Universidade Federal da Paraíba Centro de Tecnologia Programa de Pós-Graduação em Engenharia Mecânica
- Mestrado - Doutorado
CONTROLE DE VIBRAÇÃO DE UM SISTEMA SOB
DESBALANCEAMENTO ROTATIVO UTILIZANDO
ATUADOR DE LIGA COM MEMÓRIA DE FORMA
por
Alberdan Santiago de Aquino
Tese de Doutorado apresentada à Universidade Federal da
Paraíba para obtenção do grau de Doutor
ALBERDAN SANTIAGO DE AQUINO
CONTROLE DE VIBRAÇÃO DE UM SISTEMA SOB
DESBALANCEAMENTO ROTATIVO UTILIZANDO
ATUADOR DE LIGA COM MEMÓRIA DE FORMA
Tese apresentada ao curso de
Pós-Graduação
em
Engenharia
Mecânica da Universidade Federal
da Paraíba, em cumprimento às
exigências para obtenção do Grau
de Doutor.
Orientador : Professor Dr. Antonio Almeida Silva
Orientador : Professor Dr. José Antônio Riul
A657c Aquino, Alberdan Santiago de.
Controle de vibração de um sistema sob desbalancea-mento rotativo utilizando atuador de liga com memória de forma / Alberdan Santiago de Aquino.- João Pessoa, 2011. 134f. : il.
Orientadores: Antonio Almeida Silva, José Antônio Riul Tese (Doutorado) – UFPB/CT
1. Engenharia Mecânica. 2. Controle de vibrações. 3. Controle de sistemas. 4. Ligas com Memória de Forma. 5. Variação de temperatura.
DEDICATÓRIA
AGRADECIMENTOS
A minha filha Alícia, que mesmo na ausência do pai, sabia que algo de bom estava acontecendo em nossas vidas.
A minha esposa Eudna Maria (Baby) e minha irmã Artemis pelo incentivo que me deram durante esse período.
Ao meu orientador professor Antonio Almeida Silva, pela dedicação, competência, e pela incansável vontade de ver o progresso do trabalho.
Aos meus amigos Jader, Everaldo, James, Magno, Francisco França, pelo apoio, amizade, pelas sugestões, e principalmente pelos momentos de descontração, imprescindíveis no decorrer do trabalho.
Ao professor José Antônio Riul, pela orientação, e pelas sugestões sempre, sempre oportunas.
Ao professor Carlos José de Araújo pela contribuição direta no desenvolvimento da pesquisa.
Ao professor Cícero da Rocha Souto, pela ajuda sempre que solicitada.
CONTROLE
DE
VIBRAÇÃO
DE
UM
SISTEMA
SOB
DESBALANCEAMENTO ROTATIVO UTILIZANDO ATUADOR DE
LIGA COM MEMÓRIA DE FORMA
RESUMO
O controle de vibrações é um campo de estudo bastante relevante dentro da Engenharia Mecânica cujo principal objetivo reside na atenuação e controle das vibrações de um sistema. Existem técnicas e métodos variados que permitem o controle de vibrações, e dentre estas existem aquelas que utilizam os absorvedores dinâmicos de vibração. Neste contexto, as Ligas com Memória de Forma (LMF) podem ser usadas na forma de atuadores que auxiliam no controle ativo de estruturas devido à sua capacidade de variação da rigidez e amortecimento. As LMF fazem parte de um grupo de materiais metálicos que apresentam a propriedade de retornar à sua forma original após uma deformação mecânica, através de uma transformação de fase obtida por meio de um procedimento térmico. Ligas metálicas constituídas por Níquel e Titânio (NiTi), podem gerar forças consideráveis após a mudança de forma, rigidez e amortecimento, através da variação da temperatura. Nesta tese, é implementado um controlador Fuzzy para reduzir os níveis de vibração de um sistema massa-mola simulando um rotor desbalanceado utilizando-se um atuador de liga com memória de forma. Resultados teóricos e experimentais do sistema sendo controlado em regiões críticas são apresentados, onde se observaram reduções nos níveis da ordem de até 85% na região de ressonância.
VIBRATION CONTROL OF A SYSTEM UNDER UNBALANCED
ROTATING USING SHAPE MEMORY ALLOY ACTUATOR
ABSTRACT
The vibration control is an important field of study within mechanical engineering, whose main objective is to reduce and control the vibration of a system. There are various techniques and methods for vibration control, and among them are those using dynamic vibration absorbers In this context, Shape Memory Alloys (SMA) can be used as actuators that help the active control of structures due to their ability to change the stiffness and damping. The SMA is part of a group of metallic materials which have the property returned to its original shape after mechanical deformation through a phase transition obtained by a thermal process. Metal alloys consisting of nickel and titanium (NiTi) can generate significant forces behind the change of shape, stiffness and damping temperature variation. In this thesis, we implement a fuzzy controller to reduce vibration of unbalanced rotating system using shape memory alloy actuator. Theoretical and experimental results of the system, controlled in critical regions, are presented, where level reductions of about 85% in the resonance region were observed.
SUMÁRIO
Lista de Figuras ... xi
Lista de Tabelas ... xv
Lista de Símbolos ... xvi
1 INTRODUÇÃO 1.1 JUSTIFICATIVA... 2
1.2 OBJETIVO GERAL... 3
1.3 OBJETIVOS ESPECÍFICOS... 3
1.4 ESTRUTURA DO TRABALHO... 4
2 REVISÃO BIBLIOGRÁFICA 2.1 INTRODUÇÃO... 5
2.2 ÁREAS DE APLICAÇÃO E SUAS LIMITAÇÕES... 5
2.3 ABSORVEDORES DE VIBRAÇÃO COM RIGIDEZ VARIÁVEL... 10
2.4 FUNDAMENTOS DAS LIGAS COM MEMÓRIA DE FORMA... 20
2.4.1 Transformação de fases nas ligas com memória de forma... 21
2.4.2 Efeito memória de forma... 24
2.4.3 Comportamento das LMF sob ciclagem termomecânica... 25
2.4.4 Métodos de determinação das temperaturas de transformação em ligas com memória de forma... 27
2.5 CONSIDERAÇÕES FINAIS... 31
COM MEMÓRIA DE FORMA...
3.3 FAIXAS DE TEMPERATURAS DE TRANSFORMAÇÃO... 35
3.4 MODELO PARA CÁLCULO DE RIGIDEZ VARIÁVEL... 37
3.5 CARACTERISTICAS DE AMORTECIMENTO EM LIGAS COM MEMÓRIA DE FORMA... 42
3.6 CONSIDERAÇÕES FINAIS... 43
4 MODELO TEÓRICO 4.1 MODELAGEM TEÓRICA... 45
4.2 RESULTADOS SIMULADOS... 48
4.3 CONSIDERAÇÕES FINAIS... 51
5 BANCADA EXPERIMENTAL 5.1 INTRODUÇÃO... 52
5.2 DADOS DO SISTEMA... 53
5.2.1 Massa do sistema... 53
5.2.2 Rigidez do sistema... 54
5.2.3 Amortecimento do sistema... 55
5.3 SISTEMA DE AQUECIMENTO DA MOLA DE LMF... 58
5.4 SISTEMA DE RESFRIAMENTO DA MOLA DE LMF... 60
5.5 SENSOR DE TEMPERATURA... 61
5.6 MOTOR EXCITADOR ... 64
5.7 RESULTADOS EXPERIMENTAIS... 65
5.8 CONSIDERAÇÕES FINAIS ... 67
6 CONTROLE DO SISTEMA 6.1 INTRODUÇÃO ... 68
6.2 CONTROLADOR ... 71
6.2.1 Fuzzyficação... 73
6.2.2 Inferência fuzzy... 77
6.2.3 Defuzzyficação... 79
7 RESULTADOS
7.1 INTRODUÇÃO ... 85
7.2.1 Caso 1 – Sistema excitado com 14 Hz ... 86
7.2.2 Caso 2 – Sistema excitado com 17 Hz ... 87
7.2.3 Caso 3 – Sistema sem controle de temperatura e excitado com 14 Hz e 17 Hz intercalados ... 88
7.2.4 Caso 4 – Sistema com controle de temperatura e excitado com 14 Hz e 17 Hz intercalados... 90
7.2.5 Caso 5 – Sistema sem controle de temperatura e freqüência de excitação variando entre 0 e 23 Hz ... 92
7.2.6 Caso 6 – Sistema com controle de temperatura e freqüência de excitação variando entre 0 e 23 Hz ... 94
8 CONCLUSÕES E SUGESTÕES 8.1 CONCLUSÕES... 97
8.2 SUGESTÕES... 99
REFERÊNCIAS BIBLIOGRÁFICAS... 100
LISTA DE FIGURAS
Figura 2.1 Diagrama de densidade energética indicando a faixa de atuação em
termos de tensão x deformação de diferentes materiais ativos... 6
Figura 2.2 Diagrama de densidade energética em função da freqüência de atuação para diferentes materiais ativos... 7
Figura 2.3 Endoscopia utilizando LMF como atuador... 8
Figura 2.4 Aerofólio com LMF... 8
Figura 2.5 Avião da Boeing com turbina de geometria variável do elemento de descarga de gases... 9
Figura 2.6 Atuador com mola LMF... 9
Figura 2.7 Absorvedor de vibrações sintonizado (TVA) e sua resposta em freqüência... 10
Figura 2.8 Absorvedor de vibrações sintonizado adaptativo... 11
Figura 2.9 Resposta do sistema primário excitado na primeira freqüência... 12
Figura 2.10 Absorvedor de estado comutado... 13
Figura 2.11 Aceleração da base para excitação forçada de 4,5 e 5,5 Hz... 13
Figura 2.12 ATVA LMF com sistema primário montado sobre o shaker... 14
Figura 2.13 Aceleração do sistema primário para mudanças de freqüência de excitação em degrau... 14
Figura 2.14 Composição experimental para obtenção da resposta dinâmica da viga SMAHC... 15
Figura 2.15 Resposta dinâmica da viga SMAHC... 16
Figura 2.16 Controle da deflexão transversal em tubos de aço... 16
Figura 2.17 Sistema de isolação massa-mola de LMF... 17
Figura 2.18 Esquema de sistema dinâmico eixo-rotor para controle de vibrações em mancal LMF... 18
Figura 2.19 Curvas típicas de deformação versus temperatura de ligas NiTi... 19
Figura 2.21 Transformação da estrutura cristalina sob variação de temperatura.... 23
Figura 2.22 Transformação da estrutura martensitica sob carregamento mecânico... 23
Figura 2.23 Diagrama tensão-deformação-temperatura para LMF... 25
Figura 2.24 Carregamento térmico cíclico (50 ciclos) de um fio de Níquel-Titânio sob tensão constante de 150MPa... 26
Figura 2.25 Resposta pseudo-elástica de um fio de NiTi com AF=65ºC, ciclado na temperatura de 70ºC... 27
Figura 2.26 Representação esquemática de um DSC... 28
Figura 2.27 Curva esquemática de um DSC para uma LMF mostrando as curvas de transformação e o calor latente associado durante o aquecimento e resfriamento... 29
Figura 2.28 Curva DSC para liga rica em Níquel mostrando dois estágios de transformação... 29
Figura 2.29 Esquema do teste de RE... 30
Figura 2.30 Resistência elétrica normalizada vs. Temperatura para liga NiTi... 31
Figura 3.1 Mola helicoidal de compressão... 34
Figura 3.2 Mola de LMF Ni-Ti... 35
Figura 3.3 Amostra da Liga de NiTi submetida ao ensaio de DSC... 36
Figura 3.4 Amostra no DSC... 36
Figura 3.5 Temperaturas de transformação obtidas pelo DSC... 37
Figura 3.6 Mola de LMF montada para ensaio de compressão... 39
Figura 3.7 Rigidez da mola de LMF em função da temperatura... 41
Figura 3.8 Mudança no amortecimento para LMF... 43
Figura 3.9 Relação entre fator de amortecimento e temperatura para liga TiNi... 43
Figura 4.1 Sistema rotativo desbalanceado com 1gdl ... 45
Figura 4.2 Energia dissipada por ciclo... 47
Figura 4.3 Resposta em freqüência teórica do sistema para a mola a 35°C e 65°C... 50
Figura 4.4 Resposta em freqüência teórica em função da temperatura da mola 51 Figura 5.1 Esquema da bancada experimental... 53
Figura 5.2 Sistema rotativo desbalanceado... 54
Figura 5.4 Resposta impulsional a 65ºC... 56
Figura 5.5 Variação do coeficiente de amortecimento em função da temperatura... 58
Figura 5.6 Sinal PWM com largura de pulso de 40%... 59
Figura 5.7 Circuito amplificador para aquecimento da mola de LMF... 59
Figura 5.8 Curvas de aquecimento da mola de LMF com diversas larguras de pulso do sinal... 60
Figura 5.9 Direcionador do fluxo de ar sobre a mola... 60
Figura 5.10 Circuito amplificador de tensão de alimentação do motor do direcionador de ar... 61
Figura 5.11 Circuito divisor de tensão... 62
Figura 5.12 Curva de calibração do NTC ... 63
Figura 5.13 Diagrama de blocos para obtenção da temperatura da LMF... 64
Figura 5.14 Relação entre tensão aplicada e frequencia de excitação do motor... 64
Figura 5.15 Resposta em freqüência do sistema para mola a 35°C e a 65°C ... 66
Figura 5.16 Resposta em freqüência experimental em função da temperatura da mola... 67
Figura 6.1 Diagrama de blocos do controle de temperatura da mola LMF ... 69
Figura 6.2 Resposta em freqüência teórica do sistema... 69
Figura 6.3 Resposta em freqüência do sistema com controle de temperatura da mola de LMF... 70
Figura 6.4 Variável ERRO e seus termos lingüísticos para o aquecimento... 74
Figura 6.5 Variável ERRO e seus termos lingüísticos para o resfriamento... 75
Figura 6.6 Variável VERRO e seus termos lingüísticos... 75
Figura 6.7 Variável saída de resfriamento e seus termos lingüísticos... 76
Figura 6.8 Variável saída de aquecimento e seus termos lingüísticos... 76
Figura 6.9 Exemplo de regra de estratégia de controle ... 79
Figura 6.10 Fuzzificação para Erro= - 7,5°C ... 80
Figura 6.11 Fuzzificação para Verro= 0,5°C ... 81
Figura 6.12 Defuzzificação de acordo com o centro de máximo ... 82
Figura 6.13 Superfície de controle para variável de saída “aquecimento” ... 83
Figura 7.1 Vibração do sistema sem e com a ação de controle para um degrau
de aquecimento... 86
Figura 7.2 Vibração do sistema sem e com a ação de controle para um degrau de resfriamento... 87
Figura 7.3 Sinal de excitação nas freqüências 14 Hz e 17 Hz... 89
Figura 7.4 Vibração do sistema sem controle nas freqüências 14 Hz e 17 Hz... 90
Figura 7.5 Temperatura da mola para as situações do caso 3... 90
Figura 7.6 Vibração do sistema sob ação de controle, com freqüências de excitação de 14Hz e 17Hz... 91
Figura 7.7 Sinal de referência de temperatura e temperatura da mola, na ação de controle... 92
Figura 7.8 Sinal de excitação variando linearmente de 0 a 23 Hz e vice-versa... 93
Figura 7.9 Vibração do sistema sem ação de controle quando submetido a uma freqüência de excitação de 0 Hz a 23 Hz... 94
Figura 7.10 Vibração do sistema com ação de controle quando submetido a uma freqüência de excitação de 0 Hz a 23 Hz... 95
LISTA DE TABELAS
Tabela 3.1 Rigidez da mola LMF para o aquecimento e resfriamento... 40
Tabela 4.1 Parâmetros de amortecimento em função da temperatura... 48
Tabela 4.2 Dados da simulação... 49
Tabela 5.1 Dados da mola utilizada no experimento... 54
Tabela 5.2 Amortecimento do sistema em função da temperatura... 57
Tabela 5.3 Resultados experimentais da calibração do NTC ... 63
Tabela 5.4 Dados do experimento... 65
Tabela 6.1 Termos lingüísticos para o ERRO... 73
Tabela 6.2 Termos lingüísticos para a VERRO... 74
Tabela 6.3 Base de regras lingüísticas para o aquecimento... 77
LISTA DE SÍMBOLOS
A Identificação da fase austenítica
AS Temperatura inicial da fase austenitica
AF Temperatura final da fase austenitica
A1 Amplitude do primeiro pico
An Amplitude do pico do período n
c Amortecimento
cLMF Amortecimento da liga com memória de forma
cmax Amortecimento máximo
cmin Amortecimento mínimo
D Diâmetro da mola
d Diâmetro do arame da mola
dx Desbalanceamento
F Força da mola
F0 Força de excitação
G Módulo de elasticidade transversal
i Indicador de número complexo
kLMF-A Rigidez da mola durante a fase de aquecimento
kLMF-R Rigidez da mola durante a fase de resfriamento
k Rigidez da mola
kmax Rigidez máxima da mola LMF
kmin Rigidez mínima da mola LMF
M Identificação da fase martensítica
MF Temperatura final da fase martensitica
MS Temperatura inicial da fase martensitica
m Massa do sistema
md Massa desbalanceada
n número de períodos
P Período
R Resistência elétrica
R Identificação da fase R
RF Temperatura final da fase rhombohedral
RS Temperatura inicial da fase rhombohedral
R0 Resistência elétrica na temperatura ambiente
T Temperatura da mola
Tamb Temperatura ambiente
t Tempo
Vi Tensão do circuito divisor
X Módulo da amplitude de deslocamento
x Deslocamentos da massa do sistema
y Deflexão da mola
∆k Diferença entre rigidez máxima e rigidez mínima
β Constante térmica do NTC µ Fator de perda
ω Velocidade angular, Frequencia de excitação ωd Frequencia natural amortecida
ωn Frequencia natural
ξA Fração de austenita da liga ξM Fração de martensita da liga
CAPÍTULO I
INTRODUÇÃO
A presença de vibrações em máquinas e equipamentos é normalmente caracterizada como um problema sério em diversas aplicações. Nestas situações, um sistema de controle de vibração é aplicado com o intuito de reduzir os danos provenientes de níveis de vibração mais altos. Basicamente sistemas de controle de vibração podem ser divididos como passivos e ativos (AHL’EN et al, 1994; AHMAD et al, 2000; CHEN et al, 2004; FLEMING et al, 2005).
Os métodos de controle passivo de vibrações lidam diretamente com as propriedades físicas da máquina, como a rigidez, massa e amortecimento. O controle passivo de vibrações deve agir com uma mudança estrutural básica, o uso de outros materiais, ou a adição de um elemento passivo, que é um elemento cuja função não depende de uma fonte de energia externa.
Técnicas passivas apresentam, no entanto, dificuldades de implementação em regiões de baixa freqüência (FULLER et al, 1990). Além disso, em muitas aplicações é desejável que o sistema tenha baixos valores da massa, fazendo com que sistemas de controle de vibração passivos não sejam atrativos (BRENNAM et al, 1992), isto devido a uma tendência crescente na fabricação de engenharia de sistemas para reduzir o peso de estruturas mecânicas, principalmente em sistemas utilizados para locomoção como navios e aeronaves, podendo reduzir substancialmente os custos usando materiais mais leves (MOHEIMANI et al, 2003). Por outro lado, a redução de massa em máquinas e equipamentos pode resultar em estruturas mais flexíveis que o desejado, gerando uma limitação da performance desta estrutura.
de controle. É baseado no uso de sensores, eletrônica de tratamento de sinais e eletrônica de controle diretamente ligada aos atuadores, fazendo com que todos os erros possíveis que possam ocorrer numa máquina sejam antecipados e compensados.
O atuador utilizado no controle de vibrações é um elemento que produz uma força capaz de reduzir os níveis de vibração. A variedade de atuadores utilizados em sistemas de controle de vibração é muito grande, e o emprego do atuador depende principalmente do equipamento ou maquinário (variável de projeto) e das características do ambiente de instalação (umidade, atmosfera explosiva). Podem ser encontrados atuadores de movimento induzido por cilindros pneumático ou cilindros hidráulicos, motores elétricos, atuadores piezoeléticos, e mais recentemente atuadores de ligas com memória de forma. As ligas com memória de forma têm grande potencial de aplicação em situações que envolvem grandes forças, grandes deformações e baixas freqüências. Como atuadores, as ligas com memória de forma podem ser aplicadas para controle de forma (SANDERS et al, 2004; CHANDRA, 2001) e para controle de vibração em máquinas e estruturas (ZAK et al, 2003; OH et al, 2001; SAADAT et al, 2001).
1.1 JUSTIFICATIVA
Um sistema com um grau de liberdade pode ser entendido como um dispositivo que tem apenas uma massa representativa e que esta massa possui apenas um movimento possível, sendo este movimento de translação ou rotação. Quando forças externas atuam sobre este sistema, o mesmo fica submetido à vibrações mecânicas que são aceitáveis até determinadas amplitudes, e devem se manter assim para um bom funcionamento e vida útil do equipamento. No entanto, as excitações podem provocar um aumento dos níveis de vibração até níveis indesejáveis, principalmente quando o sistema entra em ressonância com a freqüência natural do equipamento (ωn).
O controle da variação de rigidez pode ser aplicado utilizando alguns dispositivos, sejam eles pneumáticos, eletromagnéticos, ou ainda utilizando materiais inteligentes, as Ligas com Memória de Forma (LMF).
Diante deste contexto, se faz necessária uma investigação mais aprofundada com o objetivo de reduzir e controlar vibrações mecânicas utilizando Ligas com Memória de Forma (LMF) por meio da mudança da freqüência natural do sistema.
1.2 OBJETIVO GERAL
Desenvolver um sistema com um grau de liberdade apoiado sobre uma mola com propriedades de memória de forma, que será utilizada como atuador, objetivando o controle dos níveis de vibração em determinadas faixas de freqüências consideradas críticas.
1.3 OBJETIVOS ESPECÍFICOS
Para atingir o objetivo geral, será necessário desenvolver e implementar os seguintes objetivos específicos:
• Projetar e confeccionar uma mola helicoidal com memória de forma a partir de fios de Níquel-Titânio (Ni-Ti);
• Realizar treinamento na mola para que a mesma tenha memória de forma reversível;
• Caracterizar as temperaturas de transformação da mola de Ni-Ti; • Caracterizar a rigidez da mola de Ni-Ti em função da temperatura;
• Confeccionar o sistema com um grau de liberdade, excitado harmonicamente por um motor desbalanceado;
• Desenvolver um sistema de controle de temperatura, incluindo a montagem de circuitos e placas de aquisição;
• Testar experimentalmente o sistema de controle para diferentes condições de excitação;
• Avaliar o desempenho do sistema controlado e concluir sobre a sua possível
1.4 ESTRUTURA DO TRABALHO
CAPÍTULO II
REVISÃO BIBLIOGRÁFICA
2.1 INTRODUÇÃO
As manutenções preventiva e preditiva de equipamentos podem ser feitas através de um sistema supervisório computadorizado ou de monitoramento onde todas as variáveis que interferem no funcionamento de uma máquina são monitoradas em tempo real. Variáveis como pressão, temperatura e vibração são controlados de tal forma que a vida útil dos equipamentos seja bastante estendida visando a redução de custos com paradas e serviços desnecessários. O monitoramento e controle de vibrações neste caso podem ser feitos de diversas maneiras, sejam elas de forma passiva com o uso de iso-amortecedores e absorvedores dinâmicos, ou de forma ativa, onde são usadas plantas eletrônicas de controle que comandam atuadores que podem ser magnéticos, piezo-elétricos, hidráulicos e mais recentemente aqueles baseados em materiais inteligentes como os fluidos magneto-reológicos e as ligas com memória de forma ou internacionalmente denominadas de Shape Memory Alloys (SMA).
2.2 ÁREAS DE APLICAÇÃO PARA LMF E SUAS LIMITAÇÕES
Segundo LAGOUDAS (2008), dois parâmetros são importantes quando da escolha do material do atuador: a densidade energética (capacidade de produção de trabalho por unidade de volume) e a faixa de freqüência do material. O ideal seria ter um material ativo com uma elevada densidade energética e de uma alta resposta em freqüência.
As Figuras 2.1 e 2.2 apresentam, respectivamente, dois diagramas representativos das faixas de atuação da densidade energética e das freqüências de alguns materiais ativos. É possível verificar pelas figuras que os atuadores de LMF são considerados os de maior capacidade de produção de trabalho mecânico por volume de material em comparação com outros materiais utilizados como atuadores. Além disso, os atuadores de LMF têm a capacidade de recuperação de sua forma quando a temperatura é aumentada, mesmo sob altas cargas aplicadas, bem como absorver e dissipar energia mecânica quando das mudanças reversíveis de forma, sendo assim considerados como bons atuadores quando se trata de amortecer vibrações e absorver impactos.
No entanto, as LMF têm baixas freqüências de resposta em relação à maioria dos outros materiais ativos, reduzindo assim seu uso às situações onde as faixas de freqüência em análise são baixas. Para freqüências acima de 10 Hz (10Hz – 1000HZ), é mais viável o uso de LMF magnéticas. (LAGOUDAS, 2008).
Figura 2.2 – Diagrama de densidade energética em função da freqüência de atuação para diferentes materiais ativos. (LAGOUDAS, 2008)
As Ligas com Memória de Forma são úteis em diversas situações quando trabalham como atuadores, alterando a forma, rigidez, posição, freqüência natural, e outras características mecânicas, em resposta a temperatura ou campos eletromagnéticos. O potencial dessas ligas na condição de atuadores vem sendo ampliado em diversas áreas científicas, como por exemplo, em sistemas eletromecânicos, controle de vibrações, indústria civil, aeronáutica e também na medicina.
Figura 2.3 – Endoscopia utilizando LMF como atuador. (HAGA et al, 2005)
A indústria aeronáutica também tem utilizado protótipos de estruturas flexíveis inteligentes atuadas por LMF. A empresa Lockheed Martin desenvolveu um protótipo de aerofólio flexível atuado por fios de LMF, com o objetivo de substituir os flaps atualmente utilizados em aviões. Os fios atuadores são aquecidos pela passagem de corrente elétrica externa. Primeiramente, o aerofólio encontra-se numa posição neutra, sem atuação. Depois, o atuador é aquecido, encurtando o seu tamanho e puxando para baixo a parte traseira do aerofólio. Neste caso, quando o atuador esfria, a parte traseira volta para a posição de neutralidade.
Figura 2.4 – Aerofólio com LMF. (LOCKHEED MARTIN, 2006)
(MABE et al, 2006), conforme indica a Fig. 2.5. Nesta aplicação as vigas de LMF dobram as bordas em “V” durante o vôo a baixa altitude e baixa velocidade de vôo, aumentando assim a mistura de gases e reduzindo o ruído gerado. Durante velocidades e altitudes de cruzeiro, os componentes de LMF esfriam, alinhado a forma de “V” que resulta no aumento do desempenho do motor.
Figura 2.5 – Avião da Boeing com turbina de geometria variável do elemento de descarga de gases (MABE et al, 2006)
Um tipo comum de atuador com memória de forma, consiste em colocar uma mola de LMF balanceada contra uma mola de material convencional de modo que quando o dispositivo é aquecido, a mola de LMF vence a resistência da mola convencional, empurrando um pistão em uma determinada direção. Por outro lado, quando o dispositivo é resfriado, a mola com memória de forma sofre uma transformação de fase, sendo comprimida pela ação da mola convencional, o que empurra o pistão na direção oposta. Este tipo de atuador é apresentado esquematicamente na Fig. 2.6 e tem inspirado um grande número de aplicações.
(a) esfriando (b) aquecendo
Figura 2.6 – Atuador com mola LMF. (Adaptado de HODGSON & BROWN, 2000)
2.3 ABSORVEDORES DE VIBRAÇÃO COM RIGIDEZ VARIÁVEL
Os absorvedores dinâmicos e amortecedores de massa sintonizados são os principais dispositivos para aplicações de controle de vibrações estruturais.
O TVA (Tuned Vibration Absorber) ou absorvedor de vibrações sintonizado é um sistema clássico de controle passivo de vibrações, conforme ilustrado na Fig. 2.7-a (INMAN, 2001). Este sistema atenua bastante as vibrações do sistema primário. Um absorvedor dinâmico passivo trabalha eficientemente em freqüências de projeto pré-determinadas, como mostrado na Fig. 2.7-b, onde os níveis de vibração numa região de ressonância podem ser atenuados para valores próximos a zero, onde a relação entre a freqüência de excitação e freqüência natural é próxima da unidade.
(a) Absorvedor de Vibrações
Sintonizado (TVA)
(b) Magnitude dos deslocamentos da massa primária versus a relação de freqüências Figura 2.7 – Absorvedor de vibrações sintonizado (TVA) e sua resposta em freqüência.
(Adaptado de INMAN, 2001)
No entanto esta solução para redução nos níveis de vibração não pode ser usada em casos de freqüências de excitação desconhecidas ou variáveis. Esta dificuldade pode ser resolvida se o sistema se adaptar às freqüências de excitação. Esta adaptação pode ser realizada com a incorporação de elementos atuadores, transformando desta forma o sistema em um ATVA (Adaptive Tuned Vibration Absorber) ou absorvedor de vibrações sintonizado adaptativo (Fig. 2.8).
0 0.5 1 1.5 2
0 0.5 1 1.5 2 2.5 3 A m p li tu d e n o rm a li z a d a
Relação de frequencias
K c
Figura 2.8 – Absorvedor de vibrações sintonizado adaptativo. (NWOKAH e HURMUZLU, 2001)
Neste tipo de sistema, além dos componentes comuns dos absorvedores de vibração, existe um atuador que interfere nas amplitudes de vibração. Este atuador deve estar aliado com um sistema de controle com o intuito de melhorar a resposta em relação aos absorvedores convencionais. NWOKAH e HURMUZLU (2001) mostraram numericamente a redução significativa dos níveis de vibração na região em torno da freqüência natural da massa principal, quando da aplicação de um controle realimentado.
(a) TVA (b) ATVA-LMF
Figura 2.9 – Resposta do sistema primário excitado na primeira freqüência (PAULA e SAVI, 2008)
DIAS e CUNHA Jr. (2008) conceberam e simularam numericamente um ATVA usando LMF. As simulações foram realizadas para um sistema com dois graus de liberdade. Neste caso, variou-se a freqüência natural do sistema secundário com o intuito de sintonizar com a freqüência natural do sistema primário para reduzir os níveis vibrações deste último. O elemento rígido de ligação entre os sistemas primário e secundário foi uma mola de LMF. Através da variação da temperatura foi possível a variação da freqüência natural da massa secundária, resultando numa diminuição das amplitudes de vibração.
HOLDHUSEN (2008) fez uso do SSA (State-Switched Absorber) para controle de vibrações, onde o SSA é uma variação do ATVA. Segundo o autor, o SSA é um sistema capaz de mudar rapidamente entre as freqüências de ressonância quando comparado com os clássicos TVA´s. O experimento elaborado considerou uma massa base apoiada sobre quatro molas helicoidais, e uma massa absorvedora apoiada sobre molas em cima da massa principal, conforme esquematizado na Fig. 2.10. O estudo considera que a performance do SSA para reduzir vibrações está baseada em um sistema onde a rigidez varia assumindo dois valores, que são comutados nas situações de ligado e desligado. Na situação em que o comutador da mola está desligado, a mola com rigidez adicional (kb), trabalha livremente
Figura 2.10 – Absorvedor de estado comutado. (Adaptado de HOLDHUSEN, 2008)
A Fig. 2.11 mostra que quando o estado de comutação é habilitado no sistema, a vibração em termos de amplitudes da base é reduzida em torno de 55% na freqüência crítica. Esta mesma analogia pode ser utilizada com os materiais com memória de forma, onde a mola possua a capacidade de rigidez variável. Cada evento de comutação é representado por “+” na figura.
Figura 2.11 – Aceleração da base para excitação forçada de 4,5 e 5,5 Hz (HOLDHUSEN, 2008)
Comutador da mola
Massa base Massa absorvedora
Rigidez adicional
k k
ka
kb
m
WILLIAMS et al (2005), coletaram dados experimentais de um sistema ATVA com dois graus de liberdade. O sistema era formado por duas vigas, sendo uma de aço (sistema primário) e outra viga composta por três pares de barras circulares de LMF (sistema absorvedor), com massas na extremidade de cada viga, conforme mostrado na Fig. 2.12.
Figura 2.12 – ATVA LMF com sistema primário montado sobre o shaker. (WILLIAMS et al, 2005)
O sistema mostrado na Fig. 2.12 foi excitado com o ATVA e sem o mesmo, apenas para fins de comparação entre as duas situações.
A viga de LMF foi aquecida por meio de corrente elétrica e o resfriamento se deu por convecção natural. Um dos resultados experimentais, ilustrado na Fig. 2.13, mostra que as amplitudes do sistema primário reduziram em 70% a amplitude de aceleração quando aplicada uma corrente elétrica para aquecimento da viga de LMF.
LIU et al (2005), fizeram um estudo teórico de um controle on-off de amortecimento tomando como base um sistema massa-mola-amortecedor com um grau de liberdade. Foram utilizados dois elementos Voigt em série representando a rigidez e amortecimento do sistema. A simulação comparou o sistema proposto com os sistemas convencionais de isolação de vibrações. Os resultados apresentados no artigo mostraram que o sistema de controle on-off de variação do amortecimento tiveram melhores resultados que o sistema convencional.
REIS et al (2010) realizaram experimentos com uma viga em balanço constituída de resina epóxi e 5 fios de LMF, denominada de SMAHC (Shape Memory Alloys Hybrid Composite). Os fios foram ativados progressivamente através de corrente elétrica para atenuar os níveis de vibração. Uma representação esquemática do aparato experimental é mostrado na Fig. 2.14.
Figura 2.14 – Composição experimental para obtenção da resposta dinâmica da viga SMAHC. (REIS et al, 2010)
Figura 2.15 – Resposta dinâmica da viga SMAHC. (REIS et al, 2010)
HEINONEN et al (2008) fizeram uso de tubos de aço como parte do elemento de rigidez, onde a relação diâmetro/comprimento foi de 8 para 1. Diametralmente no tubo foi instalado um fio de LMF, onde este controlava as deformações transversais através da mudança das condições de contorno resultando na mudança de rigidez do tubo (Fig. 2.16). Nesta configuração foi observado nos testes dinâmicos que a rigidez transversal do tubo aumentou em até 4,5 vezes com a ativação do fio de LMF de 23ºC a 70ºC.
Figura 2.16 – Controle da deflexão transversal em tubos de aço. (HEINONEN et al ,2008)
tubos foram submetidos a cargas de compressão e analisada a variação do amortecimento e a resposta da massa principal com deslocamentos na direção y. Os resultados obtidos mostram que a transmissibilidade foi reduzida em até 25% a depender da configuração ou número de tubos de LMF utilizados.
(a) (b)
Figura 2.17 – Sistema de isolação massa-mola de LMF. (Adaptado de LAGOUDAS, 2004)
No que se refere ao controle de vibrações em máquinas rotativas, as LMF também se fazem presente, como mostrado no estudo de HE et al (2007). O estudo consiste no controle de vibrações de um rotor desbalanceado montado sobre mancais de rolamento, visando a redução das amplitudes de vibração na passagem pelas freqüências de ressonância do sistema, onde o elemento de rigidez de um dos mancais é constituído de molas helicoidais de LMF, como representado na Fig. 2.18. O mancal de rigidez variável é composto por 12 molas de LMF distribuídas em grupo de 3 a cada 90º em torno do suporte do rolamento. No interior de cada mola existe uma barra que é aquecida por meio de corrente elétrica. Este aquecimento provoca uma mudança nos níveis de vibração do eixo quando o sistema passa pelas freqüências críticas. Os autores concluíram que é possível controlar vibrações em máquinas rotativas usando este conceito.
Tubos de LMF Massa
y x
x
y
shaker
Figura 2.18 – Esquema de sistema dinâmico eixo-rotor para controle de vibrações com mancal LMF. (Adaptado de HE et al, 2007)
SILVA e MESQUITA (2009) mostraram resultados de simulação numérica de um controle ativo de vibrações em máquinas rotativas ou rotores. Um eixo em rotação considerado no trabalho está montado sobre dois mancais cuja rigidez apresenta o comportamento das ligas com memória de forma. Com este comportamento, foi simulado um eixo com dois rotores desbalanceados e verificadas as amplitudes de vibração em alguns modos de vibração. Observou-se que o controle ativo reduziu os níveis de vibração em algumas situações estudadas; 99% para o primeiro rotor e 62% para o segundo rotor quando comparados com um sistema idêntico, mas sem controle de rigidez nos mancais.
Mesmo diante destes exemplos de bons resultados, as ligas com memória de forma apresentam uma limitação devido à histerese de temperatura que ocorre exatamente nos ciclos de aquecimento e resfriamento do material, onde esta diferença de temperatura geralmente varia de 10 a 50ºC. Enquanto que a histerese de temperatura nas LMF é uma característica positiva em algumas situações, como, por exemplo, em aplicações odontológicas, é indesejável no controle de vibrações. As curvas mostradas nas Figuras 2.19-a e 2.19-b representam o comportamento geral da deformação em função da temperatura das ligas com memória de forma. A histerese de temperatura destas ligas está representada por ∆T.
Ligas ortodônticas apresentam uma histerese grande, pois devem deformar pouco diante de grandes variações de temperatura, como mostra a Fig. 2.19-a. A deformação é pequena durante o resfriamento partindo da temperatura de austenita final (AF) para
martensita inicial (MS). Esta situação não é interessante para o controle de vibrações, Disco
L
ka
ca
m
Ya
Xa
e
L1
X
porque este controle está associado ao controle de temperatura. Quanto mais próximas as temperaturas de transformação (∆t pequeno), mais eficiente será o controle de vibrações. Portanto, uma histerese pequena (Fig. 2.19-b) é mais adequada no controle de vibrações.
(a) (b)
Figura 2.19 – Curvas típicas de deformação versus temperatura de ligas NiTi.
Uma das características das ligas com memória de forma é a presença de uma terceira fase, além das fases martensita e austenita como mostrado na Fig. 2.19. A fase R, ou fase Romboedral, pode ocorrer em ligas de Níquel-Titânio dependendo do tratamento térmico recebido, como observaram UCHIL et al. (1998) e LEI e WU (2008). O efeito memória de forma na fase R é pequeno, no entanto há uma significativa variação do módulo de elasticidade do material também documentado por LEI e WU (2008). Outro ponto bastante interessante se deve ao fato que a fase R acontece com pequena ou nenhuma histerese de temperatura. LEI e WU (2008) demonstraram ainda que a histerese de temperatura é da ordem de 2ºC em contraste com uma histerese de 20ºC em uma amostra idêntica, porém com tratamento térmico diferente. PELOSIN e RIVIERE (1998) apresentaram amostras sem ocorrência de histerese na fase R. A baixa histerese da fase R é uma característica atrativa do uso de ligas de Níquel-Titânio para aplicações de controle de vibrações, utilizando-se neste caso a variação do módulo de elasticidade do material.
Temperatura
MF
MS
AS AF
∆t
Temperatura
MF AS MS AF
∆t
Aquecimento Resfriamento Fase R
D
ef
or
m
aç
ão
D
ef
or
m
aç
2.4 FUNDAMENTOS DAS LIGAS COM MEMÓRIA DE FORMA
A descoberta de martensita em aços em torno de 1890 por Adolf Martens foi um passo importante para a eventual descoberta de ligas de memória de forma. A transformação martensita foi talvez o fenômeno metalúrgico mais estudado nos anos 1900. A transformação martensita, como observado no sistema Fe-C, foi estabelecido como um processo irreversível. O conceito de transformação martensítica termo elástica, que explica a reversibilidade martensítica, foi introduzida em 1949 por KURDJMOV e KHANDROS (1949), baseado nas observações experimentais da estrutura martensítica reversivelmente termo elástica nas ligas CuZn e CuAl. Em 1953, a ocorrência da transformação martensítica termo elástica foi demonstrada também em outras ligas como InTi.
A transformação martensítica reversível e as ligas que apresentam esta característica ficaram sem uso até 1963. O avanço para aplicações de engenharia ocorreu com a descoberta do Níquel-Titânio por BUEHLER (1963) juntamente com a equipe de trabalho, ao estudar materiais que seriam úteis para a proteção do calor. Percebeu-se que, além de suas boas propriedades mecânicas, comparável com alguns metais comuns da engenharia, o material também possuía uma capacidade de recuperação de forma. Seguindo esta observação, o termo "Nitinol" foi denominado para este material (NiTi) em homenagem a sua descoberta no Naval Ordnance Laboratory (NOL). O termo Efeito Memória de Forma (Shape Memory Effect – SME) foi dado devido ao comportamento de recuperação da forma. A descoberta do Nitinol reascendeu as pesquisas em torno das LMF. Os efeitos do tratamento térmico, a composição e a microestrutura foram amplamente investigados, começando a ser entendida neste período (JACKSON, 1972).
sistema NiTiNb em 1989, que era mais fácil de manusear, devido à sua maior histerese de temperatura. Ligas com Memória de Forma com transformações em alta temperatura, como TiPd, TiPt e TiAu (temperaturas acima de 100ºC), foram desenvolvidas (DOONKERSLOOT, 1970). MELTON e MERCIER, enquanto estudavam as propriedades de fadiga em 1978, mostraram que adicionando Cobre ao material não há mudanças consideráveis nas temperaturas de transformação. Depois em 1999, (MIYAZAKY, et al, 1999) mostrou que ligas de NiTiCu apresentam maior tempo de vida sujeito a fadiga. A associação entre a resistência à fadiga e o baixo custo do material torna esta liga adequada para uma variedade de aplicações na engenharia.
Desde a descoberta inicial do Nitinol em 1963, muitas aplicações comerciais tem sido desenvolvidas. Durante os anos 70, muitas aplicações biomédicas surgiram, mas foi na década de 90 que os stents foram feitos com o intuito comercial. Neste período, LMF tem encontrado outras aplicações como em ventilação, ar condicionado, cabos conectores eletrônicos, válvulas e uma variedade de outros produtos. Além disso, na última década, a demanda para controle e atuação nas condições de temperatura elevada, impulsionada pelas indústrias aeroespacial e de petróleo, reascendeu o interesse no desenvolvimento de HTSMAs (High Temperature Shape Memory Alloys). Finalmente, ligas que apresentam características de mudança de forma como as LMF, mas que atuam sob influencia de um campo magnético, vem sendo pesquisadas recentemente (ULLAKKO, et al, 1996 e KARACA, et al, 2006). As ligas com memória de forma magnética vêm se tornando fortes candidatas para utilização em equipamentos de atuação em altas freqüências de vibração mecânicas.
2.4.1. Transformação de fases nas ligas com memória de forma
Dentro de uma faixa de operação típica, uma LMF tem duas fases, cada uma com uma estrutura cristalina diferente e, portanto, diferentes propriedades. Uma fase acontece a alta temperatura, chamada de Austenita (A) e outra a baixa temperatura, chamada de
orientação, chamadas de variantes. Um conjunto de variantes martensíticas pode existir em duas formas: martensita maclada (MT), a qual é formada através de uma combinação de
variantes de martensita “auto-acomodadas” (Fig. 2.20-b), e martensita demaclada ou reorientada em que há uma variante martensitica especifica dominante (MD) mostrada na
Fig. 2.20-c (após carregamento mecânico). A reversibilidade de transformações da fase Austenita para Martensita e vice versa forma a base para o comportamento único das LMF.
(a) Austenita final (b) Martensita inicial (c) Martensita final Figura 2.20 – Estruturas cristalinas da LMF
As temperaturas que implicam nas transformações de fase das ligas com memória de forma, são estreitamente ligadas à composição da liga. Existem quatro temperaturas características e determinantes no fenômeno de mudança de fase. Considere uma liga com memória de forma sem carregamento mecânico e no estado completamente austenitico, onde a temperatura é indicada por AF, ou temperatura de austenita final (Fig. 2.21-a).
Nestas condições a liga é submetida a um resfriamento, onde as primeiras variantes de martensita começam a surgir quando a temperatura atinge o estado de martensita inicial indicada por MS (Fig. 2.21-b). Com a continuação do resfriamento, as variantes de
martensita aumentam em número, chegando à totalidade na liga na temperatura de martensita final ou MF (Fig. 2.21-c). Neste estágio, a transformação é completa e o material
está completamente na fase de martensita maclada. Similarmente, durante o aquecimento, a transformação reversa inicia na temperatura de austenita inicial AS (Fig. 2.21-d) e a
Figura 2.21 – Transformação da estrutura cristalina sob variação de temperatura
Se um carregamento mecânico é aplicado no material quando o mesmo se encontra na fase de martensita maclada ou na temperatura MF (Fig. 2.22-b), é possível demaclar
(reorientar) a martensita através da reorientação de certo número de variantes. O processo de demaclagem resulta em uma mudança de forma macroscópica, onde a deformação permanece quando o carregamento é retirado (Fig. 2.22-c).
Figura 2.22 – Transformação da estrutura martensítica sob carregamento mecânico
MF MF MF AS AF
(a) (b) (c) (d) (e)
R
egi
ão
ps
eudo-el
ás
ti
ca
MF AS AF
MS
AF
Um aquecimento subseqüente na LMF para uma temperatura acima de AF irá
resultar na transformação de fase reversa, ou seja, de martensita maclada para austenita (Fig. 2.22-e) e levará o material para forma original (Fig. 2.21-a). Resfriando de volta até uma temperatura abaixo de MF levará o material para formação de martensita maclada
novamente sem mudança de forma observada. O processo descrito acima é denominado Efeito Memória de Forma Simples(Shape Memory Effect).
2.4.2. Efeito memória de forma
Uma Liga com Memória de Forma apresenta Efeito de Memória de Forma (EMF) quando a mesma é deformada na fase martensita e depois retirada a força de deformação, em uma temperatura abaixo de MS. Quando é aplicado um aquecimento subseqüente acima
de AF a LMF irá retornar a forma original. A natureza do EMF pode ser melhor entendida
através de um diagrama tri-axial de Tensão-Deformação-Temperatura, como mostrado na Fig. 2.23. Esta figura representa os dados experimentais para uma amostra de Ni-Ti testada sob um carregamento axial. A tensão σ é a tensão axial aplicada na LMF. A deformação correspondente a esta tensão é representada pela sigla ε. Partindo da fase em que o corpo se encontra em baixa temperatura, ou na fase martensita maclada, (ponto B), é aplicada uma tensão para deformação a temperatura constante. Essa tensão chega ao nível de tensão inicial (σs), que inicia o processo de reorientação, resultando no aparecimento de variantes
martensíticas favoravelmente orientadas e outras variantes menos orientadas. O nível de tensão para reorientação é muito inferior a tensão de deformação plástica verdadeira da martensita. O processo de surgimento de martensita demaclada é completado quando o nível de tensão chega a σf, que é caracterizado pelo final do platô no diagrama σ-ε . O
Figura 2.23 – Diagrama tensão-deformação-temperatura típico de uma LMF
Sob aquecimento e na ausência de tensão, a transformação reversa se inicia quando a temperatura atinge AS (ponto E) e é completada na temperatura AF(ponto F), onde acima
deste o material está completamente austenítico. Na ausência de uma deformação plástica permanente gerada durante a demaclagem, a forma original da peça é obtida (ponto A). A deformação recuperada devido à transformação de fase da martensita para a austenita é denominada de deformação de transformação (εt). Um resfriamento subseqüente irá resultar na formação de variantes de martensita maclada de auto-acomodação sem mudança de forma associada, e o ciclo completo pode ser repetido. O fenômeno descrito acima é chamado de efeito memória de forma simples, ou simplesmente EMF, porque a recuperação da forma é realizada somente durante o aquecimento, após o material ter sido deformado por uma carga mecânica aplicada.
2.4.3 Comportamento das LMF sob ciclagem termomecânica
Até o momento foi comentado que a recuperação da forma ocorre apenas por um caminho: aquecimento. Algumas vezes uma Liga com Memória de Forma pode exibir mudança de forma sem carregamento mecânico, mas sujeito a um carregamento cíclico térmico. Este comportamento é chamado de duplo efeito memória de forma (TWSME). O TWSME pode ser observado em uma LMF que foi submetida a repetidos ciclos termomecânicos, processo este também conhecido como “treinamento”. Um número
εεεε σ
σσ
σ
σ
grande destes ciclos termomecânicos pode induzir mudanças na microestrutura, o qual causa mudanças macroscópicas permanentes no comportamento do material.
Vamos considerar o caso de um material que foi submetido a diversos ciclos térmicos idênticos (aquecimento e resfriamento), bem como a um carregamento constante de tensão (Fig. 2.24). Durante o primeiro ciclo térmico, só uma parte da deformação gerada no resfriamento é recuperada no aquecimento, restando assim alguma deformação plástica sob carga gerada no ciclo. Uma pequena deformação permanente aparece depois que cada ciclo térmico é completado. A adição de uma deformação permanente associada a cada ciclo consecutivo começa a diminuir gradualmente até que esse acúmulo se estabiliza, representado na Fig. 2.24 como ciclo final.
Figura 2.24 – Carregamento térmico cíclico (50 ciclos) de um fio de LMF Ní-Ti sob tensão constante de 150MPa (MILLER e LAGOUDAS, 2000)
Um comportamento semelhante pode ser observado no caso de uma ciclagem mecânica repetitiva no regime pseudoeleástico, até que a saturação ocorra (Fig. 2.25).
O comportamento TWSME também pode ser obtido através da adoção de diversas seqüências de treinamento (CONTARDO, et al, 1990 e MILLER e LAGOUDAS, 2000).
(por exemplo, trabalho em altas temperaturas ou sobrecarga mecânica), o TWSME será alterado (RODRIGUEZ e GUENIN, 1990).
Figura 2.25 – Resposta pseudo-elástica de um fio de NiTi com AF=65ºC, ciclado na
temperatura de 70ºC (MILLER e LAGOUDAS, 2000)
2.4.4 Métodos de determinação das temperaturas de transformação em ligas com memória de forma
Calorimetria exploratória diferencial (DSC)
LMF com a vantagem de utilizar uma pequena quantidade do material. O princípio de operação do DSC é a medição da taxa na qual a energia térmica fornecida para a amostra para manter um taxa constante de aquecimento ou resfriamento. O dispositivo é chamado de diferencial, porque tem a capacidade de monitorar a resposta de duas amostras e subtrair os resultados. No caso, as amostras se referem a dois recipientes, um vazio (referência) e outro com o material a ser analisado (Fig. 2.26). O material da amostra pode ser encapsulado em um ambiente inerte para evitar oxidação.
Figura 2.26 – Representação esquemática de um DSC
A Fig. 2.27 mostra uma resposta típica de DSC, que corresponde a potência (mW) requerida para manter constante a taxa de aquecimento ou resfriamento da amostra da LMF em função da temperatura. Quando a amostra é aquecida a partir do estado martensitico, a transformação austenítica se inicia em AS. A reação endotérmica durante a
Figura 2.27 – Curva esquemática de um DSC para uma LMF mostrando as curvas de transformação e o calor latente associado durante o aquecimento e resfriamento
(LAGOUDAS, 2008)
As temperaturas de transformação podem ser deslocadas e/ou aumentadas devido a energias mecânicas armazenadas no material (i.e. deformações introduzidas durante o processo de corte), ou até mesmo causar o surgimento de uma fase intermediária. Uma curva de DSC de uma LMF Ni-Ti rica em Níquel é mostrada na Fig. 2.28. Observa-se uma fase intermediária chamada de fase R na curva de resfriamento.
Figura 2.28 – Curva DSC para uma liga Ni-Ti rica em Níquel mostrando dois estágios de transformação (LAGOUDAS, 2008)
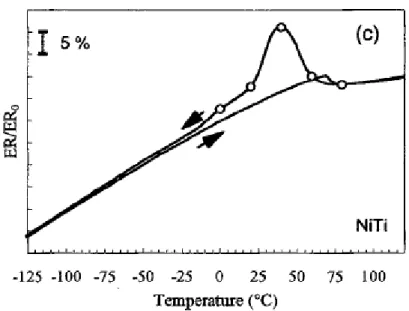
Teste de variação de resistência elétrica
corrente contínua estabilizada e fios internos são utilizados para captar a queda de tensão durante a ciclagem térmica. O conjunto é mergulhado em um banho térmico contendo óleo de silicone, onde a amostra é aquecida até temperaturas da ordem de 150ºC. Na Fig. 2.29 é mostrado um esquema do teste de variação de RE em função da temperatura.
Figura 2.29 – Esquema do teste de RE.
Durante o aquecimento da amostra, a fase martensítica se transforma para a fase austenítica, gerando variações importantes na diferença de potencial na LMF. Os dados da temperatura e da diferença de potencial são coletados por um sistema de aquisição de dados que permite traçar uma resposta gráfica da RE em função da temperatura. Com o auxílio do método das tangentes são determinadas as temperaturas de transformação.
Um resultado típico de um teste de RE de uma liga LMF NiTi (AIROLDI et al, 1997), é mostrado na Fig. 2.30. Observa-se que as temperaturas nas fases rombohedral inicial e final são respectivamente, RS=60ºC e RF=40ºC. E a temperatura de austenita final
Figura 2.30 – Resistência elétrica normalizada vs. Temperatura para liga NiTi
2.5 CONSIDERAÇÕES FINAIS
CAPÍTULO III
PROJETO, FABRICAÇÃO E CARACTERIZAÇÃO DE MOLAS
HELICOIDAIS COM MEMÓRIA DE FORMA
3.1 INTRODUÇÃO
Em um projeto estrutural que está sujeito a carregamentos dinâmicos, o valor da freqüência natural, definida como
ω
n = k m, depende da rigidez do elemento sobre o qual o equipamento está suportado, como também da massa principal do equipamento. Sendo assim, se um equipamento está montado sobre elementos de rigidez controlável, é possível reduzir os níveis de vibração deste equipamento, através de ajustes deste parâmetro. Por outro lado, a alteração da massa nem sempre é uma boa opção de projeto, especialmente quando a solução resulta num aumento de peso da estrutura.Conforme mencionado anteriormente, o controle de rigidez pode ser aplicado utilizando alguns dispositivos, sejam eles pneumáticos, eletromagnéticos, ou ainda utilizando atuadores de materiais com memória de forma.
Dentre as diversas aplicações dos materiais com memória de forma, o controle de vibrações em estruturas é um dos mais estudados (LAGOUDAS, 2008). Conforme comentado, este controle de vibrações se baseia principalmente na alteração da rigidez estrutural do sistema vibratório (CHOI e HWANG, 2000; HOLDHUSEN e CUNEFARE, 2000; TAO e FRAMPTON, 2006).
3.2. PROJETO E FABRICAÇÃO DE MOLAS HELICOIDAIS COM MEMÓRIA DE FORMA
A rigidez de uma mola helicoidal depende de parâmetros como geometria e do módulo de elasticidade do material envolvido na fabricação. No caso de molas feitas de LMF, o módulo de elasticidade pode variar com o aumento da temperatura. KHAJEPOUR
et al(1998) mostraram que o modulo de elasticidade da LMF depende das frações de martensita e austenita, e que no caso de molas helicoidais o módulo de elasticidade aumenta em aproximadamente três vezes com o aumento da temperatura (SRINIVASSAN, 2001).
Na área de projetos mecânicos, molas são elementos mecânicos usados para exercer forças, absorver impactos e para armazenar energia elástica. As molas podem ser classificadas tanto quanto à sua forma como também pelo tipo de esforços a que são solicitadas. Desta forma, temos molas helicoidais, molas de disco, molas de lâminas, entre outras. Neste trabalho, os estudos foram desenvolvidos utilizando molas helicoidais submetidas à tração e compressão, situação bastante comum em sistemas vibratórios.
Figura 3.1 – Mola helicoidal de compressão
Independente do tipo de mola ou do material de fabricação, todas elas possuem uma constante elástica comumente representada pela letra k. No caso de molas helicoidais cilíndricas e sob compressão, o valor da rigidez k é definido como a razão entre a força aplicada pelo deslocamento resultante da aplicação desta força:
y F
k = (3.1) Ou ainda:
N D
G d k
. . 8
.
3 4
= (3.2) onde:
G é o módulo de elasticidade transversal do material
N é o número de espiras ativas
As molas podem apresentar rigidez linear ou não-linear, sendo mais comum aplicações para molas lineares. No entanto, para o caso de molas em LMF, certamente as respostas são não-lineares, uma vez que o módulo G varia com a temperatura.
caracterização termomecânica da LMF e em seguida a mola foi montada em um sistema dinâmico vibratório.
A escolha das dimensões da mola foi baseada na faixa de freqüência que o motor excitador atua (0 a 60 Hz) e na massa principal do sistema (≈ 0,5 Kg). Como o sistema deve entrar em ressonância para se verificar os efeitos do atuador de LMF na redução dos níveis de vibração, foi escolhida uma faixa de freqüências naturais de 12 Hz a 20 Hz. Isto resultou em uma mola com um diâmetro efetivo de 12 mm e 9 espiras ativas. O fio da liga Ni-Ti (50%), identificada pelo fabricante como sendo liga M (Memory-Metalle GmbH©), tem 2,59 mm de diâmetro. A mola confeccionada é mostrada na Fig. (3.2).
Figura 3.2 – Mola de LMF Ni-Ti
3.3. FAIXAS DE TEMPERATURAS DE TRANSFORMAÇÃO
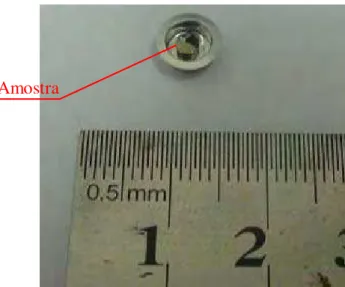
Figura 3.3 – Amostra da Liga de NiTi submetida ao ensaio de DSC.
Essa amostra foi submetida a um ciclo térmico de aquecimento e resfriamento, onde foram medidas as quantidades de calor absorvida e liberada. A diferença entre as quantidades de calor em cada recipiente do equipamento (Fig. 3.4), revela o calor absorvido ou gerado da amostra. Durante este processo de medição são verificados picos exotérmicos (durante o ciclo de arrefecimento) e endotérmicos (para a transformação inversa, durante o aquecimento) que permitiram determinar o início e o final das transformações responsáveis, respectivamente, pela absorção ou pela liberação de calor.
Figura 3.4 – Amostra no DSC.
A Figura 3.5 mostra o gráfico de DSC em função da temperatura. Por este gráfico verifica-se que as temperaturas de transformação direta são MS =22°C (temperatura de
início da transformação martensítica), MP =12°C (temperatura de pico da transformação
Amostra
martensítica) e MF=2°C (temperatura de fim da transformação martensítica) e as
temperaturas de transformação reversa são AS=48°C (temperatura de início da
transformação reversa), AP=57°C (temperatura de pico da transformação reversa) e
AF=63°C (temperatura de fim da transformação reversa). As temperaturas de início e fim
da transformação foram interpoladas, podendo apresentar pequenas variações para fora do intervalo tomado. Atualmente, é usual utilizar-se de temperaturas de pico da transformação que não apresentam erros de interpretação e, por esses pontos, pode-se observar que a histerese da transformação martensítica AP-MP é de 45°C.
Figura 3.5 – Temperaturas de transformação obtidas pelo DSC.
3.4. MODELO PARA CÁLCULO DE RIGIDEZ VARIÁVEL
De acordo com a Eq. (3.2), a rigidez de uma mola helicoidal depende de sua geometria e do material constituído, representado pelo módulo de elasticidade transversal.
Um modelo matemático que descreve o comportamento da mudança de estado martensítico para austenitico (IKUTA et al, 1991) é apresentado na Eq. (3.3). É possível então fazer uma relação entre a rigidez e a temperatura em que se encontra uma mola de LMF: + − − + = 2 2 6 1 1 S F S F A A A T A A . , exp
ξ (3.3)
-20 -10 0 10 20 30 40 50 60 70 80 90 100
Onde :
ξA: é a fração de austenita da liga;
AF: é a temperatura final da fase austenítica;
AS: é a temperatura de início da fase austenítica;
T: Temperatura da LMF.
Como as LMF, durante o resfriamento, apresentam uma histerese de temperatura após um aquecimento até o estado completamente austenítico, de modo análogo, as frações de martensita na fase Rhombohedral podem ser determinadas durante o resfriamento conforme Eq. (3.4):
+ − − + = 2 . 2 , 6 exp 1 1 S F F S R R R T R R
ξ (3.4)
Onde :
ξR: é a fração de martensita da liga na fase Rhombohedral;
RF: é a temperatura final da fase Rhombohedral;
RS: é a temperatura de início da fase Rhombohedral;
T: Temperatura da mola.
No estado em que a fase R está completa (ξR =1 ou ξA=0), a rigidez da mola
apresenta um valor mínimo, que será denotado por kmin. Esta fase ocorre em temperaturas
inferiores a AS, tendo em vista que a estrutura interna do material nesta faixa de
temperatura fornece um módulo de elasticidade mínimo.
Para o estado completamente austenítico (ξR=0 ou ξA=1), a rigidez da mola
apresenta um valor máximo, que será denotado por kmax. Esta fase ocorre em temperaturas
acima de AF, o que resulta em um módulo de elasticidade máximo. Percebe-se então que a
+ − − − + = + − − − 2 2 6 1 S F S F A A T A A A LMF e k k k k k k . , min max min max min ) ( )
( (3.5)
+ − − − + = + − − − 2 . 2 , 6 min max min max min 1 ) ( ) ( S F F S R R T R R R LMF e k k k k k
k (3.6)
Para verificar a validade do modelo, a mola de Ni-Ti foi submetida a um ensaio para determinação da rigidez em função da temperatura. Para isso foi usada uma máquina universal de ensaios da marca Instron®, onde na Fig. (3.6) é mostrada a mola montada no equipamento para o ensaio de compressão.
Figura 3.6 – Mola de LMF montada para ensaio de compressão.
Tabela 3.1 – Rigidez da mola LMF para o aquecimento e resfriamento
Temperatura (ºC) Rigidez (N/m)
Aquecimento Resfriamento
2 4766,8 4688,3
5 4580,9 4626,9
8 4661,4 4689,5
11 4611,6 4525,0
14 4446,7 4520,9
17 4520,3 4828,8
20 4311,3 4758,4
23 4414,8 4582,0
26 4295,9 4359,6
29 4400,4 4305,4
32 4370,1 4149,6
35 4164,1 4164,2
38 4208,0 4310,7
41 4149,8 4626,9
44 4222,4 5081,8
47 4092,1 5574,9
50 4120,8 5795,7
53 4828,2 5985,9
56 5659,5 6003,3
59 5916,7 5968,4
62 5847,9 6020,9
65 6004,2 6004,2
68 6102,0 6102,0
71 6103,5 6103,5
De posse dos dados da Tabela (3.1) do teste de rigidez, e dos valores das temperaturas de transformação de fase encontradas no teste de DSC da Fig. (3.5), e aplicando nas Equações (3.5) e (3.6), é obtido o resultado gráfico mostrado na Fig. (3.7). Os valores de rigidez máxima e mínima, observadas na Fig. 3.7, foram respectivamente iguais a
kmax=6103 N/m (71ºC) e kmin=4092 N/m (47ºC) durante a fase de aquecimento. Já durante o
resfriamento os valores de rigidez máxima e mínima, foram respectivamente iguais a
kmax=6103 N/m (71ºC) e kmin=4149 N/m (32ºC). Observa-se ainda que durante o
foi verificado no ponto médio entre a rigidez máxima e mínima (kmed= 5100 N/m),
obtendo-se dois valores de temperatura, 58°C para o aquecimento e 44°C para o resfriamento, resultando em um ∆T=14°C.
Figura 3.7 – Rigidez da mola de LMF em função da temperatura.
Vale salientar que os resultados experimentais obtidos e mostrados nas Figuras 3.5 e 3.7 são válidos para a amostra de NiTi utilizada na confecção da mola. A utilização de outra amostra NiTi com porcentagens diferentes dos componentes da liga, pode resultar em valores diferentes dos mostrados, como temperaturas de transformação e módulo de elasticidade. O modelo teórico proposto por (IKUTA et al, 1991) enfatiza apenas a alteração das frações de martensita e austenita entre as temperaturas de austenita inicial e final, e entre as temperaturas de martensita inicial e final. Neste mesmo modelo, não é feito nenhum comentário do comportamento das frações de martensita ou austenita entre as temperaturas de martensita final e austenita inicial, ou entre austenita final e martensita inicial, onde em ambas as faixas de temperaturas as frações permanecem constantes.
0 10 20 30 40 50 60 70 80 4000
4500 5000 5500 6000
R
ig
id
e
z
[
N
/m
]
Temperatura [ºC] aquecimento exp.