Drielson D. S. Gouvêa
Introdução à Álgebra Linear e Geometria
Analítica
Sumário
1 Matrizes e Determinantes 5
1.1 Introdução . . . 5
1.2 Matrizes . . . 6
1.3 Operações com Matrizes . . . 7
1.3.1 Adição . . . 7
1.3.2 Multiplicação por Escalar . . . 7
1.3.3 Multiplicação de Matrizes . . . 8
1.3.4 Traço de uma Matriz . . . 10
1.4 Tipos de Matrizes . . . 10
1.5 Polinômio Matricial . . . 11
1.6 Inversa . . . 12
1.7 Exercícios . . . 13
1.8 Determinantes . . . 17
1.8.1 Menor e Cofator . . . 18
1.8.2 Inversa . . . 19
1.9 Autovalores e Autovetores . . . 19
1.9.1 Determinantes e Autovalores . . . 21
1.10 Exercícios . . . 21
2 Sistemas Lineares 24 2.1 Introdução . . . 24
2.2 Primeiras denições. . . 24
2.3 Sistemas e Matrizes. . . 25
2.4 Classicando um Sistema Linear . . . 25
2.5.1 O Problema geral . . . 26
2.5.2 O Algoritmo . . . 27
2.6 Sistema Linear Homogêneo . . . 27
Capítulo 1
Matrizes e Determinantes
1.1 Introdução
1.2 Matrizes
Denição 1.1 (Matrizes em (R)). A representação Am×n é chamada de matriz A. É
uma tabela com m linhas e n colunas, escrita da seguinte maneira:
A= (aij)m×n=
a11 a12 ... a1n
a21 a22 ... a2n ... ... ...
am1 am2 ... amn
(1.1)
onde (ij)i−simo elemento de A é
(A)ij =aij. (1.2)
Observação 1.1. Um dos aspectos mais difíceis de ensino superior na álgebra é a notação. Como pode ser visto a partir da denição, existem duas formas equivalentes de representar uma matriz, com uma letra maiúsculaA e outra com a notação(aij)m×n.
Denição 1.2. Duas matrizes A e B são ditas iguais(A=B), se e somente se, tiverem
o mesmo número de linhas e colunas, além dos elementos correspondentes iguais.
aij =bij. (1.3)
para todoi= 1, ..., m e j = 1, ..., n.
Denição 1.3. Para uma matrizAm×n, se m=n, i.e. se o número de linhas for igual
ao de colunas, a matriz é dita matriz quadrada.
Exemplo 1.1. Construa a matriz A= (aij)3×3 tal que aij = 2i2+ 3j.
Exemplo 1.2. Seja A∈M3(R). Determine a matriz A, de maneira explícita, tal que:
(A)ij =
(−1)j+1
2i, se:i= 1,2,3, j = 1
i(−1)i+j
i+j−1, se:i= 1,2,3, j = 2,3
1.3 Operações com Matrizes
1.3.1 Adição
Denição 1.4. Se A= (aij)n×m e B = (bij)n×m, então:
(A+B)ij =aij +bij, (1.4)
ou
a11 a12 ... a1n
a21 a22 ... a2n ... ... ...
am1 am2 ... amn
+
b11 b12 ... b1n
b21 b22 ... b2n ... ... ...
bm1 bm2 ... bmn
=
a11+b11 a12+b12 ... a1n+b1n
a21+b21 a22+b22 ... a2n+b2n
... ... ...
am1+bm1 am2+bm2 ... amn+bmn
Teorema 1.1. Se A, B, C são matrizes de ordem m×n, então A+B =B+A e (A+B) +C =A+ (B+C)
1.3.2 Multiplicação por Escalar
Denição 1.5. Se λ é um escalar e A= (aij) é uma matriz de ordem m×n, então
λA=λ(aij)m×n = (λaij)m×n =
λa11 λa12 ... λa1n
λa21 λa22 ... λa2n
... ... ...
λam1 λam2 ... λamn
(1.5)
Teorema 1.2. Se α, β são escalares e A, B são matrizes de ordem m×n, então
α(A+B) =αA+αB
Exemplo 1.3. Sejam:
A=
2 1 0
1 2 1
;B =
0 −1 −2
6 2 4
e C =
3 0 3
6 −3 −3
matrizes M3×3(R).Calcular:
• (A+B)−(B+C); • 3A−2B+C; • 3
(
A−1 2B
)
+ 1 3C.
1.3.3 Multiplicação de Matrizes
Denição 1.6. Sejam A= (aij)m×n e B = (bij)n×p duas matrizes, então o produto AB é uma matriz de ordem m×p, tal que
(AB)ij =ai1b1j+ai2b2j+a31b3j +...+ainbnj = n
∑
k=1
aikbkj (1.6)
Observação 1.2. Em geral, AB ̸=BA.
Teorema 1.3. Para o produto de matrizes, valem as seguintes propriedades: 1. A(BC) = (AB)C;
2. A(B +C) = AB+AC e (B+C)A=BA+CA;
3. Se λ é um escalar e AB é denido, então λ(AB) = (λA)B =A(λB);
4. É possível para AB = 0 com A̸= 0 e B ̸= 0.
Observação 1.3. O produto matricial AB consiste de todas as combinações dos pro-dutos das linhas de A e as colunas de B. Em outras palavras, só podemos multiplicar duas matrizes, se o número de colunas da primeira for igual ao número de linhas da segunda.
Figura 1.1: Dispositivo prático para o produto de matrizes.
A gura abaixo mostra um dispositivo simples para ajudar no produto entre as matrizes A e B.
Denição 1.7. A matriz In∈Mn(R), dada por
In=
1 0 ... 0
0 1 ... 0
... ... ...
0 0 ... 1
(1.7)
ou abreviadamente (In)ij = δij, 1 ≤ i, j ≤ n, onde δij é o símbolo de Kronecker, se denomina matriz identidade de ordem n.
Observação 1.4. O símbolo delta de Kronecker vem a ser denido por
δij =
1, se:i=j
0, se:i̸=j (1.8)
1.3.4 Traço de uma Matriz
Denição 1.8. O traço de uma matriz quadrada A é a soma dos elementos da sua diagonal principal.
T r(A) =
n
∑
k=1
akk =a11+a22+a33+...+ann. (1.9)
1.4 Tipos de Matrizes
Denição 1.9 (Transposta). Se A é uma matriz de ordem m×n, a transposta de A,
representada porAT ou A′ é a matriz
n×m tal que
(AT)
ji = (A)ij (1.10)
Observação 1.5. A matriz A é simétrica seA=AT, e anti-simétrica seA=−AT. Observação 1.6. Se A é uma matriz quadrada, então A+AT é simétrica, e A−AT é anti-simétrica.
Exemplo 1.4. Seja
M =
4 −3
1 9
Calcule AT, A+AT e A−AT.
Denição 1.10 (Potência em matrizes). Seja A uma matriz de ordem n. A matrizAk, com k ∈N, representa a k-ésima potência de A e se dene da seguinte maneira:
• A0
=In;
• Ak=A·A·A· · ·A, (k vezes A).
Denição 1.11 (Matriz periódica). Seja A uma matriz de ordem n. A matriz A é uma matriz periódica se, e somente se, ∃p∈Z+, tal que
Ap+1
=A.
Observação 1.7. Se A é uma matriz periódica, o menor inteiro positivopque satisfaça
a igualdad Ap+1
=A é chamado de período de A.
Denição 1.12 (Matriz idempotente). Seja A uma matriz de ordem n. A matriz A é uma matriz idempotente se, e somente se, A2
=A.
Denição 1.13 (Matriz nilpotente). Seja A uma matriz de ordem n. A matriz A é uma matriz nilpotente se, e somente se, ∃p∈Z+,
Ap = 0n.
Observação 1.8. Se A é nilpotente, o menor inteiro positivopque satisfaça a igualdade Ap =O
n se chama índice de nilpotencia.
Denição 1.14 (Matriz normal). Seja A uma matriz real de ordem n. Dizemos que A é uma matriz normal se ATA=AAT, isto é, as matrizes A e AT são comutativas. Exemplo 1.5. Verique se as matrizes reais são normais.
• A =
2 1 4
1 3 0
4 0 1
• B =
3 −1 5
1 3 2
−5 −2 1
1.5 Polinômio Matricial
Denição 1.15. Associa-se o polinômioφ(x) =a0 +a1x+a2x 2
+...+anxn (1.11)
a uma matriz A de ordem n, substituindo a variável x pela matriz A dada, ou seja:
φ(A) =a0In+a1A+a2A 2
+...+anAn. (1.12)
onde a0, a1, ..., an são coecientes reais.
Exemplo 1.6. Dados, o polinômio φ(x) = 3−2x+x2 e a matriz A de ordem
2×2
dada por
A=
1 2
3 1
1.6 Inversa
Denição 1.16. A inversa de uma matriz quadrada A é uma matriz A−1 tal que
A·A−1
=A−1
·A=I (1.13)
Se A possuir uma inversa, então será chamada de inversivel ou não-singular.
Daremos agora um algoritmo, denominado Eliminação Gaussiana, para deter-minar a inversa de uma matrizA, caso A seja inversível.
Denição 1.17 (Operações elementares). Uma operação elementar sobre as linhas de uma matriz é uma das seguintes operações:
• Trocar a posição de duas linhas da matriz;
• Multiplicar uma linha da matriz por um escalar diferente de zero; • Somar a uma linha da matriz um multiplo escalar de outra linha.
Observação 1.9. Se uma matriz B puder ser obtida de A através de um número nito dessas operações, diz-se que B é equivalente a A e escreve-seB ≈A. Para esta relação
valem as propriedades reexiva, simétrica e transitiva.
Teorema 1.4. Uma matriz A é inversível se, e somente se, In ≈ A. Neste caso, a mesma sucessão de operações elementares que transformam A em In, transformam In em A−1.
(A|In)≈. . .≈(In|A) (1.14)
Exemplo 1.7. Determinar a matriz inversa, se existir, da matriz
M =
1 1 −2
0 2 0
1 1 2
Denição 1.18. A matriz quadrada A é chamada de ortogonal se A−1
=AT.
Exemplo 1.8. Verique se a matriz de rotação Rθ é ortogonal.
Rθ =
cosθ senθ −senθ cosθ .
1.7 Exercícios
Exercício 1.1. Considere as matrizes
A=
2 3 −1
−3 4 5
;B =
0 −2 1
−5 0 3
e C =
3 2 4 −1 .
Das operações abaixo, realize a única que é possivel efetuar e, além disso, justique porquê a outra não está denida.
• −2C+ATB
• BTA+ 3C
Exercício 1.2. Considere as seguintes matrizes:
A=
1 −1 0
3 2 1
−2 0 −1
;B =
17 11 24
−15 0 5
2 5 −9
e C =
5 −11 −2
5 4 −1
−3 −4 −4
.
• Calcule 2A−C
• Sabe-se que (2A−C)−1
=
12 10 −27
5 4 −11
−4 −3 9
, determine uma matriz
X ∈M(R)
Exercício 1.3. Seja A=
2 1
7 4
.
• Mostre que I2−6A+A2 =O2
• Encontre a matriz X tal que AX =
1 1
−1 0
.
Exercício 1.4 (U.F.Viçosa). Vários tipos de pesticidas são absorvidos de maneira dife-rente por plantas diversas. Uma matriz pode ser usada para apresentar os dados obtidos em observações sobre a quantidade de três pesticidas diferentes absorvidos por quatro plantas determinadas:
• Seja aij a quantidade do pesticida i absorvido pela planta j (em mg) em um mês chuvoso; então A= (aij)3×4 é a tabela
P lanta1 P lanta2 P lanta3 P lanta4
2 3 4 3 P esticida1
2 3 4 3 P esticida2
2 3 4 3 P esticida3
• Suponhamos que a matriz B = (bij)4×3, representada pela tabela abaixo, dá a
quantidade da planta i que o herbívoro j consome por mês:
Animal1 Animal2 Animal3
20 12 8 P lanta1
28 15 15 P lanta2
30 12 10 P lanta3
40 16 20 P lanta4
Então a matriz produto AB dá a quantidade de pesticida i que o herbívoro j absorveu
em um mês chuvoso devido ao seu consumo das plantas (assumindo que todo o pesticida contido nas plantas é absorvido pelo animal).Assim sendo:
• Calcule A·B
• Qual a quantidade de pesticida 2 que o herbívoro 3 absorveu em miligramas?
Exercício 1.5 (U.F.Viçosa). Um fabricante faz dois tipos de produtos, P e Q, em cada uma de suas fábricas, X e Y. Ao fazer esses produtos, são produzidos dióxido de enxofre, óxido nítrico e partículas de outros materiais poluentes. As quantidades de poluente são dadas (em quilos) pela tabela: Leis estaduais e federais exigem a remoção
Dióxido de enxofre Óxido nítrico Partículas
300 100 150 Produto P
200 250 400 Produto Q
desses poluentes. O custo diário para remover cada quilo de poluentes é dado (em dólares) pela tabela matricial:
Fábrica X Fábrica Y
8 12 Dióxido de enxofre
7 9 Óxido nítrico
15 10 Partículas
Qual é o signicado dos elementos do produto matricial AB? Exercício 1.6. Determine números reais x e y tais que:
x3 y2
y2 x2 + −x 3y 4y 2x = 0 4 5 −1 .
Exercício 1.7. Seja A=
1 2 3
2 −2 1
3 2 1
. Calcule A3 e mostre que A3
= 18A+ 28I3.
Exercício 1.8. Calcule, se existir, a inversa de cada matriz abaixo:
• A =
2 −2 1
1 1 −2
−1 0 1
. • B =
1 0 2
2 −1 3
4 1 8
Exercício 1.9 (U.F.Viçosa). A secretaria de meio ambiente de uma cidade constatou que as empresas que trabalham nos ramos de suinocultura, cunicultura e piscicultura são as grandes poluidoras de três regiões do município. Diariamente despejam dejetos destas culturas segundo a descrição da tabela abaixo:
Quantidade de Dejetos
por dia (em Kg) Região I Região II Região III
Cunicultura 80 90 70
Piscicultura 200 40 30
Suinocultura 150 120 100
A secretaria decidiu então aplicar multas diárias sobre estas empresas a m de angariar fundos para despoluir tais regiões, as multas foram estabelecidas de acordo com a tabela abaixo:
Multa cobrada (em reais) por Kg
de objetos depositados Região I Região II Região III
Cunicultura 400 200 300
Piscicultura 50 400 100
Suinocultura 600 300 500
Considerando A a matriz obtida através da tabela 1 e B a matriz obtida através da tabela 2, determine os elementos da matrizABT que fornece a arrecadação da secretaria nas regiões, por ramo de atividade, ao aplicar tais multas.
Exercício 1.10. Prove queA =
1 −3 −4
−1 3 4
1 −3 −4
é nilpotente e determine seu índice
de nilpotência.
Exercício 1.11. Verique se as matrizes M e N são idempotentes, com:
• M =
2 −2 −4
−1 3 4
1 −2 −3
. • N =
−1 3 5
1 −3 −5
−1 3 5
.
1.8 Determinantes
Denição 1.19. Seja A∈Mn(R). Chama-se determinante, ao número µ∈R associ-ado a matriz A. Notação: det(A) ou |A|.
det(A) =|A|=
a11 a12 ... a1n
a21 a22 ... a2n ... ... ...
an1 an2 ... ann
=µ. (1.15)
Denição 1.20. O determinante da matriz A= (aij)2×2 é dado por
|A|=
a11 a12
a21 a22
=a11·a22−a12·a21. (1.16)
Denição 1.21. O determinante da matriz A = (aij)3×3 pode ser calculado por um
dispositivo chamado Regra de Sarrus.
|A|=
a11 a12 a13
a21 a22 a23
a31 a32 a33
=
↘a11 ↘a12 ↘a13↙ a11↙ a12↙
a21 ↘a22↙ ↘a23↙ ↘a21 ↙ a22
a31 ↙ a32 ↙ ↘a33↙ ↘a31 ↘a32
(1.17)
= (a11a22a33+a12a23a31+a21a32a13)−(a13a22a31+a11a32a23+a12a21a33).
Observação 1.10. Uma matriz A com det(A) = 0 é dita singular e com det(A) ̸= 0
é não singular.
Exemplo 1.9. Encontre todos os valores de λ para os quais det(A) = 0.
• A =
λ−2 1
−5 λ+ 4
• A =
λ−4 0 0
0 λ 2
0 3 λ−1
1.8.1 Menor e Cofator
Denição 1.22 (Menor de um elemento). Se A ∈ Mn(R),dene-se o menor do ele-mento aij de A, denotado por MijA, como o determinante da matriz que se obtém a partir de A, quando se elimina sua i-ésima linha e sua j-ésima coluna.
Denição 1.23 (Cofator de um elemento). Se A ∈ Mn(R),dene-se o cofator do ele-mento aij de A, denotado por ∆ij, como o número dado por
∆ij = (−1)i+j·MijA (1.18)
Observação 1.11. Note-se que ∆ij =
MA
ij, se:i+j 7−→par
−MA
ij, se :i+j 7−→impar
Exemplo 1.10. Seja a matriz
A=
1 2 −1
3 4 0
0 1 −4
Encontre os menores MA
13, M
A
22 e M
A
32, assim como seus respectivos cofatores.
Teorema 1.5 (Teorema de Laplace). O determinante da matrizA = (aij)n×nde ordem
n≥2, pode ser obtido, pela soma dos produtos dos elementos de uma la qualquer (linha
ou coluna), da matriz A, pelos seus respectivos cofatores.
det(A) =ai1·∆i1+ai2·∆i2+...ain·∆in = n
∑
k=1
aik·∆ik. (1.19) Exemplo 1.11. Calcular o determinante da matriz
A =
1 2 −1
3 4 0
0 0 −4
,
com o auxílio do teorema de Laplace.
Teorema 1.6 (Teorema de Binet). Sendo A = (aij)n×n e B = (bij)n×n duas matrizes de mesma ordem, então:
det(AB) = det(A)·det(B) (1.20)
Teorema 1.7 (Teorema de Jacobi). Se a uma la (linha ou coluna) de uma matriz quadradaA= (aij)n×n for adicionada uma múltipla de outra la paralela, obtemos uma matriz B = (bij)n×n tal que det(A) = det(B).
Teorema 1.8 (Teorema de Cauchy). Em toda matriz quadrada de ordemn ≥2, soma
dos produtos dos elementos de uma la (linha ou coluna) pelos cofatores dos correspon-dentes de uma la paralela é igual a zero.
1.8.2 Inversa
Teorema 1.9. Se A = (aij)n×n e det(A) ̸= 0, então a matriz inversa de A é obtida por:
(A−1
)ij =
1
det(A)(−1)
i+j
det(MjiA) (1.21)
Observação 1.12. A matrizA = (aij)n×nadmite inversa, se e somente se,det(A)̸= 0. Observação 1.13. O determinante da matriz inversa é igual ao inverso do determi-nante da matriz dada, ou seja:
det(A−1
) = 1
det(A) (1.22)
1.9 Autovalores e Autovetores
Denição 1.24 (Autovalor). Um autovalor de uma matriz A = (aij)n×n é um escalar
λ tal que
x:Ax=λx (1.23)
Alternadamente, um autovalor é um escalar λ , tal que a equação (A−λIn)x = 0 tem uma soluçãox ̸= 0. A m de que esta equação para tenha uma solução diferente
de zero, a matrizA−λIn , não deve ser invertida, assim det(A−λIn) = 0. Calculando este determinante, a matrizA−λIn produz um polinômio que em geral admite raízes complexas.
Denição 1.25 (Polinômio Característico). O polinômio característico de uma matriz
A= (aij)n×n é o polinômio em λ obtido através do cálculo do determinante
det(A−λIn) = 0 (1.24)
Denição 1.26 (Autovetor). Um autovetor x associado à um autovalor λ é uma
so-lução não nula da equação
(A−λIn)x= 0 (1.25)
Teorema 1.10 (Teorema de Cayley-Hamilton). Toda matriz A = (aij)n×n é raiz de seu polinômio caracterítico, ou seja,P(A) = On×n.
Exemplo 1.12. Dada uma matriz quadrada A de ordem n, uma matrizv ̸= 0de ordem n×1 é autovetor de A associado ao autovalor λ∈R se Av=λv. Seja a matriz
A=
2 1
0 2
Determine:
• O Polinômio característico P(λ). • Seus autovalores e autovetores.
• Mostre que para A, vale o teorema de Cayley-Hamilton.
1.9.1 Determinantes e Autovalores
Denição 1.27. Se A = (aij)n×n é uma matriz, e λ1, λ2, λ3, ..., λn são os autovalores de A, então
det(A) =λ1·λ2 ·λ3...λn. (1.26)
Exemplo 1.13. Dada a matriz
A=
1 2 3
3 −5 3
6 −6 4
Determine:
• O Polinômio característico P(λ). • Seus autovalores.
• Seu determinante.
1.10 Exercícios
Exercício 1.12. Resolva cada equação abaixo:
•
x+ 1 x x
x x+ 1 x
x x x+ 1
= 0 •
−x −1 2x
2x −x −1−x
−1 2x 0
= 0
Exercício 1.13. Calcular os valores deαtal que o determinante da matriz
1 1 α
1 α 1
α 1 1
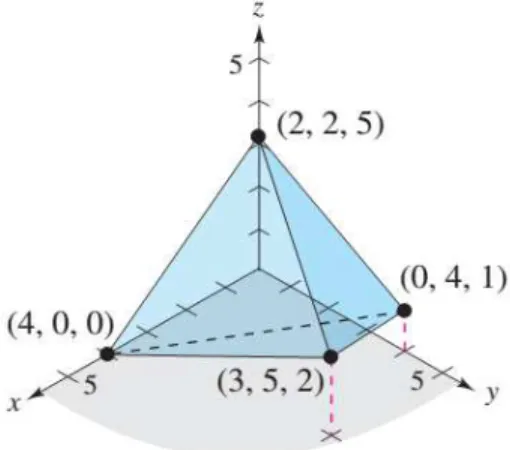
Exercício 1.14. O volume de um tetraedro de vértices(x1, y1, z1); (x2, y2, z2); (x3, y3, z3)
e (x4, y4, z4) é dado por:
V olume=±1 6.det
x1 y1 z1 1
x2 y2 z2 1
x3 y3 z3 1
x4 y4 z4 1
O simbolo ± garante um volume positivo.
Com base na denição acima, utilize o teorema de Laplace e encontre o volume do tetraedro cujos vértices são (0,4,1), (4,0,0),(3,5,2) e (2,2,5) como mostra a gura:
Figura 1.2: Tetraedro.
Exercício 1.15.
Determine os autovalores, autovetores e aplique o teorema de Cayley-Hamilton em cada matriz:
• A =
2 1
0 2
• B =
−7 6
6 2
• C =
2 3
3 2
• D=
9 0 0
3 7 −1
3 −2 8
.
Exercício 1.16. Considere a matriz, A=
0 1 0
0 0 1
0 0 0
• Calcule A3
• Utilize álgebra matricial para calcular F(A), com F(X) = (1−X).(1 +X+X2
)
• Calcule |A|, |I−A| e |I+A+A2
|
Exercício 1.17. Utilize as regras de Jacobi e Cauchy em cada matriz abaixo:
• A =
1 5 1
3 0 2
−1 −1 6
• B =
4 0 1
1 3 2
−2 1 1
• C =
4 1 −1
0 1 2
−1 1 5
• D=
2 5 1
2 0 1
0 5 0
Exercício 1.18. Os cientistas Crow e Kimura estudaram um problema genético de cruzamento que leva à equação característica
−λ 1 0
0 1
2 −λ 1 2 1 4 1 2 −λ = 0
Mostre que a equação característica éλ3−1 2λ
2
−1 4λ−
1
8 = 0, e que um valor característico
Capítulo 2
Sistemas Lineares
2.1 Introdução
O estudo de Sistemas de Equações Lineares aparecem com grande frequência na resolução numérica de equações em derivadas parciais, e problemas provenientes da Física, Ecologia, etc. Neste capítulo abordaremos questões relacionadas com a resolução destes tipo de sistemas.
2.2 Primeiras denições.
Denição 2.1. Um sistema de equações lineares de m equações com n incógnitas é uma expressão do tipo:
a11x1+a12x2+...+a1nxn=b1
a21x1+a22x2+...+a2nxn=b2
+...+
am1x1+am2x2+...+amnxn=bm
(2.1)
onde os aij são denominados coecientes, xi são as incógnitas e bi os termos indepen-dentes.
Denição 2.2. A solução de um sistema linear é toda n-upla (x1, ..., xn)∈Rn que sa-tisfaz, simultaneamente, todas as equações do sistema, sendo n o número de incógnitas do sistema.
2.3 Sistemas e Matrizes.
As matrizes são muito adequadas para simplicar a escritura de um sistema linear. Assim, podemos escrever:
a11 a12 ... a1n
a21 a22 ... a2n ... ... ...
am1 am2 ... amn
• x1 x2 ... xn = b1 b2 ... bm (2.2)
ou na forma simplicada
A·X =B (2.3)
2.4 Classicando um Sistema Linear
Os sistemas lineares podem ser classicados quanto a possibilidade de obtenção de soluções, dentro do conjunto numérico ao qual os sistemas devem ser resolvidos. Inicialmente, encontramos dois tipos de sistemas: Os Possíveis e os Impossíveis.
• Sistema Possível e Determinado (SPD): são sistemas que possuem apenas
uma solução.
• Sistema Possível e Indeterminado (SPI): são sistemas que permitem innitas
soluções.
Esquematicamente...
2.5 Método de Gauss
Denição 2.3 (Método de Gauss). É um algoritmo de resolução para Sistemas Linea-res. Este método consiste em aplicar sucessivas operações elementares em um sistema linear, am de transformá-lo num sistema de fácil resolução, tendo este as mesmas soluções que o original.
2.5.1 O Problema geral
Deseja-se, a partir da utilização de operações de linha, converter uma matriz a sua forma escalonada reduzida, e assim, resolver mais facilmente o sistema de equações associado àquela matriz. Para este m, utilizamos o Método de Gauss, sendo este composto por duas fases:
• Fase de eliminação: cujo objetivo é empregar operações elementares na matriz
aumentada, am de obter uma correspondente a um sistema triangular superior.
• Fase de substituição retrocedida: começa-se resolvendo a última equação,
cuja solução é substituída na penúltima, a qual resolve-se na penúltima variável, e assim consecutivamente, até obter-se a solução nal.
2.5.2 O Algoritmo
SejaAx=bum sistema linear. O Método de Gauss, para se encontrar a solução do
sistema, consiste nas seguintes etapas:
• Etapa 1: Obter a matriz aumentada na forma [A|b]que representa o sistema de
equações.
• Etapa 2: Transformar a matriz aumentada [A|b] em uma matriz aumentada na
forma [A|b] onde A é uma matriz triangular superior.
• Etapa 3: Resolver o sistema linear [A|b]da Etapa 2 por substituição regressiva.
Exemplo 2.1. Resolver mediante o Método de Gauss o seguinte sistema:
x+ 2y+ 3z = 7
x−3y+ 2z= 5
x+y+z = 3
2.6 Sistema Linear Homogêneo
Denição 2.4. Um sistema linear é dito homogêneo, se os termos independentes forem nulos, ou seja, bi = 0, para todo i= 1, ..., m.
a11x1+a12x2+...+a1nxn= 0
a21x1+a22x2+...+a2nxn= 0
+...+
am1x1+am2x2+...+amnxn= 0
(2.4)
Observação 2.1. O sistema homogêneo nunca é impossível, pois sempre admite a solução (0; 0;...; 0), chamada solução trivial ou solução imprópria ou, ainda, solução
nula.
Exemplo 2.2. Resolver mediante o Método de Gauss o seguinte sistema:
2x−y+z = 0
x+ 3y+ 2z = 0
−3x+ 2y−3z = 0
2.7 Exercícios
Exercício 2.1. Resolva por eliminação de Gauss os seguintes sistemas de equações lineares: •
x+ 2y+ 3z = 1
4x+ 7y+ 7z = 3
x+ 3y+z = 0
•
x+ 2y+z = 0
4x+ 10y+ 10z = 0
x+ 3y+ 4z = 0
•
2x+ 2y+ 3z= 1
x+ 2y+z = 0
x−y+z= 0
•
2x+ 3y+z = 0
x+y+z = 0
Exercício 2.2. Discuta, em função dos parâmetros α e β, os seguintes sistemas de
equações lineares: •
x+ 4y+ 3z = 10
2x+ 7y−2z = 10
x+ 5y+αz =β
•
2x+y+z=?6β
αx+ 3y+ 2z = 2β
2x+y+ (α+ 1)z = 4
Exercício 2.3. Para preparar uma ração se utilizam três cereais: A, B e C. A ração I tem 20 Kg de cereal A, 50 Kg de cereal B e 100 Kg de cereal C. A ração II tem 35 Kg de cereal A, 60 Kg de cereal B e 80 Kg de cereal C. A ração III tem 45 Kg de cereal A, 45 Kg de cereal B e 50 Kg de cereal C. Se tem 36000 Kg de cereal A, 40000 Kg de cereal B e 48000 Kg de cereal C. Quantas unidades de cada ração se podem preparar se for utilizado todo o cereal disponível?
Exercício 2.4. Uma indústria produz três produtos, X, Y e Z, utilizando dois tipos de insumo, A e B. Para a manufatura de cada kg de X são utilizados 1 grama do insumo A e 2 gramas do insumo B; para cada kg de Y, 1 grama de insumo A e 1 grama de insumo B e, para cada kg de Z, 1 grama de A e 4 gramas de B. Usando a multiplicação de matrizes determine quantos gramas dos insumos A e B são necessários na produção de x kg do produto X, y kg do produto Y e z kg do produto Z.
Exercício 2.5. Um produtor agropecuário plantou soja, milho e sorgo em seu campo de 1008 hectares. Ele semeou o dobro de hectares de soja que de milho, e a quantidade de hectares semeados com soja superam em 25% a dos semeadas com os outros dois
cultivos. Quantos hectares se semearam de cada cultivo?
Exercício 2.6. Três produtos químicos X; Y e Z, utilizados nos laboratórios da Uni-versidade Federal Rural da Amazônia, têm as seguintes porcentagens de Fe, Zn e Cu:
Fe Zn Cu X 50 30 20 Y 40 30 30
Z 30 70 0
Quanto de cada produto se deve combinar para obter um novo produto que contenha
44% de Fe, 38% de Zn e 18% de Cu?
Exercício 2.7. SejaSγ o sistema de equações lineares representado matricialmente por
1 0 1
0 3 γ
−1 0 −1
.X =
1
0
1
Exercício 2.8. Para fazer o balanceamento de uma equação química devemos aplicar a lei de Lavoisier (lei da conservação de massa), o número de átomos de um mesmo elemento deve ser igual nos dois membros da equação. Assim, faça o balanceamento das equações químicas abaixo:
• Al2(CO3)3 → Al2O3 + CO2
• CaO5 + P2O → Ca3(P O4)2
• Ca+ H3P O4 → Ca3P2O8+ H2
Exercício 2.9. Os coecientes estequiométricos são números encontrados no processo de balanceamento de equações químicas, que garantem a mesma quantidade de átomos de cada elemento químico em ambos os lados da equação. Esses coecientes devem ser sempre os menores números naturais possíveis e são colocados antes dos símbolos que descrevem cada uma das moléculas em cada um dos lados de uma reação química. Sejam x, y, z e w os coecientes estequiométricos necessários para o balanceamento da equação
C3H8+O2 →CO2+H2O
Explicite todos os seus cálculos, justicando seus argumentos, e determine:
• um sistema com três equações lineares que representa o balanceamento da equação
química dada;
• as soluções do sistema linear obtido no item anterior;
• os valores dos coecientes estequiométricos da reação química dada acima.