Centro de Ciênias
Departamento de Computação
Pós Graduaçãoem Ciênia da Computação
Mestrado em Ciênia da Computação
Integração de Heurístias Lagrangeanas om
Algoritmos Exatos para a Otimização de
Partiionamento de Conjuntos
Alexsandro de Oliveira Alves
Centro de Ciênias
Departamento de Computação
Mestrado em Ciênia da Computação
Integração de Heurístias Lagrangeanas om
Algoritmos Exatos para a Otimização de
Partiionamento de Conjuntos
Alexsandro de Oliveira Alves
(alexsandrolia.uf.br)
Dissertação submetida ao Programa de
Mestrado e Doutorado em Ciênia da
Computação da Universidade Federal
do Ceará omo requisito parial para
obtenção de grau de Mestre em Ciênia
da Computação.
Orientador: RafaelCastro deAndrade
Aos meus pais, peloapoio morale naneiro.
E,deformaespeial,àminhaesposa FatiéliaFrotapeloarinhoompartilhadoepelos
Em primeiro lugar, agradeço a Deus, meu únio e suiente Salvador, pelo dom da
vida. Agradeço por ser meu refúgio e minha proteção e por me dar disernimento e
serenidadenos momentosdeisivos daminha vida.
Agradeço aos meus pais por proporionarem a minha eduação e formação
aadêmia. Agradeço aos meus familiares pelos inentivos e por sempre estarem
dispostos a meajudar.
AgradeçoàminhaesposaFatiéliaFrota, peloamor,arinho,respeito, ompreensão
eompanheirismoque,juntamenteom abenção egraçade Deus, me sustentam eme
inentivama sempre areditar elutar pelos meus sonhose objetivos.
Agradeço a todos os professores da Universidade Federal do Ceará UFC e da
Universidade EstadualdoCearáUECE queforamresponsáveispelaminhaformação
aadêmia, e, em espeial, ao Prof. Maros José Negreiros Gomes que além de
eduadore professor,tornou-se um amigoque sempreareditouna minhaapaidade,
perseverançae seriedade. Sempre quedele preisamos, eleestá disposto aajudar.
Agradeço aomeu orientador Prof. RafaelCastro de Andrade,porter aeitadome
orientarapartirdosegundo anodoMestrado,apósdeisõesdifíeisedesaadorasque
tive quetomar. Agradeçoporsua orientação, apoioe ompreensão.
Agradeço aos membros da bana por terem aeito prontamente o onvite para
partiiparda omissãoexaminadora desta dissertação de Mestrado.
Agradeço aos meus olegas do grupo de pesquisa ParGO (Paralelismo, Grafos e
Otimização)edoLAB2pelatroadeexperiênias, emespeial aoÍtalo,AlineePablo
om quem tive maior proximidade.
Agradeço a todos os olegas e amigos da UECE, que junto omigo onstituíram a
eTenológio pelonaniamentoda minha bolsade estudos durante o Mestrado.
Neste trabalho avaliamos métodos heurístios e exatos para o Problema de
Partiionamento de Conjuntos (PPC). Realizamos testes omputaionais om
heurístias lagrangeanas baseadas em algoritmos gulosos, busa tabu e método de
otimizaçãopelosubgradiente. Osresultadosobtidos,omparadosomosdaliteratura,
omprovam a eiênia de nossas heurístias na obtenção de limites inferiores e
superiores de boa qualidade, em tempo omputaional razoável, para instânias da
literatura. Utilizamos um esquema de Branh and Bound para tentar resolver
instânias do PPC à otimalidade e para omprovar a qualidade dos resultados
alançadospornossas heurístias.
PALAVRAS CHAVE: Partiionamento de onjuntos. Busa tabu. Heurístias
In this work we evaluate both exat and heuristi methods for the set partitioning
problem (SPP). These heuristis are based on greedy algorithms, tabu searh and
subgradient optimization. Computational experiments performed on benhmark
instanes of the problem indiate that our heuristis are ompetitive with existing
ones from the literature in obtainingboth lower and upper bounds of good quality in
reasonableexeutiontime. WeuseaBranhandBoundalgorithmthatallowstoprove
optimalityofsolutionsobtainedbyourheuristisforalargesetofbenhmarkinstanes
oftheSPP.Thus,weshowthatourheuristisareeientinobtainingfeasiblesolutions
of goodqualityfor this problem.
KEYWORDS: Set Partitioning. Tabu Searh. Lagrangian Heuristis. Subgradient
Lista de Algoritmos ix
1 Introdução 1
2 Coneitos Básios 3
2.1 Problemade Partiionamentode Conjuntos . . . 3
2.2 Problemade Reobrimentode Conjuntos . . . 4
2.3 Problemade Paking . . . 4
2.4 Apliações . . . 5
2.5 Revisão Bibliográa . . . 6
3 Estratégias de Resolução 8 3.1 Ténias de Pré-proessamento . . . 8
3.1.1 Colunas iguais. . . 9
3.1.2 Linhas dominantes e linhas iguais . . . 9
3.1.3 Clique de linha . . . 10
3.2 Heurístia GulosaConstrutiva . . . 11
3.2.1 Critério de seleção de Chvàtal . . . 11
3.2.2 Critérios de seleção de Balas eHo . . . 12
3.2.3 Critérios de seleção de Vasko e Wilson . . . 12
3.3 Busa Tabu . . . 12
3.4 Relaxação Lagrangeana. . . 15
3.5 Heurístia de Otimização peloSubgradiente . . . 16
3.5.1 Subgradiente . . . 16
3.5.2 Otimização pelo subgradiente . . . 17
3.6 Heurístia LagrangeanaPura . . . 18
3.7 Heurístia Lagrangeanade Custo Complementar . . . 18
3.8 Algoritmo de Integração . . . 18
3.9 Branh and Bound . . . 19
4 Resultados Computaionais 24 4.1 Introdução . . . 24
4.2 Pré-proessamento . . . 25
4.3 MIP Cplex. . . 28
4.4 Busa Tabu . . . 30
4.7 Resultados da Literatura . . . 38
4.7.1 Algoritmo genétio . . . 38
4.7.2 Algoritmo função dual subaditiva . . . 40
5 Considerações Finais e Trabalhos Futuros 44
3.1 Algoritmo BusaTabu . . . 14
3.2 Ténias de redução e onstrução de solução viávelpara o PPC . . . . 19
3.3 Otimização pelo subgradientee heurístias lagrangeanas . . . 20
3.4 Branh-and-Bound . . . 22
Introdução
Neste trabalho apresentamos heurístias lagrangeanas baseadas em algoritmos
onstrutivos gulosos, meta-heurístia busa tabu e otimização pelo subgradiente para
obtenção de limites inferiores e superiores para o Problema de Partiionamento de
Conjuntos (PPC). Um esquema de Branh and Bound é empregado na tentativa de
provara otimalidadede soluções enontradas por nossasheurístias.
O PPC é um problema de otimização ombinatória NP-difíil [25℄ que possui
apliações prátias tais omo esalonamento de tripulação de linhas aéreas [32℄,
roteamento de veíulos [24℄, redistribuição polítia de território [43℄, loalização de
failidades[7℄, investimento de apitais eprojetode iruitoselétrios[43℄.
As prinipaismotivaçõespara a realizaçãodeste trabalhosão desenvolver métodos
apazes de obter boas soluções viáveis para o PPC, investigando om maior
profundidadeousode algoritmosmeta-heurístiosassoiadosaalgoritmosexatospara
resolverinstânias da literatura.
A inovação destetrabalhoestá naformaomoas ténias de resolução (algoritmos
gulosos,busatabuemétododeotimizaçãopelosubgradiente)foramorganizadaspara,
em onjunto,obter limitesinferiores e superiores de boa qualidadepara instânias da
literatura. Osresultados obtidos mostramque nossas heurístias são ompetitivasem
relaçãoàsexistentes naliteratura. Utilizamosumesquemade BranhandBound para
omprovara qualidadedos limitesobtidos por nossas heurístias.
Parte dos resultados heurístios deste trabalhoestão publiados em[2℄, tendosido
para aresolução desse problema.
O trabalho está organizado omo segue. No próximo apítulo denimos o PPC e
apresentamos sua formulação lássia de programação inteira. Destaamos uma ±erie
de apliações do PPC, que omprovam a importânia do seu estudo. Em seguida,
fazemos uma revisão bibliográa dos prinipais trabalhos que abordam o PPC. No
apítulo3abordamosasestratégias de resoluçãoeosalgoritmosqueutilizamospara o
PPC.Noapítulo4desrevemos osresultados omputaionaisobtidos,omparando-os
om resultados existentes na literatura. No apítulo 5 apresentamos uma onlusão e
Coneitos Básios
Neste apítulo iniialmente denimos o Problema de Partiionamento de Conjuntos
(PPC)e apresentamossua formulaçãolássia de programaçãointeira. Nasseções2.2
e2.3abordamosproblemasdeoberturarelaionadosaoPPC.Naseção2.4destaamos
as prinipais apliações do PPC. Na seção 2.5 fazemos uma revisão bibliográa dos
prinipaistrabalhos que abordamesse problema.
2.1 Problema de Partiionamento de Conjuntos
Seja
A
= [
a
ij
]m
×
n
uma matriz de elementos 01, ondeM
eN
representam, respetivamente, o onjuntode índies das linhas e das olunas deA
. Cada elementoda matriz é igual a um (
a
ij
= 1
), se a olunaj
obrir a linhai
, ou é igual a zero (a
ij
= 0
),aso ontrário. A ada olunaj
assoiamosum ustoc
j
.Seja
J
(
i
) =
{
j
|
a
ij
= 1
, j
∈ N }
o onjuntode olunasque obre alinhai
∈ M
eR
(
j
) =
{
i
|
a
ij
= 1
, i
∈ M}
oonjuntode linhas oberto pelaolunaj
∈ N
.Um partiionamentoé um onjunto de olunas
N
′
⊆ N
, talque todalinha de
M
éoberta exatamenteporuma das olunas de
N
′
. A soluçãodoproblema onsisteem
min
x
∈{
0
,
1
}
n
n
X
j
=1
c
j
x
j
(2.1)sujeito a:
n
X
j
=1
a
ij
x
j
= 1
, i
= 1
, . . . , m
(2.2)onde atribuímos o valor
x
j
= 1
, se a olunaj
∈ N
(om ustoc
j
) estiver na solução doproblema, ex
j
= 0
, aso ontrário.2.2 Problema de Reobrimento de Conjuntos
OProblemadeReobrimentodeConjunto(PRC)éumarelaxaçãodoPPC.Adiferença
entre eles reside exlusivamente na natureza das restrições dos problemas. O PRC é
denido pelaseguinteformulaçãode programação inteira 01 [30℄:
min
x
∈{
0
,
1
}
n
n
X
j
=1
c
j
x
j
(2.3)sujeito a:
n
X
j
=1
a
ij
x
j
≥
1
, i
= 1
, . . . , m
(2.4)Garnkel e Nemhauser [26℄ abordam um modelo matemátio que leva à
transformação de um PPC em um PRC, enquanto [33℄ mostram a onversão entre
esses problemas através de métodos algébrios.
2.3 Problema de Paking
OPPC,segundo[30℄,podeseronsideradoumasopartiulardoProblemadePaking
(PP), ujafomulaçãomatemátia é denida omo segue:
max
x
∈{
0
,
1
}
n
n
X
j
=1
c
j
x
j
(2.5)sujeito a:
n
X
j
=1
OonjuntoderestriçõesdoPPondiionamaoberturadisjuntadaslinhasdamatriz
A
porumsubonjuntos desuasolunas. OmodelodoPPpossuigrandeapliaçãoprátiana solução do problemas de ortes geométrios, aondiionamento de embalagens e
arregamento de veíulos. Ténias de onversão de um PPC em um PP podem ser
onsultadasem [30℄.
2.4 Apliações
Muitosproblemas de otimizaçãoombinatóriapodem ser modeladosomoum PPC, o
quejustia a variedade de áreas de apliaçãodesse problema, taisomo:
•
Aloação de serviços de emergênia [43℄.•
Aloação de tripulação emlinhas aéreas [32℄.•
Análisede amostrasde sangue[38℄•
Balaneamento de apaidade emlinhas de produção [43℄.•
Caminho emGrafos[30℄.•
Distribuiçãodotráfego de omuniaçõesemsatélites [43℄.•
Estoagem de itens sujeitos àdeterioração [30℄•
Gestãoestratégia [26℄.•
Investimentode apitais[43℄.•
Loalizaçãode failidades [43℄.•
Lógiasimbólia[17℄.•
Planejamentode adeia de suprimentos [30℄.•
Planejamentode tarefas [30℄.•
Problemade oloração de grafos[30℄.•
Problemade orte [30℄.•
Projeto de iruitos[30℄.•
Reuperaçãode informaçõesembano de dados [5℄.•
Roteamento de petroleiros[23℄.de tripulação em linhas aéreas é provavelmente a área de apliação mais estudada do
PPC [20℄. A variedade de apliações do PPC reete a importânia do estudo desse
problema, bemomo a busapormetodologiaseientes para soluioná-lo.
2.5 Revisão Bibliográa
Com relação ao problema de esalonamento de tripulação em linhas aéreas, itamos
os seguintes trabalhos. Lavoie, Minoux e Odier [36℄ apresentam um algoritmo que
aborda a aloação de tripulação omo um problema de reobrimento de onjuntos
e utiliza geração parial de olunas para soluioná-lo. Desaulniers et al [18℄ utiliza
um modelo de uxo de redes om reursos variáveis formulado omo um problema
de programação inteira, não linear e multi-produto. O autor aplia uma extensão do
prinípio da deomposição de Dantzig-Wolfe e reduz o problema para um PPC que
é resolvido pela apliação de um esquema de Branh and Bound. EmdenWeinert
e Proksh [19℄ apresentam uma abordagem para a programação de tripulações via
reozimento simulado (Simulated Annealing). Os autores abordam omo melhorar a
performanedessaheurístianoquedizrespeitoaotempodeexeuçãoeàqualidadeda
solução nal. Ozdemire Mohan [39℄ modelam o problema de aloação de tripulações
omo um grafo, no qual os vérties são os vos e as arestas representam restrições
de dependênia entre os vos. Cada aminho no grafo é uma seqüênia fatível de
vos que pode ser assoiada a uma tripulação. O autor aplia a esse modelo um
algoritmo genétio e uma heurístia de busa loal. Pimentel [40℄ propõe uma nova
metodologia para a solução de problemas de reobrimento de onjuntos de grande
porte,om apliaçãonoproblema de aloaçãode tripulaçõesde ompanhiasaéreas. A
autora apresenta uma formulação que divide a solução do problema em duas etapas:
geraçãoderotaseotimização. Naetapadeotimizaçãoédesenvolvidaumametodologia
para resolverproblemas modeladosomo um problema de reobrimentode onjuntos,
enquanto na etapa de geração de rotas é utilizado um algoritmo paralelo, baseado
na meta-heurístia GRASP [41℄. Beasley e Cao [11℄ apliam um algoritmo baseado
emprogramaçãodinâmiapara o problema de esalonamentode tripulaçãoem linhas
aéreas.
ComoexemplosdeestratégiasderesoluçãodoPPC,itamososseguintestrabalhos.
BalasePadberg[6℄destaamasténias deenumeração implíitaemétodosde planos
deortebaseadosnosimplexparaaresoluçãodoPPC.Marsten[37℄desreveasténias
de Branh-and-Bound e de Branh-and-Cut omo sendo as ferramentas, baseadas em
programaçãolinear,maispopularesentrepesquisadoresparasoluionaroPPC.Fleuren
heurístias ao problema dual da relaxação linear para forneer limites inferiores para
um esquema de Branh-and-Bound. Homan e Padberg [32℄ propõem um algoritmo
exato, baseado em Branh-and-Cut que envolve a relaxação linear do problema e a
inorporação de ortes derivados do estudo do politopo do PPC. Atamtürk et al [4℄
apresentamum algoritmoheurístio queinorporaredução doproblema,programação
linear, planos de orte, proedimento dual lagrangeano e ténias de perturbação
dos ustos. Chu e Beasley [15℄ desenvolvem uma heurístia baseada em algoritmos
genétios. Borndörfer [12℄ desenvolve um algoritmo baseado em Branh-and-Cut que
utiliza relaxação linear. Barahona e Anbil [8℄ utilizam um algoritmo de volume para
resolverarelaxaçãolineardoPPC,utilizandoumaextensãodoalgoritmodeotimização
pelosubgradiente, paraalançarsoluçõesprimaiseduaisdeboaqualidade. Segundoos
autores,esseproedimentoérápidoesimples,requerendomenoresforçoomputaional
quandoassoiadoaométodosimplex,epode ser paralelizadode formadireta. Klabjan
[35℄ apresenta um algoritmo que omputa função dual subaditiva (FSO) ótima para
problemas de programação inteira. Oautor mostra omo gerar FSO geradora e omo
obter solução primal ótima para o PPC, utilizando pré-proessamento, desigualdades
de lique, heurístia de expansão baseada em programação linear, proedimento de
geração de linhas e um esquema de Branh-and-Cut. Desigualdades válidas para o
PPC são enontradasem Balase Padberg [6℄ eem Sheralie Lee [43℄.
No próximo apítulo, abordamos as ténias de resolução heurístias e exatas que
Estratégias de Resolução
Iniialmente, abordamos ténias de pré-proessamento para o Problema de
PartiionamentodeConjuntos(PPC).Naseção3.2apresentamosumaheurístiagulosa
onstrutiva e as estratégias de seleção de olunas que adotamos para a obtenção de
soluçõesviáveisparaoproblema. Naseção3.3apresentamosumesquemadebusatabu
paraobtenção de limitessuperiores. Nasseções3.4e3.5abordamos, respetivamente,
umesquemaderelaxaçãolagrangeanaeumaheurístiadeotimizaçãopelosubgradiente
para obtenção de limites inferiores. Nas seções 3.6 e 3.7 apresentamos heurístias
lagrangeanas, que integram as ténias de resolução anteriores om o objetivo de
melhorar os limites obtidos para o PPC. Na seção 3.8 desrevemos o algoritmo de
integração utilizado. Na seção 3.9 abordamos o esquema de Branh and Bound que
adotamos para tentar soluionar oPPC àotimalidade.
3.1 Ténias de Pré-proessamento
Esquemas de pré-proessamento são proedimentos empregados na reformulação de
modelosde programaçãomatemátia,que podem reduzir asdimensões doproblema e
otempode exeução de algoritmosutilizadosnasua resolução. São ténias baseadas
emimpliaçõeslógias derivadas de ondiçõesde viabilidadee otimalidade[4℄.
Para o PPC, proedimentos de redução podem ser apliados para tentar reduzir
as dimensões do modelo de programação inteira, de modo que a solução ótima da
instâniadoproblema original sejaa mesma dainstâniareformulada. Pelaapliação
dessas ténias, olunas redundantes do PPC que jamais poderiam fazer parte de
uma solução viável são removidas. Isso pode, inlusive, resultar na eliminação de
restrições redundantes que são automatiamente satisfeitas quando outras o são. A
reduçãodonúmerodevariáveisede restriçõesaseremonsideradasfazomquealguns
métodos de resolução trabalhem melhor [12℄. No trabalhode Eso [21℄ é mostrado que
Em Borndörfer [12℄, há uma listagem de métodos de pré-proessamento e análises
probabilístiasdausabilidadedeles. Pesquisasreentessobreoempregodessasténias
para oPPC podem ser enontradas emSavelsbergh [42℄ eKlabjan[35℄.
Aseguirapresentamosasténiasdepré-proessamentoqueutilizamosparaoPPC.
3.1.1 Colunas iguais
Seuma oluna
j
∈ N
puderser representada porumaombinaçãodek
outrasolunasde menorusto total, talque
k >
0
, então a olunaj
pode ser removidadoproblema. ConsiderandoS
⊂ N \
j
omosendoumaoleçãodek
olunas,essaténiadereduçãopode ser formalmentedenida omosegue, segundo [44℄. Sejam
j
eS
taisqueR
(
j
) =
[
h
∈
S
R
(
h
)
, ondeR
(
h1
)
∩ R
(
h2
) =
∅
,
∀
h1, h2
∈
S,
Se
c
j
≥
X
h
∈
S
c
h
então aolunaj
∈ N
pode ser removida doproblema.Utilizamos esse método de pré-proessamento partiularmente para
k
= 1
, para eliminarmos toda olunaj
de ustoc
j
que seja igual à olunap
de ustoc
p
tal quej, p
∈ N
ec
j
≥
c
p
. Não implementamos esse proedimento para valores dek >
1
,devidoaograndenúmerodeombinaçõesde olunasaseremanalisadas,queimpliaria
num maior usto omputaional.
No exemplo abaixo, mostramos uma instâniado PPC onde as olunas
j1
ej6
sãoiguais. A oluna
j6
é eliminada,uma vez quec6
> c1
.j1
j2
j3
j4
j5
j6
i1
1 0 1 0 0 1i2
0 1 0 1 0 0i3
1 0 1 1 1 1i4
0 1 0 0 0 0i5
1 0 0 0 1 1c1
= 1
c2
= 3
c3
= 5
c4
= 2
c5
= 4
c6
= 6
3.1.2 Linhas dominantes e linhas iguais
p
podem ser eliminadasdo problema, bem omo a linhap
, uma vez que os onjuntosJ
(
p
)
eJ
(
q
)
passama ser iguais, após aeliminaçãodas olunas deJ
(
q
)
\ J
(
p
)
[35℄.A seguir mostramos um exemplo da apliação desse proedimento numa instânia
do PPC. Na tabela 3.1,
J
(
i5
)
⊆ J
(
i4
)
, então podemos eliminar a olunaj1
, pois a atribuição dela à solução,x1
= 1
, violariaa restrição assoiada à linhai5
. Após a eliminaçãodaolunaj1
,aslinhasi4
ei5
tornam-seiguaisealinhai5
podesereliminada.Natabela3.2, resultanteapósaseliminaçõesnatabela3.1,
J
(
i2
)
⊆ J
(
i3
)
. Asolunasj2
ej5
, que obrema linhai3
mas não obrem a linhai2
, podem ser eliminadas, bemomoa linha dominada
i2
, resultando nainstâniapresente na tabela3.3.Tabela 3.1:
j1
j2
j3
j4
j5
j6
i1
0 1 1 0 0 1i2
1 0 0 1 0 1i3
0 1 0 1 1 1i4
1 0 1 1 0 0i5
0 0 1 1 0 0Tabela 3.2:
j2
j3
j4
j5
j6
i1
1 1 0 0 1i2
0 0 1 0 1i3
1 0 1 1 1i4
0 1 1 0 0Tabela 3.3:
j3
j4
j6
i1
1 0 1i3
0 1 1i4
1 1 03.1.3 Clique de linha
O nome desse método de pré-proessamento se deve ao fato de que uma instânia do
PPCpodeser representadaporum grafoGonexonão orientado [12℄,ondeosvérties
são as olunas
j
∈ N
. Há uma aresta interligando um par de vérties de G quandoelesobrempelomenosuma linhaemomum. Portanto,ada restriçãodoPPC éuma
lique em G e somente um vértie de ada lique pode estar presente numa solução
viáveldo problema.
Este proedimentode redução é denido omo segue, onforme [35℄. Se existir no
PPC uma linha
i
e uma olunaj
, tais quej /
∈ J
(
i
)
eR
(
j
)
∩ R
(
k
)
6
=
∅
, para todok
∈ J
(
i
)
, então podemos eliminaraolunaj
.AinstâniadoPPCaseguirilustraaapliaçãodesseproedimentoparaeliminação
de olunas. Na tabela 3.4, om relação à linha
i1
, temos o onjuntoJ
(
i1
) =
{
j1, j2, j6, j7
}
e seu omplementoJ
(
i1
) =
{
j3, j4, j5
}
. A olunaj5
∈ J
(
i1
)
obrepelo menos uma linha em omum om todas as olunas que obrem a linha
i1
.Conseqüentemente, a oluna
j5
pode ser eliminada do problema, uma vez que aatribuiçãodelaaumasoluçãodoPPC,
x5
= 1
,violariaarestriçãoassoiadaalinhai1
. Atabela3.5mostraainstâniaapósaeliminaçãodaolunaj5
. Omesmoproedimentoé apliado a todas as linhas da instânia à proura de olunas para eliminação que
j1
j2
j3
j4
j5
j6
j7
i1
1 1 0 0 0 1 1i2
0 0 1 1 0 1 0i3
1 0 1 0 1 0 1i4
0 1 0 1 1 1 1j1
j2
j3
j4
j6
j7
i1
1 1 0 0 1 1i2
0 0 1 1 1 0i3
1 0 1 0 0 1i4
0 1 0 1 1 1A seguir apresentamos um algoritmo guloso e as estratégias de seleção de olunas
adotadas para a obtenção de soluções viáveis, que posteriormente são utilizadas num
proedimentode busatabuparaenontrar limitessuperioresparainstâniasdoPPC.
3.2 Heurístia Gulosa Construtiva
Utilizamosuma heurístiagulosaonstrutivaqueutilizaritériosdeseleçãode olunas
para obtenção de soluções primais viáveis para o PPC. Tais ritérios provêm de
heurístiasdesenvolvidas por[5,16,45℄parao problemade reobrimentodeonjuntos.
A heurístia gulosa funiona omo segue. Iniialmente, nenhuma variável é
representada no vetor solução,
x
j
= 0
, j
∈ N
. Ordenamos as variáveis de aordo om o ritério seleionado, dentre os apresentados em 3.2.1, 3.2.2 e 3.2.3. A adaiteração, seleionamos uma variável
r
para ompor uma solução viável (x
r
= 1
). Como onseqüênia, toda olunak
∈ J
(
i
)
\
r
tal que a linhai
∈ R
(
r
)
é eliminada doproblema. Esse proedimento terminaquando uma solução viável é enontrada ouquandoveriamos queo ritériode seleção de olunasadotadonão obtém suessona
determinação de uma solução viável. Cada um dos ritérios de seleção de olunas é
avaliado separadamente pela heurístia e a soluçãoviável do PPC om menor usto é
utilizada,aso sejaenontrada.
Aseguirdesrevemososritériosde seleçãodeolunasimplementadosnaheurístia
onstrutiva gulosa parao PPC.
3.2.1 Critério de seleção de Chvàtal
O ritério de seleção de olunas de [16℄ onsiste na esolha de uma oluna
j
∈ N
doPPC por iteração, para ompor uma solução viável, de aordo om a razão entre o
ustodaoluna
j
,c
j
, ea ardinalidadedoonjuntoR
(
j
)
. Asolunas queapresentam menor razão e não violam as restrições do problema têm preferênia na seleção paraOsritériosde seleçãode [5℄onsistemnautilizaçãodas seguintes funçõesdeavaliação
de olunas:
•
c
j
: ordenação das olunasj
∈ N
do problema pelo usto resente, dandopreferênia àsolunas de menor usto para ompor ovetor solução.
•
c
j
log2
(
k
j)
: ordenação das olunasj
∈ N
doproblema pelarazão entre o usto da olunaj
e ologaritmodo número de linhas obertas nabase2
.•
c
j
k
j
log2
(
k
j
)
: ordenação das olunas
j
∈ N
doproblema pela razão entre oustodaoluna
j
e onúmero de linha obertas, multipliadopelologaritmonabase2
destevalor.•
c
j
k
j
ln
(
k
j
)
: ordenação das olunas
j
∈ N
do problema pela razão entre o ustoda oluna
j
e o número de linhas obertas, multipliadopelologaritmo naturaldestevalor.
Nasfórmulas aima,
c
j
éo usto daolunaj
ek
j
éa ardinalidadedoonjuntoR
(
j
)
. 3.2.3 Critérios de seleção de Vasko e WilsonAlémdas funçõesde avaliaçãomenionadas,utilizamostambémosritériosde seleção
de olunasde [45℄:
•
c
j
k
2
j
: ordenaçãodasolunas
j
∈ N
doproblemapelarazãoentreoustodaolunaj
eo quadradodo número de linhas obertas.•
√
c
j
k
2
j
: ordenaçãodas olunas
j
∈ N
doproblemapelarazãoentrearaizquadradadousto daoluna
j
e oquadrado donúmero de linhas obertas.ea seleçãode olunasde aordoom o índie resenteque as identia.
A solução enontrada pela heurístia gulosa menionada é parâmetro de entrada
paraa meta-heurístiabusa tabu, apresentada a seguir,que tem omoobjetivo obter
limitessuperiores para oPPC.
3.3 Busa Tabu
A meta-heurístia busa tabu (BT) ou tabu searh foi proposta, independentemente,
por [28℄ e por [31℄ e onstitui um proedimento iterativo para resolver problemas de
otimização ombinatória. A BT possui meanismos para esapar de ótimosloais, no
De aordo om [29℄, a BT parte de uma solução viável iniial
s0
∈
S
, ondeS
onstitui o onjunto de soluções viáveis do problema analisado. Em problemas de
minimização omo o PPC, a BT, a ada iteração, explora um subonjunto
V
da vizinhançaV
(
s
)
dasolução orrentes
, embusa de um ótimo loalatravés daseleção da solução vizinhas
′
∈ V
de menor valor, mesmo que o valor de
s
′
seja maior que o
de
s
. A transição entre as soluçõess
→
s
′
, que oorre a ada iteração, onstitui o
que denominamosde movimento. Uma função de avaliação
f
é utilizada para avaliaraqualidadedasoluçãoorrente
s
. Amelhorsoluçãogeradaaté aiteraçãoorrente,s
∗
,
ésempre armazenada.
Para prevenir possíveis retornos a soluções previamente geradas (ilagem), a BT
utiliza uma memóriade urto prazo ou lista tabu, que identia os movimentosmais
reentementerealizados eosimpede deserem exeutadosporum determinadonúmero
|
T
|
de iterações.Movimentos presentes na lista tabu podem ser realizados, aso anova solução
s
′
∈
V
(
s
)
satisfaça oritériode aspiração,quepermitearealizaçãode um movimentotabuseelelevaraumasoluçãoujovalorsejamenordoqueodamelhorsoluçãoenontrada
até então,
s
∗
.
Alistatabuonstituiumamemóriadeurtoprazoquepossibilitaumadiversiação
na busa por novas soluções, à medida que direiona essa busa para novas áreas do
espaço de solução, permitindo a fuga de ótimos loais. Memórias de médio e longo
prazo também são utilizadas para armazenar soluções ompletas e informações de
suas vizinhanças. O uso desses meanismos de memória possibilita estratégias de
aprendizado, que podem ser utilizadas para a realização de busas mais minuiosas
sobre uma região promissora do espaço de busa (intensiação). O armazenamento
dos movimentos e das araterístias histórias das soluções alançadas leva a uma
análise profunda da vizinhança da solução orrente e guia a busa para regiões
inexploradasdo espaço de soluções(diversiação).
Oalgoritmo3.1mostraofunionamentodabusa tabuqueadotamos paraoPPC.
Os parâmetros de entrada são denidos omo segue.
f
é uma função de avaliação desoluções.
h
é a função de aspiração que avalia se o melhor movimento da iteraçãoorrente,
Iter
,está nalista tabu edeterminaa suarealização seanovasoluçãogeradativer usto inferior ao da melhor solução onheida.
|V|
india a ardinalidade doonjuntodesoluçõesexistentesnavizinhança
V
(
s
)
dasoluçãoorrentes
aadaiteração.BT
max
india onúmeromáximo de iteraçõessem melhorianousto damelhorsoluçãoviávelenontrada,queonstituioritériode paradaadotadonanossabusatabu.
A
ec
são, respetivamente, amatriz de restriçõese ovetor de ustos das olunasdoPPC.gulosa e dos ritérios de seleção de olunas abordados na seção 3.2, enquanto
p
é umparâmetro perentual utilizado na análise da vizinhançada solução orrente
s
(busaloal).
Algoritmo 3.1Algoritmo BusaTabu
Entrada:
f
,h
,|V|
,|
T
|
,BT
max
,A
= [
a
ij
]m
×
n
,c
∈
R
+
,
s
,p
Saída: Limitesuperior
s
1:
s
∗
←
s
; /*solução iniial */
2:
Iter
←
0
; /* iteraçãoorrente */ 3:MelhorIter
←
0
;4:
T
← ∅
; /*lista tabu */5: enquanto Condição de parada não é satisfeitafazer
6:
Iter
←
Iter
+ 1
;7: Realizarbusaloalpara obteromelhormovimento
s
′
davizinhançadasolução
orrente,
V
(
s
)
, talques
′
não seja tabu (
s
′
∈
/
T
) ou
f
(
s
′
)
< h
(
f
(
s
))
;
8: Atualizara listatabu;
9:
s
←
s
′
; /*realiza movimento*/
10: se
f
(
s
)
< f
(
s
∗
)
então
11:
s
∗
←
s
;
12:
MelhorIter
←
Iter
;13: m se
14: Atualizara função de aspiração
h
;15: m enquanto
16:
s
←
s
∗
;
17: Retorne
s
;A BT, a ada iteração, seleiona o melhor movimento
s
→
s
′
, que não seja tabu
ou que satisfaça o ritério de aspiração. Na atualização da lista tabu, os movimentos
mais reentes são armazenadose impedidosde serem realizados durante
|
T
|
iterações,exeto seo ritériode aspiração for satisfeito,e depoissão retiradosdalistatabu.
A melhor solução
s
′
esolhida é aquela om melhor avaliação na vizinhança da
solução orrente
s
, om relação ao valorda função objetivo, à listatabu e ao ritériode aspiração. Realizamosuma busa loalna vizinhança
V
(
s
)
omo segue. A solução orrentes
é formada por um subonjunto de olunas deA
que onstitui uma soluçãoviável para o PPC. Seja
C
(
|
s
|
,
2)
o total de ombinações de pares de olunas des
dois a dois. Sejas
¯
=
N \
s
. Seleionamos aleatoriamentep
%
dos pares de olunas da solução orrentes
que são utilizados na busa por troas entre olunas des
e de¯
s
, ondep
é um parâmetro de entrada. Uma oluna des
pode ser troada por duasde
s
¯
ou duas olunas des
podem ser troadas por uma ou duas olunas des
¯
, desde que as olunas envolvidas nas possíveis troas ubram o mesmo onjunto de linhas.Após a oleta de todos os movimentos possíveis, a BT seleionaaquele que apresenta
troas que proporionem redução no usto da solução orrente
s
. Dessa forma, osmovimentos promovem uma transição entre soluções viáveis do PPC a ada iteração
daBT, embusa de um ótimoglobal.
A melhor solução obtida pela BT onstitui um limite superior para o usto da
solução ótima do PPC e é utilizado omo parâmetro de entrada para a heurístia de
otimizaçãopelosubgradienteeparaasheurístiaslagrangeanasdenidasnaspróximas
seções.
3.4 Relaxação Lagrangeana
Uma alternativa à utilização da Relaxação de Programação Linear para o PPC é a
Relaxação Lagrangeana (RL) que onsiste na dualização das restrições de igualdade
do modelo de programação inteira, inorporando-as à função objetivo através de
multipliadores de Lagrange. A solução ótima do problema de programação inteira
resultante(problemalagrangeano)forneeumlimiteinferiordovalordasoluçãoótima
doPPC. Combase nolimiteinferior enontrado enum limitesuperior onheidopara
o usto da soluçãodo problema podemos avaliarquão próximo dasolução ótima está
umasoluçãoviável disponível. De aordoom[27℄, experiênias prátiastêmindiado
queaRL forneemuito bons limites inferioresom ustoomputaionalrazoávelpara
problemas de otimização ombinatória.
Considereaformulaçãodeprogramaçãointeiradesritaem(2.1)(2.2). Assoiando
ao onjunto de restrições (2.2) multipliadores de Lagrange
λ
∈
R
m
e, em seguida,
inorporandoesse onjuntode restriçõesàfunção objetivo(2.1),obtemosaformulação
doproblema relaxado:
L
(
λ
) = min
x
∈{
0
,
1
}
n
n
X
j
=1
c
j
x
j
+
m
X
i
=1
λ
i
1
−
n
X
j
=1
a
ij
x
j
!
(3.1)
queé equivalentea
L
(
λ
) = min
x
∈{
0
,
1
}
n
n
X
j
=1
c
j
−
m
X
i
=1
λ
i
a
ij
!
x
j
+
m
X
i
=1
λ
i
(3.2)Oproblemaduallagrangeano,ujasoluçãoótimaforneeovalordosmultipliadores
de lagrangeque levamaolimite inferior máximo para o PPC, é dadopor:
max
λ
∈R
m
L(
λ
) = max
λ
∈R
m
[ min
x
∈{
0
,
1
}
n
{
c
t
x
+ (
λ
)
t
(
e
−
A
x
)
}
]
(3.3)onde
e
∈
1
m
e
c
∈
R
n
+
éo vetor ujaomponentec
j
é ousto daolunaj
.C
j
=
c
j
−
m
X
i
=1
λ
i
a
ij
,
j
= 1
, . . . , n
(3.4)A solução
x
¯
∈ {
0
,
1
}
n
doproblema lagrangeano,dado
λ
¯
∈
R
m
, para
j
= 1
, . . . , n
, é dadapor:¯
x
j
=
1
,
seC
j
≤
0
0
,
aso ontrário;(3.5)
e o valor orrespondente da solução do problema lagrangeano (limite inferior para o
PPC) édado por:
Z
LB
=
n
X
j
=1
C
j
x
¯
j
+
m
X
i
=1
¯
λ
i
(3.6)A seguir apresentamos o método de otimização pelo subgradiente, apliado para
enontrar valores numérios para osmultipliadores de Lagrange para oPPC.
3.5 Heurístia de Otimização pelo Subgradiente
Iniialmentedenimossubgradienteparaoonjuntode restriçõesdoPPC.Emseguida
abordamosomeanismo de funionamento iterativodaotimização pelo subgradiente.
3.5.1 Subgradiente
Por denição, um vetor
g
= (
g1, g2, . . . , g
m)
t
é subgradiente de L em
λ
se, para todoλ
∈
R
m
,temos que L
(
λ
)
≤
L(
λ
) + (
λ
−
λ
)
t
g
[22℄.
OonjuntodesubgradientesdeLem
λ
éumonjuntoonvexodenotadopor∇
L(
λ
)
ehamadode subdiferenial de Lemλ
. Emdeorrêniadisso, seosvetoresg
1
e
g
2
são
dois subgradientes em
λ
, então qualquer ombinação onvexa deles,θ g
1
+ (1
−
θ
)
g
2
,
para
θ
∈
[0
,
1]
, tambémé um subgradiente.Proposição 1 Para
λ
∈
R
m
, sejam
S
o onjunto de soluções do PPC eH
(
λ
) =
{
x
ˆ
∈ S |
L(
λ
) =
λ
t
e
+ (
c
t
−
λ
t
A
) ˆ
x
}
. Para todo
x
ˆ
∈
H
(
λ
)
,(
e
− A
x
ˆ
)
∈ ∇
L(
λ
)
. Logo(
e
− A
x
ˆ
)
é um subgradiente deL(
λ
)
[22℄.Demonstração:
L(
λ
) =
min{
λ
t
e
+ (
c
t
−
λ
t
A
)
x
} ≤
λ
t
e
+ (
c
t
−
λ
t
A
)
x,
∀
x
∈ {
0
,
1
}
n
.
Para um dado
λ
∈
R
n
, e em partiular para
x
ˆ
∈
H
(
λ
)
, temos que:L(
λ
)
≤
λ
t
e
+ (
c
t
−
λ
t
A
) ˆ
x
. Por denição de H(
λ
),L(
λ
) =
λ
t
e
+ (
c
t
−
λ
t
A
) ˆ
x
.
L(
λ
)
−
L(
λ
)
≤
(
λ
t
−
λ
t
)
e
−
(
λ
t
−
λ
t
)
A
x
ˆ
≤
(
λ
t
−
λ
t
) (
e
−A
x
ˆ
)
≤
(
λ
t
−
λ
t
)
g,
∀
λ
∈
R
m
.Logo
g
= (
e
− A
x
ˆ
)
onstitui um subgradiente deL(
λ
)
. Portantog
∈ ∇
L(
λ
)
.Logo, o subgradientepara ada restrição relaxada doPPC é dado por
g
i
= 1
−
n
X
j
=1
a
ij
x
j
,
i
= 1
, . . . , m
(3.7)3.5.2 Otimização pelo subgradiente
A otimização pelo subgradiente é um proesso iterativo que onsiste nadeterminação
de uma seqüênia de multipliadores de Lagrange, que se espera onvergir para um
vetor ótimo
λ
∗
∈
R
m
, solução do problema dual lagrangeano (3.3). A heurístia de
otimizaçãopelosubgradiente para oPPC é denida omo segue, segundo [10℄.
Partimos de um onjunto de multipliadores
λ
0
∈
R
m
, tal que
λ
0
= 0
. A adaiteração
t
≥
0
atualizamos osmultipliadores de Lagrangede aordo oma expressão:λ
t
+1
i
=
λ
t
i
+
tp
t
g
t
i
,
i
= 1
, ..., m
(3.8)onde
g
t
i
, ai-ésima omponentedo subgradienteg
naiteraçãot
,é dada por:g
i
t
= 1
−
n
X
j
=1
a
ij
x
¯
j
,
i
= 1
, . . . , m
(3.9)sendo
x
¯
a solução do problema lagrangeano 3.1 e 3.2.tp
t
, o tamanho do passo na
iteração
t
, é dadopor:tp
t
=
π
Z
U B
−
Z
LB
t
m
X
i
=1
(
g
t
i
)
2
(3.10)onde
0
< π
≤
2
.Z
U B
é o melhor limite superior para o problema, obtido pela busa tabu,eZ
t
LB
é o valorda soluçãodoproblema lagrangeano naiteraçãot
.Após um número máximo de iterações sem arésimo no valor do melhor limite
inferior onheido, o parâmetro
π
é reduzido pela metade. Os ritériosde parada sãoZ
U B
−
Z
LB
t
<
1
ouπ <
0
,
005
.A heurístia lagrangeana pura (HLP) onsiste em assoiar às olunas do PPC o
usto reduzido obtido nas iterações da otimização pelo subgradiente [3℄. Apliamos
a heurístia gulosa onstrutiva e a busa tabu às instânias do PPC om os ustos
modiados, para tentar enontrar soluções viáveis de melhor qualidade. Quando
a HLP obtém um limite superior inferior ao melhor limite superior orrente,
Z
U B
é atualizado. A HLP éexeutada nas iterações daotimizaçãopelosubgradiente emqueo valor da solução do problema lagrangeano é maior do que o melhor limite inferior
orrente.
3.7 Heurístia Lagrangeana de Custo Complementar
A diferençaentre aHLP e aheurístia lagrangeanade usto omplementar (HLCC) é
que aquela utiliza omo usto da oluna
j
o valorC
j
(usto reduzido), enquanto esta utiliza o valorc
j
(1
−
x
¯
j
)
, paraj
= 1
,
2
, . . . , n
, ondec
j
é o usto original da olunaj
ex
¯
j
é o valor da omponentej
na solução do problema lagrangeano [3℄. Da mesma forma que na HLP, a heurístia gulosa e a busa tabu são apliadas às instâniasdo PPC om os ustos das olunas modiados. O objetivo é utilizar informações
daestrutura da solução do problema lagrangeano, para tentar enontrar bons limites
inferiores esuperiores para as instânias do PPC. A HLCC é exeutada nas iterações
daotimizaçãopelosubgradienteemque ovalordasoluçãodoproblema lagrangeanoé
maiordo queo melhorlimite inferior orrente.
A seguir apresentamos algoritmosque ombinamas ténias disutidas nas seções
anteriorespara omporas heurístias lagrangeanaspara o PPC.
3.8 Algoritmo de Integração
Asténias de reduçãoe osmétodos heurístiosde onstruçãode soluçõesviáveispara
oPPC são apliadosonforme oalgoritmo3.2.
Iniialmente as ténias de pré-proessamento são apliadas para reduzir as
dimensões do PPC. Em seguida, apliamos os métodos heurístios de onstrução
de soluções viáveis. Avaliamos ada um dos ritérios gulosos de seleção de olunas,
desritos em 3.2.1, 3.2.2 e 3.2.3, em proedimentos distintos e utilizamos a solução
de menor usto obtida,
X
inicial
, omo parâmetro de entrada para a busa tabu, que proura obter uma nova solução viável om menor usto. O usto da melhor soluçãoviávelobtida onstituio limitesuperior
Z
U B
que éretornado peloalgoritmo3.2. A otimização pelo subgradiente, assoiada às heurístias lagrangeanas, é desritaEntrada: Matriz
A
= [
a
ij
]m
×
n
de elementos01, vetor de ustosc
∈
R
n
+
Saída: Limitesuperior
Z
U B
1: /* Pré-proessamento*/2: Apliação doproedimento paraolunas iguais
3: repetir
4: Apliaçãodos proedimentospara linhas dominantes elinhas iguais
5: Apliaçãodo proedimentopara lique de linha
6: até não haver eliminaçãode linhas ouolunas
7: /* Métodos heurístios de onstrução*/
8: Exeutar proedimentos de onstrução de soluções viáveis, a partir dos ritérios
gulosos de seleção de olunas.
X
inicial
onstitui a melhor solução enontrada om ustoc
X
9: /* BusaTabu */
10: Exeutarabusatabu quereebeasolução
X
inicial
eretornaolimitesuperiorZ
U B
obtidos, respetivamente.
t
india a iteração orrente,cont
é um ontador para aquantidade de iterações sem melhoriano valorde
Z
LB
. O valordeπ
é reduzido pela metade, quandocont
atinge o valor máximoα
, que india a quantidade limite deiterações sem melhoria no valor do melhor limite inferior orrente. Nas iterações da
otimização pelo subgradiente em que o valor da solução do problema lagrangeano é
maior do que
Z
LB
, apliamos a HLP ou a HLCC, para tentar reduzir o GAP entreZ
U B
eZ
LB
doPPC.De aordo om o algoritmo 3.3, na primeira iteração da otimização pelo
subgradiente, atribuímos ao vetor de multipliadores de Lagrange o valor
λ
= 0
. Iniialmenteo parâmetro de relaxaçãoπ
assume ovalor2
.Nas iterações da otimização pelo subgradiente, quando um dos omponentes do
vetor de multipliadores de Lagrange
λ
i
, parai
= 1
, . . . , m
, for nulo e o subgradiente orrespondente for negativo, então realizamos a projeção do valor do subgradientepara zero. Segundo [10℄ essa projeção é neessária para que o fator do subgradiente
não interra no álulo do tamanho do passo, o que favoree a onvergênia para
λ
∗
naotimização pelosubgradiente.
Os ritérios de parada adotados foram valor de
π <
0
.
005
ouZ
U B
−
Z
LB
<
1
. A seguirabordamos oesquema de Branh and Bound queadotamos para oPPC.3.9 Branh and Bound
OBranhandBound(B&B)realizaumpartiionamentoiterativodoespaçodesoluções
S
do PPC em subproblemas, talqueS
é denido peloonjunto de restriçõesA
x
= 1
e
x
∈ {
0
,
1
}
n
Entrada: Matriz
A
= [
a
ij
]m
×
n
, vetor de ustosc
∈
R
n
+
, limite superiorZ
U B
,α
. Saída: LimitesuperiorZ
U B
, limite inferiorZ
LB
.1:
t
←
0
;π
←
2
;λ
t
i
←
0
;g
t
i
←
1
,i
= 1
, . . . , m
;Z
U B
←
Z
U B
; 2:C
t
j
←
c
j
,j
= 1
, . . . , n
;Z
t
LB
←
0
;Z
LB
←
0
;tp
t
é dado pela equação (3.10);
cont
←
0
; 3: repetir4: Atualizarmultipliadores de Lagrange
λ
t
+1
i
,i
= 1
, . . . , m
, por(3.8); 5: Calularusto reduzidoC
t
+1
j
,j
= 1
, . . . , n
, por(3.4); 6: Obter soluçãox
¯
doproblema lagrangeano por (3.5); 7: Calularsubgradienteg
t
+1
i
,i
= 1
, . . . , m
,por(3.9); 8: seg
t
+1
i
<
0
eλ
t
+1
i
= 0
então9:
g
t
+1
i
←
0
; 10: m se11: Calularusto do problema lagrangeano
Z
t
+1
LB
por(3.6); 12: seZ
t
+1
LB
>Z
LB
então 13:Z
LB
←
Z
t
+1
LB
; 14:cont
←
0
;15: Exeutarheurístia lagrangeana, que retornalimite superior
Z
U B
; /*HLP ouHLCC */16: se
Z
U B
< Z
U B
então 17:Z
U B
←
Z
U B
;18: m se
19: senão
20:
cont
←
cont
+ 1
; 21: secont
=
α
então 22:π
←
π/
2
;23:
cont
←
0
;24: m se
25: m se
26: Calulartamanho do passo
tp
t
+1
por(3.10);
27:
t
←
t
+ 1
;B&B, sendo
S
R
=
{
x
∈
R
n
| A
x
= 1
,
0
≤
x
≤
1
}
oonjunto de soluções doproblema
relaxado.
O funionamento do B&B para um problema de minimização é apresentado pelo
algoritmo 3.4, onde L denota a lista de subproblemas (nós) ativos
{
NOi
}
e NO0
é o
nó raiz, ou seja, é a relaxação linear do problema inteiro original.
z
i
denota o limite inferior orrespondente ao valor da relaxação linear do subproblema NOi
.
z
ub
denota o valor da melhor solução inteira viável onheida do problema original.z
lb
denota o valor do melhor limite inferior obtido através da relaxação linear dos nós geradosnaárvore de B&B.
x
i
denota a solução da relaxação linear de NOi
. Iniialmente,
z
ub
assume o valor deZ
U B
, melhor limite superior obtido pela exeução das heurístias lagrangeanas.O algoritmo B&B é tipiamente visto omo uma árvore de busa. A árvore
é onstruída iterativamente através da formação de novos nós por um proesso de
ramiação(branhing)deumnó
k
existente, paraoqualasoluçãoótimadarelaxaçãoé fraionária. Nesse proesso dois nós lhos são formados a partir da seleção de uma
das variáveis
x
j
de valorfraionário (variável de branhing). Os nós lhos são riados a partir da xação dex
j
em 1 e em 0, respetivamente, no intuito de assegurar que o onjunto de restrições assoiado aos nós lhos dek
não inlua soluções nas quais avariávelde branhing esolhida assumao mesmo valorfraionário.
A etapa denominada poda é utilizada omo ritério para avaliar se um nó da
árvore nãoneessita serexplorado. Classiamosum nóomo fathoming nas seguintes
situações:
•
Inviabilidade: quandopelomenos umadas restriçõesdomodelode programaçãolinearé violada.
•
Bound: quando o valor da sua relaxação linear é maior ou igual ao valor damelhorsolução inteira viávelonheida (
z
ub
);•
quando o valor da relaxação linear do nó é inteiro e esse valor é inferiorz
ub
.Nesse aso, atualizamos
z
ub
para assumir o valorz
i
e removemos de L todos os subproblemasj
omz
j
≥
z
ub
.Realizamosa poda dos nós onsideradosfathoming para tentarobter a solução ótima
eprovar aotimalidade sem uma busa exaustivano espaçode soluções doproblema.
O
B
&
B
termina quando todos os nós são fathoming ou quando enontramos um nódaárvoreujasoluçãoéinteiraetemvalor(limiteinferior)igualaovalordomelhor1: /* Iniialização*/
L
← {
NO0
}
;z0
←
0
;z
lb
←
0
;z
ub
←
Z
U B
;opt
←
0
;2: /* Condiçõesde parada*/
3: enquanto
L
6
=
∅
ouopt
= 0
fazer4: Seleionar eremoverum subproblema NO
i
de L, talque
i
≥
0
; 5: Computar arelaxação linear de NOi
, ujovaloré
z
i
; 6: sez
i
> z
ub
então7: Irpara passo 3; /* poda */
8: m se
9: se
z
i
> z
lb
então 10:z
lb
←
z
i
; 11: m se12: se
x
i
for uma soluçãointeiraentão 13: sez
i
< z
ub
então14:
z
ub
←
z
i
;15: Remover de L todos ossubproblemas
j
omz
j
≥
z
ub
; /* poda */16: m se
17: se
z
ub
=
z
lb
então 18:opt
←
1
;19: m se
20: senão
21: /*Partiionamento*/
Seja
{
S
ij
}
j
=2
j
=1
um partiionamento do onjunto de restriçõesS
i
do problema
{
NOi
}
. Adiionaros problemas{
NOij
}
j
j
=2
=1
a L,seforemviáveis, onde{
NOij
}
éNO
i
om região de viabilidaderestrita a
{
S
ij
}
;
22: m se
23: m enquanto
24: se
opt
= 1
então 25:x
∗
, referente à melhorsolução inteira viável,é solução ótimaom valor
z
ub
; 26: senão se existirx
,referente àmelhor soluçãointeira viável então27: a solução
x
é retornada om valorz
ub
; 28: senão29: o problema éinviável;
branhing. Como ritério de seleção de nós adotamos o best bound, que onsiste em
esolher, entre todos os nós inexplorados de L, aquele que apresenta menor valor de
limiteinferior.
Para implementar a listade nós não exploradosL,utilizamosaestrutura de dados
heap na qual os nós am dispostos em um vetor e o nó de menor limite inferior a
situado na abeça do heap, tendo maior prioridade na seleção do próximo nó a ser
analisadopeloB&B.
A seguir abordamos os resultados omputaionais obtidos pelas estratégias de
Resultados Computaionais
Nesteapítuloabordamososresultadosomputaionaisalançadospelasestratégiasde
resolução apresentadas no apítulo anterior. Iniialmente, desrevemos as instânias
do PPC que utilizamos neste trabalho e o resultado da apliação das ténias de
pré-proessamentosobreelas. Naseção 4.3apresentamososresultados daexeuçãoda
rotina CPXmipopt da Cplex Callable Library para resolver instânias do PPC. Na
seção 4.4 desrevemos os resultados da meta-heurístia busa tabu. Na seção 4.5
apresentamos os limites superior e inferior alançados pelas heurístias lagrangeanas.
Na seção 4.6 abordamos os resultados alançados pelo Branh and Bound. Na seção
4.7 omparamos os resultados obtidos pelas heurístias lagrangeanas om resultados
existentes naliteratura.
4.1 Introdução
Asténias de pré-proessamento, asheurístias onstrutivagulosa elagrangeanase o
esquema de Branh and Bound apresentados foram implementados om a linguagem
deprogramação C++nosistemaoperaionalGNULinux. Para omputar arelaxação
linearno esquemade Branh and Bound,utilizamosoCplex [1℄. A máquinautilizada
paraarealização dostestes dosalgoritmospossui umproessador Pentium IV de3000
MHze 512 MB de memóriaRAM DDR2.
Os algoritmos implementados foram utilizados para resolver 54 instânias de
HomanePadberg[32℄paraoPPC,presentesnaOR-Library[9℄. Ovalordadensidade,
relação entre a quantidade de elementos
a
ij
= 1
e o total de elementos da matrizA
, araterístiadoPPC,variaentre0,99%e36,90%,oquemostraoquantoasinstâniasdoPPC utilizadassão espaças.
Emvirtudedelimitaçãodereursodememóriafísia,nãofomosapazesderesolver
Nas tabelas queseguem utilizamosa seguintelegenda:
instânia identiadordasinstâniasde[32℄
linhas númerodelinhasdainstâniadoPPCanterioràapliaçãodopré-proessamento
olunas númerodeolunasdainstâniadoPPCanterioràapliaçãodopré-proessamento
linhasPP númerodelinhasdainstâniadoPPCapósapliaçãodopré-proessamento
olunasPP númerodeolunasdainstâniadoPPCapósapliaçãodopré-proessamento
%linha perentualdonúmerodelinhaseliminadasnopré-proessamento
%olunas perentualdonúmerodeolunaseliminadasnopré-proessamento
pClique parâmetroutilizadonaténiadereduçãoliquedelinhas
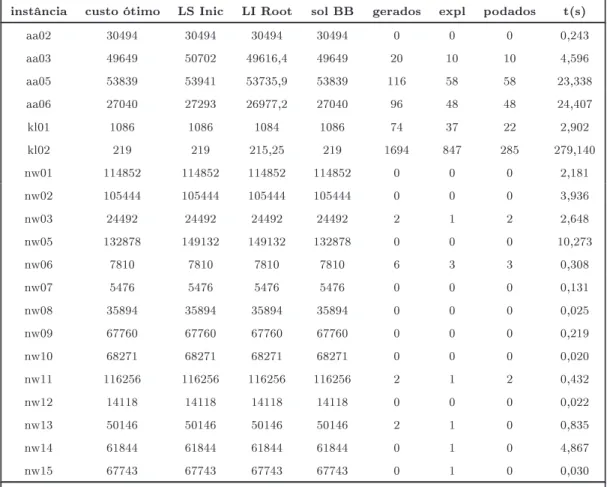
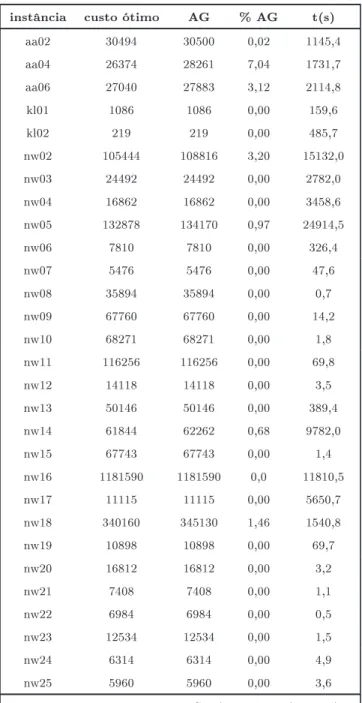
ustoótimo ustodasoluçãoótimaobtidopeloMIPCplex
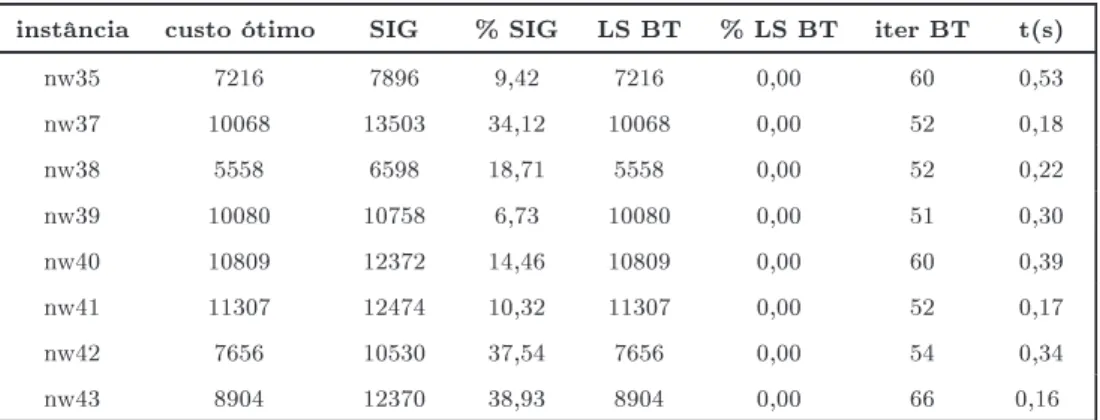
SIG valordasoluçãodaheurístiagulosaonstrutiva
%SIG diferençarelativaentreSIGeoustoótimo
LSBT limitesuperiorobtidopelabusatabu
%LSBT diferençarelativaentreLStabueoustoótimo
iterBT númerodeiteraçõesexeutadasnabusatabu
LSHL limitesuperiorobtidopelasheurístiaslagrangeanas
%LSHL diferençarelativaentreLSHLeoustoótimo
LIHL limiteinferiorobtidopelasheurístiaslagrangeanas
%LIHL diferençarelativaentreLIHLeoustoótimo
GAP diferençarelativaentreLSHLeLIHL
nIOS númerodeiteraçõesexeutadasdaotimizaçãopelosubgradiente
estimativaLS estimativadelimitesuperior
%estimativaLS diferençarelativaentreestimativaLSeoustoótimo
iterMIP númerodeiteraçõesdosimplex
nNodes númerodenósusadopararesolveroproblemainteirodoPPC
nCortes númerodeortesdeliqueadiionadosduranteaotimizaçãopeloCplex
nDesigualdades númerodedesigualdadesdeliquegeradaspeloCplex
LSIni limitesuperioriniialparaoBranhandBound
LIRoot limiteinferiorobtidonaotimizaçãodonóraizdoBranhandBound
solBB soluçãoobtidapeloBranhandBound
gerados númerodenósgeradosduranteexeuçãodoBranhandBound
expl númerodenósexploradosduranteexeuçãodoBranhandBound
inexpl númerodenósinexploradosduranteexeuçãodoBranhandBound
t(s) tempodeexeução(CPU)emsegundos
4.2 Pré-proessamento
As ténias de pré-proessamento foram apliadas onforme o algoritmo 4.1.
Iniialmente,apliamosoproedimentode eliminaçãode olunasiguaise,emseguida,
de forma iterativa, apliamos os proedimentos de linhas dominantes, linhas iguais e
Entrada: Matriz
A = [
a
ij
]m
×
n
, vetor de ustosc
∈
R
n
+
, pCliqueSaída: Matriz
A = [
a
ij
]m
×
n
om quantidademenor ouigual de linhas ede olunas 1: Apliar proedimentode olunas iguais2: repetir
3: Apliar proedimentode linhasdominantes eiguais
4: Apliar proedimentode lique de linha
5: até não haver eliminaçãode linhas ouolunas
Atabela4.1apresentaonúmero de linhasede olunasdamatriz
A
= [
a
ij
]m
×
n
das instânias do PPC antes e depois da apliação dos métodos de pré-proessamento,bem omo a perentagem de eliminação desses elementos em relação ao total. O
parâmetro de entrada pClique é determinado empiriamente para o proedimento
lique de linha (3.1.3) e india a quantidade máxima de olunas que devem obrir
umalinhapara queestasejaonsideradanoproesso de busaporolunasquepodem
sereliminadas. Deaordoomtestesexperimentaisrealizados,aapliaçãodasténias
de pré-proessamento om valorde parâmetro pClique maior que o informado resulta
namesma quantidade de linhas e de olunas eliminadas, mas pode exigir maiorusto
omputaional. O valor de pClique igual a zero india que o proedimento lique de
linhas não eliminalinhas ou olunasnas instânias onsideradas.
Osresultados omputaionais apresentados natabela4.1mostramque aapliação
dos métodos de pré-proessamento na maioria das instânias do PPC analisadas
promovem reduções signiativas no número de variáveis (olunas) e de restrições
(linhas)doproblema. Emmédia5,91%das linhase27,35%das olunassão eliminadas
naapliaçãodas ténias de pré-proessamento. Destaamos osresultados obtidosem
us02 onde houve a eliminação de 55% das linhas e em us04, onde houve redução de
84,98%das olunas.
Tabela4.1InstâniasdeHomanePadberg[32℄
instânia linhas olunas linhasPP %linhas olunasPP % olunas pClique t(s)
aa01 823 8904 617 25,03 7544 15,27 308 6,78
aa02 531 5198 362 31,83 3848 25,97 179 1,84
aa03 825 8627 553 32,97 6707 22,26 176 6,76
aa04 426 7195 343 19,48 6123 14,90 144 1,98
aa05 801 8308 533 33,46 6246 24,82 167 4,44
aa06 646 7292 504 21,98 5902 19,06 199 5,03
kl01 55 7479 47 14,54 5915 20,91 1192 1,19
kl02 71 36699 69 2,82 16542 54,93 0 0,10
nw01 135 51975 135 0,00 49903 3,99 630 1,37
nw02 145 87879 145 0,00 85256 2,98 993 2,25