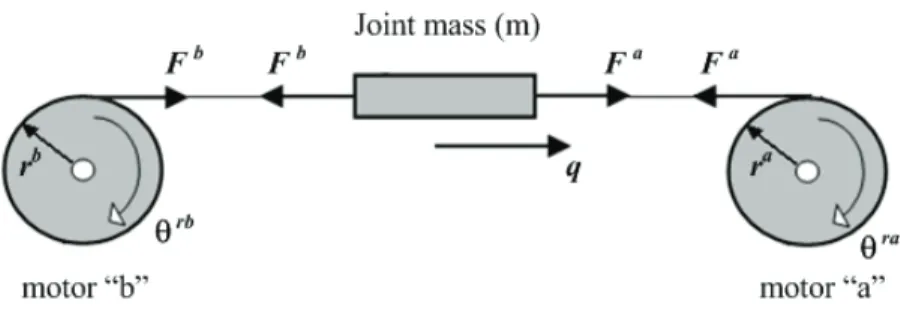
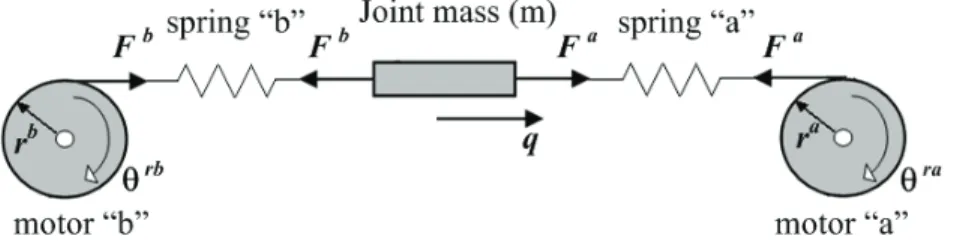
Control of compliant anthropomimetic robot joint
Texto
Imagem


Documentos relacionados
(This point of view is discussed in humans is poorly defined. As will be shown in Section V, greater detail in [4] and [5].) For example, if the meaning the conditional statement IF
In this section, it is described the experiment performed, which consists in the implementation of the cascade control with friction compensation proposed in Section (3) to a pla-
The paper is structured as follows: section 2 reviews the fun- damentals of the control methodology proposed in (Ramos, Alberto and Bretas, 2004a), and shows why it is not appli-
This paper is organized as follows: in section two we overview the basics of Implicit Regularization; the system- atic calculation of multiloop massless integrals is presented
In this work we presented a study concerning the modeling and formation control of a robotic system composed by two mobile robots, the leader robot and the follower robot.. It
O problema desta investigação se insere na análise das ações básicas da abordagem triangular que estiveram presentes nas práticas artístico-pedagógicas dos dois
In this section, we will consider what happens to per capita income in an economy that begins in steady state but then experiences a "shock.'' The shocks we will
In this section, dynamical model of a rigid satellite containing fluid rings is used to study the performance of attitude determination and control system.. The first
