CAPÍTULO SEGUNDO
SDH - REDE DE SINCRONISMO
Medidas básicas e terminologia em sincronização (G.810 do ITU – T)
Definições gerais
9 Jitter: Variações de fase de um sinal digital com relação a sua posição ideal, em curtos períodos de tempo, freqüência maior ou igual a 10 Hz.
9 Distúrbio de freqüência: Diferença de longa duração entre o valor real da freqüência de um sinal digital e sua freqüência ideal.
9 MTIE (erro máximo de intervalo de tempo): É definido como o máximo desvio no tempo de um sinal em relação a uma referencia de relógio dentro de um intervalo de observação especificado.
9 Network Sinchronisation (sincronização de rede): Conceito genérico que descreve a forma de distribuição de um sinal de sincronização comum para todos os elementos de rede.
9 Single ended Sinchronisation (Sincronização Single ended): Método para sincronizar um nó especificado com relação a outro nó de forma que o sinal de sincronização gerado é derivado da diferença de fase entre o clock local e o sinal digital de entrada recebido do outro nó.
9 Sinchronisation Chain (cadeia de sincronização): Interconexão entre nós e enlaces de sincronização.
9 Sinchronisation Reference Chain (cadeia de referência de sincronização): Cadeia de sincronização definida na G.803 ou ETS 300462-2 para formar a base para simulações de Jitter e Wander na rede de sincronização.
9 Slip: A repetição ou apagamento de um bloco de bits em um fluxo de bits síncrono ou plesiócrono devido à discrepância das taxas de leitura e escrita de um buffer.
9 Standard Frequency: Freqüência que guarda uma referência conhecida com um determinado padrão.
9 TDEV: TDEV é uma medida do desvio de um sinal digital como função do tempo de integração e provê o conteúdo espectral de Wander.
9 Time (hora): Quando usado para descrever redes de sincronização, referem-se a sinais de freqüência usados para sincronização ou medição.
9 UTC – Universal Time Coordenated (coordenador de tempo universal): Escala de tempo, mantida pelo Bureau Internacional de pesos e medidas (BIPM) e pelo International Earth Rotation Service (IERS), base para calibração dos relógios de césio.
9 Wander: Variações de fase de um sinal digital com relação a sua posição ideal, em longos períodos de tempo (freqüência menor ou igual a 10 Hz).
Definições relacionadas a equipamentos de clock
9 Clock ou Relógio: Gerador de freqüências que será usado para sincronizar a rede.
9 Frequency Standard (padrão de freqüência): Gerador cuja saída é usada como freqüência de referência.
9 Master Clock: Gerador que produzem sinal de freqüência que será usado para controlar outros geradores.
9 Node Clock (nó de Relógio); Nó de distribuição de clock para um ou mais equipamentos sincronizados.
9 Slave Clock: Um clock cuja sincronização é chaveada por um sinal de sincronização de referência recebido de um clock com mais qualidade.
9 Stand Alone Sinchronisation Equipament (SASE) (equipamento de sincronização independente): Equipamento independente com implementação da função SSU lógica, que incorpora sua própria função de gerenciamento.
9 Sinchronisation Supply Unit (SSU) (unidade de provisionamento de sincronização): Função lógica para seleção, processamento e distribuição de freqüência de referência, com as características de freqüência definidas na G.812.
Definições relacionadas às redes de sincronização
9 Asynchronous Mode (modo assíncrono): Modo no quais os clocks operam no modo de execução livre.
9 Local Node (no local) Nó de rede síncrono que efetua a interface diretamente como equipamento do cliente.
9 Master Slave Mode (modo mestre-escravo): Modo no qual um clock mestre designado é usado como padrão de freqüência que é disseminado para todos os outros clocks da rede.
9 Plesiochronous Mode (modo plesiócrono); Modo no qual cada elemento da rede estaria operando com a mesma freqüência nominal, obedecendo aos limites especificados de variação de freqüência.
9 Pseudo-synchronous Mode (modo pseudo-síncrono): Modo no qual todos os clocks possuem a mesma precisão de freqüência de longa duração, de acordo com um clock de referência primária, conforme especificado na G.811, em condições normais de operação.
9 Sinchronisation Element (elemento de sincronização): Elemento que fornece serviços de sincronização para os demais elementos da rede, inclui clocks com qualidade de acordo com G.811, G.812 e G.813.
9 Sinchronisation Link (enlace de sincronização): Enlace entre dois nós através do qual a sincronização é transmitida.
9 Synchronous Network (rede síncrona): Rede na qual todos os clocks possuem a mesma precisão de longa duração em condições normais de operação.
9 Sinchronisation Network (rede de sincronização): Rede para distribuição dos sinais de sincronismo, compreende os nós da rede de sincronização conectados por links de sincronização.
9 Sinchronisation Network Node (nó de rede de sincronização): Grupo de equipamentos em uma localização física única que estão diretamente sincronizados pelo clock do nó.
Obs: Uma posição física pode conter mais de um nó de rede de sincronização.
9 Sinchronisation Sink (destino de sincronização): Destino do sinal de sincronismo em uma trilha de sincronização.
9 Sinchronisation Traceability (rastreabilidade de sincronização)
Uma série de elementos e trilhas de sincronização, normalmente em um domínio de equipamento SDH ou PDH único.
9 Sinchronisation Trail (trilha de sincronização): A conexão completa entre o elemento de sincronização e o elemento de rede ou entre dois elementos da rede.
9 Transit Node (nó de trânsito); Nó de rede síncrona que se interconecta com outros nós e que não está ligada diretamente a equipamentos de usuários.
Definições relacionadas aos modos de operação do clock (aplicável aos clocks escravos)
inicia quando uma saída de clock não mais reflete a influência de uma referência externa conectada, e termina, quando a saída de clock recupera sua conexão com uma referência externa.
9 Holdover Mode (modo Holdover): Uma condição de operação de um clock escravo que perdeu sua entrada de controle e está usando referência de fase armazenada, para controlar sua saída. Os dados armazenados são usados para controle de freqüência, para produzir o desempenho. O Holdover inicia quando a saída de clock não mais reflete o comportamento atual da referência externa ou a transição dela. O Holdover termina quando a saída de clock recupera a condição de modo chaveado.
9 Ideal Operation (operação ideal); Categoria de operação que reflete o desempenho de um clock sob condições ideais.
9 Locked modo (modo chaveado): Condição de operação de um clock escravo na qual o sinal de saída é controlado por uma referência externa, de tal forma que o sinal de saída do clock tem a mesma freqüência média de longa duração. O modo de bloqueio é o modo de operação esperado de um clock escravo.
9 Stressed Operation (operação Stressed): Categoria de operação que reflete o desempenho atual de um clock, considerando o impacto das condições reais de operação, estas condições incluem os efeitos de Jitter, atividade de comutação de proteção e a perda de sinal de sincronização de referência de entrada.
Definições relacionadas à sincronização de clock
9 Frequency Accuracy (precisão de freqüência); A magnitude máxima do desvio de freqüência para um período de tempo especificado.
Obs.: A precisão de freqüência inclui o offset de freqüência inicial e qualquer efeito relativo a envelhecimento e meio ambiente.
9 Drift Frequency (desvio de freqüência); A taxa de alteração do desvio de fração de freqüência de um valor nominal especificado causado por envelhecimento e efeitos externos (radiação, pressão, temperatura, umidade, alimentação, carga, etc.).
Obs.1: Os fatores externos sempre devem ser claramente indicados.
Obs.2: O desvio de freqüência não inclui apenas a taxa de desvio de freqüência linear, mas também qualquer outro desvio de freqüência mais significativo.
9 Frequency Stability (Estabilidade de freqüência); A alteração de freqüência causada espontaneamente e/ou pelo ambiente em um intervalo de tempo fornecido.
9 Timing Signal (sinal de sincronismo): Um sinal periódico, gerado por um clock, usado para sincronizar equipamentos e redes digitais. Devido a fatores inevitáveis, tais como flutuações de fase do oscilador, os sinais atuais de sincronismo são pseudo-periódicos, e os intervalos de tempo entre os instantes de fase iguais sucessivos mostram variações ocasionais.
9 Reference Timing Signal (sinal de sincronização de Referência); Sinal de sincronismo com desempenho especificado, que pode ser usado como fonte de sincronismo para um clock escravo.
9 Time Interval Error Function (função de erro de intervalo de tempo); A diferença entre a medição de um intervalo de tempo fornecido por um clock e a medição deste mesmo intervalo de tempo fornecido por um clock de referência.
Necessidade de sincronização
A maioria das redes de comunicação digital está baseada em sinais codificados em PCM (pulse code modulation). A multiplexação é feita no domínio do tempo através do arranjo dos sinais básicos 64Kbits/s em time slots relativos a um sinal de referência (quadro).
A comutação é feita em uma combinação de comutação espacial e comutação temporal (troca de time slots). A comutação ou multiplexação no domínio do tempo requer que os times slots sejam iguais em todos os equipamentos reunindo (assembling), separando (disassembling) ou comutando estes sinais.
O overflow ou underflow periódico destes buffers (equivalente a uma diferença de freqüência) resulta em escorregamentos de quadros regulares que corrompem a integridade do sinal.
Dependendo do tipo de serviço afetado pelos escorregamentos, o impacto pode ser mais ou menos severo, alguns efeitos estão listados a seguir:
Serviço Impacto de escorregamento
Voz Possível ‘click’, com perda de dados de sinalização (CCS7).
Fax Deleção de 4 a 8 linhas de scan (tempo de transmissão aumentado)
Multimídia Quadros de vídeo congelados por alguns segundos, burst de ruído de áudio. Texto Criptografado O código deve ser retransmitido
Dados Digitais Deleção ou repetição de dados, redução de throughput
Dados na faixa de voz Erros de transmissão para 0,01 a 2 seg., a chamada pode ser desconectada.
A fim de manter a quantidade de escorregamento baixa, a exatidão e estabilidade destes sinais de sincronismo devem ser bem altas. O valor de exatidão de +/-1*10-11não é atingido com osciladores convencionais nos equipamentos. Portanto, um clock atômico com a exatidão necessária é usado na rede e o sinal de referência gerado por este clock é distribuído por toda a rede.
Nos elementos de rede, os osciladores são chaveados (phase locked) para o sinal de referência recebido pela rede de transporte. Este método, considerado como um método mestre-escravo é atualmente o método de sincronização de rede mais utilizado.
A exigência essencial (com respeito à sincronização de rede) para uma rede de transporte é a capacidade de transportar sinais de referência para a sincronização.
A inevitável degradação do sinal transportado devido à Jitter e Wander deve estar dentro dos limites especificados na G.823 e G.825.
Sincronização nas redes PDH
Características das redes PDH (foco na sincronização)
As redes PDH consistem de centrais de comutação, comutando sinais digitais de 64 Kbits/s e uma rede de trans porte interconectando estas centrais. A rede de transporte é uma rede complexa de conexões ponto-a-ponto.
Transporte
1. O sinal de transporte básico entre centrais é de 2048 Kbits/s (G.703) com estrutura PCM30.
2. O equipamento periférico está conectado aos comutadores através de sinais de 2048Kbits/s ou 64Kbits/s.
3. Os sinais de transporte de ordem superior (8448 Kbits/s, 34368 Kbits/s, 139264 Kbits/s) são gerados através da multiplexação de sinais do nível inferior. A sincronização deste quadro não é derivada do nível de 2048 Kbits/s, é gerado localmente a partir da freqüência do oscilador interno do comutador de alta ordem.
4. Os sinais de transporte PDH acima de 2048 Kbits/s não são síncronos para o nível de 2048 Kbits/s. 5. A adaptação da freqüência dos sinais tributários para o sinal (multiplexado) agregado é feita através de
bits de enchimento.
6. Devido a este método, a freqüência de cada um dos sinais tributários pode ser recuperada no demultiplexador através da retirada dos bits de enchimento e filtragem dos sinais demultiplexados para reduzir o stuffing Jitter. A freqüência e a magnitude dos eventos de stuffing permitem uma fácil filtragem. O transporte PDH é transparente ao clock-freqüência.
Aspectos de Sincronização de Rede
1. Originado de um PRC, a sincronização é distribuída hierarquicamente, usando o método mestre-escravo.
2. O transporte de informação de sincronização é feito no nível de 2048 Kbits/s.
3. A sincronização existe apenas no nível de 2048 Kbits/s. Se necessário, os sinais de 64 Kbits/s multiplexados no nível de 2048 Kbits/s (sinal PCM30) são adaptados à freqüência através de escorregamentos de bytes.
9 O quadro mais significativo é gerado por um multiplexador cujo oscilador interno é controlado por um sinal de referência externa derivado do nível de 2048 Kbits/s.
9 É usado um sinal PDH assíncrono (taxa de bits de PDH com estrutura de quadro de 125 µs) de acordo como o ETSI ETS 300337.
5. Os caminhos de sincronização alternativos estão facilmente disponíveis, de tal forma que a sincronização pode ser distribuída para cada comutador em dois ou mais caminhos independentes, determinados durante o planejamento da rede. Estes sinais de sincronização pré-selecionados são ordenados em uma lista de prioridades. No caso de uma falha no sinal de referência, o sinal imediatamente com o nível de prioridade mais baixo será selecionado como um sinal de referência ativa.
6. O alto nível de complexidade também permite uma distribuição hierárquica plana.
Características das redes SDH (foco na sincronização)
A rede SDH interconectando centrais de comutação. A rede de transporte é uma rede complexa de conexões ponto-a-ponto.
Transporte
1. O sinal de transporte básico é o sinal STM-1 com taxa de bits de 155,52 Mbits/s.
2. O payload é transportado em conteiners síncronos. Vários tamanhos de conteiners estão disponíveis. A posição dos conteiners no quadro STM-N não é fixa. Os ponteiros indicam as posições dos conteiners relativos ao quadro. Se o sincronismo for perturbado ou ocorrerem variações de fases significativas do contêiner, o mesmo poderá flutuar dentro do quadro. Devido à estrutura em byte do sinal, o contêiner só pode ser mudado em passos (um ou três bytes). Quando o container muda de posição dentro do quadro, o ponteiro associado deverá ser ajustado (PJE: evento de justificativa de ponteiro).
3. Os sinais de transporte de ordem superior (STM-N) são gerados através da multiplexação de bytes de sinais de nível inferior (STM-M com M<N). As taxas de bits dos sinais de ordem superior são inteiros múltiplos da taxa de bits do STM-1.
4. Os sinais de transporte SDH de ordem superior (STM-N) são síncronos para os sinais de ordem inferior.
Aspectos da Rede de Sincronização
1. Originária de um PRC, a sincronização é distribuída hierarquicamente, usando o método mestre-escravo. 2. O transporte de informação de sincronização é feito no nível STM-N.
3. O sincronismo existe em todos os níveis de sinalização (níveis STM-N).
4. Como mencionado anteriormente, os sinais PDH mais significativos (acima de 2048Kbits/s) não são sincronizados para o nível de 2048 Kbits/s, portanto, estes sinais normalmente não são apropriados como sinais de referência. Exceções usadas raramente:
9 O quadro mais significativo é gerado por um multiplexador cujo oscilador interno é controlado por um sinal de referência externa derivado do nível de 2048 Kbits/s.
9 É usado um sinal PDH assíncrono (taxa de bits de PDH com estrutura de quadro de 125 µs) de acordo como o ETSI / ETS 300337.
Sinais de transporte
Os sinais de transporte SDH (sinais STM-N) consistem em um quadro síncrono para a freqüência de referência de rede e containers multiplexados, que são sincronizados ao quadro.
As variações de freqüência e de fase entre os quadros e os containers ou entre os containers de ordem superior e containers de ordem inferior, são ajustados com técnicas de justificação de ponteiro.
Os sinais PDH são mapeados (sincronizados) em containers apropriados por justificação de bits.
Os ajustes de indicação (ponteiro) durante o transporte através de uma rede SDH causam os jumps de fase nos sinais transportados. Estes jumps de fase não degradam o transporte e a reinicialização do payload, mas degradam os sinais de payload transportados que, portanto, tornam-se inadequados para sincronização, mais especificamente no caso de sinais de 2 Mbit/s.
Funcionalidades de seleção de referencia dos elementos de rede SDH
Além dos sinais recebidos de um elemento de rede SDH (por ex.: um multiplexador ou equipamento terminal de linha), para o processamento de sinais internos, um sinal é selecionado como referência para o clock do sistema, um segundo sinal é selecionado independentemente para um sinal de saída de referência que pode ser usado por outro equipamento. A seleção dos sinais é baseada em uma tabela de prioridades e na qualidade da informação transportada nos sinais SDH (conforme as mensagens de estado de sincronização).
Mensagens de estado de sincronização
Um (meio) byte nos sinais STM-N é reservado para mensagens relacionadas à sincronização de transporte. Estas mensagens contêm uma informação sobre o nível de qualidade do sinal de clock que foi usado para gerar o sinal STM-N. Uma mensagem importante é a “Do not use for synchronizatiom” que significa: não usar para sincronização, que é usada para evitar loops de sincronização.
Mecanismo de reconfiguração automática
Com as funcionalidades dos elementos de rede SDH, podem ser criados subredes de sincronização de auto-recuperação. As subredes apropriadas são por ex.: cadeias ou anéis de multiplicação Add/Drop. Se ocorrer uma falha no fluxo normal de sincronização, uma cadeia de sincronização alternativa é estabelecida, alimentando os elementos de rede do segmento para frente do ponto de falha.
Tipos de clock nas redes de sincronização de SDH
Como mencionado anteriormente, os comutadores nas redes digitais de comunicações nas quais a multiplexação por divisão de tempo é aplicada, necessitam de uma referência de sincronismo comum. Os requisitos de precisão e estabilidade são necessários para se obter características de qualidade o desempenho (medidas em termos de taxa de slip) de uma conexão digital, especificada pelo ITU-T Rec. G.822. Atualmente estas necessidades somente podem ser atendidas com clocks de átomo (feixe de césio) usados como clock de referência de rede (PRC: clock de referência primária).
A tarefa de sincronização de rede é distribuir o sinal de referência do PRC para todos os elementos da rede que necessitam sincronização.
O método para propagar o sinal de referência na rede é o mestre-escravo. A figura 1 mostra uma cadeia de clocks mestre-escravo conectados (cadeia de referência de sincronização de [G.803]).
Figura 1 – Cadeia de referência de sincronismo
Uma cadeia mestre-escravo sincronizada pode ser decomposta em cadeias menores de referência. Várias classes de clocks escravos com diferentes propriedades e diferentes regras aparecem na rede:
9 O PRC determina a fonte de relógio primária, possui o melhor nível de estabilidade;
9 As SSUs (unidades de distribuição de sincronização) geram o sinal de clock depois de passar por uma cadeia de SECs e servem como referência temporária para partes da rede, quando a conexão para o PRC estiver sido perdida em situações de falha. Geralmente as SSUs estão localizadas nos nós da rede, onde distribuem um sinal de sincronismo para todos os elementos de rede no nó;
9 Os SECs (clocks do equipamento SDH) são os clocks incorporados aos elementos de rede SDH. Os SECs oferecem grande flexibilidade na seleção de referências e mecanismos de reconfiguração automática de suporte nos anéis ou cadeias dos elementos de rede SDH;
9 Os RTGs (gerador de sincronismo do regenerador) não aparecem na cadeia de referência, porque devido à sua arquitetura simples e suas propriedades intrínsecas, sua influência na cadeia de sincronização não é significativa.
PRC (clock de referência primária)
O mecanismo apenas de desgaste (wear-out) é o reservatório limitado de césio para o feixe de partículas de átomo.
O limite de vida útil de um tubo de feixes de césio é de 10 anos, dependo do fabricante e do tipo de tubo; dois tipos de PRCs foram desenvolvidos:
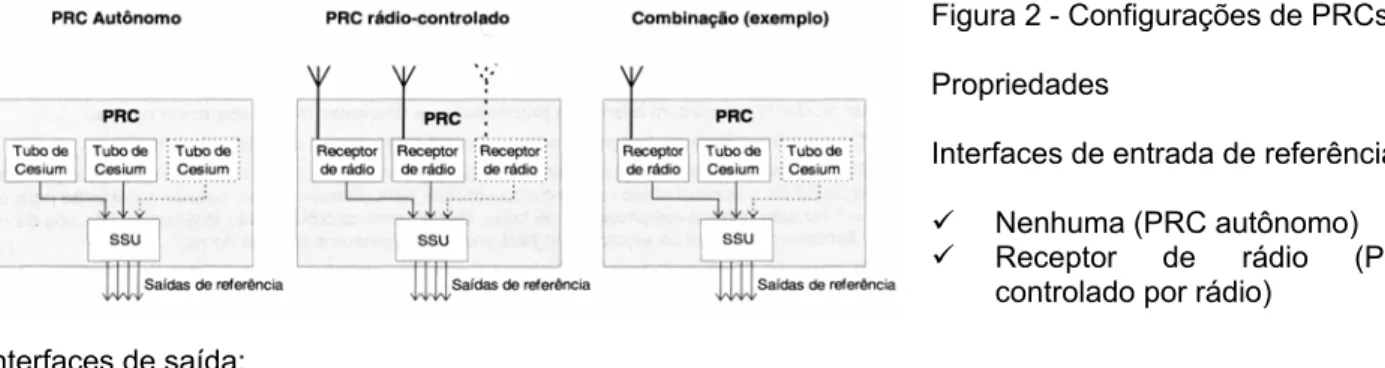
9 PRCs autônomos com um ou vários (até 3) tubos de césio incorporados no PRC;
9 PRCs controlados por rádio que usam tubos de césio remotos, p. ex. nos satélites do sistema de navegação GPS. Neste caso, os sinais de rádio são gerados com base nos tubos de césio, recebidos na locação do PRC e usados como um sinal de referência para uma SSU.
A figura 2 mostra as configurações de PRCs, puramente autônomas, puramente controladas por rádio e um exemplo de uma combinação dos dois métodos que fornecem um alto grau de disponibilidade.
As vantagens, desvantagens e cenários da rede com os diferentes métodos são descritos com mais detalhes na seção (arquitetura de rede de sincronização).
Figura 2 - Configurações de PRCs.
Propriedades
Interfaces de entrada de referência:
9 Nenhuma (PRC autônomo) 9 Receptor de rádio (PRC
controlado por rádio)
Interfaces de saída:
9 2,048 MHz (ITU-T G.703§10),
9 HDB3 de 2048 bit/s codificado (G.703§6)
9 outras interfaces de saída disponíveis, mas não usadas nas redes de sincronização SDH
Propriedades básicas:
9 Precisão de Freerun: 1x10-11
Referências normativas:
9 ITU-T Rec. G.811: necessidades de sincronização nas saídas dos clocks de referência primária apropriadas para operação plesiócrona de enlaces digitais internacionais.
9 ETSI DE/TM-03017-6 : características de sincronismo de clocks de referência primária
SSU (Unidade distribuidora de sincronização)
As SSUs são o segundo nível na hierarquia de qualidade do equipamento de sincronização. As tarefas importantes das SSUs são:
9 seleção de um sinal de referência vindo do PRC. Tipicamente dois ou três sinais são roteados para a SSU através de diferentes vias na rede;
9 supervisão do sinal de referência (ativo) selecionado. Os sinais de referência não ativos também devem ser supervisionados, de tal forma que haverá um sinal de referência em reserva ativa válido se for necessária uma comutação;
9 captura (holdover), i.e. manter a freqüência de saída por um período de tempo (alguns dias) quando todas as entradas de referência falharem. Neste caso, a SSU serve como um clock de referência para uma parte da rede;
9 filtrar o jitter e o wander acumulados na via de transmissão e os clocks na cadeia mestre-escravo.
As SSUs podem ser incorporadas no equipamento de transmissão ou comutação (Comutadores digitais ou cross-conects digitais), ou ainda, um equipamento independente (SASE: equipamento de sincronização independente).
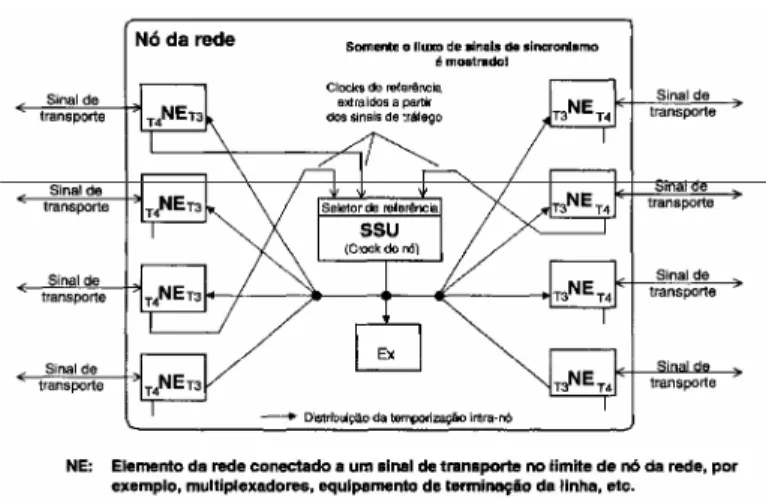
Os elementos de rede (NEs) conectados à rede retiram um sinal de referência de sincronização dos sinais de transporte apropriados e fazem a distribuição através da saída T4 para o clock do nó. Propriedades:
Fig. 3 - Ambiente da SSU.
Interfaces de entrada de referência:
9 2048 kHz (ITU-TG.703§10);
9 2048 kbit/s codificado em HDB3 (G.703§6);
9 avaliação e processamento da mensagem de estado se a sincronização em sinais PDH (especificado em ITU-T Rec. G.704) for implementada apenas em produtos desenvolvidos recentemente;
9 outras interfaces de entrada estão disponíveis mas não usadas nas redes de sincronização SDH.
Interfaces de saída:
9 2048 kHz (ITU-T G.703§10);
9 2048 kbit/s codificado em HDB3 (G.703§6); a geração de mensagens de estado de sincronização em sinais PDH (especificados em ITU-T Rec. G.704) é implementada apenas em produtos desenvolvidos recentemente;
9 outras interfaces de saída estão disponíveis mas não são usadas nas redes de sincronização SDH.
Propriedades básicas:
9 Exatidão de Freerun: 5x10-8
... 3x10-7/vida útil (típica, não padronizada) 9 Holdover por dia: (5x10-10
)/passo + (2x10-10)/dia (para envelhecimento)
Referências normativas:
9 ITU-T Rec. G.812: solicitações de sincronização nas saídas dos clocks escravos apropriados para a operação plesiócrona dos enlaces digitais internacionais.
Obs.:
9 existem dois tipos de clock definidos em G.812 : G.812T e G.812L. A qualidade da G.812L é aproximadamente um nível abaixo da G.812T. Os clocks de G.812L raramente são usados em redes SDH, assim comumente em redes SDH, G.812 significa G.812T;
9 G.812 foi revisado (1997) e novos tipos de clocks foram especificados. A nova recomendação é 'Necessidades de sincronização de clocks escravos apropriados para uso como clocks de nó em redes de sincronização (Timing requirements of slave clocks suitable for use as node clocks in sincronização networks)’. ETSI prETS 300462-4 (anteriormente DE/TM 3017-4): características de sincronização de clocks escravos apropriados para alimentação de sincronização para equipamentos SDH e PDH.
SETS (fonte de sincronização de equipamentos síncronos), SEC (clock de equipamento SDH)
Quando o ITU-T (CCITT) especificou os blocos funcionais para equipamentos SDH, recomendação G.783, a fonte de sincronização foi designada MTS (fonte de sincronização multiplexadora). O último ITU-T alterou o nome da fonte de sincronização para SETS porque o uso não estava restrito a muitipiexadores. O circuito em blocos de um SETS é mostrado na figura 4.
Fig. 4 - Circuito em blocos de um SETS (de acordo com ITU) e um SEC (de acordo com. ETSI)
agora (ETS 300462-2) um subconjunto de SETS. As características elétricas de SETSs e SECs são idênticas para a saída TO; durante os processos de padronização, os termos SETS (e MTS) e SEC foram usados equivalentemente por algum tempo, os quais ainda valem em alguns documentos.
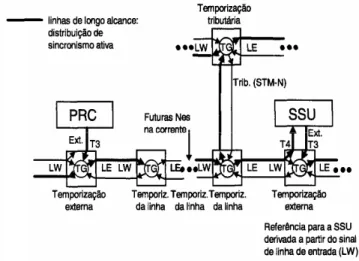
O SETS não é diretamente conectado para os sinais de entrada e de saída do elemento de rede, mas através de interfaces de linha ou interfaces de sincronização específicas. A figura 5 mostra o circuito em blocos de um elemento de rede SDH típico. Para esclarecer, as interfaces PDH e conseqüentemente os sinais de referência T2 para SETS foram omitidos e as interfaces são mostradas separadamente para os sinais de entrada e de saída. Propriedades:
Fig. 5 - Ambiente de SETS
Aplicação típica:
9 clock de multiplexadores síncronos e
equipamentos de linha
Sinais de entrada de referência:
9 T1, derivado de: STM-N [G.707]
34368 kbit/s com estrutura de quadro de 125us 139264 kbit/s com estrutura de quadro de 125us
9 T2, derivado de: 2048 kbit/s [G.703]§6 9 T3, derivado de:
2048 kHz [G.703]§10
2048 kbit/s [G.703]§6 com SSM de acordo com [G.704]
Sinais de saída:
9 T4: sinal de referência externa,
2048 kHz [G.703]§10 (após interface física)
2048 kbit/s [G.703]§6 com SSM de acordo com [G.704] (após interface física)
Obs: a aplicação principal dos sinais de 2048 kbit/s com SSM é a troca de informações sobre o estado de sincronização entre uma SSU e elementos de rede.
9 T0: sinais de sincronização para o processamento de sinais internos do equipamento e para gerar sinais de linha SDH de saída: as freqüências são específicas da implementação.
Propriedades básicas:
9 Precisão de Freerun: (4.6x10-6
) 9 Holdover por dia: (5x10-8
) offset inicial + (2x10-6)/(temperatura) + (1x10-8)/dia (envelhecimento)
Referências normativas:
9 ITU-T Rec. G.813 (anteriormente G.81s): necessidades de sincronização de clocks escravos de equipamentos SDH (SEC)
9 ETSI DE/TM-03017-5: características de sincronização de clocks escravos apropriados para a operação em equipamentos SDH.
Modos de sincronização
O SETS (fonte de sincronização de equipamento síncrono oferece várias opções de sincronização. A seleção de fontes de referência para o gerador de sincronização interna (SETG) e, independentemente, para a saída de referência externa (T4) permite a adaptação flexível para as necessidades da distribuição de sincronização na rede.
um elemento de rede com um SETS:
Linhas largas indicam o fluxo de sincronização (sinais atualmente em uso para sincronização).
Características comuns para todos os modos de sincronização:
9 Os sinais STM-N de saída em todas as portas, incluindo a porta de referência selecionada, são sincronizados a partir do TG, baseados no sinal de referência selecionado. A fim de evitar loops de sincronização entre os elementos de rede vizinhos, é usado o SSM nos sinais STM-N.
9 Os sinais PDH de saída em portas tributárias PDH geralmente não são sincronizados a partir do TG. Uma exceção são os sinais de 2 Mbit/s retemporizados para fins de sincronização.
9 Um equipamento com uma função SETS (que pode ser fisicamente duplicado para fins de segurança) pode ser operado nos seguintes modos:
Sincronização de linha
9 O sinal de referência para o TG é derivado do sinal da linha oeste ou da linha leste.
Obs.: O sinal de saída na porta LW (neste exemplo) é identificado com SSM 'não usar para sincronização (do not use for sync)' para evitar loops de sincronização.
9 Aplicação: modo de sincronização normal de elementos de rede em cadeia ou anéis.
Sincronização tributária
9 O sinal de referência para o TG é derivado de uma porta tributária que pode ser um sinal STM-N ou um sinal PDH.
9 Se for usado um tributário PDH, o sinal deverá preencher os requisitos para o jitter de entrada e tolerância wander especificada em [G.813], que são mais rigorosos que os requisitos para os sinais PDH não utilizados para fins de sincronização.
9 Geralmente os sinais PDH de saída não são sincronizados pelo TG (exceção: nova sincronização).
Sincronização externa
9 O elemento de rede usa um sinal de referência externa dedicado para sincronização (sem tráfego). Tipos de sinais: 2048 kHz ou 2048 kbit/s. 9 Aplicação: Distribuição de sincronização de clocks mais significativos (p.
ex. PRCs ou SSUs) para elementos da rede ou diretamente entre os elementos da rede em um nó da rede.
Sincronização interna
9 O clock do elementos de rede não é chaveado para uma sinal de referência. A sincronização interna compreende os modos Freerun e holdover.
9 Os elementos de rede em execução livre não são liberados nas redes síncronas.
9 O modo holdover é introduzido quando a fonte de referência falhar e nenhuma alternativa apropriada estiver disponível. O elemento de rede deve retornar para a operação chaveada, assim que possível, p. ex. com mecanismos automáticos de reconfiguração.
Outros modos de sincronização
Alguns dos vários outros modos de sincronização que são possíveis com funções de equipamentos não-padrão estão listados a seguir:
Through timing requer dois geradores de sincronização independentes no elemento da rede. A sincronização para o sinal da linha de saída oeste é derivado do sinal da linha de entrada leste e vice-versa.
Um dos geradores de sincronização é usado para o processamento de sinais internos.
Em cadeias de elementos de rede suportando through timing, dois sinais de referência independentes estão disponíveis em cada elemento de rede da cadeia. No caso de uma falha (simples) de linha, sempre existe um segundo sinal de referência sem processo de reconfiguração na cadeia.
Sincronização de loop (two-sided loop timing)
A sincronização de loop requer dois geradores de sincronização independentes no elemento da rede. A sincronização para o sinal da linha de saída oeste é derivado do sinal da linha de entrada oeste e vice-versa. Um dos geradores de sincronização é usado para o processamento de sinais internos. A sincronização de loop permite manter uma sincronização separada em uma das linhas de entrada. A aplicação é rara.
Exemplos para modos de sincronização
A figura 6 mostra os modos de sincronização mais importantes. A parte inferior é a cadeia de elementos de rede operada em sincronização por linha. Considerar que a SSU no lado esquerdo não recebe sua referência através da linha de entrada, mas através de alguma via para o PRC. Da mesma forma a sincronização pode ser alimentada para um anel.
Fig. 6 Exemplos de aplicação de modos de sincronização
A partir do elemento de rede conectado à SSU, a sincronização é transportada através de uma cadeia de elementos de rede no modo de sincronização de linha para um elemento de rede conectado a uma SSU.
A conexão tributária-tributária no penúltimo elemento de rede da cadeia mostra um método para a sincronização de transporte para outra subrede, como um pequena cadeia ou um pequeno anel. Quando a sincronização é transferida para subredes maiores, geralmente uma SSU é colocada entre as redes.
RTG (gerador de sincronização do regenerador)
Os RTGs são fontes de sincronização muito simples, a figura 7 mostra sua posição em um regenerador. Na diferença para elementos de rede equipados com uma sincronização de alimentação SETS para todas as funções, o RTG consiste em uma fonte de sincronização separada para cada sentido de um sinal bidirecional, de tal forma que cada sinal mantém a sua sincronização. Em condições normais de trabalho, um RTG recebe um sinal de referência extraído do sinal STM-N de entrada e distribui um sinal de sincronização para as funções de processamento de sinais e para interface de saída. Se um dos sinais STM-N de entrada for perdido, o RTG fornece a sincronização para a geração de um SIA no sentido do fluxo (sinal de indicação de alarme).
Fig. 7 Posição do RTG no circuito em blocos de um regenerador
Devido à grande largura da banda, a contribuição wander dos RTGs é insignificante. Alguns jitter são adicionados ao sinal que é filtrado no próximo SETS.
Apenas em cadeias de regeneradores muito grandes (ordem de magnitude: 50) o jitter é acumulado significativamente. Conseqüentemente, os RTGs podem ser considerados como totalmente transparentes ao clock e podem ser omitidos quando a quantidade de elementos de rede for contabilizada em uma cadeia mestre-escravo. Propriedades:
9 T1, derivado do STM-N (ITU-T Rec. G.707)
Sinais de saída:
9 T0: os sinais de sincronização para o processamento de sinais internos do equipamentos e para a geração de sinais de linha de SDH de saída: as freqüências são específicas da implementação
Propriedades básicas:
9 Precisão de Freerun: +20x10-6
9 Holdover: sem holdover
Referências normativas:
9 ITU-T Rec. G.958: sistemas de linhas digitais baseadas na hierarquia digital síncrona para uso em cabos de fibras óticas.
Arquitetura de sincronização de rede
De acordo com o [G.803], o método mestre-escravo é apropriado para sincronizar as redes SDH. Com o método mestre-escravo, o sinal de alta precisão e clock mestre estável é passado para todos os elementos da rede através de cadeias de clocks escravos, usando técnicas de chaveamento (phaselock) de fase.
Para o transporte de sincronização entre os nós da rede, geralmente são usados os sinais de linha , enquanto os sinais especiais de sincronização são usados para sincronizar o equipamento dentro de um nó da rede.
A fim de preencher os requisitos de desempenho para enlaces digitais internacionais [G.822], o clock mestre deverá cumprir os padrões para clocks de referência primária (PRCs), [G.811]. Em grandes redes podem ocorrer grandes cadeias. Isto leva à:
9 degradação do sinal de sincronização devido a:
o jitter e wander o ruído no clock
o jumps de fase causados por ações de ponteiro (em redes SDH/PDH mistas)
9 aumento na probabilidade de um interrupção na cadeia, desconectando eventualmente grandes partes da rede do PRC.
Por causa da sua importância para a operação apropriada de redes especiais de comunicações, os seguintes cuidados especiais elevem ser tomados para evitar os efeitos mencionados acima:
9 disposição de clocks escravos de alta qualidade em locais apropriados, geralmente nos nós da rede. Estes clocks do nó, que podem ser equipamentos independentes (SASEs) ou podem ser integrados em equipamentos de comunicação (p. ex. centrais ou interconexões) devem estar de acordo com [G.812T] e [ETS 300417-4]. Suas funcionalidades principais são:
o filtrar o jitter e wander que estão acumulados na cadeia de sincronização,
o servir no modo holdover como clock mestre temporário para uma parte da rede, se a conexão
para o PRC foi perdida,
o distribuir um sinal de sincronização para o equipamento de comunicação no nó (sincronização
entre os nós);
9 criar subredes com elementos de rede suportando os mecanismos de reconfiguração controlados pelo SSM;
9 planejar a rede de sincronização de tal forma que, tanto quanto possível, cada elemento de rede tenha acesso a vários sinais apropriados como sinais de referência. Isto aplica-se particularmente a clocks do nó.
Para a distribuição do sinal PRC para os elementos da rede, atualmente dois métodos estão sendo usados:
PRC para os nós da rede. Geralmente, neste tipo de rede de sincronização existem vários níveis hierárquicos de clocks de nós.
9 A distribuição sem fio (wireless) do sinal PRC para os elementos da rede. Como este método que é conhecido como 'sincronização mestre distribuída' ou 'PRC distribuído' é, em teoria, possível alimentar um sinal de referência para cada elemento da rede diretamente do PRC. Devido ao esforço necessário nos elementos da rede, isto não é usado. O acesso realístico usa a distribuição de rádio para os clocks do nó e a partir daí pequenas cadeias mestre-escravo para os elementos da rede. A fonte do sinal PRC pode ser uma estação terrestre ou satélites com PRCs, p. ex. os satélites do sistema de localização global (GPS).
Sincronização de redes mestre-escravo
Propriedades genéricas
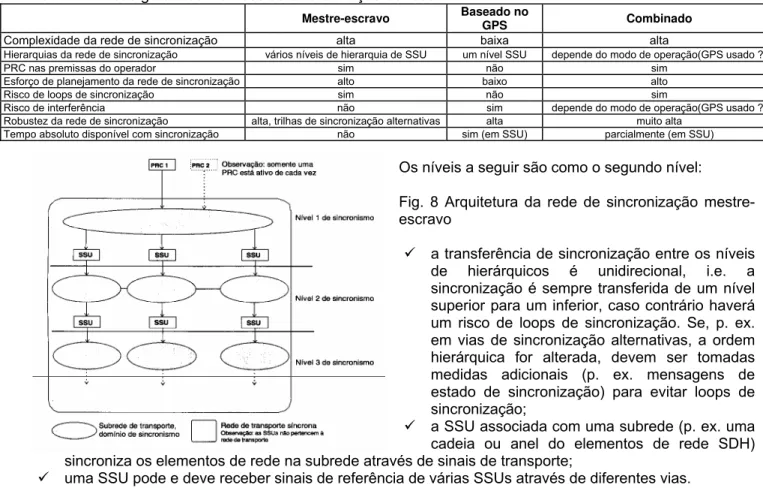
A figura 8, usando o método de representação do [G.803], mostra as propriedades de arquitetura e necessidades resultantes de uma sincronização de rede mestre-escravo:
9 a rede consiste em vários níveis hierárquicos;
9 o nível de hierarquia mais alto contém o PRC da rede. Para fins de backup pode existir um segundo PRC, mas apenas um PRC é ativado por vez, i.e. a rede é sempre sincronizada por uma fonte;
9 o nível de hierarquia mais alto efetua a distribuição do sinal de referência de sincronização para um número de SSUs (unidades de alimentação de sincronização);
Cada uma destas SSUs fornece a sincronização para uma subrede no segundo nível de sincronização. O papel da SSU para a subrede é similar ao papel do PRC para toda rede. Se a SSU perder todos os sinais de referência vindos do PRC, servirá como fonte de referência para a subrede. Este papel requer clocks de alta qualidade, de acordo com o [G.812] ou [300462-5].
Tabela 1 Visão geral dos métodos de sincronização de rede
Mestre-escravo Baseado no
GPS Combinado
Complexidade da rede de sincronização alta baixa alta
Hierarquias da rede de sincronização vários níveis de hierarquia de SSU um nível SSU depende do modo de operação(GPS usado ?)
PRC nas premissas do operador sim não sim
Esforço de planejamento da rede de sincronização alto baixo alto
Risco de loops de sincronização sim não sim
Risco de interferência não sim depende do modo de operação(GPS usado ?)
Robustez da rede de sincronização alta, trilhas de sincronização alternativas alta muito alta
Tempo absoluto disponível com sincronização não sim (em SSU) parcialmente (em SSU)
Os níveis a seguir são como o segundo nível:
Fig. 8 Arquitetura da rede de sincronização mestre-escravo
9 a transferência de sincronização entre os níveis de hierárquicos é unidirecional, i.e. a sincronização é sempre transferida de um nível superior para um inferior, caso contrário haverá um risco de loops de sincronização. Se, p. ex. em vias de sincronização alternativas, a ordem hierárquica for alterada, devem ser tomadas medidas adicionais (p. ex. mensagens de estado de sincronização) para evitar loops de sincronização;
9 a SSU associada com uma subrede (p. ex. uma cadeia ou anel do elementos de rede SDH) sincroniza os elementos de rede na subrede através de sinais de transporte;
9 uma SSU pode e deve receber sinais de referência de várias SSUs através de diferentes vias.
Arquitetura funcional
importante observar que os sinais de 2 Mbit/s, que foram transportados em containers SDH geralmente não apropriados como sinais de referência.
Propriedades básicas das redes de sincronização mestre-escravo:
9 a sincronização é no formato de árvore, i.e. de um ponto simples na rede (a localização no PRC) a sincronização é distribuída para cada elemento de rede através de cadeias de clocks. No caso de uma falha na rede, uma árvore alternativa usando vias de transporte normalmente não envolvida no transporte de sincronização deverá ser encontrada, se possível. Isto é feito com os métodos descritos na seção ;
9 a rede de sincronização pode ser decomposta em cadeias de sincronização, descritas em [G.803]: 9 na rede existem várias classes de clocks escravos com diferentes propriedades e diferentes funções.
Os clocks podem ser ordenados em hierarquias com respeito às suas qualidades ou sua posição na cadeia de clock;
9 deve-se assegurar que um clock escravo de um nível de qualidade superior nunca fique subordinado a um sinal de referência de qualidade inferior. Para esta finalidade, as medidas incluem a mensagem de estado de sincronização, sinais de referência não apropriados, etc;
9 cada SSU fornece sincronização para uma parte da rede. Se ocorrer uma falha na trilha de sincronização e nenhuma trilha alternativa puder ser encontrada, a SSU fornecerá um clock mestre para o segmento da rede em falha.
Vantagens, desvantagens, aplicação típica
Vantagens:
9 O operador da rede é proprietário do PRC, portanto possui controle completo na rede de sincronização.
9 Nenhum equipamento adicional como receptores GPS é necessário (vantagem nos custos).
Fig. 9 - Rede de sincronização mestre-escravo típica com subredes.
9 Sincronização distribuída em fibra óptica, fio de cobre ou radiotransmissão, portanto o risco de interferência não intencional ou intencional é extremamente pequeno.
Desvantagens:
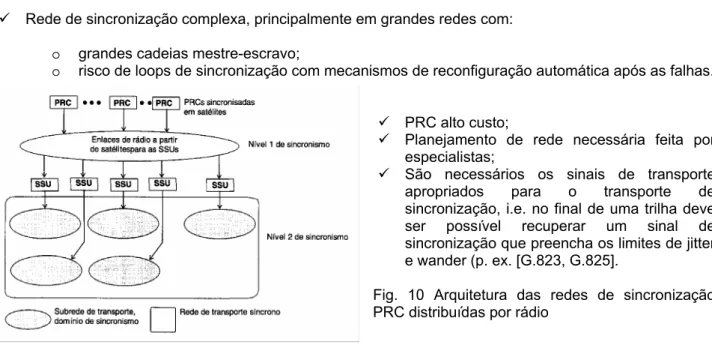
9 Rede de sincronização complexa, principalmente em grandes redes com:
o grandes cadeias mestre-escravo;
o risco de loops de sincronização com mecanismos de reconfiguração automática após as falhas.
9 PRC alto custo;
9 Planejamento de rede necessária feita por especialistas;
9 São necessários os sinais de transporte apropriados para o transporte de sincronização, i.e. no final de uma trilha deve ser possível recuperar um sinal de sincronização que preencha os limites de jitter e wander (p. ex. [G.823, G.825].
Fig. 10 Arquitetura das redes de sincronização PRC distribuídas por rádio
Aplicação típica:
Redes de sincronização distribuídas (PRC distribuída)
Um método alternativo é a distribuição do sinal de sincronização diretamente para cada elemento da rede.
Este método, conhecido como 'Mestre distribuído' ou 'PRC distribuído' é viável apenas com a distribuição de rádio, pois uma distribuição baseada em fios necessita de uma rede de cabos extra que a torna muito dispendioso. Mesmo uma arquitetura de sincronização de PRC distribuído por rádio não é realista, pois cada elemento de rede deverá ser equipado com um receptor apropriado.
Como o objetivo principal de uma rede de sincronização é sincronizar as SSUs, as vantagens do método PRC distribuído serão efetivas se apenas as SSUs forem diretamente sincronizadas no GPS e os elementos da rede de transporte forem sincronizados como mestre-escravo, utilizando portanto uma distribuição combinada.
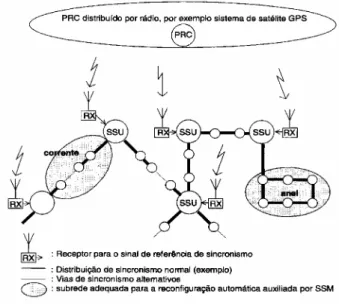
A figura 10 mostra uma representação genérica do método descrito, a figura 11 mostra a mesma rede que a figura 9 com PRC distribuído por rádio (satélite).
Fig. 11 - Sincronização PRC distribuída por rádio, rede conforme 10-9
Arquitetura funcional
A figura 11 mostra a sincronização baseada em GPS. O sistema GPS representa o PRC da rede, as cadeias de distribuição mestre-escravo para as SSUs são substituídas por rádio-enlaces. Um receptor processa o sinal GPS e retira um sinal de referência para a SSU. Geralmente a distribuição de sincronização abaixo do nível SSU é idêntica à uma rede sincronizada mestre-escravo.
Vantagens, Desvantagens, Aplicação típicas
Vantagens:
9 Sinal de referência síncrona disponível no mundo todo.
9 Hierarquia de distribuição plana, sem risco de loops de sincronização. 9 Wander insignificante, o jitter pode ser filtrado no receptor e/ou nas SSUs. 9 Fácil planejamento de rede.
Desvantagens:
9 Depende de operador para o sistema GPS. Embora não existam contratos sobre o uso do sistema, existe um 'fact sheet' oficial sobre o controle do GPS do governo dos EUA que informa que o sistema GPS está disponível (a nível internacional) para todos os usuários, sem necessidade de licenças. 9 Equipamento adicionais necessários:
o receptores com aumento de funcionalidades de supervisão;
o antena com visão ampla, proteção contra raios, problemas de cabeação, etc;
9 Risco de interferência, p. ex. através de sistemas de telefonia móvel. 9 Razoavelmente econômico apenas em nós com muitos equipamentos.
Aplicação típica:
Combinação dos métodos mestre-escravo e mestre distribuído
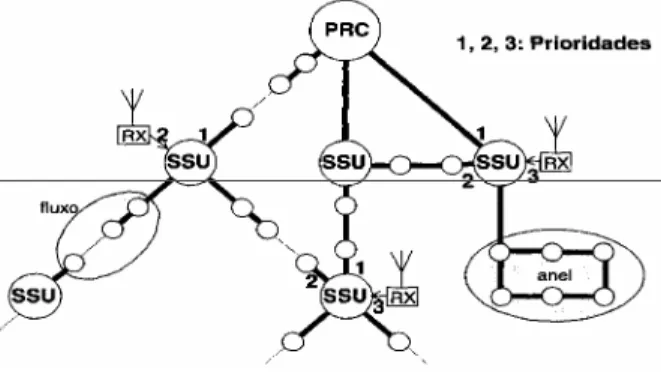
As vantagens dos dois métodos podem ser combinadas. A figura 12 mostra os exemplos das seções anteriores
Fig. 12 Combinação das sincronizações mestre-escravo e rádio distribuído com receptores de GPS adicionados a algumas SSUs selecionadas
Os números em volta das SSUs indicam as prioridades. A atribuição de prioridades determina se a rede é sincronizada como mestre-escravo em operação normal, com as referências baseadas no GPS como backup ou vice-versa. A escolha das opções depende da topologia da rede e das preferências do operador.
Vantagens (adicionais às vantagens dos métodos descritos acima):
9 Aumento de disponibilidade de um sinal de referência devido aos sistemas completamente independentes.
Desvantagens (adicionais às vantagens dos métodos descritos acima):
9 Custo dos receptores PRC e GPS.
Aplicação típica:
9 A solução combinada é indicada para redes com poucas malhas onde é difícil encontrar pelo menos duas trilhas alternativas de sincronização para cada SSU na rede.
Características da distribuição de sincronização intra-nós e entre nós
Esta seção abrange apenas a sincronização de redes SDH para a transferência de sincronização de, para ou nas redes, usando outros métodos de transporte (p. ex. PDH, ATM). A figura 13 mostra as áreas de sincronização intra-nós e entre-nós.
Fig. 13 Sincronização intra-nós e entre-nós.
A tabela 2 resume as características da distribuição de sincronização intra-nós e entre-nós. Casos especiais e maiores detalhes são fornecidos nas seções seguintes.
Intra-nó Inter-nós
Finalidade
Sincroniza todos os equipamentos em um nó de rede através do envio de um sinal de referência para cada equipamento
Distribui o sinal do PRC para os clocks do nó ou de um clock do nó para outro
Topologia star Árvore com cadeias ou anéis de transporte entre os
nós da rede Sinais Sinais de sincronização dedicada sem tráfego: 2048
kHz (G.703§10) 2048 kbit/s (G.703§6) com SSM Sinais de linha: STM-N Mensagens de estado de
sincronização 2048 kHz: não 2048 kbit/s com SSM: sim sim
Tabela 2 Características da sincronização intra-nós e entre-nós
Distribuição da sincronização entre nós
De acordo com [G.803] uma rede de sincronização mestre-escravo pode ser decomposta em cadeias de clocks escravos distribuindo o sinal PRC.
A cadeia de referência consiste em um PRC, elementos de rede de transporte (NEs) e unidades de alimentação de sincronização (SSUs). Os clocks nos NEs e nas SSUs possuem propriedades diferentes, de acordo com as regras de distribuição da rede de sincronização. As simulações mostraram que a quantidade de clocks em cascata deve ser limitada, a fim de não exceder os limites da rede para jitter e wander ([G.823], [G.825], [300462-3]). Os limites são 20 NEs entre SSUs e um máximo de 10 SSUs em uma cadeia de sincronização. A quantidade total de clocks em cascata (NEs e SSUs) não pode exceder 60. A figura 14 mostra a sincronização de cadeia de referência de acordo com ITU-T Rec. G.80.
É importante observar que estes números podem ser usados como orientação, mas não são limites rígidos, porque dependem da propriedades do clock, principalmente da sua constante de tempo.
Os elementos da rede entre PRC e SSU ou entre as SSUs efetuam as seguintes tarefas no transporte da sincronização (os números referem-se à cadeia de referência):
9 NE 1: geram um sinal de transporte cuja sincronização é derivada do PRC (ou SSU)
9 NEs 2..n-1: recuperam o clock do sinal de transporte de entrada e o utiliza como referência para o SETS. A sincronização dos sinais de transporte de saída é derivada dos SETS.
9 NE n: recupera o clock do sinal de transporte SOH de entrada e gera um sinal de referência (T4) para a SSU.
A regra "um clock escravo de um certo nível de qualidade nunca deve ser sincronizado por um sinal de baixa qualidade" requer que o sinal T4 seja desativado, quando a qualidade ficar abaixo do nível SSU (ou, em alguns casos, abaixo do nível PRC). Para este fim, vários critérios de sinalização são supervisionados e a informação de qualidade na mensagem de estado se sincronização é avaliada.
O transporte da sincronização em uma seção da cadeia de referência é mostrada na figura 15. Nesta representação muito simplificada, que omite as possibilidades de seleção de referências, SSMs, etc, o fluxo lógico de sincronização é mostrado através das linhas nos blocos funcionais. As linhas não são conexões físicas mas indicam apenas quais sinais de saída são derivados de quais entradas.
Fig. 15 Transporte de sincronização de SSU para SSU
A sincronização utiliza a via seguinte da SSU no nó A para a SSU no nó B:
9 No nó da rede A, a SSU recebe um sinal de referência apropriado passível de tracer para o PRC na rede (assumption).
9 A fonte de sincronização SETS do elemento de rede SDH no nó A é sincronizado na SSU do nó A a partir de um sinal de sincronização entre nós de 2048 kHz.
9 Todos os sinais SDH de saída são temporizados através de SETS. 9 O elemento de rede de transporte
na cadeia retira um sinal de referência do sinal de transporte STM-N de entrada e envia-o ao SETS. Os sinais STM-N de saída, incluindo a sentido para trás do sinal que vem do nó A, são temporizados pelo SETS. Os loops potenciais de sincronização são informados por SSM (mensagem de estado de sincronização) nos sinais STM-N.
9 No nó B da rede, o sinal de referência retirado do sinal STM-N de entrada é enviado para a saída T4 do SETS, desviando o oscilador interno do SETS. A SSU retira jitter e parcialmente wander (em cima da freqüência de corte) e fornece uma sinal de referência limpo para a entrada externa do SETS.
Distribuição de sincronização intra-nós
O [G.803] recomenda que a distribuição de sincronização intra-nós deve ser no formato de uma estrela.
Esta arquitetura, que tem o mesmo conceito de BITS (Building Integrated Timing Suppiy) especificado por Bellcore, usa o clock do nó que alimenta um sinal de sincronização para todos os equipamentos do nó. O sinal de referência de sincronização para o clock do nó é extraído de um sinal de transporte selecionado. Esta configuração é mostrada na figura 15.
Exceções para a distribuição em star:
A figura 16 mostra um exemplo de uma topologia de rede onde o equipamento está fisicamente no nó da rede, mas pertence logicamente à uma sub-rede (um anel) sincronizada a partir de um clock de nó diferente. A fim de não interferir nos processos de restauração automáticos e propriedades dinâmicas do anel, o clock do nó não deve estar integrado no anel.
Fig. 16 Caso especial: elemento de rede não sincronizado do clock do nó (SSU)
Interworking entre SSU e elementos da rede de transporte
Existem dois problemas principais de interoperabilidade entre os elementos da rede de transporte e o clock do nó (SSU) em um nó da rede:
9 deve-se assegurar que uma SSU não é sincronizada por um sinal de referência com uma qualidade inferior à qualidade da própria SSU;
9 para o suporte da mensagem de estado se sincronização, os elementos da rede de transporte que geram sinais STM-N necessitam da informação sobre o estado da SSU (sincronizada ou no modo de holdover), a fim de introduzir a SSM apropriada nos sinais de saída.
Atualmente, na maioria dos nós de rede, a sincronização intra-nós está baseada em sinais de 2048 kHz.
Nestes sinais, o transporte da informação está limitado a uma informação binaria: on/off. Foi proposto usar os sinais de 2048 kbit/s com SSM para a comunicação com a SSU. Um sinal de 2048 kbit/s com SSM foi padronizado [G.704], mas a introdução deste método requer interfaces físicas apropriadas e processos de avaliação na SSU, assim como nos elementos da rede de transporte.
A figura 17 mostra em detalhes o fluxo de sincronização em um nó com SSU. A visão detalhada é necessária por causa das funcionalidades de SETS.
De NE n para SSU
O NE n extrai o sinal de referência do sinal de entrada STM-N e passa-o para a saída T4. É importante notar que o gerador de clock interno de NE n (SETG) não está envolvido na geração do sinal T4, caso contrário seria criado um loop de sincronização entre NE n e SSU.
Fig. 17 Fluxo de sincronização no nó da rede com SSU
Conforme descrito acima, o NE n supervisiona o sinal STM-N selecionado para o transporte de sincronização nos seguintes critérios:
9 LOS: perda do sinal 9 LOF: perda de quadro
9 a implementação de outros critérios de supervisão como EBER (taxa de erros de bits excessiva) é dependente do equipamento.
Se o sinal falhar, de acordo com o critério de supervisão, a saída T4 será desativada. Como a SSU é um clock de nível 2 na hierarquia de qualidade ('SSU-T' de acordo como o esquema em [G.707]), o nível de qualidade mínima aceitável não deverá estar abaixo de 'SSU-T'. Para saber qual dos dois valores possíveis 'PRC ou 'SSU-T' deverá ser configurado, depende da posição do clock na rede de sincronização.
De SSU para NE n
A SSU alimenta um sinal de referência para todos os elementos da rede no nó, incluindo o elemento de rede que passa o sinal de referência para a SSU. O SETS recebe um sinal de referência da SSU através da entrada T3 e usa a referência para a geração de sinais de saída STM-N (na figura 17 é mostrado apenas um sinal). Um loop de sincronização não irá ocorrer se os seletores do SETS estiverem apropriadamente ajustados. Nos sinais de saída STM-N, o SSM é ajustado para um valor fixo ('PRC ou 'SSU-T').
De SSU para NE 1
O NE 1 representa todos os elementos de rede 'normais' do nó, que são o início das cadeias da rede de transporte SDH. Estes elementos da rede recebem seus sinais de referência através do sinal de 2048 kHz, geralmente duplicado por razões de confiabilidade, na entrada T3.
Um problema é a informação de NE 1 sobre o estado da sincronização da SSU. Se a SSU for sincronizada e o nível de qualidade mínima aceitável em NE n foi ajustado para 'PRC, o SSM apropriado deverá ser PRC. Se a SSU estiver no modo holdover, 'SSU-T' deverá ter sido introduzido. Desativar a saída da SSU não faz sentido, pois uma SSU no modo holdover distribui uma referência que ó muitas vezes melhor do que no modo holdover SETS. Atualmente, a prática é introduzir um valor fixo ('PRC ou 'SSU-T') nos sinais de saída STM-N. A solução está sendo estudada.
Nós sem SSU
Em nós muito pequenos, que consistem em poucos equipamentos para disponibilização de uma SSU, não faz sentido a partir do ponto de vista econômico e pode levar a uma quantidade excessiva de SSUs na rede. Nestes casos, a sincronização poderá ser distribuída entre os elementos da rede, usando um dos seguintes métodos:
Distribuição de sincronização através de sinais de 2048 kHz
Sinais de 2048 kHz entre as entradas/saídas de referência externa. Quando este método é usado, deve ser verificado quantas entradas de referências podem ser controladas por uma saída de referência (fan-out). Isto depende das propriedades do equipamento, p. ex. se existe uma opção de entrada de alta impedância, etc. Como uma regra de thumb, duas entradas "normais" (sem alta impedância) podem ser conectadas a uma saída.
Opcionalmente, uma simples unidade de distribuição de sincronização poderá ser usada quando ocorrerem problemas de fan-out. Se a unidade de distribuição de sincronização tiver apenas elementos ativos como PLLs (Phase Lock Loops), deverá ser assegurado que em casos de falhas as saídas serão desligadas.
Vantagem:
9 Cadeias de sincronização menores, pois geralmente os elementos de rede são configurados de tal forma que o sinal de saída de referência é derivado diretamente do sinal STM-N de entrada (ver, desviando SEC). Isto significa que o elemento de rede poderá ser omitido quando a quantidade de NEs na cadeia entre SSUs for contabilizada.
Desvantagens:
9 O sinal de 2048 kHz não pode transportar a mensagem de estado de sincronização.
Distribuição da sincronização através de sinais de linha inter-estações
Vantagem:
9 A mensagem de estado de sincronização não será interrompida se todos os sinais STM-N forem usados. Se sinais inter-estações ("interface de funcionalidades SOH reduzida" de acordo com [G.707]) forem usados, deve ser verificado se o sinal suporta SSM. Isto não está padronizado na [G.707].
Desvantagens:
9 Mais clocks na cadeia de sincronização.
Normas para planejamento da rede de sincronização
Regras gerais para o planejamento de redes de sincronização
É necessário sincronizar as centrais digitais. Isto é um requisito essencial, pois os únicos sinais de multiplex síncronos verdadeiros nos sistemas de transmissão são os sinais de 2 Mbit/s (e os sinais de 1.5 Mbit/s). Os trinta canais de 64 kbit/s são multiplexados juntos sincronizadamente, para formar um grupo de sinais de 2 Mbit/s. Se um sinal de 64 kbit/s de um grupo de 2 Mbit/s for interconectado com outro grupo, estes dois grupos devem operar sicronizados por clock para que seja possível a operação sem slip (escorregamento).
Este requisito aplica-se a qualquer equipamento que interconecte canais digitais no nível de 64 kbit/s, i.e. juntamente com o equipamento da central, os roteadores de 64 kbit/s, os sistemas multiplex PCM-30 com função de derivação/inserção (drop/insert) e equipamentos similares também devem ser sincronizados.
Estas redes - virtuais - digitais de 2 Mbit/s normalmente também são conectadas a redes adjacentes, estas redes de diferentes operadores possuem seus próprios clocks de rede. Podem ocorrer escorregamentos de bits e de quadro. Como estas redes operam no modo plesiócrono. A freqüência de ocorrências de escorregamentos é minimizada se as freqüências de clock das redes tiverem um alto nível de precisão absoluta e conseqüentemente um pequeno desvio entre elas. De acordo com ITU-T Rec. G.811, apenas um escorregamento de quadro é permitido a cada 70 dias nesta central. Isto significa que a precisão absoluta das freqüências de clock da rede devem ser de Af / f (1x10-11).
Este alto nível de precisão de clock só pode ser, na prática, alcançado através de um padrão atômico de césio. Por causa do seu custo e complexidade, este PRC (clock de referência primária) só pode ser instalado em um ponto central na rede. Por questões de segurança, tais sistemas sincronizados são projetados para redundância completa. Se necessário, um sistema de backup poderá ser instalado em um local diferente.
Distribuição de clock em redes de transmissão PDH
A distribuição de clock em uma rede de comutação ou de dados com elementos de rede de 2 Mbit/s ocorre de acordo com o princípio mestre-escravo. A estrutura de distribuição é hierárquica, com o PRC operando no nível superior e os clocks escravos nos níveis inferiores.
A informação de clock é transmitida usando sinais de linha de 2 Mbit/s. Os sinais de transporte de clock (árvore de distribuição de clock) devem ser especificados em detalhes.
Os sistemas PDH de alta ordem transmitem todos os sinais de 2 Mbit/s no padrão transparente ao clock. Os equipamentos conectados às saídas obtêm o clock dos sinais de entrada de 2 Mbit/s.
Como resultado, a rede PDH de ordem superior - acima de 2 Mbit/s - é completamente independente da distribuição de clock e não precisa ser incluída no plano de sincronização. A distribuição de clock é planejada na rede "lógica" de 2 Mbit/s.
Distribuição de clock em redes de transmissão SDH
Os sinais de 2 Mbit/s propagados em uma rede SDH são, a princípio, transmitidos também no padrão transparente ao clock. Porém, os desvios de clock e deslocamentos de fase são compensados por justificação de ponteiro (pointer justification) nos sistemas SDH. Os sinais de saída de 2 Mbit/s podem, portanto, exibir uma certa quantidade de wander (jitter de baixa freqüência), o que significa que não são adequados para serem utilizados como relógio distribuído ao longo da rede. a seguir.
Conseqüentemente, a sincronização de uma rede de comunicação não pode ser planejada independente da rede de transmissão de SDH. Um PLANO DE SINCRONIZAÇÃO detalhado deve ser preparado, que combina, junto com os sistemas de transmissão, as centrais, PBX, outros elementos da rede de 2 Mbit/s e os sistemas de dados.
Como o grau de entrelaçamento na rede física é relativamente baixo, devem ser tomadas precauções para a distribuição de clock, que no caso de uma falha inicie uma reconfiguração automática de distribuição do clock ou comute a parte afetada da rede temporariamente para uma fonte de clock de reserva (SSU = unidade de alimentação de sincronização ou SASE = equipamento de sincronização independente) (ITU-T Rec. G.812).
Planejamento de sincronização passo a passo
Especificar a posição do nó PRC
O primeiro passo é determinar o ponto na rede no qual um gerador central de clock como PRC deve ser instalado. As possibilidades são:
9 posição especificada pelo operador da rede 9 posição especificada pelo planejador da rede
Sob certas circunstâncias pode ser prudente especificar uma posição adicional para a instalação de um "PRC de reserva (backup)".
Especificar a distribuição de clock
O clock será distribuído por toda a rede através de vias de transmissão individuais (seção por seção), de acordo com o princípio mestre-escravo. Cada nó da rede deve receber o clock da rede.
Desta forma, será criada uma rede de distribuição de clock estrela/árvore com sua origem no nó onde o PRC deve ser instalado (árvore de distribuição de clock principal).
Especificar a utilização de rotas de reserva
A comutação de proteção local controlada por ajustes de prioridades nas unidades possibilita a comutação para uma rota de reserva de transporte de clock. Na árvore de distribuição de clock, qualquer rota que não esteja em uso para a árvore de distribuição principal poderá servir como uma rota de reserva. O problema é evitar loops de sincronização fechados no sistema de distribuição de clock, no caso de comutação automática para uma outra via de sincronização. Utilizando o SSM no STM de ordem superior, estas rotas podem transmitir em qualquer sentido - mas nunca simultaneamente (figura 18).
Figura 18: Exemplo de reconfiguração (ITU-T Rec. G.803, figura 6.5)
Distribuição de clock intra-nós
Normalmente, cada nó utiliza apenas um sinal de clock da rede. Este sinal deve então ser distribuído nas estações - iniciando pela unidade que está recebendo o clock - para todas as outras unidades da estação. Para este fim, podem ser utilizadas as linhas de clock de 2 MHz.
Em grandes estações, unidades adicionais - distribuidores de clock/amplificadores de isolação para o sinal de sincronização - são necessárias para efetuar esta função (figura 19).
Figura 19 Arquitetura da rede de sincronização; distribuição de clock intra-nós (ITU-T Rec. G.803)
Provisão das fontes de clock em reserva
Neste caso, uma opção possível pode ser equipar cada estação que recebe o clock da rede através de apenas uma via com uma fonte de clock de reserva. Na prática, nem sempre isto será necessário. Depende da importância da estação para o operador da rede ou para o sistema de distribuição de clock da rede.
Clocks escravos
Um sinal de clock transmitido por várias seções de linha necessita de uma SSU, a fim de retirar jitter e wander.
Os parâmetros de planejamento a seguir estão especificados em ITU-T Rec. G.803 (ver a figura20):
Figura 20 Arquitetura da rede de sincronização; cadeia de referência (ITU-T Rec. G.803)
9 quantidade de elementos de rede SDH entre os regeneradores de sincronização (SSUs):no máximo 20 9 quantidade de regeneradores de sincronização em uma cadeia: no máximo 10
9 quantidade total de unidades: no máximo 60
Os repetidores/regeneradores de linha SDH não devem ser considerados. Os regeneradores de sincronização e fontes de clock de reserva são realizados pelas mesmas unidades.
Os limites mencionados acima se aplicam no caso de distribuição de clock sem erros, normal, assim como em condições de falhas. No caso de uma falha, uma comutação pode aumentar consideravelmente o tamanho de uma cadeia de sincronização, especialmente quando está sendo usado o marcador de sincronização 'SSM'.
Ajuste da base de dados das unidades SDH
Esta tarefa faz parte da fase de planejamento de instalação e será executada apenas durante o planejamento detalhado.
A base de dados deve ser criada individualmente para cada elemento de rede:
9 ajustes das tabelas de prioridades para cada saída de sincronização (sinais STM-N e saídas de sincronização);
9 ajustes de limites de desativação para saídas de 2 Mbit/s;
9 ajustes de indicadores de qualidade definidos de entrada de sincronização (entradas tributárias de 2 Mbit/s e entradas de clock de 2 MHz), ativação da função de sincronização automática em saídas tributárias de 2 Mbit/s (reversível ou não reversível).
Plano de distribuição hierárquica de clock
Para explicar o resultado de um planejamento de sincronização, deve ser montado um plano de distribuição.
A base é o plano de multiplexação detalhado da rede SDH. O plano será completado com o equipamento para o PRC e SSUs adicionais, assim como cabeação para interconexão de clock intra-nós adicional. O sentido de uma distribuição de clock será identificado com setas nas linhas de transporte de clock. As entradas do equipamento usado para a sincronização são identificadas com figuras de prioridade e/ou figuras do indicador para a qualidade do clock de entrada.
Uma representação útil adicional da distribuição de clock é o diagrama hierárquico da rede. Este diagrama fornece uma visualização transparente da situação da sincronização na rede. Um exemplo está na figura 24.
Sub-redes de recomposição.
Freqüentemente, as redes SDH consistem em anéis e cadeias SDH que foram combinadas para formar uma rede.
clock em um anel ocorre automaticamente, mesmo em condições de falhas. Em um anel, também é possível feed-in o clock em dois nós separados.
O mesmo aplica-se, naturalmente, a uma cadeia SDH onde o clock da rede está disponível nos dois lados (half-rings).
Divisão da rede em sub-redes sincronizadas.
Em um primeiro passo, a rede deve ser dividida em uma quantidade de subredes de auto-recomposição.
Dentro de cada subrede a distribuição de clock é muito simples e fácil de efetuar. Normalmente os anéis e cadeias SDH existentes serão usadas como subrede para a distribuição de clock. Porém, a princípio, também é possível definir anéis especiais para a distribuição de clock.
Plano de distribuição hierárquica de clock com sub-redes.
Para mostrar a distribuição de clock entre as sub-redes é útil criar também um plano de distribuição hierárquica de clock. Um exemplo é mostrado na fig. 26.
Exemplo do processo de planejamento de sincronização.
Planejamento padrão da distribuição de clock.
O ponto de início para planejar a distribuição de clock é a rede de transmissão física (figura ao lado), pois o sinal de clock deve ser distribuída por toda a rede através dos “links” desta rede (links de cabo, links de rádio).
Figura 21 - Estrutura física da rede (topologia)
Nesta representação, cada nó corresponde a uma estação na rede que necessita ser alimentada com o clock da rede. A distribuição do sinal de clock ao nível da unidade na estação é então tratada no estágio de planejamento. O primeiro passo é determinar o nó no qual a fonte do clock mestre deve ser instalado ou onde o clock da rede deve ser alimentado na rede.
Figura 22 Distribuição de clock - demanda de sincronização
Este “nó mestre” pode ser armazenado de tal forma que uma hierarquia de distribuição seja formada, uma árvore de distribuição de clock na qual cada nó seja alcançado através de um mínimo de seções de linha. Na maioria dos casos, porém, este nó é especificado pelo cliente (operador da rede).
Determinar um “nó mestre” apropriado:
Se o “nó mestre” não for especificado pelo cliente (ex. no centro de gerenciamento do operador da rede), o planejamento de sincronização pode selecionar um nó apropriado.
Figura 23 Distribuição de clock em uma rede entrelaçada (princípio mestre-escravo); apresentação física.