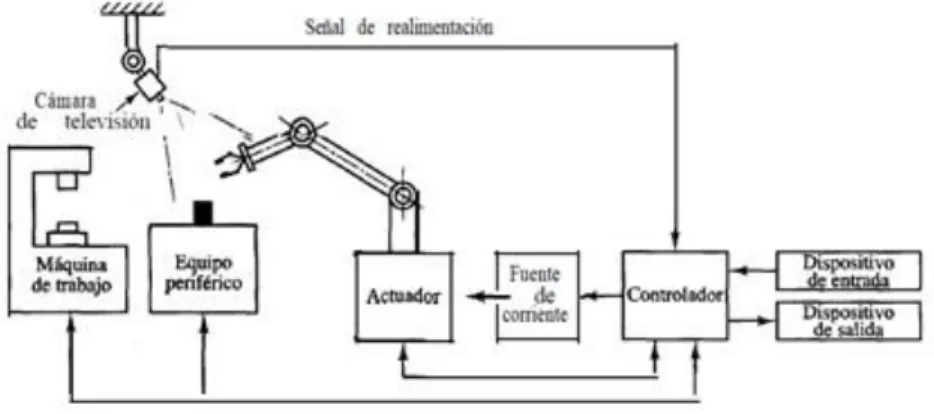
Asimismo, puede trabajar en un ambiente intolerable para operadores humanos. Por ejemplo,
puede funcionar en temperaturas extremas, en un ambiente de presión alta o baja, bajo el agua o
en el espacio. Hay robots especiales para la extinción de incendios, las exploraciones submarinas y
espaciales, por mencionar algunos. El robot industrial debe manejar partes mecánicas que tengan
una forma y un peso determinado.
Figura 4: Control de un robot industrial
Por lo tanto, debe tener al menos un brazo, una muñeca y una mano. Debe tener la fuerza
suficiente para realizar la tarea y la capacidad para al menos una movilidad limitada. De hecho,
algunos robots actuales son capaces de moverse libremente por sí mismos en un espacio limitado
en una fábrica. El robot industrial debe tener algunos sensores. A los robots de nivel bajo, se les
instalan microinterruptores en los brazos como un tipo de sensor. El robot toca primero un objeto
y después, mediante los microinterruptores, confirma la existencia del objeto en el espacio y
avanza al paso siguiente programado. En un robot de nivel alto se usa un medio óptico para
rastrear el fondo del objeto. El robot reconoce el patrón y determina la presencia y orientación del
objeto. Se requiere de una computadora para procesar las señales del proceso de reconocimiento
de patrones (véase Figura 4). En algunas aplicaciones, el robot computarizado reconoce la
presencia y orientación de cada parte mecánica mediante un proceso de reconocimiento de
patrones que consiste en la lectura de los números de código que se fijan a cada parte. A
continuación el robot levanta la parte. La mueve a un lugar conveniente para su ensamble, y
después ensambla varias partes para formar un componente. Una computadora digital bien
2
Medios para Representación
Elementos del diagrama funcional o diagrama de flujo
2.1
de señales
2.1.1
Bloque de transferencia y línea de acción
( )
d
X s
( )
W s X s( )
( )
Z s
( )
Y s
( )
S
G s
( )
C
G s
_
Ilustración 5: Bucle de control cerrado estándar
El diagrama funcional Ilustración 5 muestra un bucle de control cerrado en su forma estándar. La
función de transferencia del controlador 𝐺𝐶(𝑠) y del sistema controlado 𝐺𝑆(𝑠) se expresa con
bloques de transferencia. Cada bloque contiene mínimo una entrada, mínimo una salida y un
comportamiento de transferencia:
Comportamiento de Transferencia
Entrada Salida
II. Respuesta al escalón, que es la reacción del sistema a un escalón en la entrada
III. Respuesta en frecuencia, que es la reacción del sistema a un señal armónica en la entrada
IV. Función de transferencia para señales de entrada transformadas en Laplace
La ecuación diferencial, la respuesta al escalón, la respuesta en frecuencia y la función de
transferencia (I-IV) representan el mismo comportamiento y por lo tanto tienen la misma
estructura:
Ecuación diferencial
( )
x t y t( )
1 dy
T y x
dt
Respuesta al escalón
( )
x t y t( )
1 T1
𝑜𝑟𝑑𝑒𝑛𝑎𝑑𝑎 𝑦(𝑡) 𝑎𝑏𝑠𝑐𝑖𝑠𝑎 𝑡
Respuesta en
frecuencia
( )
X j
Y j(
)1 1 1 j
TFunción de
transferencia
( )
X s Y s( )
Ejemplo 2.1: Elemento de retardo eléctrico y mecánico (Elemento 𝑷𝑻𝟏)
R
C
( ) e( )
x t u t y t( ) u ts( )
( )
i t
Ilustración 7: Circuito RC
k
r
f
c
( ) e( )
x t s t
( ) s( )
y t s t
Ilustración 8: Sistema resorte amortiguación
Se cambia la voltaje de 𝑢𝑒= 0 a
𝑢𝑒0 = 𝑥0.
Se cambia la posición de 𝑠𝑒= 0 a
𝑠𝑒0 = 𝑥0.
𝑖 = 𝐶 ∙𝑑𝑢𝑑𝑡 = 𝐶 ∙ 𝑢𝑠 𝑠̇
𝑢𝑒= 𝑖 ∙ 𝑅 + 𝑢𝑠
𝑢𝑒= 𝑅𝐶 ∙ 𝑢̇𝑠+ 𝑢𝑠
𝑥 = 𝑇1𝑦̇ + 𝑦
𝑟𝑘∙𝑑𝑠𝑑𝑡 = 𝑐𝑠 𝑓(𝑠𝑒− 𝑠𝑠)
𝑟𝑘∙ 𝑠̇𝑠+ 𝑐𝑓∙ 𝑠𝑠= 𝑐𝑓∙ 𝑠𝑒
𝑠𝑒=𝑟𝑐𝑘
𝑓∙ 𝑠̇𝑠+ 𝑠𝑠
𝑥 = 𝑇1𝑦̇ + 𝑦
con 𝑇1= 𝑅𝐶 con 𝑇1=𝑟𝑐𝑘𝑓
La ecuación diferencial de las dos sistemas es idéntica y resulta tienen la misma solución en el
tiempo. La ecuación diferencial se convierte a la función de transferencia mediante
Sistemas no-lineales también se pueden representar con bloques de transferencia:
Ecuación de control
( )
u t
i t
( )
2
I
k
U
Curva característica
estacionaria
( )
x t
y t
( )
x
y
La curva característica describe el comportamiento estacionario de un amplificador con limitación.
2.1.2
Elementos de interconexión
Con elementos de interconexión se conectan los bloques de transferencia. Los siguientes
elementos son usuales:
Ramificación Adición, Inversión Multiplicación, División
Elemento de ramificación: El señal se ramifica. Cada magnitud de salida es igual la magnitud de
entrada 𝑦(𝑡) = 𝑥(𝑡).
( )
x t
( )
y t
( )
y t
Elemento de adición: Los magnitudes que entran se suman según su signo a una magnitud que
sale. Los signos positivos se pueden omitir, los signos negativos se tienen que indicar.
1
( )
x t
1 2 3
( )
( )
( )
( )
y t
x t
x t
x t
2
( )
x t
3
( )
x t
_
Elemento de inversión:
( )
( )
y t
x t
( )
x t
_Elemento de multiplicación:
1
( )
x t
2
( )
x t
1 2
( )
( )
( )
y t
x t
x t
Elemento de división:
1
( )
x t
2
( )
x t
1 2
( )
( ) /
( )
y t
x t
x t
Las líneas de acción siempre son unidireccionales. No hay retroacciones sobre las líneas de acción
y también se asume sin retroacción los bloques de transferencia. Si hay retroacciones, se tienen
que describir con líneas de acción.
Ejemplo 2.2: Diagramas funcionales
a) Ecuación de un bucle de control con dos perturbaciones 𝑧1 y 𝑧2:
b) Elementos diferenciales e integrales:
𝑦(𝑡) =𝑇1
𝐼∙ ∫ 𝑥(𝑡) 𝑑𝑡
1 I T
( )
y t
( )
x t
𝑦(𝑡) = 𝑇𝐷∙𝑑𝑥(𝑡)𝑑𝑡
D
T
d
dt
( )
y t
( )
x t
c) Ecuación de la potencia eléctrica 𝑃:
𝑃 = 𝑈 ∙ 𝐼
U
I
P
d) Relación entre fuerza 𝐹, aceleración 𝑎, y distancia 𝑠 de una masa 𝑚:
𝑎(𝑡) =𝐹(𝑡)𝑚 𝑣(𝑡) = ∫ 𝑎(𝑡) 𝑑𝑡 𝑠(𝑡) = ∫ 𝑣(𝑡) 𝑑𝑡
1
m
( )
v t
( )
F t
s t
( )
( )
a t
e) Ecuación de un bucle cerrado con elementos proporcionales:
𝑥𝑑 = 𝑤 − 𝑥 𝑦 = 𝐾𝑅∙ 𝑥𝑑 𝑥 = 𝐾𝑠∙ 𝑦
d
x
w y x
S
K
R
K
Estructuras del diagrama funcional y simplificaciones
2.2
Las siguientes reglas de simplificación y transformación para estructuras del flujo de señales son
válidas para bucles de control que se describen mediante:
Elementos proporcionales
Funciones de respuesta en frecuencia Funciones de transferencia en Laplace Funciones de transferencia en z
Con esto la ventaja más importante es que las magnitudes de salida resultan por multiplicación
con la entrada. En los siguientes ejemplos se aplican las reglas de simplificación a elementos
proporcionales sin retardo.
2.2.1
Estructura en serie
La conexión en serie de varios bloques de transferencia se puede juntar a un bloque de
transferencia.
e
x
1
K K2 K3
a
x
1 e
K x K K1 2xe K K1 2K3xe
El factor de transferencia de una estructura en serie resulta por la multiplicación de los factores
de transferencias individuales:
1 K 2 K 3 K 1 e
K x
-+
+ 2 e
K x
3 e
K x
e x e x e x e
x xa
El factor de transferencia de una estructura en paralela resulta de la adición de los factores de
transferencia individuales, teniendo en cuenta los signos de cada factor.
𝑥𝑎= (𝐾1− 𝐾2+ 𝐾3) ∙ 𝑥𝑒= 𝐾 ∙ 𝑥𝑒
Ejemplo 2.3: Un ejemplo de electrotécnica
Se calcula la respuesta en frecuencia de una conexión en serie de dos elementos de retardo sin
efecto retroactivo, que están desacoplados. Sin efecto retroactivo aquí significa, que si se cambia
la carga en la salida de un elemento de transferencia, que no hay un efecto hacia su elemento
anterior. En el siguiente ejemplo no se cambiaría el voltaje 𝑢𝑠1(𝑡) , cuando haya un cortocircuito
en la salida 𝑢𝑠2(𝑡). Este comportamiento solo existe en teoría, la tercera ley de Newton enseña
que siempre hay efectos retroactivos.
1
( )
e
u
t
u
s1( )
t
( ) 0
i t
1
R
1C
1
2R
2C
2
( )
e
u
t
u
s2( )
t
Ilustración 9: Filtro de paso-bajo de segundo orden desacoplado
El amplificador debe ser ideal: Resistencia de entrada 𝑅𝑖 → ∞ , Resistencia de salida 𝑅𝑠→ 0 ,
Amplificación 𝐾 = 1. Para cada voltaje existe una función de transferencia hacia el próximo
1
(
)
F j
u
s1(
j
)
1(
)
e
u
j
u
e2(
j
)
u
s2(
j
)
(
)
K
F
j
F j
2(
)
Ilustración 10: Diagrama de flujo de señales del filtro de paso-bajo desacoplado
La respuesta en frecuencia es el cociente entre la salida y la entrada con una señal armónica en la
entrada. Con la ley del divisor de tensión resulta:
𝐹1(𝑗𝜔) =𝑢𝑢𝑠1(𝑗𝜔)
𝑒1(𝑗𝜔) =
1 𝑗𝜔𝐶⁄ 1
𝑅1+ 1 𝑗𝜔𝐶⁄ 1=
1
1 + 𝑗𝜔𝑅1𝐶1=
1
1 + 𝑗𝜔𝑇1
𝐹2(𝑗𝜔) =𝑢𝑢𝑠2(𝑗𝜔)
𝑒2(𝑗𝜔) =
1 𝑗𝜔𝐶⁄ 2
𝑅2+ 1 𝑗𝜔𝐶⁄ 2=
1
1 + 𝑗𝜔𝑅2𝐶2=
1
1 + 𝑗𝜔𝑇2
, con las constantes de tiempo 𝑇1 = 𝑅1𝐶1 y 𝑇2= 𝑅2𝐶2. Para el amplificador vale:
𝐹𝐾=𝑢𝑢𝑒2(𝑗𝜔)
𝑠1(𝑗𝜔) = 1
La conexión en serie de varios bloques de transferencia se puede representar mediante un solo
bloque:
𝐹(𝑗𝜔) =𝑢𝑢𝑠2(𝑗𝜔)
𝑒1(𝑗𝜔) = 𝐹1(𝑗𝜔) ∙ 𝐹𝐾(𝑗𝜔) ∙ 𝐹2(𝑗𝜔)
=1 + 𝑗𝜔𝑇1
1∙
1
1 + 𝑗𝜔𝑇2 =
1
1 + 𝑗𝜔 ∙ (𝑇1+ 𝑇2) + (𝑗𝜔)2∙ 𝑇1∙ 𝑇2 ( 2 )
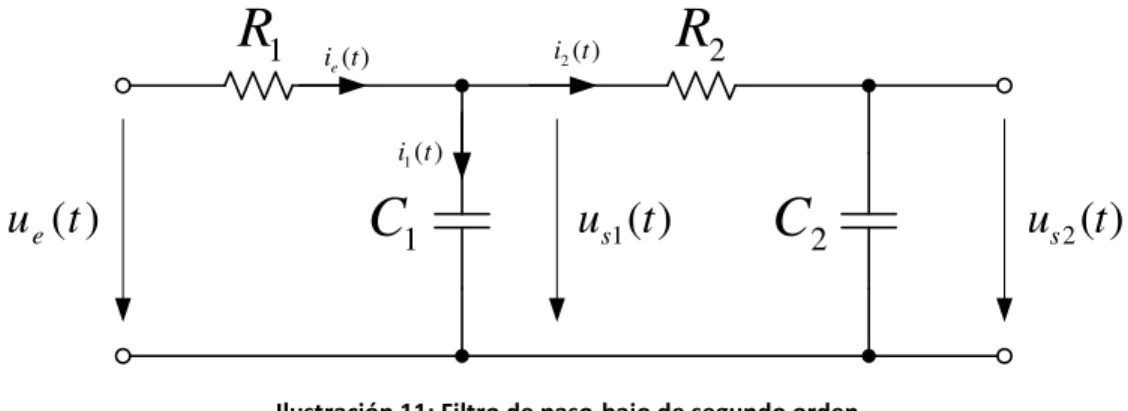
En lo siguiente se elimina el amplificador del filtro de paso-bajo (Ilustración 9) y así la corriente
( )
eu t
u
s1( )
t
( ) e i t 1
R
1C
2R
2C
u
s2( )
t
2( ) i t
1( ) i t
Ilustración 11: Filtro de paso-bajo de segundo orden
El nuevo diagrama de flujo de señales que contiene el efecto retroactivo por la corriente
𝑖2(𝑡) ≠ 0 se puede determinar aplicando las leyes de Kirchhoff:
e
u
_ _ _ ei
i
1u
s1i
2u
s21
1
R
1
C
11
R
21
C
2Ilustración 12: Bloques de transferencia del filtro de paso-bajo
Con un análisis de red y usando la ley del divisor de tensión resulta en:
𝐹(𝑗𝜔) =𝑢𝑢𝑠2(𝑗𝜔)
𝑒(𝑗𝜔) =
𝑢𝑠2
𝑢𝑠1∙
𝑢𝑠1
𝑢𝑒
=1 + 𝑗𝜔𝑅1
2𝐶2∙
1
𝑗𝜔𝐶1‖ (𝑅2+ 1𝑗𝜔𝐶2)
𝑅1+ 1𝑗𝜔𝐶1‖ (𝑅2+ 1𝑗𝜔𝐶2)
=1 + 𝑗𝜔𝑅1
2𝐶2∙
1 + 𝑗𝜔𝑅2𝐶2
1 + 𝑗𝜔(𝑅1𝐶2+ 𝑅2𝐶2+ 𝑅1𝐶2) + (𝑗𝜔)2𝑅1𝐶1𝑅2𝐶2
=1 + 𝑗𝜔 ∙ (𝑇 1
1+ 𝑇2+ 𝑇12) + (𝑗𝜔)2∙ 𝑇1∙ 𝑇2 ( 3 )
2.2.3
Estructura en bucle
2.2.3.1
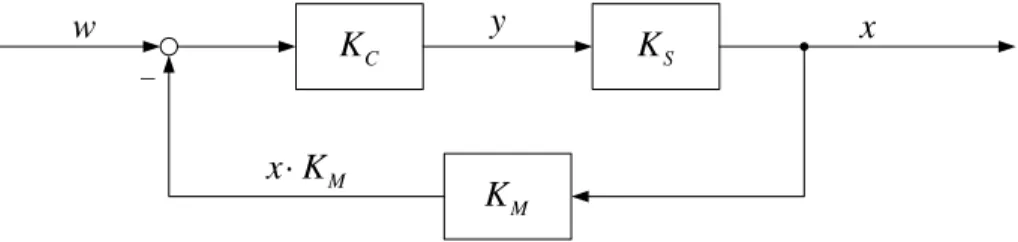
Estructura con realimentación negativa indirecta
En la rama de realimentación del diagrama de flujo de señales hay un bloque de transferencia con
el factor 𝐾𝑀, se compara la variable de referencia 𝑤 con la señal 𝑥 ∙ 𝐾𝑀. Los registradores de
voltaje por ejemplo tienen una estructura así. La variable de referencia 𝑤 (tensión eléctrica) y la
variable controlada 𝑥 (posición del lápiz) no tienen la misma dimensión.
S
K
M
K
C
K
M
x K
_
w
y
x
Ilustración 13: Estructura de bucle de control con realimentación negativa indirecta
Los factores de transferencia 𝐾𝐶, 𝐾𝑆, 𝐾𝑀 son del controlador, del sistema controlado y del equipo
de medición. La ecuación del bucle de control se crea, tomando una vuelta en el bucle y después
separando los variables. Con la ecuación de bucle de control se puede determinar la función de
transferencia y de respuesta en frecuencia.
𝑥 = 𝐾𝐶∙ 𝐾𝑆∙ (𝑤 − 𝑥 ∙ 𝐾𝑀)
𝑥 ∙ (1 + 𝐾𝑀∙ 𝐾𝐶∙ 𝐾𝑆) = 𝑤 ∙ 𝐾𝐶∙ 𝐾𝑆
𝑥 =1 + 𝐾𝐾𝐶∙ 𝐾𝑆
𝑀∙ 𝐾𝐶∙ 𝐾𝑆∙ 𝑤 = 𝐾 ∙ 𝑤
( 4 )
𝐾=𝑤𝑥 =1 +𝐾𝐾𝐶∙𝐾𝑆
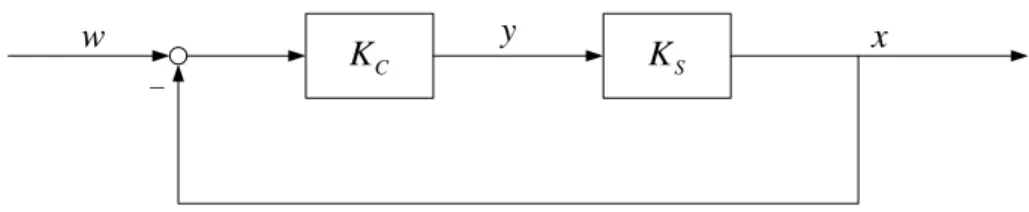
2.2.3.2
Estructura con realimentación negativa directa
La mayoría de los bucles de control con sola una realimentación se pueden expresar con
realimentación negativa directa. Los factores de transferencia 𝐾𝐶, 𝐾𝑆 son del controlador y del
sistema controlado. S K C K _
w y x
Ilustración 14: Estructura de bucle de control con realimentación negativa directa
La ecuación del bucle de control se determina tomando la formula ( 4 ) y sustituyendo 𝐾𝑀= 1:
( 5 )
1 C S C S K K K K x w
Se plantea el siguiente bucle de control con las funciones de transferencia:
2( )
G s
1( )
G s
_ ( )
W s Y s( ) X s( )
, con:
𝐺1(𝑠) =𝑁𝐷1(𝑠)
1(𝑠) 𝐺2(𝑠) =
𝑁2(𝑠)
𝐷2(𝑠)
Aplicando formula ( 5 ) se recibe la función de transferencia del bucle de control:
𝐾=𝑤𝑥 =1 +𝐾𝐶𝐾∙𝐾𝑆
En general se define la siguiente formula:
( 6 )
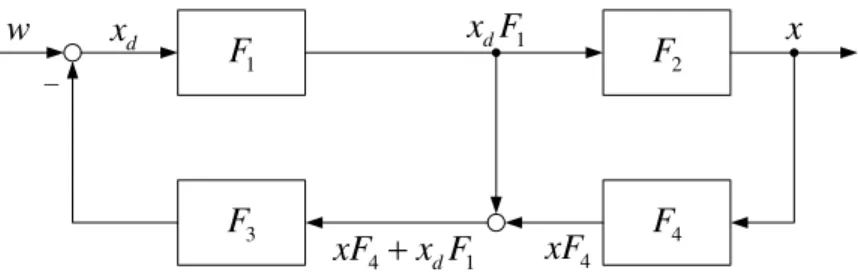
Ejemplo 2.4: Comportamiento de transferencia
de un bucle de control con realimentación de una variable intermedia. Las funciones 𝐹1… 𝐹4
representan aquí cualquier comportamiento de transferencia.
2
F
1
F
_
w x
4
F
3
F
d
x x Fd 1
4
xF
4 d 1
xF x F
Ilustración 15: Bucle de control con variable intermedia
La salida 𝑥 es una función de la variable de error, pues 𝑥 = 𝑥𝑑𝐹1𝐹2. En seguida se calcula la
variable de error 𝑥𝑑 en función de la salida sobre las realimentaciones:
𝑥𝑑= 𝑤 − 𝐹3(𝑥𝐹4+ 𝑥𝑑𝐹1)
= 𝑤 − 𝑥𝑑𝐹1𝐹2𝐹3𝐹4− 𝑥𝑑𝐹1𝐹3
𝑤 =𝐹𝑥
1𝐹2[1 + 𝐹1𝐹2𝐹3𝐹4+ 𝐹1𝐹3]
Resulta la función de transferencia completa:
𝐹 = 𝑥
𝑤 =
𝐹1𝐹2
1 + 𝐹1𝐹3+ 𝐹1𝐹2𝐹3𝐹4
𝐺(𝑠) =1 +𝐺1𝐺𝐺2
1𝐺2=
𝑃𝑟𝑜𝑑𝑢𝑐𝑡𝑜𝑓𝑢𝑛𝑐𝑖𝑜𝑛𝑒𝑠𝑟𝑎𝑚𝑎𝑑𝑒𝑖𝑑𝑎
Tomando en cuenta el resulta del Ejemplo 2.4 se define la siguiente fórmula para varios bucles en
cascada:
( 7 )
Ejemplo 2.5: Bucle cerrado en cascada I
3( )
G s
1( )
G s
_ ( )
W s X s( )
2( )
G s
_
Se calcula la función de transferencia con formula ( 7 ):
𝐺(𝑠) =𝑊(𝑠)𝑋(𝑠) =1 + 𝐺𝐺1𝐺2𝐺3
2𝐺3+ 𝐺1𝐺2𝐺3
Ejemplo 2.6: Bucle cerrado en cascada II
3( )
G s
1( )
G s
_ ( )
W s X s( )
2( )
G s G s4( )
_
5( )
G s
Se calcula la función de transferencia con formula ( 7 ):
𝐺(𝑠) =𝑊(𝑠) =𝑋(𝑠) 1 + 𝐺 𝐺1𝐺2𝐺3𝐺4
4− 𝐺2𝐺3𝐺4𝐺5+ 𝐺1𝐺2𝐺3𝐺4
2.2.4
Ecuación diferencial con bloques de transferencia
Para representar una ED de orden 𝑛 con bloques de transferencia se tienen que introducir
variables de estado e integradores. Se requieren 𝑛 + 1 variables de estados e 𝑛 integradores.
Las 𝑛 condiciones iniciales de la ED se definen en los parámetros de los integradores, puesto que
cada integrador necesita un valor donde empieza a integrar.
a) Ecuación diferencial de primer orden
𝑥(𝑡) = 𝑦̇(𝑡) + 𝑦(𝑡)
Se definen variables de estado
𝑦1 = 𝑦
𝑦2 = 𝑦̇1= 𝑦̇
, que se sustituyen en la ED y se despeja la mayor variable de estado:
𝑥 = 𝑦2+ 𝑦1
𝑦2= 𝑥 − 𝑦1
Esta ecuación se modela con bloques de transferencia como un bucle de control, cuando existen
dos representaciones del integrador:
_
2
y
y
1x
_
2
y
1
s
1
y
x
b) Sistema de segundo orden
𝑦̈(𝑡) + 16𝑦(𝑡) = 𝑥(𝑡)
𝑦1 = 𝑦
𝑦2 = 𝑦̇1
𝑦3 = 𝑦̇2 = 𝑥 − 16𝑦1
_ 3
y
1 s 2y
x
1 s 1y
16
21
16
s
1y
x
Las condiciones iniciales se definen en los parámetros de los integradores.
c) Sistema de segundo orden
𝑦̈(𝑡) + 6𝑦̇(𝑡) + 5𝑦(𝑡) = 𝑥(𝑡) = 0
𝑦1= 𝑦
𝑦2= 𝑦̇1
𝑦3= 𝑦̇2= −6𝑦2− 5𝑦1
_ 3
y
1 s 2y
1 s 1y
6
5
_ 21
6
5
s
s
y
x
Como la ED es homogénea (entrada 𝑥(𝑡) = 0), el sistema es libre y su movimiento solo depende
Cálculo de bucles de control con elementos
2.3
proporcional
Se estudia un bucle de control sin retardos. Controlador y sistema controlado son elementos
proporcionales. Con el comportamiento de transferencia se quiere determinar el factor de
control. El comportamiento de transferencia para un bucle de control sin retardos es la relación
entre la variable de entrada con la variable de salida en el dominio de tiempo.
d
x
1
z
z
2S
K
C
K
_w
y
x
Ilustración 16: Bucle de control con elementos ideales
𝐾𝐶 y 𝐾𝑆 son factores de transferencia del controlador (ganancia del controlador) y del sistema controlado (ganancia del sistema). Hay que distinguir entre dos variables de perturbación: 𝑧1 en
la entrada (suministro) y 𝑧2 en la salida (carga) del sistema controlado. En sistemas técnicos la
variable de control 𝑦 equivale a la potencia suministrada al sistema. La variable de perturbación
de suministro disminuye esta potencia, si actúa negativa. La variable de perturbación de carga
influye la variable controlada directa. Si una perturbación actúa dentro del sistema controlado, se
transforma a la entrada o salida del sistema usando las reglas del párrafo 2.4. Usualmente se
estudian separados los efectos de la variable de referencia y las perturbaciones a la variable
controlada.
Función de transferencia de la perturbación de suministro: 𝑤 = 0, 𝑧1≠ 0, 𝑧2= 0
(−𝑥 ∙ 𝐾𝐶 + 𝑧1) ∙ 𝐾𝑆 = 𝑥 𝑥 ∙ (1 + 𝐾𝐶 ∙ 𝐾𝑆) = 𝐾𝑆∙ 𝑧1
Sin control, cuando 𝐾𝐶 = 0, resulta 𝐾𝑧1 = 𝐾𝑆.
Función de transferencia de la perturbación de carga: 𝑤 = 0, 𝑧1= 0, 𝑧2≠ 0
−𝑥 ∙ 𝐾𝐶∙ 𝐾𝑆+ 𝑧2= 𝑥 𝑥 ∙ (1 + 𝐾𝐶∙ 𝐾𝑆) = 𝑧2
Sin control, cuando 𝐾𝐶 = 0, resulta 𝐾𝑧2 = 1.
Por el controlador se disminuye el efecto de las perturbaciones a la variable controlada. El factor
de control 𝑟 es una medida de la supresión de perturbaciones. La relación entre la función de
transferencia de perturbación con control y sin control resulta el factor de control:
Con el factor de control se puede calcular el comportamiento de bucles de control sin retardos. Si
los bucles tienen retardos, el factor de control solo es válido para el comportamiento estacionario.
Un control en bucle cerrado es mejor, cuando menor es el factor de control.
𝐾𝑧1 =
𝑥 𝑧1=
𝐾𝑆
1 +𝐾𝐶∙𝐾𝑆
𝐾𝑧2 =
𝑥 𝑧2 =
1
1 +𝐾𝐶∙𝐾𝑆
𝑟=1 +𝐾1
𝐶∙𝐾𝑆 =
𝐾𝑧 (𝑐𝑜𝑛𝑐𝑜𝑛𝑡𝑟𝑜𝑙)
Ejemplo 2.7: Factor de control con elementos proporcionales
Controlador y sistema controlado son elementos proporcionales con 𝐾𝐶 = 12 y 𝐾𝑆= 2. Variable
de referencia 𝑤 y variable de perturbación de suministro se cambian de cero a uno. Se calculan
los resultados de la variable controlada 𝑥.
d
x
z
S
K
CK
_w
y
x
Respuesta a la variable de referencia:
𝑤(𝑡) = {0 para 𝑡 ≤ 01 para 𝑡 > 0 𝑧(𝑡) = 0
𝑥 = 𝐾𝐶∙ 𝐾𝑆
1 + 𝐾𝐶∙ 𝐾𝑆∙ 𝑤 = 0.96 < 𝑤
Respuesta a la perturbación:
𝑧(𝑡) = {0 para 𝑡 ≤ 01 para 𝑡 > 0 𝑤(𝑡) = 0
𝑥𝑧 =1 + 𝐾𝐾𝑆
𝐶∙ 𝐾𝑆∙ 𝑧 = 0.08 > 0
𝑟 =1 + 𝐾1
Conversión de diagramas funcionales
2.4
2.4.1
Reglas para la conversión
En diagramas funcionales más complejos, las reglas de conversión simples ya no son suficientes,
para llevar a cabo más estudios sobre sistemas de control. Eso también es el caso, cuando se
intersectan lazos separados entre ellos. Esto se llama enlazamiento.
Para transformar estructuras de control se necesitan las siguientes operaciones:
Juntar bloques de transferencia en seria o en paralela Simplificar estructuras realimentadas
Trasladar bloques de transferencia y lugares de adición o elementos de ramificación Trasladar y juntar lugares de adición
Trasladar lugares de adición y de ramificación
A continuación se presentan reglas, con las que se puede convertir un diagrama funcional mallado
así, que en consecuencia se puede determinar la respuesta en frecuencia o la función de
transferencia. El comportamiento de transferencia de las estructuras en una regla es equivalente.
Las reglas de conversión están especificadas para la respuesta en frecuencia 𝐹(𝑗𝜔) y funciones
armónicas 𝑥𝑒(𝑗𝜔) y 𝑥𝑎(𝑗𝜔). Las reglas también valen para funciones de transferencia 𝐺(𝑠) o si
2.4.2
Tabla de las reglas de conversión
1. Unión de bloques de transferencia paralelas
𝑥𝑎 = (𝐹1± 𝐹2) ∙ 𝑥𝑒
1
F
2
F
e
x xa
1 2
F
F
e
x
x
a2. Unión de bloques de transferencia en serie
𝑥𝑎 = 𝐹1∙ 𝐹2∙ 𝑥𝑒
1
F F2
e
x xa
1 2
F F
e
x
x
a3. Estructura en bucle con realimentación negativa indirecta
𝑥𝑎= 𝐹1∙ (𝑥𝑒∓ 𝐹2∙ 𝑥𝑎)
1
F
2
F
e
x xa
1 1 2 1 F F F e
x xa
4. Estructura en bucle con realimentación negativa directa
𝑥𝑎= 𝐹1∙ (𝑥𝑒∓ 𝑥𝑎)
1
F
e
x xa
1 1 1 F F e
5. Traslado del lugar de adición y bloque de transferencia
𝑥𝑎= 𝐹 ∙ (𝑥𝑒1± 𝑥𝑒2)
F
1
e
x xa
2 e x F 1 e x
2 e x a x F6. Traslado del lugar de adición y bloque de transferencia
𝑥𝑎= 𝐹 ∙ 𝑥𝑒1± 𝑥𝑒2
F 1 e x
2 e x a x F 1 ex xa
2
e
x
1 F
7. Traslado del elemento de ramificación y bloque de transferencia
𝑥𝑎 = 𝐹 ∙ 𝑥𝑒
F e x a x a
x xe
a x a x F F
8. Traslado del elemento de ramificación y bloque de transferencia
𝑥𝑎1= 𝐹 ∙ 𝑥𝑒, 𝑥𝑎2= 𝑥𝑒
e x 1 a x 2 a x F F e x
1 /F
9. Traslado del lugar de adición
𝑥𝑎= 𝑥𝑒1± 𝑥𝑒2± 𝑥𝑒3
1 e x
2 e x
3 e x ax xe1
3 e x
2 e x a x10. Unión de lugares de adición
𝑥𝑎= 𝑥𝑒1± 𝑥𝑒2± 𝑥𝑒3
1 e x
2 e x
3 e x a x 1 e x
3 e x
2 e x a x11. Traslado del lugar de adición y elemento de ramificación
𝑥𝑎= 𝑥𝑒1± 𝑥𝑒2
2.4.3
Ejemplos de aplicación
Ejemplo 2.8: Control de velocidad de giro:
En control se necesita mucho la regla no. 5. Se presenta el control de velocidad de giro con la
suposición que el sistema controlado, el controlador y el equipo de medición no contienen
retardos o elementos no linéales.
S
K
T
K
C
K
x
U
_
w
n
U
yn
xT
K
U
wU
xd𝑛𝑤= 2000 𝑚𝑖𝑛−1 Variable de referencia (velocidad de giro)
𝑛𝑥 Variable controlada (velocidad de giro)
𝑈𝑦 Variable de control (Tensión eléctrica de inducido)
𝐾𝐶 = 20 Factor de ganancia del controlador
𝐾𝑆= 500 𝑚𝑖𝑛−1/𝑉 Factor de ganancia del sistema controlada
𝐾𝑇 = 1 𝑚𝑉/𝑚𝑖𝑛−1 Constante tacométrica
La variable de referencia 𝑛𝑤 se tiene que convertir a una voltaje 𝑈𝑤 mediante el elemento de
transferencia 𝐾𝑇. Se quiere calcular la variable controlada 𝑛𝑥 para un valor de referencia de
𝑛𝑤 = 2000 𝑚𝑖𝑛−1. Con regla no. 5 se puede trasladar el bloque de transferencia 𝐾𝑇:
S
K
C
K
_
w
n
U
xdU
yn
xT
K
Los bloques 𝐾𝑇 y 𝐾𝐶 se unen a un solo bloque:
S
K
C T
K
K
_
w
n
U
yn
xDe la formula ( 8 ) se determina el valor estacionario de la variable controlada 𝑛𝑥:
𝑛𝑥∙ (1 + 𝐾𝑇 ∙ 𝐾𝐶∙ 𝐾𝑆) = 𝐾𝑇∙ 𝐾𝐶∙ 𝐾𝑆∙ 𝑛𝑤
𝑛𝑥 =1 + 𝐾𝐾𝑇∙ 𝐾𝐶∙ 𝐾𝑆
𝑇∙ 𝐾𝐶∙ 𝐾𝑆∙ 𝑛𝑤= 1818.2 𝑚𝑖𝑛
−1
El bucle de control tiene un valor de error estacionario de:
𝑛𝑥𝑑 = 𝑛𝑤− 𝑛𝑥 = 181.8 𝑚𝑖𝑛−1
y alcanza solo cerca 91% del valor de referencia. Este error se puede disminuir a través del
aumento del factor de ganancia del controlador. Sin embargo eso puede hacer inestable el bucle
de control, si existen elementos de retardo en el mismo.
Ejemplo 2.9 Diagrama funcional:
El siguiente diagrama funcional queda para estudios en la casa:
22
F
21
F
_
e
x xa
1
F
_
31
F
32
3
Métodos Matemáticos
Normalización de ecuaciones (estandarización)
3.1
Con valores sin dimensiones se simplifican la aplicación de métodos de control. Las magnitudes del
sistema de control se relacionan a valores característicos con la estandarización. Estas magnitudes
se dividen con los valores característicos y resultan adimensional. Valores característicos en
general son valores operativos (valores nominales) o valores del punto de operación 𝑂. Se
considera la siguiente ecuación lineal de un sistema controlado:
𝑥 = 𝐾𝑆∙ 𝑓(𝑦)
Si la variable controlada 𝑥 tiene otra dimensión que la variable de control 𝑦, entonces la
dimensión del factor 𝐾𝑆 no es [1]. Se relacionan las variables 𝑥 y 𝑦 a sus valores nominales 𝑥𝑁
y 𝑦𝑁, resulta en:
𝑥
𝑥𝑁= 𝐾𝑆∙
1
𝑥𝑁∙ 𝑓 (𝑦𝑁∙
𝑦
𝑦𝑁)
𝑥′= 𝐾
𝑆∙𝑦𝑥𝑁
𝑁∙ 𝑓(𝑦
′)
𝑥′= 𝐾
𝑆′∙ 𝑓(𝑦′)
Las magnitudes normalizadas 𝑥′, 𝑦′ y 𝐾𝑆′ son adimensional. Las ventajas son:
Resultan ecuaciones adimensionales más simples Diagramas funcionales serán más simples
Sistemas normalizadas se pueden comparar (mejor)
El voltaje 𝑈𝑥 del alternador de un vehículo depende de la velocidad de giro 𝑛𝑦. El factor 𝐾𝑆
representa la constante de motor, que depende de la construcción del mismo:
𝑈𝑥 = 𝐾𝑆∙ 𝑛𝑦 [𝑉] = [𝑟𝑝𝑚] ∙𝑉 [𝑟𝑝𝑚]
El voltaje nominal resulta por la velocidad nominal 𝑈𝑥𝑁 = 𝐾𝑆∙ 𝑛𝑦𝑁, entonces:
𝑈𝑥
𝑈𝑥𝑁 =
𝐾𝑆∙ 𝑛𝑦
𝐾𝑆∙ 𝑛𝑦𝑁 [1] = [1]
Entonces el valor nominal del voltaje es igual al valor nominal de la velocidad: 𝑈𝑥′ = 𝑛𝑦′. El voltaje
𝑈𝑥 se convierte a un valor fraccionado adimensional.
Por ejemplo:
𝑈𝑥𝑁 = 24 𝑉𝐷𝐶
𝑛𝑦𝑁= 236 𝑟𝑝𝑚
𝑛𝑦= 59 𝑟𝑝𝑚
Ilustración 17: Pittman GM9236S021
La constante de motor es 𝐾𝑆=𝑈𝑥𝑁 𝑛𝑦𝑁=
24 𝑉
236 𝑟𝑝𝑚≈ 0.102 𝑉
𝑟𝑝𝑚. La velocidad nominal resulta:
Hay que normalizar la ecuación del desplazamiento 𝑥(𝑡) = ∫ 𝑣 𝑑𝑡 con los valores nominales
𝑥𝑁= 1 𝑚 y 𝑣𝑁 = 0.2 𝑚𝑠−1:
𝑥(𝑡)
𝑥𝑁 =
𝑣𝑁
𝑥𝑁∙ ∫
𝑣(𝑡)
𝑣𝑁 𝑑𝑡
𝑥′= 1
𝑇𝐼∙ ∫ 𝑣
′𝑑𝑡
[1] = [1𝑠] ∙[1] ∙ [𝑠]
La constante de tiempo de integración 𝑇𝐼= 5 𝑠 es el tiempo que necesita un objeto para llegar a
𝑥𝑁= 1 𝑚, si se mueve constante con 𝑣𝑁= 0.2 𝑚𝑠−1.
Ejemplo 3.3:
Hay que normalizar la ecuación de velocidad 𝑣(𝑡) =𝑑𝑥
𝑑𝑡 con los valores nominales 𝑣𝑁= 2 𝑚𝑠−1
y 𝑥𝑁 = 0.5 𝑚:
𝑣(𝑡)
𝑣𝑁 =
𝑥𝑁
𝑣𝑁∙
𝑑 (𝑥(𝑡)𝑥
𝑁 )
𝑑𝑡
𝑣′(𝑡) = 𝑇
𝐷∙𝑑𝑥 ′(𝑡)
𝑑𝑡
[1] = [𝑠] ∙ [1𝑠]
La constante de tiempo de diferenciación 𝑇𝐷= 0.25 𝑠 es el tiempo que necesita un objeto para
Linealización de elementos del bucle de control
3.2
3.2.1
Definición de linealidad
Elementos del sistema de control son lineales, si cumplen el principio de amplificación y el
principio de superposición.
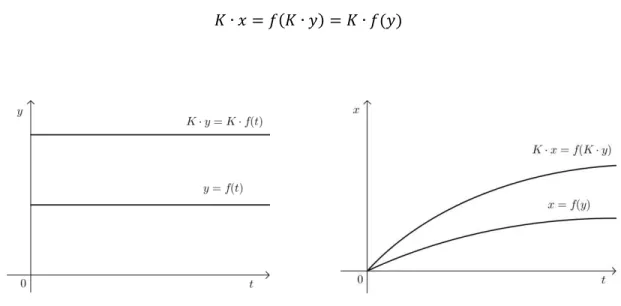
Principio de amplificación:
La amplificación del argumento de una función lineal 𝑥 = 𝑓(𝑦) con un factor 𝐾, amplifica igual el
valor de la función:
𝐾 ∙ 𝑥 = 𝑓(𝐾 ∙ 𝑦) = 𝐾 ∙ 𝑓(𝑦) ( 9 )
Ilustración 18: Principio de amplificación
Principio de superposición:
Ilustración 19: Principio de superposición
Ejemplo 3.4: Elemento proporcional
Hay que investigar, si un elemento proporcional 𝑥 = 𝐾𝑃∙ 𝑦 = 𝑓(𝑦) es lineal. Se le aplica el
principio de amplificación:
𝐾 ∙ 𝑥 = 𝐾 ∙ 𝐾𝑃𝑦 = 𝐾𝑃∙ 𝐾𝑦 = 𝑓(𝐾𝑦)
, y el principio de superposición:
𝑥1= 𝐾𝑃𝑦1
𝑥2= 𝐾𝑃𝑦2
𝑥1± 𝑥2= 𝐾𝑃𝑦1± 𝐾𝑃𝑦2= 𝐾𝑃(𝑦1± 𝑦2)
𝑥1± 𝑥2= 𝑓(𝑦1) ± 𝑓(𝑦2) = 𝑓(𝑦1± 𝑦2)
Como el elemento proporcional cumple con los dos teoremas, es lineal.
Muchos métodos eficientes de teoría de control solamente se pueden aplicar a elementos
lineales. Elementos no-lineales se tienen que linealizar entonces, para que se puedan aplicar esos
métodos. Las perturbaciones en control de referencia fija solo causan desviaciones pequeñas
alrededor del punto de operación. Por lo tanto las curvas características no-lineales se linealizan
con precisión alta en el punto de operación. El arranque del sistema de control no se toma en
3.2.2
Linealización de una entrada
Curvas características, que se determinaron mediante mediciones experimentales, se linealizan en
un punto de operación 𝑂 aplicando la tangente en este punto. Un punto de operación 𝑂 es un
punto (valores constantes) específico del sistema de control, donde se quiere mantener el sistema
estable alrededor de este punto.
Ilustración 20: Linealización de una curva característica experimental
La constante de proporcionalidad 𝐾𝑃 es la ganancia del elemento del bucle de control en el
estado estable para pequeños cambios en la variable de entrada. La dimensión de 𝐾𝑃 se define
con la dimensión de la variable de salida dividida con la dimensión de la variable de entrada:
dim [𝐾𝑃] =dim [𝑥]dim [𝑦] ( 11 )
Si se puede representar la curva característica analítica (con ecuaciones), entonces la constante de
, se consideran las siguientes magnitudes:
𝑦 = 𝑓(𝑡) Variable de entrada 𝑥 = 𝑓(𝑦(𝑡)) Variable de salida
𝑦𝑂 = 𝑐𝑜𝑛𝑠𝑡. Punto de operación 𝑂 𝑥𝑂= 𝑐𝑜𝑛𝑠𝑡. Punto de operación 𝑂
∆𝑦(𝑡) Pequeña desviación de 𝑦𝑂 ∆𝑥(𝑡) Pequeña desviación de 𝑥𝑂
La salida 𝑥(𝑡) es una función de la entrada y por eso también una función del tiempo. El punto de
operación 𝑂 se define por las constantes 𝑦𝑂 y 𝑥𝑂 y será el punto alrededor se linealiza la
función no-lineal 𝑓(𝑦). El valor de esta función en el punto de operación se puede aproximar con:
𝑥 = 𝑓(𝑦) = 𝑓(𝑦𝑂+ ∆𝑦(𝑡)) ≈ 𝑥𝑂+ ∆𝑥(𝑡) ( 12 )
Formula ( 12 ) corresponde al Teorema de Taylor de una función racional que se termina tras del
primer término. La fórmula muestra el cambio que haya en la variable de salida, si hay un cambio
en la variable de entrada. Ilustración 21 muestra la linealización gráficamente. El punto 𝐴 se
aproxima mediante el punto 𝐵:
Ilustración 21: Linealización de una curva característica analítica
La pequeña desviación ∆𝑥(𝑡) se define entonces con la pendiente de la función 𝑓(𝑦) en el
punto de operación:
Restando la parte constante 𝑥𝑂 = 𝑓(𝑦𝑂) resulta en:
∆𝑥(𝑡) =𝑑𝑓(𝑦)
𝑑𝑦 |𝑂∙ ∆𝑦(𝑡) =
!
𝐾𝑃∙ ∆𝑦(𝑡) ( 14 )
La linealización resulta en un elemento proporcional, cuya constante de proporcionalidad 𝐾𝑃
depende del punto de operación seleccionado. Solo es válida para pequeñas desviaciones
alrededor del punto de operación.
( )
y t x t( )
( )
f y
y t( )K
P x t( )El error de la aproximación ( 12 ) se llama error absoluto de linealización y representa la distancia
entre el punto 𝐵 y el punto 𝐴:
𝑒𝑎𝑏𝑠= |𝑓(𝑦𝑂+ ∆𝑦(𝑡)) − (𝑥𝑂+ ∆𝑥(𝑡))|
𝑒𝑎𝑏𝑠= |𝑓(𝑦𝑂+ ∆𝑦(𝑡)) − 𝑓(𝑦𝑂) − 𝐾𝑃∙ ∆𝑦(𝑡)| ( 15 )
Este error es más grande, lo más grande es la curvatura de la función 𝑥 = 𝑓(𝑦), que depende
directo de la segunda derivada 𝑓′′(𝑦). El cociente diferencial de la segunda derivada se define
mediante:
∆2𝑥
∆𝑦2=
𝑓(𝑦 + ∆𝑦) + 𝑓(𝑦 − ∆𝑦) − 2𝑓(𝑦)
∆𝑦2 ( 16 )
Ejemplo 3.5: Linealización de una función con una entrada
Se necesita linealizar un elemento no-lineal 𝑥(𝑡) = 2 ∙ 𝑦2(𝑡) en el punto de operación 𝑦𝑂 = 5.
Primero se calcula la componente faltante del punto de operación 𝑥𝑂 = 𝑓(𝑦𝑂) = 2 ∙ 𝑦𝑂2 = 50 ,
después se aplica el teorema de Taylor y se calcula la constante de proporcionalidad:
𝐾𝑃=𝑑𝑓(𝑦)𝑑𝑦 |
𝑦𝑂=5
= 4 ∙ 𝑦𝑂 = 20
El elemento no-lineal se aproxima entonces con una función lineal en el punto de operación ( 12 )
:
𝑥(𝑡) ≈ 𝑥𝑂+ ∆𝑥(𝑡) = 𝑥𝑂+ 𝐾𝑃∙ ∆𝑦(𝑡) = 50 + 20 ∙ ∆𝑦(𝑡)
Un cambio ∆𝑦(𝑡) de la variable de control en el punto de operación 𝑦𝑂 = 5 se amplifica con
𝐾𝑃= 20. Lo más grande es este cambio, más grande será el error absoluto de linealización 𝑒𝑎𝑏𝑠, porque se aumentará la distancia entre punto 𝐴 y punto 𝐵 en la linealización (Ilustración 21).
Por ejemplo con un cambio de la variable de control ∆𝑦(𝑡) = 0.1 , la variable controlada valdrá
𝑥 = 50 + 20 ∙ 0.1 = 52. Sin linealización la variable controlada será 𝑥 = 𝑓(𝑦𝑂+ ∆𝑦(𝑡)) = 2 ∙
(5 + 0.1)2= 52.02. La diferencia entre los dos valores representa el error absoluto de
linealización:
𝑒𝑎𝑏𝑠= |𝑓(𝑦𝑂+ ∆𝑦(𝑡)) − 𝑓(𝑦𝑂) − 𝐾𝑃∙ ∆𝑦(𝑡)| = |52.02 − 52| = 0.02
Se sustituye entonces el elemento no-lineal con un elemento proporcional, cuya constante de
proporcionalidad 𝐾𝑃 depende del punto de operación alrededor se linealiza el elemento
no-lineal:
( )
3.2.3
Linealización de varias entradas
Elementos no-lineales pueden tener más que una entrada:
1
( )
y t
( )
x t
1 2
( ,
,...,
m)
f y y
y
2
( )
y t
( )
m
y t
...
Ilustración 22: Elemento no-lineal con varias entradas
𝑥(𝑡) = 𝑓(𝑦1, 𝑦2, ⋯ , 𝑦𝑚)
Ahora se tiene que aplicar el teorema de Taylor a cada variable de entrada. Formula ( 12 ) se
convierte a:
𝑥 = 𝑓(𝑦1𝑂+ ∆𝑦1(𝑡), 𝑦2𝑂+ ∆𝑦2(𝑡), ⋯ , 𝑦𝑚𝑂+ ∆𝑦𝑚(𝑡)) ≈ 𝑥𝑂+ ∆𝑥(𝑡) ( 17 )
La pequeña desviación ∆𝑥(𝑡) ahora representa el diferencial total, que contiene las derivadas
parciales con respeto a cada variable de entrada:
𝑥𝑂+ ∆𝑥(𝑡) = 𝑓(𝑦1𝑂, 𝑦2𝑂, ⋯ , 𝑦𝑚𝑂) +𝜕𝑦𝜕𝑓
1|𝑂∙ ∆𝑦1(𝑡) +
𝜕𝑓
𝜕𝑦2|𝑂∙ ∆𝑦2(𝑡) + ⋯ +
𝜕𝑓
𝜕𝑦𝑚|𝑂∙ ∆𝑦𝑚(𝑡) ( 18 )
y que se puede expresar como suma:
∆𝑥(𝑡) = ∑𝜕𝑦𝜕𝑓
𝑖|𝑂∙ ∆𝑦𝑖(𝑡) 𝑚
𝑖=1
( 19 )
Cada derivada parcial representa una constante de proporcionalidad y el elemento no-lineal se
aproxima con una combinación lineal de varios elementos proporcionales:
Todas las entradas ahora influyen separadas a la salida, se dice que las entradas están
desacopladas mutuamente:
1
( )
y t
( )
x t
1 PK
2
( )
y t
2 PK
( )
my t
PmK
... ...Ilustración 23: Varios elementos proporcionales en paralelo
Ejemplo 3.6: Linealización de una función con dos entrada
Se quiere linealizar el elemento no-lineal:
𝑥(𝑡) = 𝑓(𝑦1, 𝑦2) =𝑦1
2(𝑡)
𝑦2(𝑡)
en el punto de operación 𝑦1𝑂 = 1 y 𝑦2𝑂 = 2.
Primero se calcula la componente faltante del punto de operación 𝑥𝑂 = 𝑓(𝑦1𝑂, 𝑦2𝑂) =𝑦1𝑂2
𝑦2𝑂= 0.5
, después se aplica el teorema de Taylor y se calculan las constantes de proporcionalidad:
𝐾𝑃1=𝜕𝑦𝜕𝑓
1|𝑦1𝑂 𝑦2𝑂
=2 ∙ 𝑦𝑦 1𝑂
2𝑂 = 1
𝐾𝑃2=𝜕𝑦𝜕𝑓
2|𝑦1𝑂 𝑦2𝑂
= −𝑦1𝑂2
Calculo de ecuaciones diferenciales para bucles de
3.3
control
Usualmente la relación entre la magnitud de entrada y salida de un sistema de control se describe
con ecuaciones diferenciales no-lineales, cuyas soluciones son laboriosos por lo general. Se limita
el análisis del sistema entonces al punto de operación 𝑂, donde se puede linealizar el sistema. El
resultado es una ecuación diferencial lineal con coeficientes constantes y real:
𝑎𝑛∙𝑑
𝑛𝑦
𝑑𝑡𝑛+ 𝑎𝑛−1∙
𝑑𝑛−1𝑦
𝑑𝑡𝑛−1+ ⋯ + 𝑎1∙
𝑑𝑦
𝑑𝑡 + 𝑎0∙ 𝑦 =
𝑏𝑚∙𝑑
𝑚𝑥
𝑑𝑡𝑚 + 𝑏𝑚−1∙𝑑
𝑚−1𝑥
𝑑𝑡𝑚−1+ ⋯ + 𝑏1∙𝑑𝑥𝑑𝑡 + 𝑏0∙ 𝑥 (𝐧 ≥ 𝐦) ( 21 )
𝑛 representa el orden de la ecuación diferencial (ED) y depende del “la cantidad de los
acumuladores de energía” del sistema.
3.3.1
Solución de ecuaciones diferenciales lineales
Si se conoce la función de entrada 𝑥(𝑡) y los 𝑛 valores iniciales:
𝑦(0), 𝑦̇(0), 𝑦̈(0), …, 𝑦(𝑛−1)(0)
, se puede determinar la solución completa 𝑦(𝑡) de la ecuación diferencial. Puesto que la ED es
lineal, la solución completa resulta por la suma de la solución homogénea y la solución particular
𝑦(𝑡) = 𝑦ℎ(𝑡) + 𝑦𝑝(𝑡). Con los valores iniciales se determinan las constantes de integración de
𝑦ℎ(𝑡). Por el tipo de la función de entrada 𝑥(𝑡) se plantea el tipo de la solución particular 𝑦𝑝(𝑡).
3.3.1.1
Solución homogénea de una ecuación diferencial homogénea
Se resuelve la ED homogénea
planteando la solución homogénea mediante 𝑦ℎ(𝑡) = 𝐶 ∙ 𝑒𝛼𝑡 con 𝐶, 𝛼 ∈ ℝ, puesto que esta es
la solución homogénea de una ED lineal homogénea de primer orden. Sustituyendo 𝑦ℎ(𝑡) y sus
derivadas en la ED ( 22 ):
𝑎𝑛∙ 𝐶 ∙ 𝛼𝑛𝑒𝛼𝑡+ 𝑎𝑛−1∙ 𝐶 ∙ 𝛼𝑛−1𝑒𝛼𝑡+ ⋯ + 𝑎1∙ 𝐶 ∙ 𝛼𝑒𝛼𝑡+ 𝑎0∙ 𝐶 ∙ 𝑒𝛼𝑡 = 0 ( 23 )
Factorizando 𝐶 ∙ 𝑒𝛼𝑡 lleva a la ecuación característica:
𝑎𝑛∙ 𝛼𝑛+ 𝑎𝑛−1∙ 𝛼𝑛−1+ ⋯ + 𝑎1∙ 𝛼 + 𝑎0 = 0 ( 24 )
Según el Teorema fundamental del algebra, ese polinomio tiene 𝑛 raíces 𝛼1, 𝛼2, … , 𝛼𝑛 en el
conjunto de los números complejos. La ecuación característica ( 24 ) se puede factorizar en 𝑛
factores lineales:
𝑎𝑛∙ 𝛼𝑛+ 𝑎𝑛−1∙ 𝛼𝑛−1+ ⋯ + 𝑎1∙ 𝛼 + 𝑎0= 𝑎𝑛∙ (𝛼 − 𝛼1) ∙ (𝛼 − 𝛼2) ∙ … ∙ (𝛼 − 𝛼𝑛) = 0 ( 25 )
Si las 𝑛 raíces de la ecuación característica son reales y distintas, la solución homogénea 𝑦ℎ(𝑡)
resulta en:
𝑦ℎ(𝑡) = 𝐶1∙ 𝑒𝛼1𝑡+ 𝐶2∙ 𝑒𝛼2𝑡+ ⋯ + 𝐶𝑛∙ 𝑒𝛼𝑛𝑡= ∑ 𝐶𝑖∙ 𝑒𝛼𝑖𝑡
𝑛
𝑖=1
( 26 )
Si las 𝑛 raíces de la ecuación característica son reales y repetidas, la solución homogénea 𝑦ℎ(𝑡)
resulta en:
𝑦ℎ(𝑡) = 𝑒𝛼1𝑡∙ (𝐶1+ 𝐶2∙ 𝑡 + 𝐶3∙ 𝑡2+ ⋯ + 𝐶𝑛∙ 𝑡𝑛−1) = 𝑒𝛼1𝑡∙ ∑ 𝐶𝑖∙ 𝑡𝑖−1
𝑛
(𝛼 − 𝛼1) ∙ (𝛼 − 𝛼2) = (𝛼 − (𝛿 + 𝑗𝜔)) ∙ (𝛼 − (𝛿 − 𝑗𝜔))
= (𝛼 − 𝛿 − 𝑗𝜔) ∙ (𝛼 − 𝛿 + 𝑗𝜔)
= (𝛼 − 𝛿)2− (𝑗𝜔)2
= (𝛼 − 𝛿)2+ 𝜔2
Si las 𝑚 =𝑛
2 raíces de la ecuación característica son complejas conjugadas:
𝛼1,2= 𝛿1± 𝑗𝜔1, … , 𝛼𝑛−1,𝑛 = 𝛿𝑚± 𝑗𝜔𝑚
, la solución homogénea 𝑦ℎ(𝑡) resulta en:
𝑦ℎ(𝑡) = 𝑒𝛿1𝑡∙ [𝐶11∙ 𝑒𝑗𝜔1𝑡+ 𝐶12∙ 𝑒−𝑗𝜔1𝑡] + 𝑒𝛿2𝑡∙ [𝐶21∙ 𝑒𝑗𝜔2𝑡+ 𝐶22∙ 𝑒−𝑗𝜔2𝑡] + ⋯ + 𝑒𝛿𝑚𝑡
∙ [𝐶𝑚1∙ 𝑒𝑗𝜔𝑚𝑡+ 𝐶𝑚2∙ 𝑒−𝑗𝜔𝑚𝑡]
= ∑ 𝑒𝛿𝑖𝑡∙ [𝐶𝑖1∙ 𝑒𝑗𝜔𝑖𝑡+ 𝐶𝑖2∙ 𝑒−𝑗𝜔𝑖𝑡]
𝑚
𝑖=1 ( 28 )
En el caso de 𝑛 = 2 la solución homogénea 𝑦ℎ(𝑡) = 𝑒𝛿1𝑡∙ [𝐶11∙ 𝑒𝑗𝜔1𝑡+ 𝐶12∙ 𝑒−𝑗𝜔1𝑡] se puede
transformar con la fórmula de Euler 𝑒±𝑗𝜔𝑡= cos(𝜔𝑡) ± 𝑗sen(ωt) a la siguiente forma:
𝑦ℎ(𝑡) = 𝑒𝛿1𝑡∙ [(𝑗𝐶11− 𝑗𝐶12) ∙ 𝑠𝑒𝑛(𝜔1𝑡) + (𝐶11+ 𝐶12) ∙ 𝑐𝑜𝑠(𝜔1𝑡)]
La solución homogénea 𝑦ℎ(𝑡) es una función real, los coeficientes del seno y coseno también
deben ser reales, por eso las constantes tienen que ser complejas conjugadas 𝐶1= 𝑎 + 𝑗𝑏 y
𝐶2= 𝑎 − 𝑗𝑏. Así los coeficientes del seno y coseno se convierten en números reales:
𝑗𝐶11− 𝑗𝐶12 = −2𝑏 = 𝐵1
𝐶11+ 𝐶12= 2𝑎 = 𝐵2
La solución homogénea 𝑦ℎ(𝑡) ahora se presente en su forma trigonométrica:
𝑦ℎ(𝑡) = 𝑒𝛿1𝑡∙ [𝐵1∙ sen(ω1𝑡) + 𝐵2∙ cos (𝜔1𝑡)]
𝑦ℎ(𝑡) = 𝐴𝑒𝛿𝑡sen(𝜔𝑑𝑡 + 𝜙)