.
A t´
ecnica do super-passo na
resolu¸
c˜
ao num´
erica de equa¸
c˜
oes
diferenciais parciais parab´
olicas
Aimberˆe Galdino
DISSERTAC¸ ˜AO APRESENTADA AO
INSTITUTO DE MATEM ´ATICA E ESTAT´ISTICA DA
UNIVERSIDADE DE S ˜AO PAULO PARA
OBTENC¸ ˜AO DO T´ITULO DE MESTRE EM
CIˆENCIAS
´
Area de Concentra¸c˜ao: Matem´atica Aplicada Orientador: Prof. Dr. Alexandre Megiorin Roma
Durante a elabora¸c˜ao deste trabalho o autor recebeu aux´ılio financeiro do CNPq
A T´
ecnica do Super-Passo na Resolu¸
c˜
ao
Num´
erica de Equa¸
c˜
oes Diferenciais Parciais
Parab´
olicas
Este exemplar corresponde `a reda¸c˜ao final da disserta¸c˜ao devidamente cor-rigida e defendida por Aimberˆe Galdino e aprovada pela Comiss˜ao Julgadora.
S˜ao Paulo, 2 junho de 2006.
Banca examinadora:
• Prof. Dr. Alexandre Megiorin Roma (Orientador) - IME-USP
• Prof. Dr. Clodoaldo Grotta Ragazzo - IME-USP
AGRADECIMENTOS
`
A meu orientador Prof. Dr. Alexandre Roma, pela paciˆencia e dedica¸c˜ao em me orientar durantes esses anos de pesquisa. Ao Prof. Dr. Vasilios Alexiades por estar, mesmo a distˆancia, ajudando no desenvolvimento deste trabalho.
Aos meus pais, tio Alexandre, aos meus amigos de Santana de Parna´ıba e a Lilian que sempre me apoiaram, incentivaram e ajudaram na conclus˜ao deste trabalho.
Agrade¸co a todos os colegas de p´os-gradua¸c˜ao que me ajudaram na con-clus˜ao do mestrado.
Aos professores que compuseram a banca examinadora, pela leitura cuida-dosa deste trabalho e sugest˜oes ou cr´ıticas decorrentes da mesma.
Agrade¸co ao IME-USP, em especial a Comiss˜ao de P´os-Gradua¸c˜ao pela oportunidade de realizar meus estudos nesta institui¸c˜ao.
Resumo
Abstract
Sum´
ario
Lista de Figuras iii
Lista de Tabelas v
Introdu¸c˜ao 1
1 Modelagem Matem´atica da Condu¸c˜ao do Calor 4
1.1 Equa¸c˜oes Diferenciais Parciais . . . 4
1.2 Classifica¸c˜ao . . . 5
1.3 Modelagem Matem´atica da Propaga¸c˜ao de Calor . . . 6
2 M´etodos Num´ericos Cl´assicos 11 2.1 Discretiza¸c˜ao: Diferen¸cas Finitas . . . 11
2.2 M´etodo de Euler Expl´ıcito . . . 18
2.3 M´etodo de Euler Impl´ıcito . . . 23
2.4 M´etodo de Crank-Nicolson . . . 27
3 A T´ecnica do Super-Passo 32 3.1 Condi¸c˜ao de Estabilidade . . . 35
4 Resultados Num´ericos 44
4.1 An´alise Num´erica de Convergˆencia . . . 44
4.1.1 M´etodo de Euler Expl´ıcito . . . 47
4.1.2 M´etodo de Euler Impl´ıcito . . . 47
4.1.3 M´etodo de Crank-Nicolson . . . 48
4.1.4 T´ecnica do Super-Passo . . . 49
4.2 Compara¸c˜ao de Performance . . . 51
5 Conclus˜ao 55
Apˆendice: Polinˆomios de Chebyshev 57
Lista de Figuras
1.1 Propaga¸c˜ao do calor em uma barra. . . 7
2.1 Discretiza¸c˜ao do dom´ınio Ω. . . 12
2.2 Mol´ecula computacional do M´etodo de Euler Expl´ıcito. . . 19
2.3 Mol´ecula computacional do M´etodo de Euler Impl´ıcito. . . 24
2.4 Mol´ecula computacional do M´etodo de Crank-Nicolson. . . 29
Lista de Tabelas
3.1 Aproxima¸c˜ao num´erica para o limite (3.15). . . 39 4.1 Resultados num´ericos obtidos pelo M´etodo de Euler Expl´ıcito
na aproxima¸c˜ao da solu¸c˜ao do problema (4.6). . . 47 4.2 Resultados num´ericos obtidos pelo M´etodo de Euler Impl´ıcito
na aproxima¸c˜ao da solu¸c˜ao do problema (4.6) . . . 48 4.3 Resultados num´ericos obtidos pelo M´etodo de Crank-Nicolson
na aproxima¸c˜ao da solu¸c˜ao do problema (4.6). . . 49 4.4 Resultados num´ericos obtidos pela T´ecnica do Super-Passo na
aproxima¸c˜ao da solu¸c˜ao do problema (4.6). . . 50 4.5 Erros cometidos nas aproxima¸c˜oes da solu¸c˜ao da equa¸c˜ao (4.7). 52 4.6 Compara¸c˜ao entre os pseudo-c´odigos da T´ecnica do
Introdu¸
c˜
ao
A modelagem matem´atica de problemas f´ısicos freq¨uentemente envolve a resolu¸c˜ao de equa¸c˜oes diferenciais parciais. Em particular, a condu¸c˜ao de calor num meio f´ısico pode ser modelada por uma equa¸c˜ao diferencial parcial do tipo parab´olico.
Quando n˜ao ´e poss´ıvel explicitar a solu¸c˜ao da equa¸c˜ao diferencial parcial utilizam-se m´etodos num´ericos para aproximar a solu¸c˜ao do modelo. Neste trabalho utilizaram-se m´etodos impl´ıcitos e expl´ıcitos baseados em diferen¸cas finitas. Os m´etodos expl´ıcitos restringem a escolha do passo de integra¸c˜ao no tempo ∆t em fun¸c˜ao do passo de integra¸c˜ao espacial ∆x. Essa restri¸c˜ao ´e conhecida como condi¸c˜ao de estabilidade e, em geral, os m´etodos impl´ıcitos ou n˜ao a possuem ou a apresentam de forma muito mais branda. Maiores detalhes podem ser encontrados em [3], [5], [4], [8], [14], [19], [22] e [25]. A condi¸c˜ao de estabilidade imp˜oe aos m´etodos expl´ıcitos uma maior quantidade de passos no tempo do que os m´etodos impl´ıcitos, tornando-os menos efi-cientes computacionalmente, entretanto como o tamanho do passo no tempo dos m´etodos impl´ıcitos ´e maior do que os permitidos pela condi¸c˜ao de estabil-idade dos m´etodos expl´ıcitos, os erros cometidos na aproxima¸c˜ao da solu¸c˜ao do problema proposto tamb´em s˜ao maiores. ´E uma situa¸c˜ao onde a rela¸c˜ao custo benef´ıcio deve ser analisada.
esta-Introdu¸c˜ao
bilidade. O algoritmo do Super-Passo ´e baseado no relaxamento da condi¸c˜ao de estabilidade em cada passo no tempo, para impˆo-la apenas ao final de um ciclo de N passos intermedi´arios auxiliares. O esquema aqui apresentado ´e uma varia¸c˜ao do M´etodo de Gretzsch [13]. A implementa¸c˜ao da T´ecnica do Super-Passo ´e simples; basta uma pequena modifica¸c˜ao no c´odigo que emprega o m´etodo expl´ıcito para que o tempo de processamento seja at´e da ordem de 10 vezes menor, como pode ser visto em [2], [1], [10], [18], [20], [21] e [29].
O presente trabalho mostra que a T´ecnica do Super-Passo aplicada ao M´etodo de Euler Expl´ıcito tem o tempo de processamento e erro cometido na aproxima¸c˜ao similares aos obtidos pelo M´etodo de Euler Impl´ıcito. Foram realizadas compara¸c˜oes entre os erros cometidos na aproxima¸c˜ao da solu¸c˜ao e tempo de processamento para os M´etodos de Euler Expl´ıcito, Impl´ıcito, Crank-Nicolson e Super-Passo aplicado ao M´etodo de Euler Expl´ıcito.
No primeiro cap´ıtulo ´e realizada uma introdu¸c˜ao `as equa¸c˜oes diferenciais parciais, as equa¸c˜oes s˜ao classificadas em parab´olicas, hiperb´olicas e el´ıpticas e na ´ultima se¸c˜ao do cap´ıtulo ´e deduzida, a partir fenˆomenos f´ısicos, a equa¸c˜ao do calor com condutibilidade vari´avel. Maiores detalhes sobre as equa¸c˜oes diferenciais parciais podem ser encontrados em [9], [15], [16] e [17].
O Cap´ıtulo 2 apresenta a discretiza¸c˜ao da equa¸c˜ao do calor com con-dutibilidade vari´avel utilizando diferen¸cas finitas e, para esta equa¸c˜ao s˜ao, empregados os M´etodos de Euler Expl´ıcito, Impl´ıcito e Crank-Nicolson e, para cada m´etodo num´erico, s˜ao realizados os c´alculos necess´arios para se obter as condi¸c˜oes de estabilidade e consistˆencia. Os m´etodos num´ericos ap-resentados neste cap´ıtulo podem ser encontrados com uma abordagem mais ampla em [3], [5], [4], [8], [14], [19], [22] e [25].
Introdu¸c˜ao
do calor por esta t´ecnica. A constru¸c˜ao e aplica¸c˜oes do Super-Passo podem ser encontrados em [2], [1], [10], [18], [20], [21] e [29].
No Cap´ıtulo 4 ´e feita a valida¸c˜ao dos M´etodos de Euler Expl´ıcito, Impl´ıcito, Crank-Nicolson e da T´ecnica Super-Passo por refinamento de malha e apre-senta os resultados obtidos pelos m´etodos ao aproximar a solu¸c˜ao da equa¸c˜ao do calor com condutibilidade vari´avel.
O quinto cap´ıtulo apresenta a conclus˜ao do trabalho e sugest˜oes para a continuidade do mesmo.
Cap´ıtulo 1
Modelagem Matem´
atica da
Condu¸
c˜
ao do Calor
1.1
Equa¸
c˜
oes Diferenciais Parciais
A modelagem matem´atica de problemas f´ısicos freq¨uentemente resulta na formula¸c˜ao de uma Equa¸c˜ao Diferencial Parcial (ou de um sistema de equa¸c˜oes diferenciais parciais) que ´e uma equa¸c˜ao envolvendo duas ou mais vari´aveis independentes x1, x2, . . . , xn e derivadas parciais da fun¸c˜ao u =
u(x1, x2, . . . , xn). A forma geral de uma equa¸c˜ao diferencial parcial de ordem
k ´e dada por
Ψ
µ
x1, x2, . . . , xn, u, , . . . ,
∂u ∂x1, . . . ,
∂u ∂xn,
∂2u
∂x2 1
, ∂
2u
∂x1∂x2
, . . . ,∂
ku
∂xk n
¶
= 0.
§ 1.2 Equa¸c˜oes Diferenciais Parciais-Classifica¸c˜ao
ordem com duas vari´aveis x et, tem-se
a∂
2u
∂x2 + 2b
∂2u
∂x∂t +c ∂2u
∂t2 =ϕ
µ
x, t, u,∂u ∂x,
∂u ∂t
¶
, (1.1)
onde a, be c s˜ao fun¸c˜oes de x, t, u, ux, ut, com ux =
∂u ∂x, ut=
∂u
∂t e u(x, t) a solu¸c˜ao de (1.1). Em outra nota¸c˜ao,
auxx+ 2buxt+cutt =ϕ(x, t, u, ux, ut),
onde a, be c s˜ao fun¸c˜oes de x, t, u, ux, ut, com ux =
∂u ∂x, ut=
∂u
∂t e u(x, t) a solu¸c˜ao de (1.1).
Se a ≡ b ≡ c ≡ 0 ent˜ao a equa¸c˜ao ´e de primeira ordem. Quando em (1.1) a, b e c s˜ao fun¸c˜oes de x, t e u apenas ela ´e dita quase-linear; se, adi-cionalmente, ϕ n˜ao depender de ux e ut ent˜ao ´e dita semi-linear; a equa¸c˜ao
ser´a linear se a, b, c eϕ forem fun¸c˜oes apenas dex e t. Em quaisquer outras situa¸c˜oes, a equa¸c˜ao ser´a n˜ao-linear.
Uma equa¸c˜ao diferencial parcial como em (1.1) pode possuir uma fam´ılia de solu¸c˜oes, uma solu¸c˜ao ´unica ou ainda n˜ao possuir nenhuma solu¸c˜ao.
1.2
Classifica¸
c˜
ao
Nesta Se¸c˜ao s˜ao classificadas as equa¸c˜oes diferenciais parciais quase-lineares de segunda ordem com duas vari´aveis independentes e coeficientes reais.
Considere apenas os termos com derivadas de segunda ordem de uma equa¸c˜ao diferencial parcial quase-linear, ou seja,
L(u) = a∂
2u 2 + 2b
∂2u
+c∂
2u
§ 1.3 Equa¸c˜oes Diferenciais Parciais-Modelagem
onde a, b e c s˜ao fun¸c˜oes de x, t, u, ux e ut, n˜ao simultaneamente nulos, e
u(x, t) a solu¸c˜ao de (1.1). A classifica¸c˜ao das equa¸c˜oes diferenciais parciais´e feita por analogia com a teoria das cˆonicas no plano. O estudo das curvas planas de 2o grau ´e simplificado pela redu¸c˜ao da equa¸c˜ao a sua forma normal
atrav´es de uma mudan¸ca linear de coordenadas.
Como no estudo das cˆonicas, pode-se fazer uma mudan¸ca de vari´aveis que reduz (1.2) `a sua forma canˆonica; a classifica¸c˜ao de (1.2) ´e feita analisando o sinal do discriminate b2 −ac. A mudan¸ca de vari´aveis que transforma
a equa¸c˜ao (1.2) em sua forma canˆonica ´e apresentada em [17], [16] e mais detalhadamente em [9]. Assim, o discriminante b2 −4ac define o tipo da
equa¸c˜ao diferencial parcial (1.2) em
• el´ıptica seb2−4ac < 0;
• parab´olica se b2−4ac= 0;
• hiperb´olica se b2−4ac > 0.
A equa¸c˜ao ut−µ∆u = 0 com (µ > 0) ´e do tipo parab´olico e conhecida
como equa¸c˜ao do calor e modela a condu¸c˜ao de calor em meios cont´ınuos; ∆u = 0 ´e do tipo el´ıptico e denominada equa¸c˜ao de Laplace e modela fenˆomenos estacion´arios; utt−c2uxx = 0 ´e do tipo hiperb´olico e conhecida
como equa¸c˜ao da onda e pode modelar a propaga¸c˜ao de ondas num meio cont´ınuo.
1.3
Modelagem Matem´
atica da Propaga¸
c˜
ao
de Calor
§ 1.3 Equa¸c˜oes Diferenciais Parciais-Modelagem
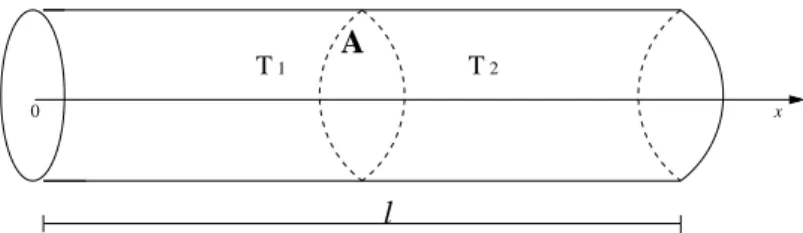
Considere uma barra de comprimento ℓ, com ´area de sec¸c˜ao A, feita de um material condutor uniforme de calor. Suponha que a superf´ıcie lateral da barra esteja isolada termicamente de modo a n˜ao permitir, atrav´es dela, transferˆencias de calor com o meio ambiente. Transferˆencias podem, entre-tanto, ocorrer atrav´es das extremidades da barra.
A uniformidade do material e o isolamento t´ermico lateral implicam que o fluxo de calor se dˆe somente na dire¸c˜ao longitudinal, e, portanto, tem-se um problema de condu¸c˜ao de calor em uma dimens˜ao apenas.
Considere que u(x, t) represente a temperatura em um ponto x desta barra no instante t, onde 0 ≤ x≤ ℓ e 0 ≤ t ≤ T. Fixados dois pontos x0 e
x0+δcom 0< δ na barra, tˆem-se as respectivas temperaturasT1 =u(x0, t) e
T2 =u(x0+δ, t) para um dado instante de tempo t. Suponha que o fluxo de
calor seja deT1 paraT2, ou seja,T1 > T2. A Figura (1.1) ilustra a propaga¸c˜ao
do calor para esta barra.
l
A
T2
T1
0 x
Figura 1.1: Propaga¸c˜ao do calor em uma barra. PelaLei de Condu¸c˜ao de Calor de Fourier, segue que
Q=µA|T2−T1| δ ,
§ 1.3 Equa¸c˜oes Diferenciais Parciais-Modelagem
Suponha que o limite lim
δ→0Q=µA|ux(x, t)| exista. Logo, o fluxo de calor
entre as sec¸c˜oes x0 e x0 +δ pode ser expresso por
q(x, t) =−µAux(x, t).
Se a condutibilidade t´ermica µfor dada em fun¸c˜ao em x, ou seja, µ=µ(x), ent˜ao o fluxo de calor entre as sec¸c˜oes ser´a dado por
q(x, t) = −Aµ(x)ux(x, t). (1.3)
Fixado um elemento da barra entre [x0 e x0 +δ] a quantidade de calor,
q, contida neste elemento da barra em um per´ıodo de tempo entret0 e t0+τ
´e expressa por
q=
Z t0+τ
t0
q(x0, t)dt−
Z t0+τ
t0
q(x0+δ, t)dt. (1.4)
Substituindo (1.3) na express˜ao (1.4) segue que
q =
Z t0+τ
t0
A[µ(x0+δ)ux(x0+δ, t)−µ(x0)ux(x0, t)]dt. (1.5)
Por outro lado, utilizando a densidade ρ(x), a quantidade de calor pode ser determinada da seguinte maneira:
Z t0+τ
t0
Z x0+τ
x0
cρ(x)Aut(x, t)dx dt, (1.6)
onde c ´e o calor espec´ıfico do material, dado em J/kgK, ou seja, Joules / kilograma Kelvin eρ(x) a densidade do material que a barra ´e feita e ´e dado em kilograma / metro c´ubico, kg/m3.
§ 1.3 Equa¸c˜oes Diferenciais Parciais-Modelagem
Z t0+τ
t0
Z x0+τ
x0
[µ(x)ux(x, t)]xdx dt=
Z t0+τ
t0
Z x0+τ
x0
ρ(x)Aut(x, t)dx dt.
Assim, segue que
cρ(x)ut(x, t) = [µ(x)ux(x, t)]x, (1.7)
onde ρ(x) e µ(x) s˜ao a densidade e a condutibilidade t´ermica da barra, re-spectivamente, e co calor espec´ıfico. Note que ρ(x), µ(x)>0,∀x∈ ℜ.
A equa¸c˜ao (1.7) ´e a equa¸c˜ao do calor com coeficientes vari´aveis para uma barra definida no dom´ınio Ω ={(x, t)∈ ℜ2/0≤x≤ℓ e 0≤t≤T}, com
ℓ,T positivos fixos.
A equa¸c˜ao (1.7), da forma que est´a definida, n˜ao garante a unicidade da solu¸c˜ao u(x, t). Para que a equa¸c˜ao possua solu¸c˜ao s˜ao necess´arias in-forma¸c˜oes adicionais sobre a fun¸c˜aou(x, t) conhecidas como condi¸c˜ao inicial e condi¸c˜oes de contorno, maiores detalhes pode ser encontrados em [9], [11], [15], [16] e [17].
Considere a equa¸c˜ao diferencial parcial do tipo parab´olico dada em (1.7) em conjunto com as seguintes condi¸c˜oes de contorno e condi¸c˜ao inicial:
ρ(x)ut(x, t) = [µ(x)ux(x, t)]x,
u(x,0) = φ(x), x∈[0, ℓ], u(0, t) =g(t), t∈[0, T], u(ℓ, t) = h(t), t∈[0, T],
(1.8)
§ 1.3 Equa¸c˜oes Diferenciais Parciais-Modelagem
teorema a seguir garante a existˆencia e unicidade da solu¸c˜ao do problema (1.8).
Teorema 1 Seja u cont´ınua em Ω¯, suas derivadas cont´ınuas em Ω. Ent˜ao
u ´e unicamente determinada em Ω¯ pelos valores de u em ∂Ω.
No Teorema 1 ¯Ω representa o interior do conjunto Ω, e∂Ω a sua fronteira, a demosntra¸c˜ao deste teorema encontra-se em [17] e [9].
Cap´ıtulo 2
M´
etodos Num´
ericos Cl´
assicos
Neste Cap´ıtulo s˜ao apresentados os m´etodos de Euler Expl´ıcito, Impl´ıcito e Crank-Nicolson. A condi¸c˜ao de estabilidade para cada m´etodo tamb´em ´e determinada e mostra-se que os m´etodos num´ericos obtidos s˜ao consistentes
com a equa¸c˜ao diferencial parcial do tipo parab´olico em (1.7) com densidade constante. Por simplicidade, tomar-se-´a c= 1 eρ(x)≡1, para todox, e um termo for¸cante f(x, t) de classe C∞.
2.1
Discretiza¸
c˜
ao: Diferen¸
cas Finitas
Considere o seguinte problema de Dirichilet
ut(x, t)−[µ(x)ux(x, t)]x =f(x, t),
u(x,0) =φ(x) x∈[0, L], u(0, t) =g(t) t∈[0, T], u(L, t) =h(t) t∈[0, T],
(2.1)
§ 2.1 M´etodos Num´ericos-Discretiza¸c˜ao
O intervalo [0, L], da vari´avel espacial x, ´e dividido em N partes iguais de comprimento ∆x, obtendo-se N + 1 pontos xn = n∆x, n = 0,1, . . . , N,
onde ∆x = NL. O instante de tempo final T do intervalo [0, T] da vari´avel temporal t ´e dividido pelo passo de integra¸c˜ao no tempo ∆t, determinado respeitando (quando existe) a condi¸c˜ao de estabilidade do m´etodo num´erico, obtendo-se a quantidade de passos no tempo M, ou seja, tem-se M + 1 pontos tm =m∆t, m = 0,1, . . . , M. Assim, procura-se aproximar a solu¸c˜ao
da equa¸c˜ao diferencial nos pontos da malha (xn, tm), ilustrada na Figura
(2.1).
✁
✂✄
☎✆
✝✞
✟✠ ✡☛ ☞✌
0
T
L
t
x
n+1 n n−1
(x ,t )n m m+1
m
m−1
Figura 2.1: Discretiza¸c˜ao do dom´ınio Ω.
O valor da solu¸c˜ao exata no ponto (xn, tm) ser´a representado por umn e a
aproxima¸c˜ao obtida por um m´etodo num´erico por Um n .
O problema (2.1) ´e discretizado utilizandodiferen¸cas finitas, ou seja, para aproximar a derivada de 1a ordem de u(x, t) em rela¸c˜ao a t utilizam-se as
seguintes aproxima¸c˜oes:
ut(x, t)≈
u(x, t+ ∆t)−u(x, t)
∆t (F´ormula Progressiva), (2.2) ut(x, t)≈
u(x, t)−u(x, t−∆t)
§ 2.1 M´etodos Num´ericos-Discretiza¸c˜ao
utiliza-se a seguinte aproxima¸c˜ao:
utt(x, t)≈
u(x, t−∆t)−2u(x, t) +u(x, t+ ∆t)
∆t2 . (2.4)
As aproxima¸c˜oes acima s˜ao oriundas da manipula¸c˜ao alg´ebrica da ex-pans˜ao em S´erie de Taylor da fun¸c˜ao u em (x, t+ ∆t):
u(x, t±∆t) =u±∆t∂u ∂t +
∆x2 2!
∂2u ∂t2 ±
∆x3 6!
∂3u
∂t3 +O(∆t
4). (2.5)
Por interm´edio da manipula¸c˜ao alg´ebrica das aproxima¸c˜oes (2.2), (2.3) e (2.4) ´e poss´ıvel construir os M´etodos de Euler Expl´ıcito, Euler Impl´ıcito e Crank-Nicolson, essas constru¸c˜oes s˜ao detalhadas em [3], [4], [5] e [8].
Considere uma equa¸c˜ao diferencial parcial de segunda ordem definida no dom´ınio Ω.
P(u) = f(x, t, u, ut, ux) (2.6)
onde P(u) ´e dada por,
P(u) = a(x, t)uxx+b(x, t)uxt+c(x, t)utt+d(x, t)ut+e(x, t)ux,
com a, b, c, d, e, ue suas derivadas cont´ınuas em Ω. Um m´etodo de diferen¸cas finitas com passo de integra¸c˜ao no tempo ∆te passo de integra¸c˜ao no espa¸co ∆xpara (2.6) ´e denotado por P∆(U), as defini¸c˜oes a seguir s˜ao discutidadas
em [25].
Defini¸c˜ao 1 Um m´etodo de diferen¸cas finitas P∆Unm = 0 para uma equa¸c˜ao
§ 2.1 M´etodos Num´ericos-Discretiza¸c˜ao
∆x
∞
X
j=−∞
|Unm|
2
≤CT∆x J
X
j=0
∞
X
i=−∞
¯ ¯Uij
¯ ¯
2
, (2.7)
para 0≤m∆t≤T, com (∆x,∆t)∈Λ.
A estabilidade ´e uma condi¸c˜ao necess´aria para a convergˆencia do m´etodo num´erico, uma das formas funcionais de se determinar a condi¸c˜ao de estabil-idade de um m´etodo num´erico de passo ´unico no tempo ´e a An´alise de Von Neumann, que ´e ilustrada a seguir e, detalhada em [25].
An´alise de Von Neumann
Uma importante aplica¸c˜ao dasTransformadas de Fourier ´e aAn´alise de Von Neumann para a determina¸c˜ao da condi¸c˜ao de estabilidade de m´etodos num´ericos baseados em diferen¸cas finitas. As Transformadas de Fourier fornecem condi¸c˜oes suficientes e necess´arias para a estabilidade dos m´etodos de diferen¸cas finitas.
POr interm´edio daTransformada de Fourier a determina¸c˜ao da condi¸c˜ao de estabilidade de um m´etodo de diferen¸cas ´e reduzido a manipula¸c˜oes alg´ebricas. Considere a equa¸c˜aou(x, t)t=−µu(x, t)x, com 0< aeu(x, t)∈C2(Ω), onde
Ω ´e o dom´ınio da fun¸c˜ao u(x, t), e o m´etodo de diferen¸cas dado a seguir: Um+1
n −Unm
∆t =−µ
Um
n −Unm−1
∆x , (2.8)
que pode ser reescrito como
Unm+1 =
µ
1−µ∆t ∆x
¶
Unm+µ∆t ∆xU
m
n−1. (2.9)
Aplicando a Transformada Inversa de Fourier para Um
n, tem-se
Unm = √1 2π
Z π/∆x
−π/∆x
§ 2.1 M´etodos Num´ericos-Discretiza¸c˜ao
substituindo em (2.9) para Um
n eUnm−1, obt´em-se
Unm+1 = √1
2π
Z π/∆x
−π/∆x
ein∆xξ
·µ
1−µ∆t ∆x
¶
+µ∆t ∆xe
−i∆xξ
¸
ˆ
Um(ξ)dξ. (2.10)
Comparando a express˜ao (2.10) com a transformada Inversa de Fourier
Unm+1 = √1 2π
Z π/∆x
−π/∆x
ein∆xξUˆm+1(ξ)dξ,
e usando o fato que a Transformada de Fourier ´e ´unica, segue que o integrando de (2.10) ´e igual ao da Transforma Inversa de Fourier, assim tem-se que
ˆ
Um+1(ξ) =
·µ
1−µ∆t ∆x
¶
+µ∆t ∆xe
i∆xξ
¸
ˆ
Um(ξ) =g(∆xξ) ˆUm(ξ), (2.11)
onde
g(∆xξ) =
µ
1−µ∆t ∆x
¶
+µ∆t ∆xe
i∆xξ.
A express˜ao2.11 mostra que realizar um passo de integra¸c˜ao no tempo do m´etodo num´erico ´e equivalente a multiplicar a Transformada de Fourier da solu¸c˜ao pelo fator de amplifica¸c˜ao g(∆xξ). Assim, obt´em-se a rela¸c˜ao
ˆ
Um(ξ) = gm(∆xξ) ˆU0(ξ). (2.12)
§ 2.1 M´etodos Num´ericos-Discretiza¸c˜ao
∆x
∞
X
j=−∞
¯ ¯Ujm
¯ ¯
2
=
Z π/∆x
−π/∆x
¯ ¯ ¯Uˆ
m(ξ)¯¯ ¯
2
dξ
=
Z π/∆x
−π/∆x|
g(∆xξ)|2m¯¯ ¯Uˆ
0(ξ)¯¯ ¯
2
dξ.
A desigualdade em (2.7) ser´a satisfeita, com J = 0, se |g(∆xξ)|2m for apropriadamente limitada. Considereθ = ∆xξ, ent˜ao o fator de amplifica¸c˜ao para o m´etodo (2.8) ´e dado por
|g(θ)|2 =
¯ ¯ ¯ ¯
µ
1−µ∆t ∆x
¶
+µ∆t ∆xe −iθ ¯ ¯ ¯ ¯ = µ
1−µ∆t ∆x +µ
∆t
∆xcos (θ)
¶2
+µ2
µ
∆t ∆x
¶2
sin2(θ)
=
µ
1−2µ∆t ∆xsin 2 µ θ 2 ¶¶2
+ 4µ2
µ ∆t ∆x ¶2 sin2 µ θ 2 ¶ cos2 µ θ 2 ¶
=1−4µ∆t ∆xsin 2 µ θ 2 ¶
+ 4µ2
µ ∆t ∆x ¶2 sin4 µ θ 2 ¶
+ 4µ2
µ ∆t ∆x ¶2 sin2 µ θ 2 ¶ cos2 µ θ 2 ¶
=1−4µ∆t ∆x
µ
1−µ∆t ∆x ¶ sin2 µ θ 2 ¶ .
Note que|g(θ)|´e limitado por 1 se 0≤µ∆t
∆x ≤1. Assim, por (2.12), segue
que
∆x
∞
X
j=−∞
¯ ¯Ujm
¯ ¯
2
≤
Z π/∆x
−π/∆x
¯ ¯ ¯Uˆ
0(ξ)¯¯ ¯
2
dξ= ∆x
∞
X
j=−∞
¯ ¯Uj0
¯ ¯
2
.
Pela defini¸c˜ao (2.7) o m´etodo ´e est´avel. Entretanto, se o n´umeroµ∆∆xt n˜ao estiver fixado entre 0 e 1, quando ∆xe ∆ttenderem a zero, ent˜ao|g(θ)|ser´a maior do que 1 para alguns valores de θ, e o m´etodo ser´a inst´avel.
§ 2.1 M´etodos Num´ericos-Discretiza¸c˜ao
Teorema 2 Um m´etodo de diferen¸cas finitas de passo ´unico (com coefi-cientes constantes) ´e est´avel, se e somente se, existir uma constante K (independente de θ, ∆x e ∆t) e alguns passos de integra¸c˜ao ∆t0 e ∆x0 tais
que
|g(θ,∆x,∆t)| ≤1 +K∆t, (2.13)
para todo θ, 0<∆t≤∆t0, e 0<∆x≤∆x0.
Se g(θ,∆x,∆t) for independente de ∆x e ∆t, a condi¸c˜ao de estabilidade (2.13) pode ser substitu´ıda por
|g(θ)| ≤1.
Este teorema mostra que para se determinar a condi¸c˜ao de estabilidade de um m´etodo de diferen¸cas finitas considera-se apenas o fator de amplifica¸c˜ao g(∆xξ) oriundo da an´alise de Von Neumann, este teorema, e as defini¸c˜oes 2 e 3 s˜ao discutidas em [25].
Defini¸c˜ao 2 Dada uma equa¸c˜ao diferencial parcialP(u)definida num dom´ınio
Ω e um m´etodo de diferen¸cas finitas, P∆(U), com passos de integra¸c˜ao no
tempo e espa¸co dados por ∆t e ∆x. O m´etodo de diferen¸cas finitas ´e dito consistente com a equa¸c˜ao diferencial parcial se para qualquer fun¸c˜ao suave
φ(x, t)
|P φ(x, t)−P∆φ(x, t)| →0 quando ∆x,∆t →0, ∀(x, t)∈Ω
A consistˆencia ´e uma condi¸c˜ao necess´aria para a convergˆencia do m´etodo num´erico, pois, garante que o m´etodo de diferen¸cas finitas aproxima a equa¸c˜ao diferencial quando os passos de integra¸c˜ao no tempo tendem a zero.
§ 2.2 M´etodos Num´ericos-Euler Expl´ıcito
u(x, t), da equa¸c˜ao diferencial eUm
n a aproxima¸c˜ao gerada pelo m´etodo num´erico,
tais que,
Un0 −→u(x,0), quando n∆x−→x,
ent˜ao
Unm −→u(x, t), quando (n∆x, m∆t)−→(x, t),
com
∆x,∆t−→0.
O Teorema de Lax-Richtmyer enuncia um resultado necess´ario e suficiente para a convergˆencia de m´etodos de diferen¸cas finitas.
Teorema 3 Teorema de equivalˆencia de Lax-RichtmyerUm m´etodo consistente de diferen¸cas finitas para uma equa¸c˜ao diferencial parcial ´e con-vergente se e somente se o m´etodo for est´avel.
O Teorema de equivalˆencia de Lax ´e demostrado em [25], as defini¸c˜oes acima s˜ao encontradas em [8], [25].
2.2
M´
etodo de Euler Expl´ıcito
Na discretiza¸c˜ao da equa¸c˜ao (2.1) utilizou-se a seguinte aproxima¸c˜ao para a derivada de primeira ordem no espa¸co:
ux(xn, tm)≃
um n+1
2 −
um n−12
∆x ,
onde um n+1
2
=u(xn+1 2, tm).
§ 2.2 M´etodos Num´ericos-Euler Expl´ıcito
no tempo (2.2) obt´em-se: Um+1
n −Unm
∆t −
µn+1 2(U
m
n+1−Unm)−µn−1 2(U
m
n −Unm−1)
∆x2 =f
m
n , (2.14)
ou seja,
Unm+1 =Unm+
∆t ∆x2
h
µn+1 2(U
m
n+1−Unm)−µn−12(U
m
n −Unm−1)
i
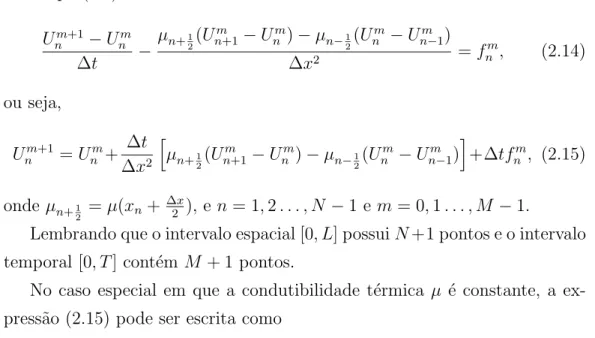
+∆tfnm, (2.15)
onde µn+1
2 =µ(xn+
∆x
2 ), e n= 1,2. . . , N −1 e m= 0,1. . . , M −1.
Lembrando que o intervalo espacial [0, L] possuiN+1 pontos e o intervalo temporal [0, T] cont´em M + 1 pontos.
No caso especial em que a condutibilidade t´ermica µ ´e constante, a ex-press˜ao (2.15) pode ser escrita como
Unm+1 =Unm+µ ∆t ∆x2
¡
Unm+1−2Unm+Unm−1¢
+ ∆tfnm, (2.16) com n = 1,2. . . , N−1 e m = 0,1. . . , M −1.
A Figura (2.2) ilustra a mol´ecula computacional da f´ormula (2.16) que ´e conhecida como M´etodo de Euler Expl´ıcito.
∆
x∆
tn−1,m n,m n+1,m
n,m+1
§ 2.2 M´etodos Num´ericos-Euler Expl´ıcito
´e necess´ario conhecer os valores Um
n−1, Unm e Unm+1 para que a aproxima¸c˜ao
Um+1
n possa ser calculada, a constru¸c˜ao deste m´etodo num´erico pode ser
encontrada em [3], [4], [5] e [8].
Condi¸c˜ao de Estabilidade do M´etodo de Euler Expl´ıcito
Considere o problema proposto em (2.1), com o dom´ınio discretizado e o M´etodo de Euler Expl´ıcito descrito em (2.16) e suponha que f(x, t)≡0.
No Crit´erio de Von Neumann, para determinar estabilidade do esquema, examina-se a propaga¸c˜ao do erro global, tendo em vista que ele ´e a soma de erros mais simples chamados de harmˆonicos. O processo ´e inspirado na expans˜ao de uma fun¸c˜ao em s´erie de Fourier. Substitui-se um
n por gmeinθ em
(2.16), e adotando µM = max
0≤x≤L{µ(x)}, tem-se:
gm+1einθ =gmeinθ+ ∆t ∆x2µM
¡
gmei(n+1)θ−2gm+1einθ+gmei(n−1)θ¢
⇒
ggmeinθ =gmeinθ+ ∆t ∆x2µM
¡
gmeinθeiθ−2gmeinθ+gmeinθe−iθ¢
,
logo,
g = 1 + ∆t ∆x2µM
¡
eiθ −2 +e−iθ¢
,
utilizando a identidadeea+bi=ea(cos (b)+isin (b)) na express˜ao acima segue
que:
g = 1 + ∆t
∆x2µM(2 cos (θ)−2) = 1 + 2
∆t
∆x2µM (cos (θ)−1),
pela seguinte rela¸c˜ao trigonom´etrica cos (x) = 1−2 sin2¡x
2
¢
tem-se
g = 1−4 ∆t
∆x2µM sin 2
µ
θ 2
¶
§ 2.2 M´etodos Num´ericos-Euler Expl´ıcito
Para que o m´etodo seja est´avel ´e necess´ario que haja amortecimento do erro, ou seja |g| ≤1.
Assim,
−1≤1−4 ∆t
∆x2µMsin 2 µ θ 2 ¶ ≤1, donde, ´e necess´ario que
−1≤1−4 ∆t
∆x2µMsin 2 µ θ 2 ¶ ⇒
2≥4 ∆t
∆x2µMsin 2 µ θ 2 ¶ ⇒ 1 2 ≥ ∆t
∆x2µM sin 2
µ
θ 2
¶
Portanto, para que o M´etodo de Euler Expl´ıcito seja est´avel ´e necess´ario que os parˆametros ∆x e ∆t atendam a seguinte condi¸c˜ao de estabilidade:
∆t ∆x2 ≤
1 2µM
,
onde µM = max
0≤x≤L{µ(x)}.
Note que esta restri¸c˜ao para o tamanho do passo na dire¸c˜ao t pode ser interpretada como ∆t < ∆x2
2µM, assim, se a aproxima¸c˜ao for feita para um valor
de T grande, o esfor¸co computacional tamb´em ser´a alto.
Consistˆencia do M´etodo de Euler Expl´ıcito
Suponha que u(x, t) seja uma fun¸c˜ao suficientemente suave, P u(x, t) a equa¸c˜ao diferencial em (2.1) eP∆ua equa¸c˜ao diferencial em (2.1) discretizada
com o M´etodo Euler Expl´ıcito, com um
n = u(xn, tm) e µM = max
0≤x≤L{µ(x)},
ent˜ao:
P∆u=
um+1
n −umn
∆t −µM um
n−1−2umn +umn+1
§ 2.2 M´etodos Num´ericos-Euler Expl´ıcito
Aplicando as expans˜oes em s´erie de Taylor (2.5) acima obt´em-se:
Pδu =
um
n + ∆tut+ 12∆t2utt+O(∆t3)−umn
∆t −µM
um
n−1−2umn +umn+1
∆x2 ,
= ∆tut+O(∆t
2)
∆t −µM
∆x2u
xx+O(∆x3)
∆x2 ,
= ut+O(∆t)−µM (uxx+O(∆x)),
logo
P∆u=ut+O(∆t)−µM(uxx+O(∆x)),
onde as derivadas s˜ao calculadas no ponto (xn, tm), ou seja, ut=ut(xn, tm).
Considerando a diferen¸ca entre P u e P∆u tem-se,
P u−P∆u=ut−µMuxx−ut+O(∆t) +µM(uxx+O(∆x)),
P u−P∆u=O(∆t) +µMO(∆x).
Assim
lim
∆t→0 ∆x→0
P u−P∆u= lim ∆t→0 ∆x→0
O(∆t) +µMO(∆x) = 0.
Portanto, o M´etodo de Euler Expl´ıcito ´e consistente com a equa¸c˜ao diferen-cial.
§ 2.3 M´etodos Num´ericos-Euler Impl´ıcito
2.3
M´
etodo de Euler Impl´ıcito
A discretiza¸c˜ao de (2.1) foi realizada utilizando-se a seguinte aproxima¸c˜ao para aderivada de primeira ordem,
ux(xn, tm)≃
um n+1
2 −
um n−12
∆x ,
onde um n+1
2
=u(xn+1 2, tm).
Aplicando na parte espacial da equa¸c˜ao (2.1) e aproximando a derivada de primeira ordem no tempo por diferen¸cas regressivas no tempo obt´em-se,
Um+1
n −Unm
∆t −
µn+1 2(U
m+1
n+1 −Unm+1)−µn−12(U
m+1
n −Unm−+11 )
∆x2 =f
m+1
n , (2.17)
agrupando as parcelas calculadas no mesmo instante de tempo tem-se
−∆x∆t2µn+1 2U
m+1
n+1 +
µ
1 + ∆t ∆x2
³
µn+1
2 +µn− 1 2
´¶
Unm+1− ∆t
∆x2µn−12U
m+1
n−1 =Unm+∆tfnm+1,
(2.18) onde µn+1
2 =µ(xn+
∆x
2 ), comn = 1,2, . . . , N −1 e m = 0,1, . . . , M −1.
O m´etodo descrito em (2.18) ´e chamado M´etodo de Euler Impl´ıcito.
No caso em queµ(x) for uma fun¸c˜ao constante, a express˜ao (2.18) resume-se a
−ωUnm+1+1+ (1 + 2ω)Unm+1−ωUnm−+11 =Unm+ ∆tfnm+1, (2.19)
onde ω =µ∆∆xt2.
§ 2.3 M´etodos Num´ericos-Euler Impl´ıcito
a resolu¸c˜ao do seguinte sistema linear:
AUm+1 =Um+Cm+1+Fm+1, m= 0,1, . . . , M −1,
onde: A=
1 + 2ω −ω 0 . . . 0 0 −ω 1 + 2ω −ω . . . 0
... ...
0 . . . 0 −ω 1 + 2ω
, Um =
Um 1 Um 2 ... Um
N−2
Um N−1
,
Cm+1 =ω
U0m+1 0 ... 0 UNm+1
, Fm+1 = ∆t
f1m+1 fm+1
2
... fNm−+12 fNm−+11
,
A mol´ecula computacional do M´etodo de Euler Impl´ıcito ´e ilustrada na Figura (2.3).
∆
x∆
t n,m+1 n−1,m+1 n+1,m+1 n,m§ 2.3 M´etodos Num´ericos-Euler Impl´ıcito
seja, ´e necess´ario conhecer os valores Unm−+11 , Um
n e Unm+1+1 para que a
aprox-ima¸c˜aoUm+1
n possa ser calculada, a constru¸c˜ao do M´etodo de Euler Impl´ıcito
pode ser encontrada em [3], [4], [5] e [8].
Condi¸c˜ao de Estabilidade do M´etodo de Euler Impl´ıcito
Considere o problema proposto em (2.1), com dom´ınio discretizado e o M´etodo de Euler Impl´ıcito descrito em (2.18). Considerando f(x, t) ≡ 0 e µM = max
0≤x≤L{µ(x)}, substitui-seu m
n por gmeinθ em (2.19), obtendo-se:
− ∆t
∆x2µMg
m+1ei(n+1)θ+
µ
1 + 2 ∆t ∆x2µM
¶
gm+1einθ− ∆t ∆x2µMg
m+1ei(n−1)θ =gmeinθ
⇒
− ∆t
∆x2µMgg
meinθeiθ+
µ
1 + 2 ∆t ∆x2µM
¶
ggmeinθ − ∆t ∆x2µMgg
meinθe−iθ =gmeinθ,
e, portanto,
−∆x∆t2µMge
iθ+
µ
1 + 2 ∆t ∆x2µM
¶
g− ∆t
∆x2µMge−
iθ = 1
Utilizando novamente a identidadeea+bi=ea(cos (b)+isin (b)), segue que
−2 ∆t
∆x2µMgcos (θ) +
µ
1 + 2 ∆t ∆x2µM
¶
g =1⇒ g
µ
2 ∆t
∆x2µM(1−cos (θ)) + 1
¶
=1.
Aplicando a rela¸c˜ao trigonom´etrica cos(x) = 1 − 2 sin2¡x
2 ¢ na express˜ao acima, tem-se g µ 4 ∆t
∆x2µMsin 2 µ θ 2 ¶¶ = 1. Logo,
g = 1
§ 2.3 M´etodos Num´ericos-Euler Impl´ıcito
e segue que
|g|<1 ∀θ.
Portanto, o M´etodo de Euler Impl´ıcito ´e incondicionalmente est´avel, ou seja, independentemente do tamanho do passo de integra¸c˜ao no tempo o M´etodo de Euler Impl´ıcito n˜ao amplifica os erros cometidos na aproxima¸c˜ao num´erica da solu¸c˜ao do equa¸c˜ao diferencial.
Consistˆencia do M´etodo de Euler Impl´ıcito
Suponha que u(x, t) seja uma fun¸c˜ao suficientemente suave, P u(x, t) a equa¸c˜ao diferencial e P∆u o M´etodo Euler impl´ıcito, com umn = u(xn, tm) e
µM = max
0≤x≤L{µ(x)}, ent˜ao
P∆u=
um
n −umn−1
∆t −µM um
n−1−2umn +umn+1
∆x2 . (2.20)
Substituindo um+1
n , umn−1 e umn+1 pelas suas expans˜oes em s´erie de Taylor na
equa¸c˜ao (2.20) tem-se
P∆u =
um
n −umn + ∆tut+O(∆t2)
∆t −µM
−∆xux+∆x
2
2 uxx+ ∆xux+ ∆x2
2 uxx+O(∆x 3)
∆x2
= ut+O(∆t)−µM(uxx +O(∆x)),
logo,
P∆u=ut−µMuxx+O(∆t) +O(∆x),
onde as derivadas s˜ao calculadas no ponto (xn, tm), ou seja, ut=ut(xn, tm).
Considerando a diferen¸ca entre P ue P∆u tem-se
§ 2.4 M´etodos Num´ericos - Crank-Nicolson
assim,
P u−P∆u=O(∆t) +O(∆x),
segue que,
lim
∆t→0 ∆x→0
P u−P∆u= lim ∆t→0 ∆x→0
O(∆t) +O(∆x) = 0.
Portanto, o M´etodo de Euler Impl´ıcito ´e consistente com a equa¸c˜ao diferencial parcial. Pelos resultados obtidos em (2.3) o M´etodo de Euler Impl´ıcito ´e convergente.
2.4
M´
etodo de Crank-Nicolson
O M´etodo de Crank-Nicolson pode ser obtido tomando-se a m´edia entre os m´etodos de Euler Expl´ıcito e Impl´ıcito. Assim, pelas express˜oes em (2.14) e (2.17), o M´etodo de Crank-Nicolson ´e dado por:
Um+1
n −Unm
∆t =
µn+1 2
¡
Unm+1+1+Um
n+1−Unm+1−Unm
¢
2∆x2 +
fm+1
n
2
−µi− 1 2
¡
Um+1
n +Unm−Unm−1−Unm−+11
¢
2∆x2 +
fm n
2 ,
(2.21)
com µn+1
2 =µ(xn+
∆x
2 ), comn = 1,2, . . . , N −1 e m = 0,1, . . . , M −1,
ou ainda,
−2∆x∆t2µn−1 2U
m+1
n−1 +
µ
1 + ∆t 2∆x2
³
µn+1
2 +µn− 1 2
´¶
Unm+1− ∆t
2∆x2µn+12U
m+1
n+1 =
∆t
2∆x2µn−12U
m n−1+
µ
1− ∆t 2∆x2
³
µn+1
2 −µn− 1 2
´¶
Unm+ ∆t
2∆x2µn+12U
m
n+1+ ∆tf ,¯
(2.22)
onde ¯f = f
m+1
n +fnm
§ 2.4 M´etodos Num´ericos - Crank-Nicolson
Se µ(x) for um fun¸c˜ao constante constante ent˜ao a express˜ao (2.22) pode ser escrita como:
−ωUnm−+11 + 2(1 +ω)Unm+1−ωUnm+1+1 =ωUnm−1+ 2(1−ω)Unm+ωUnm+1+ ∆tf ,¯ (2.23) com ω =µ ∆t
∆x2, n = 1,2, . . . , N −1 e m= 0,1, . . . , M −1.
Note que, para obter a aproxima¸c˜ao da solu¸c˜ao no instantetm+1, ´e necess´aria
a resolu¸c˜ao do seguinte sistema linear:
AUm+1 =BUm+Cm+1+Fm, com m= 0,1, . . . , M −1.
onde, A=
1 +ω −ω
2 0 . . . 0
0 −ω2 1 +ω −ω2 . . . 0
... ...
0 . . . 0 −ω2 1 +ω
, Um+1 =
U1m+1 U2m+1
... UNm−+12 UNm−+11
, B =
1−ω ω2 0 . . . 0 0 ω2 1−ω ω2 . . . 0
... ...
0 . . . 0 ω
2 1−ω
, Cm+1 =
ω 2 Um
0 +U0m+1
0 ... 0 Um
N +UNm+1
§ 2.4 M´etodos Num´ericos - Crank-Nicolson
e Fm =
∆t 2
fm
1 +f1m+1
fm
1 +f1m+1
... fm
N−2+fNm−+12
fm
N−1+fNm−+11
O m´etodo descrito em (2.22) ´e chamadoM´etodo de Crank-Nicolson, e sua m´olecula computacional ´e ilustrada na Figura (2.4).
∆
x∆
t n,m+1n−1,m+1 n+1,m+1
n+1,m n,m
n−1,m
Figura 2.4: Mol´ecula computacional do M´etodo de Crank-Nicolson. A Figura (2.4) ilustra a dependˆencia que a aproxima¸c˜ao obtida no ponto (xn, tm+1) em rela¸c˜ao aos pontos (xn−1, tm+1), (xn+1, tm+1), (xn−1, tm), (xn, tm)
e (xn+1, tm), ou seja, ´e necess´ario conhecer-se os valores U−m1+1, Unm+1+1, Unm−1,
Um
n e Unm+1 para que a aproxima¸c˜ao Unm+1 possa ser calculada, a constru¸c˜ao
deste m´etodo num´erico ´e discutida em [3], [4], [5] e [8].
Condi¸c˜ao de Estabilidade do M´etodo de Crank-Nicolson
De maneira an´aloga a feita aos outros m´etodos faz-se a substitui¸c˜aoum n =
gmeinθ na express˜ao (2.23), adotandoω = ∆t
∆x2µM, onde µM = max
0≤x≤L{µ(x)},
§ 2.4 M´etodos Num´ericos - Crank-Nicolson
−∆x∆t2µMg
m+1ei(n−1)θ+ 2
µ
1 + ∆t ∆x2µM
¶
gm+1einθ− ∆t ∆x2µMg
m+1ei(n+1)θ =
= ∆t ∆x2µMg
mei(n−1)θ+ 2
µ
1− ∆t ∆x2µM
¶
gmeinθ+ ∆t ∆x2µMg
mei(n+1)θ.
Agrupando os termos semelhantes,
−∆x∆t2µMggmeinθe−θ+ 2
µ
1 + ∆t ∆x2µM
¶
ggmeinθ− ∆t ∆x2µMgg
meinθeiθ =
= ∆t ∆x2µMg
meinθe−iθ+ 2
µ
1− ∆t ∆x2µM
¶
gmeinθ+ ∆t ∆x2µMg
meinθeiθ.
Logo,
−∆x∆t2µMg
¡
e−iθ+geiθ¢
+ 2
µ
1 + ∆t ∆x2µM
¶
g = ∆t ∆x2µM
¡
e−iθ+eiθ¢
+ 2
µ
1− ∆t ∆x2µM
¶
Lembrando que ea+bi =ea(cos (b) +isin (b)), tem-se
−2 ∆t
∆x2µMgcos (θ) + 2
µ
1 + ∆t ∆x2µM
¶
g =2 ∆t
∆x2µMcos (θ) + 2
µ
1− ∆t ∆x2µM
¶
⇒
g
µ
1 + ∆t
∆x2µM(1−cos (θ))
¶
= ∆t
∆x2µM(cos (θ)−1) + 1
e utilizando a rela¸c˜ao trigonom´etrica cos (x)−1 = −2 sin2¡x
2
¢
, tem-se
g
µ
1 + 2 ∆t
∆x2µMsin 2
µ
θ 2
¶¶
= 1−2 ∆t
∆x2µM sin 2 µ θ 2 ¶ , logo
g = 1−2
∆t
∆x2µMsin
2¡θ
2
¢
1 + 2 ∆t
∆x2µMsin
2¡θ
2
¢ <1, ∀ θ.
§ 2.4 M´etodos Num´ericos - Crank-Nicolson
Consistˆencia do M´etodo de Crank-Nicolson
Suponha que u(x, t) seja uma fun¸c˜ao suficientemente suave, P u(x, t) a equa¸c˜ao diferencial e P∆u o m´etodo de Crank-Nicolson, comumn =u(xn, tm)
e µM = max
0≤x≤L{µ(x)}, ent˜ao
P∆u=
um+1
n −umn
∆t −
µM
2∆x2
¡
um
n−1+umn+1−2(umn +unm+1) +umn−+11 +umn+1+1
¢
, (2.24) Note que, aplicando as expans˜oes de (2.5), obt´em-se
• u
m+1
n −umn
∆t =ut+O(∆t),
• u
m
n−1−2umn +umn+1
∆x2 =uxx+O(∆x 2),
• u
m
n−1−2umn +umn+1
∆x2 =u
+
xx+O(∆x2),
onde todas as derivadas s˜ao calculadas no ponto (xn, tm), ´unica exce¸c˜ao
feita a u+
xx que ´e calculada no ponto (xn, tm+ ∆t).
Substituindo as aproxima¸c˜oes na equa¸c˜ao (2.24) segue que
P∆u=ux+O(∆t)−µM
uxx+u+xx+O(∆x2)
2 .
Logo,
lim
∆t→0 ∆x→0
P u−P∆u = lim ∆t→0 ∆x→0
µ
ut−µMuxx−ut+O(∆t) +µM
uxx+u+xx+O(∆x2)
2
¶
=⇒
lim
∆t→0 ∆x→0
P u−P∆u = ut−µMuxx−ut+µM
uxx+uxx
2 = 0.
Cap´ıtulo 3
A T´
ecnica do Super-Passo
A T´ecnica do Super-Passo ´e uma forma simples e eficiente de se reciclar c´odigos expl´ıcitos, melhorando a sua performace computacional. A T´ecnica do Super-Passo ´e baseada nos M´etodos Runge-Kutta-Chebyshev, como pode ser visto em [28]. Assim como os M´etodos Runge-Kutta, a T´ecnica do Super-Passo ´e composta por N sub-passos (est´agios) e relaxa a restri¸c˜ao temporal imposta pela condi¸c˜ao de estabilidade do m´etodo num´erico expl´ıcito.
Neste Cap´ıtulo, a fim de tornar a compreens˜ao da t´ecnica a mais simples poss´ıvel, ´e apresentada a formula¸c˜ao da T´ecnica do Super-Passo aplicada ao M´etodo de Euler Expl´ıcito para um sistema de equa¸c˜oes diferenciais or-din´arias. O m´etodo aqui descrito poder ser aplicado em malhas estruturadas e n˜ao estruturadas na resolu¸c˜ao num´erica de equa¸c˜oes diferenciais parciais do tipo parab´olico lineares e n˜ao lineares para uma, duas ou trˆes dimens˜oes.
´
§ 3 Super-passo
Considere o sistema de equa¸c˜oes diferenciais ordin´arias
dU
dt +AU(t) = 0, t >0 U(0) =U0,
(3.1)
onde A ´e uma matriz n×n sim´etrica definida positiva e U0 ´e um vetor em
ℜn dado.
O M´etodo de Euler Expl´ıcito para o sistema (3.1) pode ser escrito como
(
Um+1 = (I−∆tA)Um, m= 0,1, . . .
U0 =U 0,
(3.2)
sendo ∆t > 0 o passo de integra¸c˜ao no tempo, I a matriz identidade de ordem n e Um ∈ ℜn um vetor que representa a aproxima¸c˜ao obtida pelo
m´etodo num´erico (3.2) para a solu¸c˜ao do sistema (3.1) no instante de tempo tm =m∆t.
O esquema num´erico em (3.2) ´e est´avel se
ρ(I−∆tA)<1, (3.3)
sendo queρ(·) denota oraio espectral da matriz (I−∆tA),λmax o seu maior
autovalor e λmin o menor. A condi¸c˜ao em (3.3) ´e satisfeita com a escolha
∆t <∆texpl =
2 λmax
. (3.4)
§ 3.1 M´etodos Num´ericos-Super-Passo
Um passo de integra¸c˜ao no tempo da T´ecnica do Super-Passo ∆T, con-siste de N sub-passos (est´agios) τi, com i = 1, . . . , N, ou seja, para cada
super-passo de integra¸c˜ao no tempo ∆T s˜ao calculados os N sub-passos.
Um+1,1 = (I−Aτ1)Um,
Um+1,2 = (I−Aτ2)Um+1,1,
...
Um+1 =Um+1,N = (I−AτN)Um+1,N−1.
Substituindo recursivamente at´e um cicloj obt´em-se uma express˜ao para os primeiros j sub-passos,
Um+1,j =
j
Y
i=1
(I −Aτi)Um, j = 1,2, . . . , N m= 0,1. . .
A demonstra¸c˜ao desta igualdade segue por indu¸c˜ao sobrej.
A T´ecnica do Super-Passo aplicada ao M´etodo de Euler Expl´ıcito comN sub-passos ´e dada por
Um+1 =
N
Y
i=1
(I−Aτi)Um, m = 0,1, . . . , (3.5)
ondeA´e uma matrizn×nsim´etrica definida positiva,I´e a matriz identidade de ordem n, N a quantidade de sub-passos, τi o i-´esimo sub-passo, que ser´a
explicitado na pr´oxima Se¸c˜ao, e Um representa aproxima¸c˜ao num´erica para
§ 3.1 M´etodos Num´ericos-Super-Passo
3.1
Condi¸
c˜
ao de Estabilidade
A T´ecnica do Super-Passo procura relaxar a restri¸c˜ao ao passo de inte-gra¸c˜ao no tempo imposta por (3.4), assim a condi¸c˜ao de estabilidade n˜ao ´e atendida ao final de todo o passo de integra¸c˜ao ∆t, mas apenas ao final de um ciclo de N passos no tempo. A condi¸c˜ao de estabilidade ´e imposta sobre o super-passo ∆T, enquanto tenta-se maximizar a soma ∆T =PN
i=1
τi.
Uma condi¸c˜ao suficiente para que a condi¸c˜ao de estabilidade do algoritmo (3.5) dada em (3.3) seja atendida ´e,
N
Y
i=1
|1−λτi|<1, ∀λ∈[λmin, λmax], (3.6)
onde QN
i=1|
1−λτi| ´e o fator de amplifica¸c˜ao do m´etodo e λmin e λmax s˜ao o
menor e maior autovalor da matriz A.
Existem v´arios valores de τi que satisfazem a condi¸c˜ao acima, mas o
objetivo ´e determinar τ′s tais que:
∆T =
N
X
i=1
τi seja o maior poss´ıvel.
Entretanto, o problema em (3.6) n˜ao ´e conveniente, pois a condi¸c˜ao de es-tabilidade possui uma desigualdade estrita. A condi¸c˜ao (3.6) ser´a substitu´ıda por
N
Y
i=1
|1−λτi| ≤k, ∀λ∈[ǫ, λmax], (3.7)
onde ǫ∈(0, λmin] ek ∈(0,1), ambos fixos.
§ 3.1 M´etodos Num´ericos-Super-Passo
O problema de encontrar os valores “´otimos”para osτ′spode ser reescrito
como encontrar τ1, τ2, . . . , τN tais que
PN(λ) = N
Y
i=1
(1−λτi) (3.8)
satisfa¸ca
|PN(λ)| ≤k, k <1 ∀λ∈[ǫ, λmax] (estabilidade),
¯ ¯ ¯ ¯
dPN
dλ (0)
¯ ¯ ¯ ¯=
N
X
i=1
τi, (valores ´otimos).
Considere o seguinte polinˆomio de grauN em λ,
QN(λ) =
TN
µ
λmax+ǫ−2λ
λmax−ǫ
¶
TN
µ
λmax+ǫ
λmax−ǫ
¶ , (3.9)
onde ǫ∈(0, λmin] eλ ∈[ǫ, λmax].
O numerador ´e um Polinˆomio de Chebyshev de grauN definido no inter-valo [ǫ, λmax], e o denominador ´e uma constante.
Pelas propriedades dos Polinˆomios de Chebyshev, tem-se que,
¯ ¯ ¯ ¯
TN
µ
λmax+ǫ−2λ
λmax−ǫ
¶¯ ¯ ¯ ¯≤
1.
Assim, o polinˆomio em (3.9) ´e limitado por
k′ = 1
TN
µ
λmax+ǫ
λmax−ǫ
§ 3.1 M´etodos Num´ericos-Super-Passo
note que
λmax+ǫ
λmax−ǫ
>1,
e, pelas propriedades dos polinˆomios de Chebyshev, tem-se que
¯ ¯ ¯ ¯ TN µ
λmax+ǫ
λmax−ǫ
¶¯ ¯ ¯ ¯
>1,
onde ǫ∈(0, λmin] e 0< λmax.
Ent˜ao
|k′|<1.
As ra´ızes do polinˆomio QN(λ) s˜ao as mesmas do Polinˆomio de Chebyshev
TN
³
λmax+ǫ−2λ
λmax−ǫ
´
e s˜ao dadas por:
λi =
1 2
µ
(−λmax+ǫ) cos
µ
2i−1 N
π 2
¶
+λmax+ǫ
¶
, i= 1, . . . , N.
onde ǫ∈(0, λmin).
Voltando ao fator de amplifica¸c˜ao da T´ecnica do Super-Passo, que ´e dado pela fun¸c˜ao,
PN(λ) = N
Y
i=1
(1−λτi). (3.10)
Procura-se determinar quais valores deτ′s satisfazem:
|PN(λ)| ≤k, ∀λ∈[ǫ, λmax], k <1, (3.11)
¯ ¯ ¯P ′ N(0) ¯ ¯ ¯= N X i=1
τi. (3.12)
Escolhe-se
τi =
1 λi
§ 3.1 M´etodos Num´ericos-Super-Passo
Ent˜ao, (3.10) pode ser escrito como,
PN(λ) = N
Y
i=1
µ
1−λ 1 λi
¶
, com i= 1, . . . N.
Assim, asN ra´ızes de (3.10) s˜ao dadas por λi, i= 1, . . . , N.
Logo, tˆem-se dois polinˆomios, PN e QN de grau N com as mesmas N
ra´ızes λi, e PN(0) =QN(0) = 1.
Portanto,
PN(λ)≡QN(λ), ∀λ∈(ǫ, λmax].
A condi¸c˜ao em (3.11) ´e garantida escolhendok =k′, ou seja,
|PN(λ)| ≡ |QN(λ)| ≤ |k′|<1, ∀λ∈(ǫ, λmax].
Pelos artigos [2], [1] e [18], sabe-se que o maior valor para a soma em (3.12) ´e obtido escolhendo,
τi =
1 λi
, com i= 1, . . . , N.
Os sub-passos de integra¸c˜ao no tempo τ′s s˜ao dados explicitamente por,
τi = 2
µ
(−λmax+ǫ) cos
µ
2i−1 N
π 2
¶
+λmax+ǫ
¶−1
, i= 1, . . . , N,
que podem ser reescritos mais convenientemente como,
τi = ∆texpl
µ
(−1 +ν) cos
µ
2i−1 N
π 2
¶
+ 1 +ν
¶−1
, i= 1, . . . , N, (3.13)
ondeν = λ ǫ
max, 0< ν <1, ∆texpl =
2
§ 3.1 M´etodos Num´ericos-Super-Passo
Note que seN = 1 e ν = 0 segue que τ1 = ∆texpl, ou seja, a T´ecnica do
Super-Passo realiza as mesmas aproxima¸c˜oes do M´etodo de Euler Expl´ıcito. Utilizando a condi¸c˜ao (3.12) e uma das formula¸c˜oes dos Polinˆomios de Chebyshev o tamanho do super-passo, ∆T, pode ser expresso explicitamente como,
∆T =
N
X
i=1
τi = ∆texpl
N 2√ν
µ
(1 +√ν)2N −(1−√ν)2N
(1 +√ν)2N + (1−√ν)2N
¶
, (3.14)
Assim,
∆T −−→
ν→0 N 2∆t
expl,
isso ´e,
∆T
∆texpl −−→ν→0
N2. (3.15)
A Tabela (3.1) apresenta os diferentes valores do super-passo de inte-gra¸c˜ao no tempo quando ν → 0, e a aproxima¸c˜ao num´erica para N2 no
limite (3.15). Para se obter os resultados tabelados aplicou-se a (3.14) com 9 sub-passos, e o passo de integra¸c˜ao no tempo, determinado pela condi¸c˜ao de estabilidade do M´etodo de Euler Expl´ıcito ´e ∆texpl = 1.851852×10−6.
ν ∆T N2
10−1 2.635191×10−5 14.23
10−2 7.895230×10−5 42.63
10−3 1.356929×10−4 73.27
10−4 1.484056×10−4 80.13
10−5 1.498387×10−4 80.91
10−6 1.499839×10−4 80.99
Tabela 3.1: Aproxima¸c˜ao num´erica para o limite (3.15).
§ 3.3 Ordem
Note queN passos de um m´etodo expl´ıcito de comprimento ∆texplcalcula
aproxima¸c˜oes em um instante final N∆texpl, mas a T´ecnica do Super-Passo
com N sub-passos realiza aproxima¸c˜oes para um instante de tempo t = N2∆t
expl quando ν →0.
Assim a T´ecnica do Super-Passo cobre um intervaloN vezes maior com custo computacional adicional de calcular (3.13) no primeiro ciclo dos N sub-passos no tempo.
3.2
Consistˆ
encia
A T´ecnica do Super-Passo ser´a consistente se o m´etodo expl´ıcito a que ela for aplicada o for, pois a t´ecnica altera apenas o tamanho do passo no tempo.
3.3
Erro Cometido na Aproxima¸
c˜
ao pela T´
ecnica
do Super-Passo
Para analisar o erro cometido entre a aproxima¸c˜ao gerada pela T´ecnica do Super-Passo e a solu¸c˜ao anal´ıtica de um problema, para manter a sim-plicidade e clareza dos resultados obtidos considerou-se o problema modelo proposto em (3.1) comn= 1, ou seja, considerou-se o caso em que o sistema de equa¸c˜oes diferenciais ´e unidimensional. Assim o problema (3.1) possui como solu¸c˜ao u(t) = u0e−λt, o erro cometido na aproxima¸c˜ao pela T´ecnica
§ 3.3 Ordem
tempo ´e dado por:
¯ ¯e(k)
¯ ¯ ≡
¯
¯u(k∆T)−U(k) ¯ ¯= ¯ ¯ ¯ ¯ ¯
e−λk∆T
−
N
Y
i=1
(1−λτi)U(k−1)
¯ ¯ ¯ ¯ ¯ = = ¯ ¯ ¯ ¯ ¯
e−λ∆Te−λ(k−1)∆T
−
N
Y
i=1
(1−λτi)U(k−1)
¯ ¯ ¯ ¯ ¯ = = ¯ ¯ ¯ ¯ ¯
e−λ∆Tu((k
−1)∆T)−
N
Y
i=1
(1−λτi)U(k−1)
¯ ¯ ¯ ¯ ¯ .
Somando e subtraindo
N
Q
i=1
(1−λτi)u((k−1)∆T) segue
¯ ¯ek
¯ ¯ ≡ ¯ ¯ ¯ ¯ ¯
e−λ∆Tu((k
−1)∆T)−
N
Y
i=1
(1−λτi)u((k−1)∆T)+
+
N
Y
i=1
(1−λτi)u((k−1)∆T)− N
Y
i=1
(1−λτi)U(k−1)
¯ ¯ ¯ ¯ ¯ = = ¯ ¯ ¯ ¯ ¯ "
e−λ∆T
−
N
Y
i=1
(1−λτi)
#
u((k−1)∆T)+
+ £
u((k−1)∆T)−U(k−1)¤
N
Y
i=1
(1−λτi)
¯ ¯ ¯ ¯ ¯ ≤ ≤ ¯ ¯ ¯ ¯ ¯
e−λ∆T − N
Y
i=1
(1−λτi)
¯ ¯ ¯ ¯ ¯
|u((k−1)∆T)|+
+ ¯
¯u((k−1)∆T)−U(k−1) ¯ ¯ ¯ ¯ ¯ ¯ ¯ N Y i=1
(1−λτi)
§ 3.3 Ordem
Portanto,
¯ ¯e(k)
¯ ¯≤ ¯ ¯ ¯ ¯ ¯
e−λ∆T
−
N
Y
i=1
(1−λτi)
¯ ¯ ¯ ¯ ¯
|u((k−1)∆T)|+¯
¯u((k−1)∆T)−U(k−1) ¯ ¯ ¯ ¯ ¯ ¯ ¯ N Y i=1
(1−λτi)
¯ ¯ ¯ ¯ ¯ (3.16) Observe que,
• |u((k−1)∆T)|=¯
¯u0e−λ(k−1)∆T ¯
¯≤ |u0|,
• ¯ ¯ ¯ ¯ N Q i=1
(1−λτi)
¯ ¯ ¯
¯<1, condi¸c˜ao de estabilidade.
Substituindo em (3.16), tem-se
¯ ¯ek
¯ ¯≤ ¯ ¯ ¯ ¯ ¯
e−λ∆T
−
N
Y
i=1
(1−λτi)
¯ ¯ ¯ ¯ ¯
|u0|+
¯ ¯ek−1
¯ ¯.
Note que o erro cometido no instante de tempotk pela T´ecnica do
Super-Passo ´e dado em fun¸c˜ao do erro cometido no instante de tempo anterior. Logo,
¯ ¯ek−1
¯ ¯≤ ¯ ¯ ¯ ¯ ¯
e−λ∆T
−
N
Y
i=1
(1−λτi)
¯ ¯ ¯ ¯ ¯
|u0|+
¯ ¯ek−2
¯ ¯.
Aplicando recursivamente at´e o termo |e0|= 0 obt´em-se
¯ ¯ek
¯ ¯≤k
¯ ¯ ¯ ¯ ¯
e−λ∆T
−
N
Y
i=1
(1−λτi)
¯ ¯ ¯ ¯ ¯
|u0|. (3.17)
A expans˜ao em s´erie de Taylore−λ∆T ´e dada por:
e−λ∆T = 1
−λ∆T +(λ∆T)
2
2 −
(λ∆T)3
6 +
(λ∆T)4
24 +O(∆T
5).
§ 3.3 Ordem
¯ ¯ek
¯ ¯≤k
λmax
2
à N X
i=1
τi2=1
!
|u0|. (3.18)
onde λmax = ∆t2
expl.
A express˜ao (3.18) depende apenas de ∆texpl, assim o m´etodo ´e de ordem
Cap´ıtulo 4
Resultados Num´
ericos
O presente Cap´ıtulo apresenta as valida¸c˜oes por refinamento de malha e a compara¸c˜ao de performance dos m´etodos deEuler Expl´ıcito,Euler Impl´ıcitoe
Crank-Nicolson com o m´etodo resultante da conjun¸c˜ao daT´ecnica do Super-Passo ao M´etodo de Euler Expl´ıcito para a aproxima¸c˜ao num´erica da solu¸c˜ao da equa¸c˜ao do calor.
Os m´etodos foram implementados em linguagem de programa¸c˜ao FOR-TRAN 90 utilizando precis˜ao dupla. Para medir o tempo de processamento dos m´etodos num´ericos utilizados foi utilizada a subrotina impl´ıcita da lin-guagem FORTRAN 90 timef. (maiores detalhes sobre a linguagem FOR-TRAN podem ser encontradas em [6]).
4.1
An´
alise Num´
erica de Convergˆ
encia
Antes de analisar a convergˆencia dos m´etodos num´ericos ´e necess´ario de-screver qual ser´a a norma adotada e como a an´alise de convergˆencia num´erica ser´a realizada.
§ 4.1 An´alise de Convergˆencia
deste vetor ser´a dada por
kek∞ = max
0≤i≤n{|ei|}. (4.1)
Considere a seguinte equa¸c˜ao diferencial parcial do tipo parab´olico junta-mente com as suas condi¸c˜oes de contorno e inicial
ut(x, t)−[µ(x)ux(x, t)]x =f(x, t),
u(x,0) =φ(x) x∈[0, L], u(0, t) =g(t) t∈[0, T], u(L, t) =h(t) t∈[0, T],
(4.2)
definida no dom´ınio Ω = [0, L]×[0, T], com µ(x)>0,∀x∈[0, L].
Dividiu-se o intervalo [0, L], da vari´avel espacial x, em N partes iguais de comprimento ∆x, obtendo os N + 1 pontos xi = i∆x, i = 0,1, . . . , N,
onde ∆x = L
N, particionando o intervalo [0, T] da vari´avel temporal t pelo
passo de integra¸c˜ao no tempo ∆t, que ´e determinado respeitando a condi¸c˜ao de estabilidade do m´etodo num´erico, obt´em-se a quantidade de passos no tempo M, ou seja, tem-se M + 1 pontos ti =i∆t,i= 0,1, . . . , M.
A solu¸c˜ao u(x, t) do problema (4.2) nos pontos do dom´ınio discretizado Ω∆t
∆x = {(xi, tj)∈Ω/xi =i∆x e tj =j∆t} ´e representada por u(xi, tj) =
ui,j e a aproxima¸c˜ao num´erica obtida por algum m´etodo num´erico ser´a
de-notada por Ui,j.
A aproxima¸c˜ao obtida por um m´etodo num´erico para aproximar a solu¸c˜ao do problema proposto em (4.2), possui um erro que ´e dado por ei,j =|ui,j−
Ui,j|, comi= 0,1, . . . , N ej = 0,1, . . . , M.
§ 4.1 An´alise de Convergˆencia
pode se escrever a expans˜ao assint´otica.
U(x, t,∆x) = u(x, t) +Eq(x, t)∆xq+Eq+1(x, t)∆xq+1+. . . , (4.3)
onde u(x, t) ´e a solu¸c˜ao exata, e com coeficientes funcionais Ei(x, t), i =
q, q+ 1, . . . independem de ∆x.
No problema apresentado na valida¸c˜ao e na compara¸c˜ao de performance dos m´etodos num´ericos, a solu¸c˜ao anal´ıtica u(x, t) ´e conhecida a priori. Para este problema, as expans˜oes deU(x, t,∆x) eU(x, t,∆x
2 ), para o mesmo ponto
(x, t), podem ser expressas como
U(x, t,∆t)≈u(x, t) +Eq(x, t)∆tq,
U(x, t,∆2t)≈u(x, t) +Eq(x, t)∆t
q
2q .
(4.4) Tais aproxima¸c˜oes permitem estimar a raz˜ao de convergˆencia do m´etodo num´erico
|U(x, t,∆t)−u(x, t)|∞
¯
¯U(x, t,∆t
2 )−u(x, t)
¯ ¯
∞
≈2q. (4.5)
A convergˆencia da raz˜ao em (4.5) para 2, 4, 8,. . . , significa que o m´etodo num´erico tem ordem q= 1,2,3, . . ., respectivamente.
A estimativa da raz˜ao de convergˆencia em (4.5) ser´a utilizada na valida¸c˜ao dos m´etodos num´ericos implementados.
A implementa¸c˜ao dos m´etodos num´ericos foi validada empregando a an´alise de convergˆencia explicada anteriormente, utilizando o seguinte problema modelo:
ut−[µ(x)ux]x =f(x, t),
u(x,0) = cos (πx), 0≤x≤ 14; 0≤t≤ 14, u(0, t) = cos (πt), u¡1
4, t
¢
= √2
2 cos (πt),
µx(x) =
1
2, µ(x) = x 2 + 1,
§ 4.1.2 An´alise de Convergˆencia
onde f(x, t) =ut−[µ(x)ux]x e u(x, t) = cos (πx) cos (πt).
4.1.1
M´
etodo de Euler Expl´ıcito
O passo no tempo para o m´etodo de Euler Expl´ıcito foi ∆t = ∆3x2, note que esta escolha respeita a condi¸c˜ao de estabilidade do m´etodo, como visto em (2.2.1). Definiu-se ∆texpl = ∆x
2
3 como sendo delta t expl´ıcito.
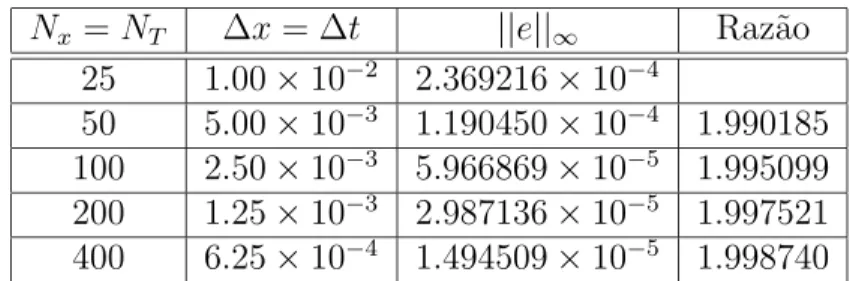
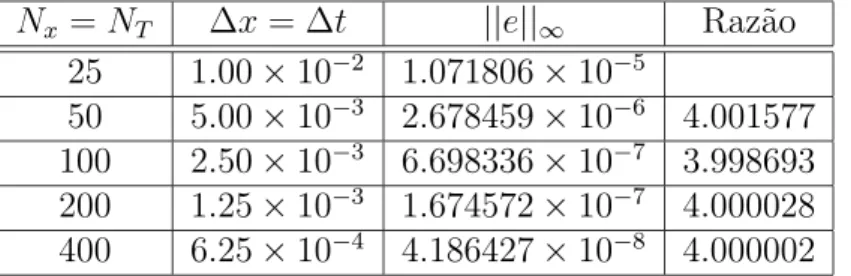
As tabelas a seguir apresentam, Nx, NT as respectivas divis˜oes do
in-tervalo de defini¸c˜ao nas dire¸c˜oes x e t, o s´ımbolo ∆x representa o passo de integra¸c˜ao no espa¸co, ||e||∞o erro m´aximo cometido na aproxima¸c˜ao e raz˜ao a ordem do m´etodo num´erico ao quadrado.
Nx ∆x NT ||e||∞ Raz˜ao
25 1.00×10−2 8438 5.387633×10−6
50 5.00×10−3 33751 1.347009×10−6 3.999700
100 2.50×10−3 135000 3.368690×10−7 3.998613
200 1.25×10−3 540000 8.421701×10−8 4.000011
400 6.25×10−4 2160000 2.105431×10−8 3.999989
Tabela 4.1: Resultados num´ericos obtidos pelo M´etodo de Euler Expl´ıcito na aproxima¸c˜ao da solu¸c˜ao do problema (4.6).
A tabela acima mostra que quando o passo de integra¸c˜ao no espa¸co, ∆x, ´e dividido por dois o erro cometido na aproxima¸c˜ao diminui e a raz˜ao entre os erros tende a 4.
Assim, como foi utilizado ∆texpl = ∆x
2
3µmax, onde µmax = µ(1) = 1.5,
conclui-se que o M´etodo de Euler Expl´ıcito tem ordem 1.