Controle Ótimo de Vazão em Múltiplos Tanques Considerando
Falha no Controle de Vazão em Um ou Mais Tanques
Optimal Flow Control in Multiple Tanks Considering Failure in
the Flow Control in One or More Tanks
Victoria de Souza Rodrigues, [email protected] André Fenili
Universidade Federal do ABC, Santo André, SP
Submetido em 01/03/2017 Revisado em 01/03/2017 Aprovado em 02/05/2017
Resumo: Este artigo tem por objetivo modelar matematicamente um sistema de múltiplos tanques associado ao sistema de propulsão de um veículo espacial e controlar o fluxo de propelente líquido entre esses tanques. Propõe-se investigar um sistema de controle que leva em consideração falhas no sistema de propulsão do veículo e o desbalanceamento entre as massas nos tanques. O controle investigado neste trabalho é o SDRE. Os resultados obtidos indicam que o sistema pode ser estabilizado de maneira satisfatória. Palavras chave: Controle de vazão. Controle não linear. SDRE. Múltiplos tanques.
Abstract: This article aims to mathematically model a system of multiple tanks associated with the propulsion system of a spacecraft and to control the flow of liquid propellant between these tanks. It is proposed to investigate a control system that takes into account failures in the propulsion system of the vehicle and the unbalance between masses in the tanks. The control investigated in this work is the SDRE. The results obtained indicate that the system can be stabilized satisfactorily.
1. Introdução
Sistemas de múltiplos tanques são encontrados em diversas aplicações, inclusive na área de engenharia aeroespacial, como é o caso de foguetes e satélites. Nessas aplicações citadas, o estudo e o aprimoramento de componentes ligados ao sistema de propulsão são essenciais para garantir o sucesso de uma missão espacial. Uma pesquisa feita em 1992 analisando 2500 falhas em veículos espaciais entre 1962 e 1988 concluiu que quase 4% delas eram causadas pelo sistema de propulsão [1]. Esse número pode parecer pequeno, mas é maior do que o número de falhas estruturais (que representam cerca de 3,5%). Além disso, nem toda falha significa perda da missão, pois muitas vezes elas são corrigidas por sistemas previamente preparados para situações de emergência, mas as falhas no sistema propulsivo são, em geral, fatais [1]. Um exemplo de missão não concluída é de outubro de 1972, quando a sonda Mariner 9 estava em torno da órbita de Marte. Apesar de ter coletado mais de sete mil fotos que permitiram a elaboração do primeiro mapa global deste planeta, a missão desta sonda foi encerrada muito antes do previsto devido a uma falha de projeto que não previa a necessidade de comunicação dos tanques que compunham o sistema. Em suma, o gás controlador de um dos tanques se esgotou, enquanto ainda havia combustível em outro tanque para a propulsão. Se os tanques de gás de controle de atitude e de propulsão tivessem sido conectados, a missão poderia ter durado ainda mais um ano [1].
A conexão entre os tanques de forma a permitir o fluxo de propelente líquido entre eles também tem sua importância no que diz respeito à distribuição de massa mais homogênea no satélite como um todo. Considerando que um satélite tem simetria em dois eixos e que há um mesmo número de tanques com as mesmas características e com o mesmo propelente líquido em cada lado do satélite, a massa da estrutura fica homogênea quando estes tanques possuem o mesmo volume de propelente. Uma diferença de massa entre eles ocasiona o desequilíbrio que, por sua vez, pode levar ao aparecimento de torques indesejáveis na estrutura; consequentemente, o
controle de atitude gastará mais energia para compensar este
Foguetes e satélites, quando se utilizam de propelente líquido, possuem tanques de armazenamento de combustível e de oxidante responsáveis pela propulsão e pelo controle de posição destes veículos durante as suas respectivas missões. Em ambos, é possível haver propulsão monopropelente e bipropelente, e inclusive pode haver ambas no mesmo sistema, o qual faz uso de cada tipo em cada etapa da missão, como é o caso do lançador Ariane 5 [2]. Os tipos de propulsão citados dependem do caráter da missão, mas ambos apresentam vantagens em relação ao combustível sólido, como a possibilidade de se controlar a propulsão, podendo interromper a ignição a qualquer momento. Frente a isso, o presente projeto estuda o controle de vazão de tanques monopropelentes, simulando o uso da hidrazina como combustível nos tanques [3]. Uma desvantagem, porém, de se utilizar combustível líquido ao invés do sólido é o aumento da complexidade do sistema, que deve contar com bombas e tubulações [3]. Uma forma de amenizar essa adversidade é também proposta neste projeto, assumindo que o controle de vazão é feito pela variação de diâmetro da válvula de saída do combustível para a câmara de combustão. Este controle substitui outro mais complexo, exercido por uma pressurização contínua do gás em cima da coluna de líquido dentro de cada tanque (parte do tanque conhecida como “ullage”).
Devido ao caráter fortemente não-linear do sistema em estudo, a técnica de controle utilizada para o controle de vazão foi a denominada SDRE – State Dependent Riccati Equation [4]. A escolha deste controle se dá pelo grande número de projetos em diversas áreas que obtiveram resultados satisfatórios publicados a partir da utilização dele [5].
O presente trabalho tem como objetivo geral compreender com maior profundidade tópicos como simulação numérica no software Matlab e modelagem matemática. Além disso, o estudo mais detalhado do controle não-linear em uma aplicação na área de engenharia aeroespacial é também parte do objetivo geral.
Como objetivo específico do projeto estão a modelagem matemática, a implementação do controle não-linear SDRE e a simulação numérica de um sistema de múltiplos tanques com falha em seu sistema de propulsão. É intensão do projeto simular primeiramente o funcionamento da tubulação de conexão entre os tanques. Além disso, é também objetivo do trabalho analisar
se a propulsão do satélite se mantém constante mesmo com falha na saída de propelente em um dos tanques. Este tipo de sistema pode ser encontrado em sistemas reais, como em motores-foguete e em satélites.
2. Metodologia
A análise, a modelagem matemática e implementação do controle não -linear em um sistema de múltiplos tanques são feitas. São considerados sistemas de dois tanques, uma análise que consiste em uma primeira abordagem para a expansão do estudo em um número maior de tanques. Todos os programas desenvolvidos utilizaram a plataforma de simulação numérica Matlab.
As modelagens matemáticas dos vários tanques e de seus orifícios de entrada e saída de propelente líquido foram feitas com base nos conceitos de balanço de massa e energia da mecânica dos fluidos [6]. O controle não linear SDRE foi implementado a partir da investigação deste em outros casos publicados em artigos que são similares ao presente estudo. Os modelos matemáticos em malha fechada foram integrados numericamente utilizando o Runge-Kutta de quarta ordem [7].
3. O sistema de dois tanques
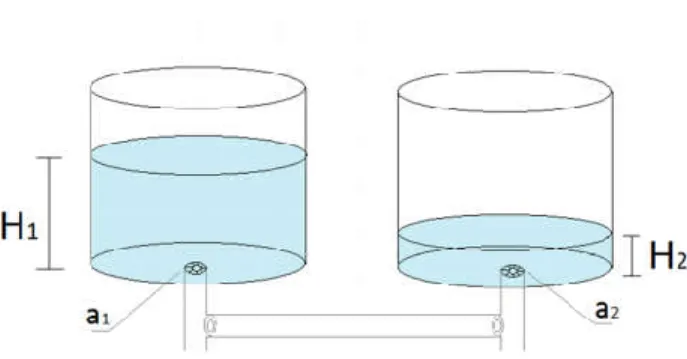
O sistema investigado neste trabalho é ilustrado na Fig. (1). A abordagem do sistema de dois tanques é o primeiro passo para o estudo de múltiplos tanques, geralmente encontrado em veículos espaciais.
Figura 1. Sistema composto por dois tanques com uma tubulação de conexão entre eles. H1 representa a altura da coluna de líquido no primeiro tanque e H2 no segundo tanque. As variáveis a1 e a2 representam as áreas dos orifícios de entrada e
Os dois tanques ilustrados possuem as mesmas dimensões e são feitos do mesmo material. O tubo de conexão ilustrado entre os tanques permite o fluxo de propelente líquido entre eles.
A tubulação vertical na saída dos orifícios no fundo de cada tanque possui duas funções: i) dirigir a vazão de cada tanque para a câmara de combustão (não representada na figura); ii) conduzir a vazão para o outro tanque, através da tubulação que os conecta. Essas duas funções apresentadas só operam separadamente. Quando a primeira está em operação, a entrada para a tubulação de conexão permanece fechada. E quando a segunda está em operação, a entrada para a tubulação que guia o fluxo até a câmara de combustão permanece fechada.
Na fase de propulsão (quando a primeira função está em operação) os tanques agem de forma independente, porém ambos contribuem para a queima na mesma câmara de combustão. Como o sistema propulsivo aqui considerado é monopropelente, ambos os tanques possuem o mesmo líquido (neste caso, a hidrazina) e são usados na mesma proporção na propulsão. Idealmente falando, ambos os tanques deveriam expelir a mesma quantidade de combustível na fase de propulsão, sempre mantendo o equilíbrio na estrutura. Mas como a propulsão depende de muitos parâmetros, como temperatura, pressão, forma como o combustível é injetado na câmara, entre outros, no final, é muito grande a possibilidade de ter ocorrido um desequilíbrio na quantidade de líquidos entre os tanques [8].
Considerando que o sistema em estudo consiga monitorar este desequilíbrio, é depois da propulsão que se inicia a fase de comunicação entre os tanques (ou seja, passa a operar a segunda função acima apresentada), de forma a reestabelecer o equilíbrio inicial do sistema, permitindo que ocorra uma nova propulsão, sem que um dos tanques tenha seu combustível consumido primeiro, outro problema altamente indesejável [8].
4. Modelagem Matemática
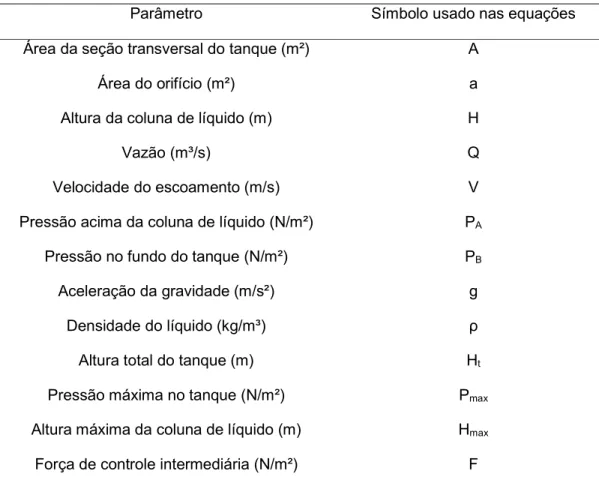
As variáveis e constantes que compõe as equações governantes do sistema são apresentadas na tabela 1. Nas equações apresentadas nesta seção, as variáveis indicadas com o índice “1” são referentes ao primeiro tanque e com índice “2” ao segundo tanque. Ambos os tanques são idênticos,
então as equações demostradas aqui são somente referentes ao primeiro tanque, mas são igualmente válidas para o segundo tanque.
Tabela 1. Lista de variáveis e constantes usadas nas equações
Parâmetro Símbolo usado nas equações
Área da seção transversal do tanque (m²) A
Área do orifício (m²) a
Altura da coluna de líquido (m) H
Vazão (m³/s) Q
Velocidade do escoamento (m/s) V
Pressão acima da coluna de líquido (N/m²) PA
Pressão no fundo do tanque (N/m²) PB
Aceleração da gravidade (m/s²) g
Densidade do líquido (kg/m³) ρ
Altura total do tanque (m) Ht
Pressão máxima no tanque (N/m²) Pmax
Altura máxima da coluna de líquido (m) Hmax
Força de controle intermediária (N/m²) F
A Eq. (1) é a equação da continuidade [6] para o tanque 1 e a Eq. (2) é a Equação de Bernoulli [6] aplicada no problema estudado neste trabalho. A relação entre as forças dentro do tanque resulta na Eq. (3) e sua demonstração é apresentada em [9]. 1 1 1 dH A + Q = 0 dt (1) 2 2 1A 1A 1 1B 1B 1 1 ρV + P + ρgH = ρV + P 2 2 (2) ρQ (V - V ) = ρA gH + P A - P a1 1B 1A 1 1 1A 1 1B 1 (3)
A Equação de Boyle [10] foi usada para obter uma equação que relacionasse a pressão dentro do tanque (que fica acima da coluna de líquido)
e a altura desta coluna. Denotando por P1A a pressão interna do gás no tanque 1, Pmax1 sendo a pressão máxima suportada internamente pelo tanque 1, Ht1 a altura total do tanque 1 e Hmax1 a altura total da coluna de líquido, a Eq. (4) mostra a relação entre essas variáveis.
max1 t1 max1 1A t1 1 P ×(H -H ) P = (H -H ) (4) Manipulando as equações (1), (2), (3) e (4), e considerando que o controle atua no diâmetro do orifício no fundo do tanque 1, é possível obter as expressões para a taxa de variação da altura da coluna de líquido (H1) e a
vazão neste tanque (Q ). 1
Nesta manipulação, a força de controle substitui a força da coluna de líquido somada à força do gás pressurizado acima desta coluna; essas forças atuam em cima da área do orifício no fundo do tanque 1. Essa área é onde fisicamente o controle atua. As equações (5) e (6) mostram as expressões resultantes para as taxas de variações mencionadas.
1 1 1 -Q H = A (5) 1 1 1 1 1 2 2 2 2 1 t1 1 1 1 1 t1 1 1 1 1 t1 1 1 1 controle 1 1 1 2 2 2 t 1 1 1 controle t 1 1 1 t 1 1 1 1 1 1 1 1 1 1 1 1 Q = (H - H ) ρgA a H + (H - H )e A a (H - H ) A a F G G G 1 1 - (H - H ) A a F (H - H ) ρa Q - (H - H ) ρgA a + e A a Q G G - (6) Onde:
1 2 1 t 1 1 1 1 1 G = (H - H ) 2ρQ A - 2ρQ a (7)As equações (5) e (6) para o tanque 1 não dependem de nenhuma variável relacionada ao tanque 2. Para acoplar as equações de ambos os tanques, o que significa conectá-los fisicamente, é necessário acrescentar matematicamente uma força intermediária no controle de cada tanque. As forças intermediárias são denotadas por F1 e F2 e são mostradas pelas equações (8) e (9), respectivamente. controle controle 1 1 1 αF +βF =F (8) 2 2 controle controle 2 γF +δF =F (9) Os valores de α, β, γ e δ são dados pelas equações (10), (11), (12) e (13),
respectivamente. 1 2 2 2 t 1 1 1 1 1 1 1 1 α = (H - H ) ρgA a - e A a G (10) 1 1 2 2 t 1 1 1 t 1 1 1 1 1 1 1 1 β= (H -H ) ρa Q -(H -H ) ρgA a +e A a G (11) 2 2 2 2 t 2 2 2 2 2 2 2 1 γ= (H -H ) ρgA a -e A a G (12) 2 2 2 2 t 2 2 2 t 2 2 2 2 2 2 2 1 δ= (H -H ) ρa Q -(H -H ) ρgA a +e A a G (13)
As equações, agora acopladas, são reescritas para cada tanque, como mostram as equações (14), (15), (16) e (17). H =1 -Q1 A1 (14) 1 1 1 1 2 2 2 2 1 1 1 1 t t 1 1 1 1 1 1 1 1 1 1 2 2 t 1 1 1 t 1 1 1 1 1 1 1 1 1 1 Q = e A a H + (H -H ) ρgA a -e A a H +F G G 1 + (H -H ) ρa Q -(H -H ) ρgA a +e A a Q G (15) 2 2 2 Q H A (16) 2 2 2 2 2 2 2 2 2 2 2 2 t t 2 2 2 2 2 2 2 2 2 2 2 2 t 2 2 2 t 2 2 2 2 2 2 2 2 H 1 1 Q = e A a H + (H -H ) ρgA a -e A a + G G 1 +F + (H -H ) ρa Q -(H -H ) ρgA a +e A a Q G (17) 5. Controle SDRE
A técnica de controle não-linear utilizada para o controle de vazão através do controle do diâmetro variável do orifício é conhecido como controle SDRE – State Dependent Riccati Equation [4]. O SDRE pode ser considerado uma extensão do controle linear LQR (Linear Quadratic Regulator) para o controle de sistemas não-lineares [11]. De forma muito resumida, o controle SDRE aplica o controle LQR a cada iteração do integrador numérico.
O controle SDRE soluciona problemas de controle ótimo que são escritos na forma da Eq. (18).
No problema em estudo, a derivada de ‘x’ é o vetor que contém as derivadas de H1, Q1, H2 e Q2. A matriz A contém os coeficientes do vetor ‘x’ e é função do tempo. A matriz B é a matriz dos coeficientes que multiplicam o vetor ‘u’, o qual contém as forças de controle intermediárias (F1 e F2). A matriz B pode ser tanto constante como variável no tempo. Para este caso, B é considerada constante. As matrizes explícitas são mostradas na equação (19).
1 1 1 1 1 1 2 2 2 u 2 2 2 B x x A( x) 1 0 0 0 H A H 0 0 Q 0 0 Q 1 0 F F 1 H 0 0 H 0 0 0 A Q 0 1 Q 0 0 (19) Onde: 2 2 2 t1 1 1 1 1 1 1 1 1 (H H ) gA a e A a G (20) 2 2 t1 1 1 1 t1 1 1 1 1 1 1 1 1 (H H ) a Q (H H ) gA a e A a G (21) 2 2 2 t 2 2 2 2 2 2 2 2 1 (H H ) gA a e A a G (22) 2 2 t 2 2 2 2 t 2 2 2 2 2 2 2 2 1 (H H ) a Q (H H ) gA a e A a G (23)
Com as matrizes acima definidas, o vetor ‘u’ deve ser escrito de forma a permitir a implementação do controle SDRE. Isto é, ‘u’ deve ser escrito na forma como mostra a Eq. (24).
' 1 T 1 ' 2 F u R B Px F (24)
A matriz R é oriunda da função custo apresentada na Eq. (25) [4]. O objetivo do controle é minimizá-la.
x (t)Q(x)x(t) u (t)R(x)u(t)T T (25) As matrizes Q(x) e R(x) são matrizes de peso, responsáveis por permitir que se atribuam diferentes importâncias aos parâmetros do sistema.6. Simulação Numérica
Nesta seção serão apresentadas duas simulações numéricas. A primeira simulação é feita para mostrar como é o funcionamento da tubulação de conexão entre os tanques. A segunda mostra como o sistema se comporta frente a uma falha no sistema de propulsão.
Primeiro caso: comportamento do sistema na fase de conexão entre os tanques
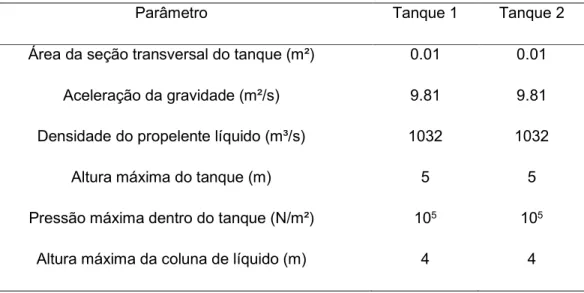
Os parâmetros de valor constante que caracterizam o sistema são mostrados na Tabela 2.
Tabela 2. Parâmetros constantes para o sistema utilizado nas simulações
Parâmetro Tanque 1 Tanque 2
Área da seção transversal do tanque (m²) 0.01 0.01 Aceleração da gravidade (m²/s) 9.81 9.81 Densidade do propelente líquido (m³/s) 1032 1032
Altura máxima do tanque (m) 5 5
Pressão máxima dentro do tanque (N/m²) 105 105
Altura máxima da coluna de líquido (m) 4 4
Tabela 3. Condições iniciais simuladas no primeiro caso
Parâmetro Tanque 1 Tanque 2
Área do orifício (m²) 0.009 0.009
Altura da coluna de líquido (m) 3 1
Na tabela 3, encontram-se os valores iniciais das variáveis deste mesmo sistema. Há aqui neste caso um desequilíbrio devido à altura da coluna de líquido no tanque 1 ser maior que a do tanque 2. É, portanto, esperado que haja um fluxo de líquido indo do tanque 1 para o tanque 2 ao longo do tempo.
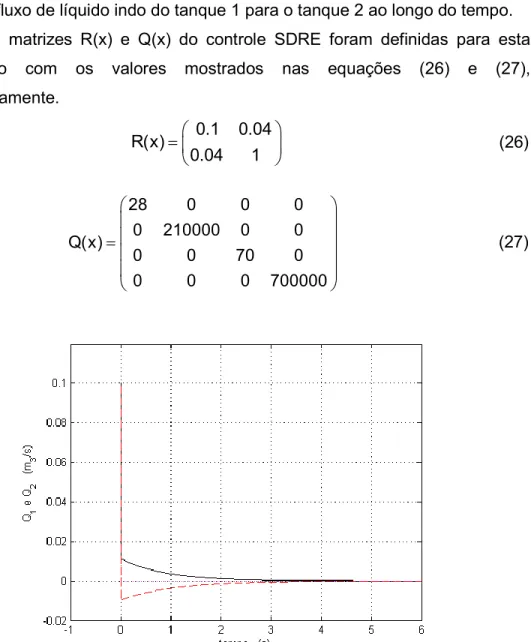
As matrizes R(x) e Q(x) do controle SDRE foram definidas para esta simulação com os valores mostrados nas equações (26) e (27), respectivamente. R(x) 0.1 0.04 0.04 1 (26) 28 0 0 0 0 210000 0 0 Q(x) 0 0 70 0 0 0 0 700000 (27)
Figura 2. As curvas de vazão convergem para o mesmo valor em ambos os tanques. A linha sólida é referente ao tanque 1 e a linha tracejada ao tanque 2.
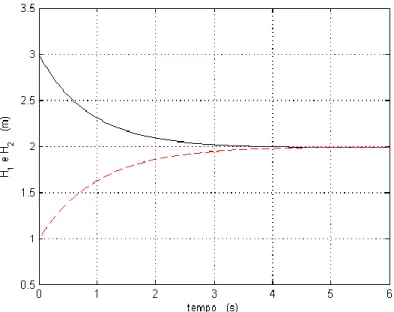
As figuras (2) e (3) mostram o comportamento da vazão e da altura da coluna de líquido dentro de cada tanque. Ao mesmo tempo em que as vazões tendem a zero, as alturas convergem para o mesmo valor, que representa a média dos valores de altura em cada tanque inicialmente (então, neste caso, a altura média é de 2 metros). Portanto, o controle atua no sentido de igualar as
alturas e zerar as vazões, com a vantagem de poder modificar o tempo de convergência deste processo, o que não é possível de ocorrer no caso sem controle.
Figura 3. Alturas das colunas de líquido em cada tanque. Linha contínua para o tanque 1 e linha tracejada para o tanque 2. A linha magenta pontilhada traça o valor
médio das alturas de propelente nos tanques.
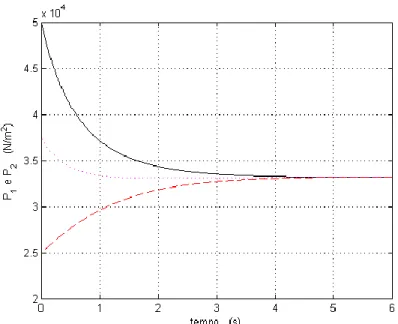
A Fig. (4) mostra o comportamento das pressões internas dentro de cada tanque. Assim como as alturas, elas tendem a ser iguais para o tempo pouco menor que 4 segundos.
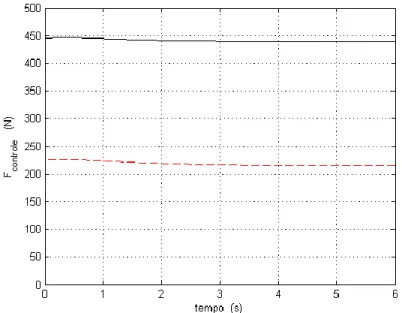
A Fig. (5) mostra o comportamento da área do orifício no fundo de cada tanque. O orifício no tanque 1 tende a 80% do valor da área da seção transversal do cilindro, enquanto o orifício do tanque 2 tende a 40% deste mesmo valor. As forças de controle são representadas na Fig. (6) e apresentam uma pequena variação durante toda a simulação numérica.
Figura 4. Variação das pressões acima da coluna de propelente líquido. Linha contínua para o tanque 1 e linha tracejada para o tanque 2. A linha pontilhada magenta
indica a média dos valores das pressões ao longo do tempo.
Figura 5. Variação das áreas dos orifícios no fundo de cada tanque. Linha contínua para
Figura 6. Força de controle em cada tanque. Linha contínua referente ao tanque 1 e linha tracejada referente ao tanque 2
Segundo caso: simulação do sistema em propulsão
A simulação numérica é feita na situação em que os tanques estão atuando na propulsão. Nesta condição, a tubulação que permite que o líquido de um escoe para o outro está fechada. Os tanques só escoam líquido para a tubulação de propulsão, que recebe o propelente dos dois tanques ao mesmo tempo.
Se os dois tanques são responsáveis pela propulsão e atuam em conjunto, a vazão total necessária para ocorrer a propulsão será a soma das vazões de cada tanque independente. Logo, em cada tanque a vazão de saída deverá ser metade da vazão total.
A falha é caracterizada, nesta abordagem, pela ausência completa de vazão em um dos tanques, enquanto o outro continua funcionando normalmente. Para não afetar a propulsão, essa falha deve ser corrigida de imediato, fazendo com que o tanque ainda operante supra a falha no outro. Neste caso, o tanque restante deve então ter sua vazão de saída igual à vazão total em vez de metade deste valor.
Antes de ocorrer a falha em um dos tanques, o valor de referência da vazão de saída de cada tanque é igual à vazão total dividido por dois. A altura
de referência do propelente em cada um dos tanques está atrelada a esse resultado para a vazão, como mostra a Eq. (28).
T ref1 ref1 1 Q H (t) t H (0) 2A (28)
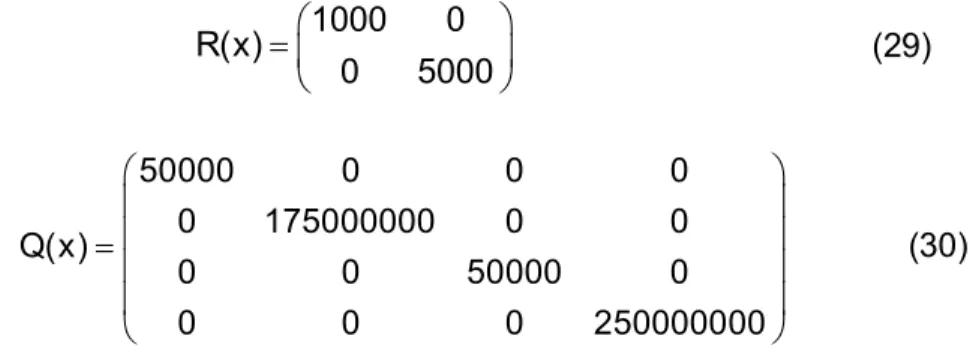
Como agora os tanques não têm mais conexão interna, há o desacoplamento dos mesmos. Este desacoplamento é responsável por fazer a matriz R(x), neste caso, assumir valores diferentes de zero somente em sua diagonal, como mostra a Eq. (29). A Eq. (30) mostra a matriz Q(x) para este caso. R(x) 1000 0 0 5000 (29) 50000 0 0 0 0 175000000 0 0 Q(x) 0 0 50000 0 0 0 0 250000000 (30)
Os parâmetros constantes do sistema são os mesmos da simulação numérica anterior, portanto são os mesmos mostrados na Tabela 2. A Tabela 4 mostra as condições iniciais utilizadas na simulação numérica do sistema com falha na propulsão.
Tabela 4: Condições iniciais simuladas para o segundo caso
Parâmetro Tanque 1 Tanque 2
Área do orifício (m²) 0.009 0.009
Altura da coluna de líquido (m) 2 2
Vazão do líquido (m³/s) 0.1 0.1
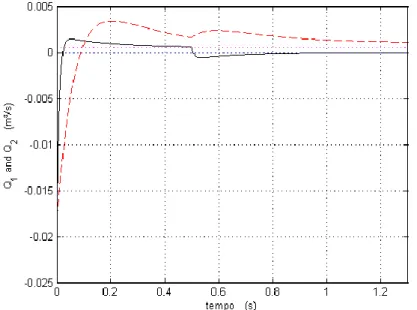
A Fig. (7) mostra o comportamento da vazão em cada tanque. Nesta simulação numérica, a falha é colocada a partir do tempo igual a 0,5 segundos; isso significa que neste momento as referências de vazão e altura de propelente mudam nos tanques. Considerando que o tanque 1 sofreu uma falha, sua vazão de referência vai a zero e sua altura de referência se mantém
constante no valor em que ela estava imediatamente antes de 0,5 segundos. Em compensação, o tanque 2 muda sua referência de vazão para o valor total da propulsão em vez de metade deste valor, e sua altura de referência é recalculada com o novo valor da vazão. Depois da falha, o tanque 1 tende a um valor nulo de vazão e o tanque 2 tende a 0,001 m³/s, valor da propulsão total, o que mostra que o controle está atuando.
Figura 7. Vazões em ambos os tanques com falha no tanque 1. Linha sólida representa a vazão no tanque 1 e a linha sólida vermelha representa a vazão no tanque 2.
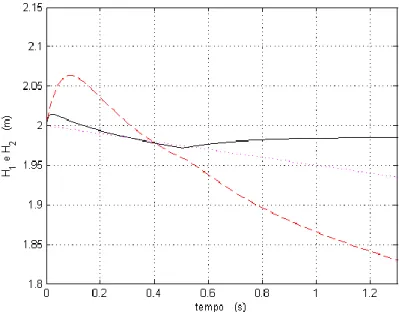
As alturas de ambos os tanques parecem mostrar resultados esperados para o comportamento deles, como mostrado na Fig. (8.a): para o tempo após a falha, a altura do tanque 1 se mantém a mesma e a altura do tanque 2 continua descendo com uma taxa de variação maior do que antes da falha, o que é previsto para manter a propulsão constante.
A Fig, (8.b) mostra a mesma simulação numérica feita para um intervalo maior de tempo. É possível notar então que o tanque 2 tende a esvaziar seu conteúdo, enquanto o tanque 1, sem vazão, tende a manter a mesma altura de propelente dentro tanque.
Figura 8.a. Alturas dos líquidos em cada tanque. Linha sólida para altura no tanque 1 e linha tracejada para o tanque 2.
Figura 8.b. Alturas dos líquidos em cada tanque para tempo de simulação de 18 segundos. Linha sólida para altura no tanque 1 e linha tracejada para o tanque 2.
As pressões se comportam de forma similar às alturas: depois da falha, uma se mantém constante (pois está associada à altura constante) e a outra cai com uma taxa de variação maior, como mostrado na Fig. (9).
Figura 9. Pressões dentro de cada tanque. Linha sólida representa a pressão no tanque 1 e a linha tracejada a pressão no tanque 2
As forças de controle são mostradas na Fig, (10). A variação da força de controle no segundo tanque é maior, pois tende a compensar a falha na vazão do tanque 1.
Figura 10. Forças de controle para cada tanque. Linha sólida representa a força de controle do tanque 1 e a linha tracejada a força de controle no tanque 2
As áreas dos orifícios em cada tanque são mostradas na Fig. (11). A variação desta área no tanque 1 é menor do que no tanque 2, também devido à falha.
Figura 11. Áreas dos orifícios no fundo de cada tanque. Linha sólida azul representa a área do orifício do tanque 1 e a linha tracejada vermelha do tanque 2. A
linha sólida magenta representa a área transversal do tanque.
Figura 12. Vazão total de saída. Linha tracejada indica o valor que a curva sólida deve tender ao longo do tempo
Por fim, o gráfico da Fig. (25) mostra o valor da vazão de saída na propulsão ao longo do tempo. Apesar da falha no primeiro tanque, o controle consegue manter praticamente constante o valor da vazão na propulsão, cumprindo, assim, seu objetivo satisfatoriamente.
7. Conclusões
Sistemas contendo múltiplos tanques em aplicações aeroespaciais, por exemplo, necessitam de distribuição uniforme da massa em seu interior. Uma forma de garantir essa condição é proposta: o controle do fluxo de líquido entre os tanques. Essa operação de redistribuição das massas em cada tanque requer um controle específico e, devido ao caráter fortemente não linear das equações governantes, a lei de controle SDRE foi proposta. Este controle age diretamente na variação do diâmetro do orifício no fundo de ambos os tanques. As equações governantes com a lei de controle foram integradas numericamente utilizando o integrador Runge-Kutta de quarta ordem. Duas condições foram investigadas. A primeira condição envolve a redistribuição de combustível (quando os tanques estão conectados internamente). A segunda condição envolve a fase de propulsão com falha de operação em um dos tanques.
Os resultados da simulação sem falhas na operação mostram que o controle atua de forma esperada, fazendo os taques voltarem a ter a mesma massa. É importante ressaltar que, devido à diferença nos valores das pressões acima da coluna de propelente líquido em cada tanque, quando ambos estão com valores de massas diferentes, o sistema naturalmente tenderia a redistribuir as massas igualmente. Apesar disso, a necessidade de se controlar essa operação ainda é destacada, pois é possível dessa forma manipular o tempo de operação deste processo.
Os resultados do controle atuando na propulsão com falhas na operação mostram que a força de controle tende a manter todos os parâmetros do sistema (vazões, alturas da coluna de propelente líquido, pressões) convergindo para os resultados esperados. Portanto, mesmo quando um dos tanques tem sua vazão anulada, o outro consegue compensar a propulsão, mantendo-a constante.
8. Agradecimentos
Este projeto foi financiado pelo Programa de Iniciação Científica da UFABC (processo 23006.000566/2015-71).
Referências
[1] HARLAND, D.; LORENZ, R. Space Systems Failures: Disasters and Rescues of Satellites, Rocket and Space Probes. 1. ed. Berlin: Springer, 2005.
[2] EUROPEAN SPACE AGENCY. Solid and Liquid Fuel. Disponível em: <http://www.esa.int/Education/Solid_and_liquid_fuel_rockets4>. Acesso em: 05/08/2016.
[3] EUROPEAN SPACE AGENCY. One Day Soon. Disponível em:
<http://esamultimedia.esa.int/docs/edu/SpaceBasics/SpaceBasics_propulsion.pdf> Acesso em: 05/08/2016.
[4] ÇIMEN, Tayfun. State-Dependent Riccati Equation (SDRE) control: a survey. IFAC Proceedings Volumes, Seoul, v. 41, n. 2, p. 3761-3775, 2008.
[5] CABRAL, T. D. F.; ROBERTO, C. F. Análise de estabilidade e projeto de controle pelo método SDRE para um sistema maglev simplificado. In: CONGRESSO
NACIONAL DE MATEMÁTICA APLICADA À INDÚSTRIA, 1.,São Paulo,2015. Anais… São Paulo: Blucher, 2015. p. 131-138
[6] FOX, R.; PRITCHARD, P.; MCDONALD, A. Fox and McDonald's Introduction to Fluid Mechanics. 1. ed. Hoboken: John Wiley & Sons, Inc., 2011.
[7] DORF, R.; BISHOP, R. Modern Control Systems. 11. ed. Beijing: Science Press, 2007.
[8] CÔTÉ, S. et al. Anik E Spacecraft Life Extension. Space OPS 2004 Conference, Montreal, 2004.
[9] RODRIGUES, V. S.; FENILI, A., Controle de vazão em um tanque: modelagem matemática e comparação entre técnicas de controle linear e não linear. In: Proceedings of the XXXIV IBERIAN LATIN-AMERICAN CONGRESS ON COMPUTATIONAL METHODS IN ENGINEERING, Pirenópolis, 2013. Anais… Pirenópolis: ABMEC,2013.
[10] ATKINS, P. W.; PAULA, J. D. Atkins' Physical Chemistry. Oxford: Oxford University Press, 2006.
[11] SHAMMA, J.; CLOUTIER, J. Existence of SDRE stabilizing feedback. IEEE Transactions On Automatic Control, v. 48, n. 3, p. 513-517, 2003.