Universidade Federal da Paraíba Centro de Tecnologia PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA MECÂNICA
- Mestrado - Doutorado
ANÁLISE DE UM COMPENSADOR ESTÁTICO PARALELO
MONOFÁSICO VISANDO A MELHORIA DO FATOR DE
POTÊNCIA
por
Adson Íkaro Silva Leite de Andrade
Dissertação de Mestrado apresentada à Universidade Federal da
Paraíba para obtenção do grau de Mestre
ADSON ÍKARO SILVA LEITE DE ANDRADE
ANÁLISE DE UM COMPENSADOR ESTÁTICO PARALELO
MONOFÁSICO VISANDO A MELHORIA DO FATOR DE
POTÊNCIA
Dissertação de mestrado apresentada ao curso de Pós-Graduação em engenharia mecânica da Universidade Federal da Paraíba, em cumprimento às exigências para obtenção do Grau de Mestre.
Orientador: Prof. Dr. Isaac Soares de Freitas
A553a Andrade, Adson Íkaro Silva Leite de.
Análise de um compensador estático paralelo monofásico visando a melhoria do fator de potência / Adson Íkaro Silva Leite de Andrade.--João Pessoa, 2011.
94f. : il.
Orientador: Isaac Soares de Freitas
Dissertação (Mestrado) - UFPB/CT
1. Engenharia Mecânica. 2. Filtro ativo paralelo. 3. Sistema de controle. 4. Reativos e harmônicos – Compensação. 5.
Energia elétrica – qualidade.
ANÁLISE DE UM COMPENSADOR ESTÁTICO PARALELO
MONOFÁSICO VISANDO A MELHORIA DO FATOR DE
POTÊNCIA
por
Adson Íkaro Silva Leite de Andrade
Dissertação aprovada em 17 de novembro de 2011
Período letivo 2011.2
___________________________________________________
Prof. Dr. DARLAN ALEXANDRIA FERNANDES - UFPB
Examinador Externo
___________________________________________________
Prof. Dr. SIMPLÍCIO ARNAUD DA SILVA – UFPB
Examinador Interno
___________________________________________________
Prof. Dr. ISAAC SOARES DE FREITAS – UFPB
João Pessoa - Paraíba 2011
DEDICATÓRIA
Dedico este trabalho ao meu pai Erivaldo e principalmente a minha mãe Márcia Jocélia, pelo incentivo e apoio incondicional.
A minha tia Maria Jocilda e ao meu tio José Jocerlan que muitas vezes foram os meus pais, e assim como eles me deram o incentivo e apoio necessário.
Aos meus irmãos Alexandre, Aline, Anderson e Ingrid, que sempre acreditaram e mim. Dedico também ao amor da minha vida, Roselany Bernardino pelo apoio, carinho e
motivação dados.
AGRADECIMENTOS
Ao Deus todo poderoso por ter me dado essa oportunidade de estudar e de seguir os seus caminhos e por ter colocados pessoas maravilhosas na minha caminhada.
Ao meu orientador professor Isaac Soares de Freitas, que mesmo sem me conhecer me aceitou para ser seu aluno, pela atenção, apoio e amizade.
Aos professores do PPGEM, pela atenção e cuidado dispensado a mim e aos demais alunos, durante todo o curso de pós-graduação.
Aos meus companheiros de laboratório Alexander, Altemir, Pedro, Amanda e Átila pela união, dedicação e disposição em sempre ajudar.
A minha namorada Roselany Bernardino da Silva que sempre me deu apoio e atenção fundamentais para execução deste trabalho. Além da sua compreensão e paciência durante todo esse período.
Aos meus pais Erivaldo e Márcia Jocélia, e os meus tios José Jocerlan e Maria Jocilda pelos exemplos de honradez e pela preocupação em disponibilizar a mim e aos meus irmãos a melhor educação possível.
Aos meus queridos irmãos Alexandre, Aline, Anderson e Ingrid e ao meu grande amigo Silvano Bernardino e a sua esposa Josineuma Bernardino e aos seus filhos Joicyane, Suellen Bruna e Silvano Filho pelas mensagens de apoio e presença nos momentos de dificuldade ao longo desta caminhada.
Aos meus amigos Fernando da Silva Dias e família, Raphael W. M. Peixoto, Petrov C. Lobo e a família da minha namorada, Roseane Gomes, Marcilio Bernardino Mayara, Emanuel e Eliziany, pois, todos estiveram perto quando eu precisei.
Aos demais amigos que tiveram uma contribuição direta ou indireta para execução deste trabalho.
Ao Conselho Nacional de Desenvolvimento Científico e Tecnológico (CNPQ) pelo
ANÁLISE DE UM COMPENSADOR ESTÁTICO PARALELO
MONOFÁSICO VISANDO A MELHORIA DO FATOR DE
POTÊNCIA
RESUMO
Este trabalho consiste no desenvolvimento de um sistema de controle do fator de potência através da utilização de um filtro ativo paralelo. Para tal, o sistema de controle do filtro é composto por uma malha externa de tensão e uma malha interna de corrente, baseadas em controladores PI. Para o desenvolvimento do mesmo, observaram-se as aplicações dos filtros ativos paralelos oferecidos pela literatura, onde se percebeu que esse tipo de filtro é bastante utilizado para a correção do fator de potência, para o desenvolvimento da técnica de controle foram feitas as modelagens do sistema e as suas respectivas análises em regime permanente, após, modelado o sistema, os controladores foram implementados via simulação numérica e validados através de uma bancada de teste comandada via DSP onde foi implementado o algoritmo de controle e a técnica PWM para o comando das chaves de potência.
ANALYSIS OF A PARALLEL PHASE STATIC COMPENSATOR
ABSTRACT
This work consists of developing a control system power factor through the use of a parallel active filter. To this end, the control system of the filter is composed of an outer voltage loop and an inner current loop, based on PI controllers. For its development, it was observed that the application of parallel active filters offered by the literature, where it was realized that this type of filter is often used to correct the power factor for the development of control technique were made in modeling system and their analysis in steady state, after, the modeled system, the controllers were implemented and validated by numerical simulation using a test bench where he was led via DSP algorithm implemented PWM technique to control and command keys potency.
SUMÁRIO
CAPÍTULO I ... 1
INTRODUÇÃO ... 1
1.1 – INTRODUÇÃO ... 1
1.2 – PROBLEMAS NA QUALIDADE DE ENERGIA ... 5
1.2.1 – Efeito dos harmônicos na qualidade de energia ... 7
1.3 – INFLUÊNCIA DOS FILTROS ATIVOS PARA MELHORAR A QUALIDADE DE ENERGIA ... 11
1.3.1 – Classificação quanto à topologia ... 11
1.3.2 – Classificação quanto à técnica de controle e método de detecção de componentes harmônicas ... 16
1.4 – HISTÓRICO DO DESNVOLVIMENTO DAS TÉCNICAS DE MELHORIA DA QUALIDADE DE ENERGIA ... 18
1.5 – REVISÃO BIBLIOGRÁFICA ... 20
1.6 – OBJETIVOS ... 21
1.7 – ORGANIZAÇÃO DO TRABALHO ... 21
CAPÍTULO II ... 23
FILTRO ATIVO PARALELO ... 23
2.1 – INTRODUÇÃO ... 23
2.2 – MODELAGEM DO FILTRO PARALELO... 23
2.3 – ANÁLISE DE REGIME PERMANENTE... 25
2.3.2 – Análise de regime permanente com a presença de componentes harmônicas
... 29
2.4 – CONCLUSÕES ... 32
CAPÍTULO III ... 33
SISTEMA DE CONTROLE ... 33
3.1 – INTRODUÇÃO ... 33
3.2 – ESTRATÉGIA DE CONTROLE ... 33
3.2.1 – Controle de corrente do filtro ativo paralelo ... 34
3.2.2 – Controle de tensão do filtro ativo paralelo ... 41
3.3 – CONCLUSÕES ... 45
CAPÍTULO IV ... 46
RESULTADOS DE SIMULAÇÃO ... 46
4.1 – INTRODUÇÃO ... 46
4.2.2 – Malha de controle da simulação. ... 47
4.2.3 – Resultados ... 48
4.3 – CONCLUSÃO ... 51
CAPÍTULO V... 53
RESULTADOS EXPERIMENTAIS ... 53
5.1 – INTRODUÇÃO ... 53
5.2 DESCRIÇÃO DO HARDWARE ... 53
5.2.1 Processador Digital de Sinais (DSP) embarcado ... 55
5.3 – MONTAGEM DO EXPERIMENTO ... 58
5.5 – EXPERIMENTOS QUANTIFICADOS ... 69
5.6 – CONCLUSÃO ... 70
CAPÍTULO VI ... 71
CONCLUSÃO E SUGESTÃO PARA TRABALHOS FUTUROS... 71
6.1 – CONCLUSÕES ... 71
6.2 – SUGESTÃO PARA TRABALHOS FUTUROS ... 72
LISTA DE FIGURAS
Figura 1.1: Tensão e corrente em um sistema elétrico com cargas lineares ... 2
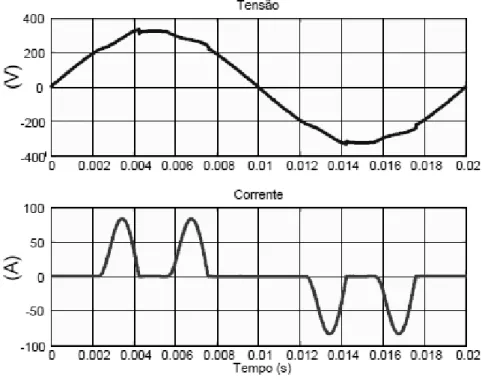
Figura 1.2: Tensão e corrente em um sistema elétrico com cargas não-lineares ... 3
Figura 1.3: Problemas de qualidade de energia elétrica ... 6
Figura 1.4: Esquema básico de um filtro ativo paralelo ... 12
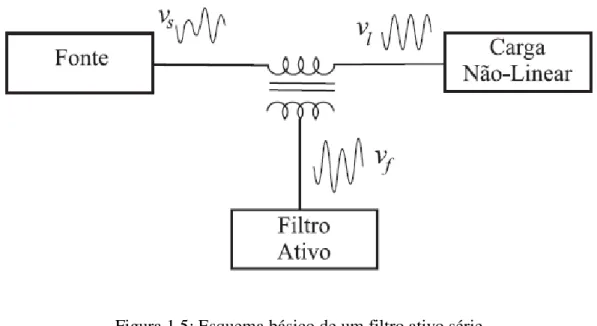
Figura 1.5: Esquema básico de um filtro ativo série ... 13
Figura 1.6: Configurações de filtros híbridos: (a) AS + PP, (b) AS em série com PP, (c) AP + PP ... 14
Figura 2.1: Modelo do filtro ativo paralelo monofásico ... 24
Figura 2.2 – Circuito equivalente a expressão (2.5) ... 25
Figura 3.1 – Diagrama de blocos da malha de controle ... 33
Figura 4.1 – Planta da simulação ... 47
Figura 4.2 – Sistema alimentando uma carga linear ... 49
Figura 4.4 – Formas de onda de tensão e corrente da rede monofásica alimentando uma carga RL com fator de potência de aproximadamente 0,71 ... 49
Figura 4.5 – Formas de onda tensão e corrente da rede monofásica alimentando uma carga RL com o filtro operando, correção do fator de potência para aproximadamente 1 ... 50
Figura 4.6 – Sistema alimentando uma carga não-linear... 50
Figura 4.7 – Tensão e corrente da rede monofásica alimentando uma carga não linear sem filtro ... 51
Figura 4.8 – Tensão e corrente da rede monofásica alimentando uma carga não linear com filtro ... 51
Figura 5.1 – Hardware montado para o acionamento do motor ... 54
Figura 5.3 – Foto do driver SKHI 23/12 (R) da Semikron® ... 55
Figura 5.4 – Kit de desenvolvimento eZdspTM F28335com placa de proteção ... 56
Figura 5.5 – Imagem do Osciloscópio do 1º experimento sem o filtro ... 59
Figura 5.6 – 1º experimento sem o filtro ... 59
Figura 5.7 – Imagem do Osciloscópio do 1º experimento com o filtro ... 60
Figura 5.8 – 1º experimento controlada com o filtro ... 60
Figura 5.9 – Imagem do Osciloscópio da 2º experimento sem o filtro ... 61
Figura 5.10 – 2º experimento sem o filtro ... 62
Figura 5.11 – Imagem do Osciloscópio do 2º experimento com o filtro ... 62
Figura 5.12 – 2º experimento com o filtro ... 63
Figura 5.13 – Imagem do Osciloscópio da 3º experimento sem o filtro ... 64
Figura 5.14 – 3º experimento sem o filtro ... 64
Figura 5.15 – Imagem do Osciloscópio do 3º experimento com o filtro ... 65
Figura 5.16 – 3º experimento com o filtro ... 65
Figura 5.17 – Imagem do Osciloscópio da 4º experimento sem o filtro ... 66
Figura 5.18 – 4º experimento sem o filtro ... 67
Figura 5.19 – Imagem do Osciloscópio do 4º experimento com o filtro ... 67
Figura 5.20 – 4º experimento com o filtro ... 68
Figura 5.21 – Imagem do Osciloscópio do 4º experimento com o filtro ... 68
LISTA DE TABELAS
Tabela 1.3: Comparação entre filtro passivo e ativo --- 14
Tabela 1.4: Técnicas de melhoria na qualidade de energia --- 20
Tabela 4.1 – Parâmetros da simulação --- 47
Tabela 4.2 – Ganhos dos controladores --- 48
Tabela 5.1 – Resultados dos fatores de potência --- 69
Tabela 5.2 – Resultados dos THD da Tensão --- 70
LISTA DE ABREVIATURAS
C.C. corrente continua
DSP processador digital de sinais
tensão de entrada (V)
FD fator de deslocamento, FP fator de potência
THD distorção harmônica total
h ordem das componentes harmônicas, h=1,2,..., h=1 componente fundamental
corrente do filtro (A)
corrente da fonte (A)
corrente com componentes harmônicas (A)
corrente da carga(A)
corrente eficaz (A)
corrente da fonte (A)
indutância do filtro (mH)
indutância de entrada (mH)
potência ativa (W)
potência média fornecida
PWM modulação por largura de pulso
resistência de entrada (Ω)
potência aparente (VA)
período da corrente e tensão (s)
tensão do filtro (V)
tensão do filtro paralelo (V)
tensão com componentes harmônicas (V)
tensão da carga (V)
tensão eficaz (V)
tensão da fonte de alimentação (V)
impedância de entrada
ângulo da fase de
ângulo da fase
CAPÍTULO I
INTRODUÇÃO
1.1 – INTRODUÇÃO
Figura 1.1: Tensão e corrente em um sistema elétrico com cargas lineares Fonte: Revista o Electricista, nº 9, 3º trimestre de 2004, ano 3
Ainda segundo Baliga, B. J. (1996) e Bose, B. K. (1998) na década de 1990 que pode ser definida como a década do desenvolvimento dos sistemas de informação e da eletrônica de potência. Segundo Thomas Wilson (2000) eletrônica de potência é: “A tecnologia associada com uma conversão eficiente, controle e condicionamento de fontes de potência por meios estáticos através de uma forma de entrada disponível e uma forma de saída desejada, e o objetivo é controlar o fluxo provindo de uma fonte elétrica para uma carga elétrica, com alta eficiência, alta disponibilidade, alta confiabilidade, com pouco espaço, peso e baixo custo.” Com ela permitiu-se a execução
de tarefas que não eram possíveis anteriormente. Contudo, esses equipamentos têm a desvantagem de funcionarem como cargas não-lineares tais como: fontes chaveadas, conversores de tensão e corrente, lâmpadas fluorescentes, computadores, televisores, sistemas de acionamento nas indústrias, fornos elétricos, entre outros. Esses equipamentos consomem correntes não-senoidais, e dessa forma “poluem” a rede
Figura 1.2: Tensão e corrente em um sistema elétrico com cargas não-lineares Fonte: Revista o Electricista, nº 9, 3º trimestre de 2004, ano 3
Ou seja, a preocupação passa a ser a presença de distúrbios na tensão como: queda de tensão, sobretensão, faltas, entre outros. Esses distúrbios afetam diretamente a qualidade de produção da indústria, devido ao aquecimento que provoca nos motores, fazendo – se necessário uma maior manutenção, aumenta o risco do isolamento nos condutores devido ao aquecimento e as sobretensões, perdas de capacitores, falhas em equipamentos eletrônicos, interferência eletrônica, ruído, entre outros. Essa preocupação se deve pelo fato do aumento considerável do uso da eletrônica de potência, pois, segundo Lamarre, L. (1991) em documento para o (EPRI) “Electronic Power Research Institute”, em 1994
cerca de 35 – 40% da energia já fluía através de dispositivos eletrônicos e segundo Bose, B. K. (2000) a estimativa no ano de 2000 era de que 60 – 65% de toda a energia produzida nos Estados Unidos eram gastas com acionamento de motores.
A fim de minimizar os problemas existentes, foram criadas algumas normas para reduzir os níveis de distorção harmônica e o controlar o fator de potencia mínimo. Atualmente a regulamentação brasileira do fator de potência (FP) das unidades consumidoras alimentadas a baixa tensão é de 0,92. A Agência Nacional de Energia
Elétrica (Aneel), em seu documento “Procedimentos de distribuição de energia elétrica
“Para unidade consumidora ou conexão entre distribuidoras com tensão inferior a 230 kV, o fator de potência no ponto de conexão deve estar compreendido entre 0,92 (noventa e dois centésimos) e 1,00 (um) indutivo ou 1,00 (um) e 0,92 (noventa e dois centésimos) capacitivo, de acordo com regulamentação vigente. Para unidade consumidora com tensão igual ou superior a 230 kV os padrões deverão seguir o determinado no Procedimento de Rede. Para unidade produtora de energia, o fator de potência deve estar compreendido entre os valores estabelecidos nos Procedimentos de Rede.”
.Conforme foi visto, as componentes harmônicas da corrente também
contribuem para o aumento da corrente eficaz, de modo que contribuem para o aumento da potência aparente sem produzir potência ativa (supondo uma tensão senoidal). Assim, uma correta medição do FP deve levar em conta a distorção da corrente, e não apenas a componente reativa (na freqüência fundamental).
Para o controle da distorção harmônica enviadas para a rede foram criadas as normas IEC 61000-3-2 e IEC 61000-3-4 pelo International Electrotechnical Commission (IEC). A norma IEC 61000-3-2 foi criada em 2001, refere-se às limitações das harmônicas de corrente injetadas na rede pública de alimentação. Aplica-se a equipamentos elétricos e eletrônicos que tenham uma corrente de entrada de até 16 A por fase, conectado a uma rede pública de baixa tensão alternada, de 50 ou 60 Hz, com tensão fase–neutro entre 220 e 240 V. Já a norma IEC 61000-3-4 foi criada 1998 e pode ser aplicado a qualquer equipamento elétrico ou eletrônico, cuja corrente de entrada seja maior que 16 A. Sua tensão de alimentação deve ser menor que 240 V para equipamentos monofásicos ou menor que 600 V para equipamentos trifásicos. A freqüência nominal da rede pode ser 50 Hz ou 60 Hz.
A forma mais adequada de reduzir ou até mesmo eliminar esses problemas no sistema elétrico é o uso de um sistema que compense este comportamento indesejável, um sistema que seja capaz de manter o perfil senoidal da tensão e da corrente o mais fiel possível. Esses sistemas atuam diretamente compensando os harmônicos oriundos do sistema elétrico, a circulação de potência reativa, de forma que a fonte forneça apenas a potência ativa necessária.
passivos e filtros ativos que é o nosso objeto de estudo. Esse último se subdivide em série, paralelo, híbrido e universal. Cada um desses sistemas atende a finalidades distintas cuja aplicabilidade é levada em conta na hora de se optar em que sistema usar.
1.2 – PROBLEMAS NA QUALIDADE DE ENERGIA
Diz-se que há problemas na qualidade de energia quando há um desvio no comportamento senoidal da tensão e corrente, seja ele na amplitude ou na freqüência, vale salientar que um sistema ideal de transmissão de energia só há a componente fundamental de freqüência. Existem vários fatores que contribuem para a deterioração do perfil senoidal tais como:
Distorção harmônica: quando existem cargas não lineares ligadas à rede elétrica a corrente que circula nas linhas contém harmônicos e a queda de tensão provocada pelos harmônicos nas impedâncias das linhas faz com que as tensões de alimentação fiquem também distorcidas.
Ruído (interferência eletromagnética): corresponde ao ruído eletromagnético de alta-frequência, que pode, por exemplo, ser produzido pelas comutações rápidas dos conversores eletrônico de potência.
Inter-harmônicos: surgem quando há componentes de corrente que não estão relacionadas com a componente fundamental (50 Hz); essas componentes de corrente podem ser produzidas por fornos a arco ou por ciclo conversores (equipamentos que, alimentados a 50 Hz, permitem sintetizar tensões e correntes de saída com uma freqüência inferior).
Interrupção momentânea: ocorre, por exemplo, quando o sistema elétrico dispõe de disjuntores com religador, que abrem na ocorrência de um curto-circuito, fechando-se automaticamente após alguns milissegundos (e mantendo-se ligados caso o curto-circuito já se tenha extinguido).
Elevação de tensão (voltage swell): pode ser provocada, entre outros
casos, por situações de defeito ou operações de comutação de equipamentos ligados à rede elétrica.
Flutuação da tensão (flicker): acontece devido a variações intermitentes de
certas cargas, causando flutuações nas tensões de alimentação (que se traduz, por exemplo, em oscilações na intensidade da iluminação elétrica).
Micro-cortes de tensão (notches): consistem em pequenos cortes
periódicos na forma de onda da tensão, que resultam de quedas de tensão nas indutâncias do sistema elétrico, ocorridas devido a cargas que consomem correntes com variações bruscas periódicas (caso dos retificadores com filtro capacitivo ou indutivo).
Transitórios: ocorrem como resultado de fenômenos transitórios, tais como a comutação de bancos de condensadores ou descargas atmosféricas.
A figura 1.3 ilustra os perfis senoidais deteriorados conforme mencionamos anteriormente.
1.2.1 – Efeito dos harmônicos na qualidade de energia
Dos problemas citados na seção anterior, iremos nos deter principalmente, na distorção na forma de onda provocada pelas componentes harmônicas, pois, esse é o problema que mais contribui para a deterioração do perfil senoidal de tensão e corrente, sabe-se também que esse é um problema que já vem sendo detectado desde meados da década de 20 e 30 (Harmonic, W. G., 1983). Nesta época, a principal fonte de harmônicos eram os transformadores, devido à saturação do núcleo magnético. Os efeitos encontrados além da distorção da forma de onda eram:
Aumento das perdas (aquecimento), saturação, ressonâncias, vibrações nos enrolamentos e redução da vida útil de transformadores;
Aquecimento, binários pulsantes, ruído audível e redução da vida útil das máquinas elétricas rotativas;
Disparo indevido dos semicondutores de potência em retificadores controlados e reguladores de tensão;
Problemas na operação de relés de proteção, disjuntores e fusíveis;
Aumento nas perdas dos condutores elétricos;
Aumento considerável na dissipação térmica dos condensadores, levando à deterioração do dielétrico;
Redução da vida útil das lâmpadas e flutuação da intensidade luminosa (flicker – para o caso de ocorrência de subharmônicos);
Erros nos medidores de energia elétrica e instrumentos de medida;
Interferência eletromagnética em equipamentos de comunicação;
Mau funcionamento ou falhas de operação em equipamentos eletrônicos ligados à rede elétrica, tais como computadores, controladores lógicos programáveis (PLCs), sistemas de controle comandados por microcontroladores, etc. (salientando que estes equipamentos controlam freqüentemente processos fabris).
Resumindo as fontes de componentes harmônicas é qualquer dispositivo cuja relação tensão/corrente não seja linear.
onde h=1, é a componente fundamental.
Substituindo as equações (1.2) e (1.3) na equação (1.1), temos:
Onde é a fase de e é a fase de . Os valores rms de (1.2) e (1.3) são dados por:
onde é o período de e , conseqüentemente a potência aparente é dada por:
a taxa de distorção harmônica total (DHT, ou THD em inglês) é definida como sendo:
Este índice reflete o nível de componentes harmônicos em relação à componente fundamental. Para um bom funcionamento dos sistemas elétricos é necessário que este índice tenha valores baixos ou toleráveis às normas que regem a quantidade de harmônicos que podem ser emitidas para a instalação no ponto de acoplamento comum tais como as normas IEC 61000-3-2 e IEC 61000-3-4 que já foram mencionadas anteriormente. Pela substituição da equação (1.5) e (1.6) nas equações (1.8) e (1.9), escrevendo-se e em função de THD temos:
Pode-se relacionar o fator de potência com o THD. Sabendo-se que quando há apenas a componente fundamental em um sistema elétrico, o fator de potência é igual ao fator de deslocamento , mas de forma geral o fator de potência é definido como sendo a relação entre a potência ativa e potência aparente.
e pode-se escrever o fator de deslocamento como sendo:
para o fator de potência, levando-se em consideração a distorção harmônica, que é dado por (Grady, W. M, Gilleskie R. J., 1993) temos:
como as potências produzidas pelas componentes harmônicas são muito pequenas em relação à potência da componente fundamental , pode-se desprezar a potência harmônica da equação anterior, com isso temos:
analisando a equação (1.15) percebe-se que a presença da distorção harmônica diminui o fator de potência, ou seja, a presença de componentes harmônicas induz uma maior circulação de potência reativa, e pode-se observar que quando a THD é zero, o fator de potência é igual ao fator de deslocamento.
longo do tempo e na próxima seção será apresentada uma revisão sobre as técnicas empregadas para a compensação de harmônicos.
1.3 – INFLUÊNCIA DOS FILTROS ATIVOS PARA MELHORAR A
QUALIDADE DE ENERGIA
Neste tópico realizar-se-á uma introdução sobre o uso de filtros ativos para a melhoria da qualidade de energia, pois, eles assumem diversas funções, tais como:
Filtragem de componentes harmônicas;
Compensação de potência reativa;
Compensação de corrente de neutro;
Regulação de tensão;
Os filtros ativos podem ser implementados por meio de conversor tipo fonte de tensão (barramento capacitivo) ou conversor tipo corrente (barramento indutivo) e elementos passivos para a filtragem de harmônicos provindos do chaveamento do conversor.
1.3.1 – Classificação quanto à topologia
Quanto à topologia os filtros ativos se subdividem em:
Filtro ativo paralelo;
Filtro ativo série;
Filtro ativo híbrido;
Filtro universal (série + paralelo);
Figura 1.4: Esquema básico de um filtro ativo paralelo Fonte: Dissertação de Rafael Rocha Matias
A finalidade do filtro é gerar uma corrente de filtro a partir da corrente da carga de forma que quando se subtrair as correntes de resulte numa corrente com apenas a componente fundamental. Além da compensação harmônica, o filtro também contribui para compensação da potência reativa, ou seja, ele torna a corrente em fase com a tensão de alimentação, elevando o fator de potência próximo do unitário. Atualmente o filtro ativo paralelo é implementado utilizando-se um inversor, um capacitor cc para armazenamento de energia e fornecimento de uma tensão cc e elementos passivos, necessários para a redução das componentes harmônicas provenientes do conversor. Ele opera sem consumir potência ativa, a menos das perdas nos elementos passivos e no chaveamento dos semicondutores, realizando tanto a compensação dos harmônicos quanto da potência reativa. Pelo fato desse tipo de filtro utilizar apenas a potência reativa, não há necessidade de uma alimentação independente.
Figura 1.5: Esquema básico de um filtro ativo série Fonte: Dissertação de Rafael Rocha Matias
Pode-se observar que a tensão da fonte de alimentação está ocasionalmente distorcida, daí a tensão de filtro é gerada a partir da medição de de forma que a soma, mediante o transformador conectado em série, resulte numa tensão de carga puramente senoidal. Pelo fato da conexão do filtro série ser feita por um transformador, a corrente da carga é a mesma que circula no filtro, essa talvez seja a principal desvantagem dessa topologia, pois devido a esse fato tem-se que manipular correntes da ordem da corrente de carga, resultando em maiores perdas de chaveamento. Para reduzir a corrente que circula nos conversores se faz o uso da relação de transformação do transformador, e nesse caso, a corrente diminui na mesma proporção que a tensão aumenta.
1.3.1.3 – Filtros Híbridos – Esse tipo de filtro é uma combinação do filtro ativo com o filtro passivo. A finalidade dessa configuração é reduzir as perdas do filtro ativo e neutralizar as desvantagens do filtro passivo. Esse tipo de filtro possui várias configurações, porém, daremos ênfase a três tipos:
Filtro ativo paralelo com paralelo passivo (AP + PP);
Filtro ativo série com paralelo passivo (AS + PP);
Essas estruturas podem ser vistas na figura 1.6:
Figura 1.6: Configurações de filtros híbridos: (a) AS + PP, (b) AS em série com PP, (c) AP + PP
Fonte: Dissertação de Rafael Rocha Matias
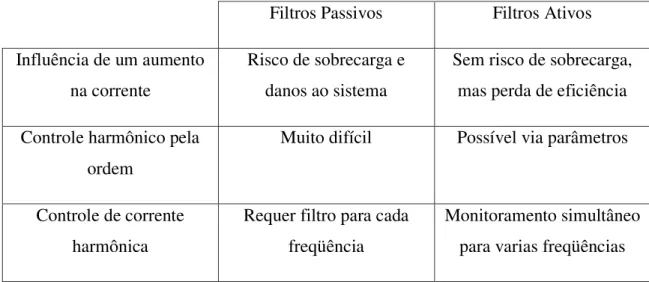
O uso desse filtro é mais adequado em aplicações de alta potência. Na tabela abaixo é possível comparar o filtro passivo com o ativo, evidenciando algumas desvantagens do filtro passivo.
Tabela 1.3: Comparação entre filtro passivo e ativo Fonte: Dissertação de Rafael Rocha Matias
Filtros Passivos Filtros Ativos
Influência de um aumento na corrente
Risco de sobrecarga e danos ao sistema
Sem risco de sobrecarga, mas perda de eficiência
Controle harmônico pela ordem
Muito difícil Possível via parâmetros
Controle de corrente harmônica
Requer filtro para cada freqüência
Influência da variação de freqüência
Redução de eficiência Sem grandes efeitos
Influência de uma modificação de
impedâncias
Risco de ressonância Sem grandes efeitos
Modificação da freqüência fundamental
Não pode ser modificado Possível via reconfiguração
Dimensões Grande Pequeno
Peso Elevado Baixo
A configuração mais usada desse tipo de filtro segundo, (Peng, F. P.; Akagi, H.; Nabae, A., 1988) é o (AS + PP), essa configuração é utilizada onde se deseja compensar a tensão da fonte e diminuir os harmônicos de corrente da carga, nesse caso, o filtro passivo pode também ser sintonizado para altas freqüências. A configuração (AS em série com PP) faz com que as características de filtragem fiquem independentes da impedância da fonte e diminui a potência do filtro ativo usado isoladamente, tal estrutura foi estudada pela (IEEE, 1991). A estrutura (AP + PP) é utilizada em aplicações onde é
indicado o uso de um filtro paralelo, tal estrutura geralmente é projetada para que o filtro passivo compense os harmônicos de baixa ordem e o filtro ativo compense os harmônicos de ordem mais elevada e a potência reativa. Existem outras configurações que são apresentadas por (Singh, B., 2005).
1.3.2 – Classificação quanto à técnica de controle e método de detecção de componentes harmônicas
Essa é a parte mais importante do filtro ativo, pelo fato do controle ser responsável pelo comando das chaves. O bloco de controle é o que envolve a medição e condicionamento de sinais. No outro lado, tem-se a parte de comando das chaves onde é feito um novo condicionamento do sinal de saída, já resultante da estratégia de controle, para os drivers das chaves. Dentre as estratégias de controle que podem ser utilizadas,
podemos citar: controle por histerese, lógica fuzzy, redes neurais, entre outros. O controle pode ser realizado tanto analogicamente que é menos comum, quanto digitalmente, onde se tem o destaque do uso dos processadores digitais de sinais (DSP), que são bastante utilizados para a implementação da estratégia de controle, ficando responsável por todo tratamento matemático dos sinais.
1.3.2.1 – Controle em malha aberta – Segundo (Mehta, P.; Dahwish, M. K.; Thomson, T., 1989) o controle em malha aberta é o tipo de controle que é menos comum e raramente utilizado, porém, é uma estratégia de controle simples e pode ser empregada onde se queira a eliminação de harmônicos pela injeção do terceiro harmônico e dispositivos de cancelamento harmônico.
1.3.2.2 – Controle em malha fechada – É um tipo de controle que é comumente utilizado por possuir uma ampla variedade de aplicações, com ele é possível ter um controle dinâmico de atuação do filtro. Essa dinâmica provém da comparação da variável de controle empregada com a referência desejada, de modo que essa diferença é perceptível ao sistema de controle quando ocorrem variações no comportamento das tensões e/ou correntes.
1.3.2.3 – Detecção no domínio do tempo – Nesse método os sinais são lidos e tratados
no próprio domínio do tempo. A teoria “p-q” desenvolvida por (Akagi, H.; Kanazawa, Y.; Nabae, A., 1984 e Akagi, H.; Nabae, A., 1993) é amplamente utilizada. Ela se baseia
na transformação “α-β” de tensão e corrente para a obtenção dos sinais de controle. A
compensação de tensão ou corrente são obtidos. No referencial “d-q” as variáveis são
transformadas sincronamente para um referencial girante com freqüência da componente fundamental, desse modo, as variáveis tornam-se cc e os sinais de comando baseado no conteúdo harmônico são retirados.
1.3.2.4 – Detecção no domínio da freqüência – Esse método se baseia na teoria de Fourier, por meio da qual os sinais de tensão ou corrente são extraídos para o comando de compensação. A sua forma de implementação é normalmente encontrada conforme a subdivisão mostrada a seguir:
Transformação Rápida de Fourier (FFT) – Neste método é empregado o algoritmo FFT para a resolução da série de Fourier. Esse método consiste na geração dos sinais de compensação no domínio do tempo pela transformação inversa da FFT após a separação dos sinais harmônicos, após isso os sinais são enviados para a determinação dos comandos de abertura e fechamento das chaves de cada braço do conversor. Esse método não é indicado para sistemas de dinâmicas rápidas.
Multiplicação dos senos – Neste método ocorre uma multiplicação do sinal de corrente por um seno de freqüência fundamental e o resultado é integrado. Este resultado é equivalente a uma filtragem passa-baixa. Esta técnica é semelhante a anterior.
1.4 – HISTÓRICO DO DESNVOLVIMENTO DAS TÉCNICAS DE MELHORIA DA QUALIDADE DE ENERGIA
Aproximadamente entre 1910 até 1960, as cargas não-lineares eram produzidas por grandes usuários industriais eletroquímicos ou eletrometalúrgicos. Estes desenvolveram um meio de limitar as correntes harmônicas produzidas no seu processo. A primeira forma de retificação elétrica foi realizada por meios mecânicos. Uma peça do acionamento de um motor elétrico fisicamente fecha e abre uma chave no instante preciso da onda de tensão senoidal para fornecer tensões e correntes continuas para a carga. Porém, os retificadores mecânicos foram rapidamente substituídos por equipamentos estáticos, incluindo diodos de mercúrio, selênio e silício, tiristores (SCRs) e finalmente GTOs. Porém, a primeira forma de compensação das componentes harmônicas empregados na engenharia elétrica foi o uso de elementos passivos tais como: indutores, resistores e capacitores, atuando como filtro. O uso desses filtros começou no inicio do século XX e resolvia bem o problema das componentes harmônicas encontradas, mas na medida em que os níveis de distorção harmônica foram aumentando, foi necessário o desenvolvimento de novas técnicas de compensação.
Entre outras técnicas utilizadas pode-se citar: injeção do terceiro harmônico desenvolvida por Bird, B. M.; Marsh, L. F.; Mclellan, P. R. (1969), podemos citar também a técnica de refinamento da injeção de corrente (que é um desenvolvimento da técnica anterior) feita por Ametani, A. (1972). Wilson, T. G. (200) cita o amplificador magnético, desenvolvido por E. F. W. Alexanderson da General Eletric Company em 1912, como sendo o primeiro dispositivo a atender os objetivos da eletrônica de potência.
Em 1971 Sasaki e Machida introduziram o conceito de compensação ativa, que segundo (Clark, S. L.; Famouri, P.; Cooley, W. L., 1994) este método se apresenta de uma forma geral, como um método que se baseia em retirar uma amostra da corrente da carga que se deseja eliminar do ponto de vista da fonte, amplificá-la e inseri-la em um tap extra do transformador entre a carga e a fonte, de forma que esta corrente
provoque um fluxo contrário ao fluxo provocado pelos harmônicos.
uma forma de onda de corrente de dois níveis, este trabalho foi pioneiro na compensação ativa de harmônicos. Com a publicação de (Mohan, N. et al, 1977), os princípios básicos
dos filtros ativos foram finalmente estabelecidos.
O desempenho do filtro ativo está fortemente relacionado aos dispositivos semicondutores empregados, e na estratégia de controle empregada. Somente com desenvolvimento de chaves tipo disparo e bloqueio controlado é que foi possível implementar os filtros paralelos de forma mais fácil e pratica, o que aconteceu por volta de 1980. Em 1984 houve um salto na estratégia de controle, pois, Akage et al propuseram a teoria “p-q” e desenvolveram uma topologia de conversor tipo PWM-VSC para a compensação da potência reativa instantânea. O avanço trazido por esta estratégia de controle foi à eliminação de uma fonte de alimentação dedicada para o filtro ativo, pois se mostrou que a compensação, tanto harmônica quanto reativa, pode ser realizada sem o uso de potência ativa.
Outras técnicas surgiram no decorrer do tempo e na tabela abaixo contém de forma resumida a evolução dessas técnicas:
Métodos Autores Características
Compensação de Fluxo Magnético
Sasaki e Machida
(1971)
Produz um fluxo magnético oposto ao fluxo produzido pelos harmônicos.
Injeção de harmônicos
específicos
Bird, et al
(1969)
Injeta o terceiro harmônico de corrente
A.Ametani
(1972)
Generalização do método de Bird.
Filtragem ativa de harmônicas usando inversores
PWM
Gyugyi e Strycula
(1976)
Injeção de correntes usando PWM VSC e CSC.
Akagi, et al
(1984)
Introdução da teoria “p-q” e
Hayashi, et al
(1988)
Injeção de uma corrente usando o PWM-CSC, o filtro é controlado pelo domínio da freqüência.
Kim, et al
(2004)
Injeção de corrente usando PWM
Fisher e Hoft Condicionamento trifásico
Shashani Compensador estático VAR com GTOs
Morán. et al
(2000)
Compensador de fator de potência e harmônicos usando PWM-VSC.
Enjeti, et al
(1988)
Técnicas programadas de PWM
Chow, et al PWM +Filtro Ativo
Williams e Hoft Condicionamento de linha: Uma ponte a GTO + PWM.
Tabela 1.4: Técnicas de melhoria na qualidade de energia Fonte: Dissertação de Rafael Rocha Matias
1.5 – REVISÃO BIBLIOGRÁFICA
Entre as utilizações do filtro ativo paralelo podemos citar que Alexandre Rodrigues Vaz (2006) utiliza o filtro ativo paralelo como pré-regulador boost trifásico e
monitoramento da corrente de rede. Já Angelo Feracini Neto (2009) apresentou um estudo de três topologias de Filtros Ativos Paralelos de Potência aplicados a sistemas elétricos trifásicos a quatro fios: Split-Capacitor, Four-Legs e Three Full-Bridge, onde
ele utilizou um método de compensação para sistemas trifásicos a quatro fios, o qual é baseado num método de compensação para sistemas monofásicos no referencial síncrono (SRF –Synchronous Reference Frame). Por outro lado Rodrigo Augusto Modesto (2007)
apresenta um método de compensação ativa de potência, aplicado a um filtro ativo paralelo (FAP) monofásico, onde a estratégia proposta para gerar a corrente de referência
de compensação para o filtro ativo paralelo é baseado no sistema de eixos de referência síncrona (SRF – Synchronous Reference Frame). Já Paulo Vitor Silva (2010) utilizou o
filtro ativo paralelo aplicado a um gerador de indução trifásico, onde a sua estratégia de controle voltou-se para o controle de excitação da máquina e para a minimização das componentes harmônicas na corrente de saída do gerador.
1.6 – OBJETIVOS
Este trabalho tem a finalidade de mostrar a utilização dos filtros ativos paralelos monofásicos para a correção do fator de potência e o filtro de componentes harmônicas, conforme visto anteriormente. Os filtros ativos paralelos possuem diversas aplicações e dentre elas podemos perceber que a utilização para correção do fator de potência e para eliminação de componentes harmônicas são bastante utilizadas, o que irá diferenciar o nosso trabalho dos demais oferecidos pela literatura é a técnica de controle a ser utilizada que para o nosso caso, foi utilizada para o controle do filtro um controlador de malha externa de tensão e um controlador de malha interna de corrente, que tem por objetivo controlar a tensão no barramento C.C. e a corrente de entrada, de modo que com o controle dessas duas variáveis o fator de potência seja corrigido.
1.7 – ORGANIZAÇÃO DO TRABALHO
A estrutura geral desse trabalho é descrita nos parágrafos a seguir:
No segundo capítulo nós analisaremos de fato o filtro ativo paralelo, nele irá conter uma introdução sobre esse tipo de filtro, como foi feita a modelagem do mesmo e também foram feitas as analises do filtro em regime permanente.
No terceiro capítulo, abordar-se-á o sistema de controle do filtro, nele irá conter uma introdução sobre o sistema de controle, as modelagens dos controladores que irão ser utilizados e também irá se falar do controle do chaveamento (PWM).
No quarto capítulo foram iniciados os testes da utilização do filtro ativo paralelo, em nível de simulação e foram feitas as devidas analises.
No quinto capítulo foram feitas toda a parte experimental de modo que irá conter varias montagens, sendo analisadas caso a caso.
CAPÍTULO II
FILTRO ATIVO PARALELO
2.1 – INTRODUÇÃO
Neste capítulo é desenvolvida a modelagem e analise de regime permanente do filtro ativo paralelo. Como mencionado anteriormente, o filtro ativo paralelo é utilizado para a compensação da corrente da carga, fazendo com que a corrente da fonte só possua a componente fundamental e esta esteja em fase com a tensão, porém, este mesmo filtro pode também ser utilizado para a compensação da tensão de carga.
Pela modelagem do sistema podem-se obter as equações que regem o sistema a ser estudado e a partir destas equações poderemos fazer o projeto dos controladores. Pela análise do regime permanente do sistema, podemos conhecer os valores de tensões e correntes do mesmo, assim podendo observar os efeitos do fator de potência da fonte na tensão de carga.
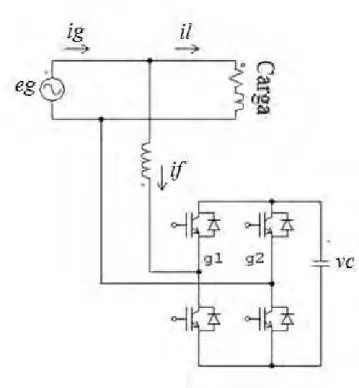
2.2 – MODELAGEM DO FILTRO PARALELO
Figura 2.1: Modelo do filtro ativo paralelo monofásico
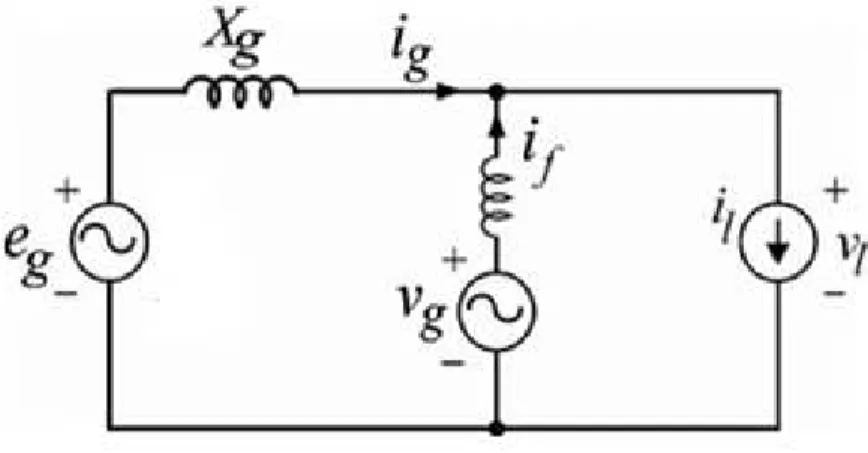
Neste modelo representa a tensão de entrada, representa a tensão do filtro paralelo. , , representam respectivamente, as correntes da fonte, do filtro e da carga. Pela analise do modelo monofásico, desprezaremos a resistência das indutâncias, chegando às seguintes equações:
Manipulando as equações (2.1), (2.2), (2.3) e (2.4) conforme mostrado no apêndice A1, obtém-se:
Figura 2.2 – Circuito equivalente a expressão (2.5)
2.3 – ANÁLISE DE REGIME PERMANENTE
2.3.1 – Análise de regime permanente senoidal
Nessa seção serão feitas as análises de regime permanente do filtro ativo paralelo, desprezando as resistências das indutâncias e aplicando uma entrada senoidal com fator de potência unitário. Para as condições apresentadas utilizaremos expressões a seguir:
Sabendo-se que se utiliza o sinal + para potência positiva na fonte e o sinal –
para potência negativa na fonte.
Sabe-se que:
Sabe-se que é a potência média fornecida (ou absorvida) pela fonte e entregue (ou recebida) a fonte .
Quando o circuito alimentar uma carga linear passiva com , tem-se:
Onde é o ângulo de fator de potência da carga. Logo a potência na carga é:
Manipulando a expressão (2.13), chegaremos à expressão:
Portanto a potência média na fonte é idêntica a potência na carga, logo, obtém-se a obtém-seguinte expressão:
Portanto:
Percebeu-se, que se o , então
,
portanto, tem-se:
Percebeu-se também, que se o , então o
, portanto, tem-se:
A tensão agora será dada por:
Sabendo-se que e são definidos no apêndice A2, sabe-se que a derivada de para é:
Seja,
Logo:
Como:
De modo análogo a condição de sabemos que quando o
teremos as seguintes expressões:
Logo:
Como foi definida pela expressão (2.23), substituir-se-á a expressão (2.23) na expressão (2.27). Logo:
Utilizando-se , logo, percebe-se que a tensão é:
Logo, pode-se observar que a potência na fonte será:
Manipulando a expressão (2.30), obtém-se:
Percebeu-se que a potência na fonte é a mesma tanto para o quanto para o . Ou seja, não há potência média fornecida por devido a esse fator percebeu-se que o filtro não precisa de fonte de potência ativa.
2.3.2 – Análise de regime permanente com a presença de componentes
harmônicas
Nessa seção serão feitas as análises de regime permanente do filtro ativo paralelo, para uma carga que possui a presença de componentes harmônicas, para essa análise irão se desprezar as resistências das indutâncias.
Para a análise do regime permanente, iremos utilizar as expressões (2.6), (2.7), (2.8), (2.9), (2.10), (2.11) e (2.23).
De modo análogo a expressão (2.23), percebe-se que a expressão da indutância da fonte é:
Com a presença das componentes harmônicas na carga, tem-se:
Fazendo as manipulações conforme mostrado no apêndice A3, tem-se:
Com isso percebemos que é puramente AC. Já o termo :
Manipulando (2.35) tem-se:
Com isso percebemos que é puramente AC. Logo:
Manipulando (2.37) tem-se:
Com isso percebemos que é puramente AC. Logo:
Manipulando a expressão (2.40) tem-se:
Manipulando a expressão (2.41) tem-se:
Manipulando a expressão (2.42) tem-se:
Manipulando a expressão (2.43) tem-se:
Manipulando a expressão (2.45) tem-se:
Podemos observar que para , teremos termos de potência puramente AC
em . Por outro lado quando , teremos o termo AC e o termo
será zero. Ou seja, o valor médio de também é zero. Ou seja, é puramente AC.
2.4 – CONCLUSÕES
Neste capítulo foi analisado o filtro ativo paralelo. Nele foi realizada a modelagem do sistema, onde foi possível analisar o efeito do controle do fator de potência (FP=1) em regime permanente para cargas lineares, onde se pode perceber que não há potência média fornecida pela fonte já que ela é a mesma tanto para o
CAPÍTULO III
SISTEMA DE CONTROLE
3.1 – INTRODUÇÃO
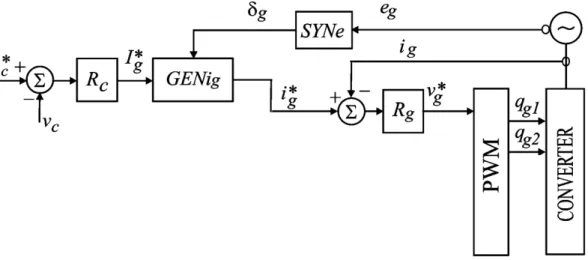
Neste capítulo é apresentado o sistema de controle para o filtro ativo paralelo. O sistema de controle aqui descrito envolve a modelagem dos controladores utilizados bem como o diagrama de blocos do sistema.
Para um filtro ativo, o sistema de controle é o maior responsável pelo seu desempenho, assim, ele deve atuar, de forma que, se comporte como um regulador do fator de potência.
3.2 – ESTRATÉGIA DE CONTROLE
Na figura 3.1 pode-se observar a malha de controle:
3.2.1 – Controle de corrente do filtro ativo paralelo
Pela analise da figura (2.1) pode-se observar:
Sabendo que:
Substituindo a expressão (3.2) na expressão (3.1), tem-se:
Expandindo a expressão (3.3), obtém-se:
Sendo:
Substituindo as expressões (3.5) e (3.6) na expressão (3.4), obtém-se:
Sendo:
Logo, substituindo a expressão (3.9) na expressão (3.8) tem-se:
Substituindo a expressão (3.10) na expressão (3.7), obtém-se:
Aplicando a transformada de Laplace na expressão (3.11), obtém-se:
Onde:
Logo, a função de transferência da planta será:
Manipulando a expressão (3.14), tem-se:
Manipulando a expressão (3.15), tem-se:
Sendo:
Substituindo as expressões (3.17) e (3.18) na expressão (3.16), obtém-se:
Sabemos que:
Logo:
Substituindo a expressão (3.20) na expressão (3.19), tem-se:
Logo:
Assim:
Logo:
Logo a função de transferência em malha aberta será:
Como a expressão do controlador é dada por:
Logo,
Assim:
Portanto:
Substituindo a expressão (3.32) na expressão (3.33), obtém-se:
Logo:
Manipulando a expressão (3.36), tem-se:
Sendo:
Logo:
Voltando para a função de transferência em malha aberta, expressão (3.25), tem-se:
Manipulando a expressão (2.42), obtém-se:
Substituindo as expressões (2.39) e (2.40) na expressão (3.43), obtém-se:
Manipulando a expressão (3.44) tem-se:
Substituindo as expressões (3.17) e (3.18) na expressão (3.45), obtém-se:
Logo:
Sendo:
Substituindo a expressão na expressão , obtém-se:
3.2.2 – Controle de tensão do filtro ativo paralelo
Ainda pela análise da figura (2.1) tem-se:
Com isso temos que a expressão (3.51) é a potência do gerador. Logo, as expressões (3.52) e (3.53) são as potências recebidas.
Então:
Utilizando as expressões (2.14), (2.15), (2.16) e (2.20), substituindo nas expressões (3.51) e (3.52) tem-se:
Manipulando a expressão (3.54) tem-se:
Substituindo as expressões (3.53), (3.55) e (3.56), na expressão (3.57) tem-se:
Seja uma perturbação e definida segundo a expressão abaixo, tem-se:
Logo,
Se assumirmos que o fator de potência é unitário e , tem-se:
Como é definido como:
Logo,
Substituindo a expressão (3.61) na expressão (3.63) tem-se:
Logo,
Aplicando Laplace, obtém-se:
Assim:
Adicionando um controlador PI , logo a malha fechada da entrada será:
Com isso teremos um erro nulo para entrada degrau.
Pela análise da equação (3.69) podemos observar que para o nosso caso a melhor situação seria se tivéssemos os pólos reais e para obtermos os pólos reais teremos que ter o ganho proporcional maior que o ganho integral . Como o controlador foi projetado através de uma simplificação do sistema real o ajusto do controle PI será feita empiricamente.
3.2.3 – Modulação PWM
Modulation (PWM), cujo objetivo é alimentar a máquina com tensões trifásicas variáveis
a partir de um inversor trifásico de tensão.
O processo consiste na comparação de dois sinais de tensão, um de baixa frequência (referência) e outro de alta frequência (portadora), resultando um sinal alternado com frequência fixa e largura de pulso variável. Podendo ser explicado em duas fases: modulação do sinal de tensão fundamental de referência segundo a alta frequência da portadora, obtida pelo chaveamento do inversor; demodulação ou recuperação do sinal fundamental da tensão através da corrente da máquina.
Segundo (J. Holtz, 1994; A.M. Trzynadlowski, R. L. Kirlin e S. F. Legowski, 1997; O. Ojo e P. M. Kshirsagar, 2004) a modulação PWM pode ser usado para gerar a propagação de sinais para o sistema.
Considerando que vg* e vl* são as tensões de referência desejada, as
tensões de pólo de referência pode ser expressa como:
As relações (3.70) pode ser reformulada como:
O problema a ser resolvido é como determinar vg10*, vg20*, uma vez que a
tensão desejada vg* foi especificados. As tensões vμg* pode ser calculado com base no fator de aproximação μS que determina:
onde vsmax* = max (Vs) e vsmin* = min (Vs), e Vs = {vs* , 0}, para s = g. A
Os sinais de propagação poderam ser gerados por meio da comparação da modulando dos sinais vg10*, vg20* com um alto sinal de frequência da portadora
triangular.
3.3 – CONCLUSÕES
CAPÍTULO IV
RESULTADOS DE SIMULAÇÃO
4.1 – INTRODUÇÃO
Neste capítulo é apresentada a simulação do sistema de controle de tensão e corrente que foi projetado, de forma a avaliar o funcionamento do mesmo. Para a simulação foi necessário obter os dados da máquina.
Para homologar a estimação, faz-se necessário realizar uma simulação do sistema em operação a fim de observar o funcionamento dinâmico e verificar possíveis erros, nos permitindo aperfeiçoar o algoritmo antes de serem feitos os testes reais na bancada experimental. Os resultados e o algoritmo de simulação foram desenvolvidos no programa PSIM™.
4.2 – SIMULAÇÃO
4.2.1 – Parâmetros utilizados na simulação
Figura 4.1 – Planta da simulação
Inicialmente foram medidos os valores das tensões, resistências e indutâncias da bancada experimental, para tornar a simulação o mais próximo possível dos testes reais. Esses valores podem ser observados na tabela 4.1.
Tabela 4.1 – Parâmetros da simulação Tensão de
entrada
Indutância de entrada
Resistência da carga
Indutância da carga 60 V 10 mH 16.66Ω 100 mH
4.2.2 – Malha de controle da simulação.
O diagrama de blocos da malha de controle é ilustrado na figura 3.1.
proveniente do saturador com um sinal senoidal unitário, devido à senoide passa por um divisor com a finalidade de deixar a senoide com um valor unitário, após a multiplicação, o sinal resultante será uma corrente de referência , ela irá ser comparada com a corrente medida . O produto do erro das correntes em regime permanente será zero, o sinal resultante passará por um bloco PI modificado (PIMOD), posteriormente o sinal resultante do bloco PIMOD passará por outro saturador, o sinal resultante da saída do saturador será comparado com a tensão de entrada , de modo que o sinal resultante da comparação seja uma tensão de referencia desejada.
Os ganhos utilizados na malha de controle serão mostrados na tabela 4.2:
Tabela 4.2 – Ganhos dos controladores Ganho Proporcional do controlador de Tensão Ganho Integral do controlador de Tensão Ganho Proporcional do controlador de Corrente Ganho Integral do controlador de Corrente
Kpvc = 0,08 Kivc = 0,05 Kpg = 30 Kig = 11,322
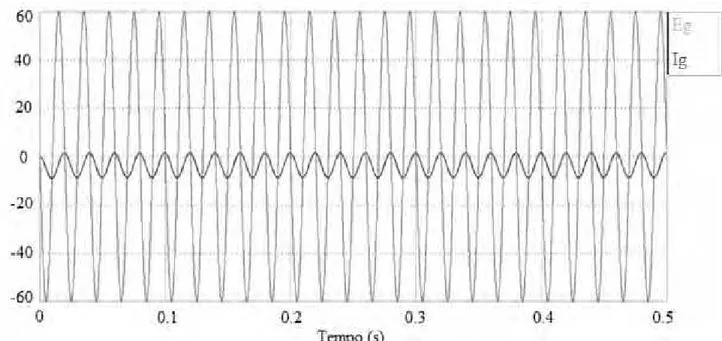
4.2.3 – Resultados
Figura 4.2 – Sistema alimentando uma carga linear
Figura 4.4 – Formas de onda tensão e corrente da rede monofásica alimentando uma carga RL com o filtro operando, correção do fator de potência para aproximadamente 1
Nas figuras 4.6 e 4.7 foi inserida uma ponte a diodo com o propósito de se adicionar uma carga não-linear. O objetivo dessa adição é de mostrar que mesmo com a presença de componentes harmônicas, provenientes da carga não-linear o filtro continua a controlar o fator de potência de modo satisfatório. Para esse segundo experimentos adicionamos uma ponte retificadora no sistema conforme ilustrado na figura 4.5.
Figura 4.6 – Tensão e corrente da rede monofásica alimentando uma carga não linear sem filtro
Figura 4.7 – Tensão e corrente da rede monofásica alimentando uma carga não linear com filtro
4.3 – CONCLUSÃO
CAPÍTULO V
RESULTADOS EXPERIMENTAIS
5.1 – INTRODUÇÃO
Neste capítulo são apresentadas as descrições dos equipamentos utilizados para montagem da bancada experimental e, em seguida, serão apresentados os resultados experimentais obtidos com a implementação do algoritmo de controle do fator de
potência no DSP alimentado através de um inversor de frequência. O experimento segue os seguintes procedimentos: Inicialmente a carga é acionada, após o acionamento, verifica-se o fator de potência, após a verificação é feito o controle do mesmo e por fim, faremos a aquisição dos dados, com a finalidade de fazer um tratamento do sinal via programas computacionais de modo a tornar mais fácil a visualização das formas de onda. Os resultados experimentais serão apresentados no decorrer do capitulo e o sistema estudado pode ser observado na figura 4.3 para cargas lineares e na figura 4.6 para cargas não-lineares.
5.2 DESCRIÇÃO DO HARDWARE
Na Figura. 5.1 é ilustrado o hardware utilizado para no experimento.
O protótipo construído para o estudo experimental contém dois inversores trifásicos, implementados através do módulo Three Phase Inverter SKS 25F B6U +
de um variador de tensão trifásico conectado a rede elétrica, com uma tensão de 380 V de linha. Na Figura 5.2 são mostradas as diversas partes constituintes do inversor de frequência implementado.
Figura 5.1 – Hardware montado para o acionamento do motor
Figura 5.2 – Inversor montado com módulos da Semikron®
Para o acionamento dos interruptores IGBTs foram especificados os circuitos de comando (drivers) SKHI 23/12 (R), fabricados pela Semikron®. O funcionamento do drivers é o seguinte: pares de pulsos de controle são aplicados em pinos dos conectores
Geralmente os circuitos dos drivers possuem proteção no caso de aplicação de
dois pulsos ao mesmo tempo em nível alto nas entradas de comando de dois IGBTs na mesma fase da ponte. Os pulsos são bloqueados e é gerada uma sinalização de erro.
Os drivers também possuem uma configuração para inserir tempos de retardo
(tempo morto) entre o início de um pulso de ativação de um IGBT e o bloqueio do outro da mesma fase.
As características de destaque dos drivers SKHI 23/12 (R) são: o módulo
comanda dois transistores de forma independente; prevê o intertravamento para a operação em um único braço; comanda IGBTs com tensões (VCE) até 1200V; gera o tempo morto desejado dentre um número de opções, compatível com tensões de entrada de 5V e 15V; proteção de curto circuito por meio do monitoramento de VCE; possui isolação através de transformadores e monitora tensões para que o valor permaneça acima de 13V.
Os drivers foram ajustados para operar com um tempo morto de 2,5μs, que
representa 2,5% do tempo de comutação. Na Figura 5.3 é ilustrado o driver utilizado.
Figura 5.3 – Foto do driver SKHI 23/12 (R) da Semikron®
5.2.1 Processador Digital de Sinais (DSP) embarcado
Neste trabalho foi utilizado um kit de aplicação chamado “eZdspTM F28335 Starter Kit” fabricado pela empresa Spectrum Digital contendo o DSP TMS320F28335
A eZdspTM F28335 é uma placa stand alone que permite ao desenvolvedor testar e utilizar o DSP TMS320F28335. Diversas portas de expansão estão presentes na placa permitindo assim a sua integração ao resto do sistema.
A placa conta ainda com interface USB para conexão com computador e conector JTAG para interface com emuladores para Debug rápido.
Na Figura 5.4 está mostrada uma vista geral da placa de desenvolvimento utilizada, onde no centro, em maior tamanho pode-se observar o soquete do DSP.
Figura 5.4 – Kit de desenvolvimento eZdspTM F28335com placa de proteção
A placa será utilizada de forma independente do computador (stand-alone code), o qual deve ser utilizado para instalação do ambiente de programação e