João Pedro Pinto Vieira Beiramar
Potência e Comando de Sistemas Industriais
João P edr o Pint o V ieir a Beir amar P o
tência e Comando de Sis
temas Indus
tr
iais
Tese de Mestrado
Ciclo de Estudos Integrados Conducentes ao Grau de Mestre
em Engenharia Eletrónica Industrial e de Computadores
Trabalho efetuado sob a orientação do
Doutor Manuel João Sepúlveda Mesquita de Freitas
Universidade do Minho
Engenheiro Fernando Sérgio dos Santos Ferreira
Macedo
MOGET Lda.
João Pedro Pinto Vieira Beiramar
Potência e Comando de Sistemas Industriais
Agradecimentos
Gostaria de dedicar este espaço para manifestar a minha gratidão para com as pessoas que, de diferentes formas, contribuíram para a concretização desta dissertação.
Em primeiro lugar gostaria de agradecer ao meu orientador, Professor Doutor Manuel João Sepúlveda Mesquita de Freitas pela orientação e apoio demonstrados ao longo de todo o projeto.
Ao meu orientador na Empresa, Engenheiro Sérgio dos Santos Ferreira Macedo, pela disponibilidade e partilha de conhecimentos.
À MOGET por me ter acolhido de forma calorosa.
Aos meus pais, pelos valores que me incutiram, pelo sacrifício e amor demonstrados.
À minha irmã, pelo apoio, compreensão e carinho.
Aos meus avós, por estarem sempre presentes na minha vida.
À restante família, pela união e momentos de descontração que me proporcionaram.
Aos meus amigos, por me terem acompanhado e apoiado em todos os momentos do meu percurso académico.
Resumo
A água é considerada um bem essencial para a sobrevivência dos seres vivos. Contudo, é um bem escasso que urge racionar e reaproveitar. Discute-se o uso racional, a sua aparentemente inevitável escassez e a degradação das suas reservas, pois dela depende a qualidade de vida do planeta. A construção de ETAR (Estações de Tratamento de Águas Residuais) é essencial para a manutenção da qualidade das águas dos rios e das praias, bem como para preservar a vida dos organismos nesses ambientes. No término do processamento da ETAR, o efluente tratado obedecerá a padrões e requisitos de qualidade, químicos e biológicos, de modo a ser possível efetuar a sua descarga para o meio ambiente.
A possibilidade de automatizar um sistema industrial desta envergadura é de elevada importância, visto que permite ao utilizador controlar e monitorizar processos, visualizando, compreendendo e agindo assim de uma forma eficaz. É necessário incorporar uma unidade de processamento central responsável por estabelecer a comunicação entre as diversas partes constituintes do sistema e atuar em conformidade. O utilizador deve ser capaz de interagir com o sistema de modo a conseguir modificar os parâmetros de acordo com a sua interpretação do momento.
Esta dissertação descreve uma ETAR e todo o seu funcionamento. São explicados os processos de automatização, controlo e monitorização e o dimensionamento de elementos de potência é efetivado. Um autómato, vulgo Controlador Lógico Programável (PLC), diversos sensores e aparelhagem de proteção foram utilizados para o efeito pretendido. O projeto foi realizado para o tratamento de um efluente proveniente de uma indústria de peixe.
Palavras-Chave: ETAR, Automação, Comando e Potência, Arrancadores
Abstract
Water is essential for life and to the survival of every living being. However, it is a scarce resource that needs to be rationed and reuse. The seemingly inevitable scarcity and degradation of the water reserves makes the rational use of water very important to preserve life in our planet. Construction of WWTP (Wastewater Treatment Plant) is essential for the maintenance of quality water in rivers and beaches, as well as to preserve the life of the organisms in these environments. At the end of the processing of the WWTP, the treated effluent shall comply with the chemical and biological standards and quality requirements, in order to be able to make its discharge into the environment.
The ability to automate an industrial system of this scale is very important, since it allows the user to control and monitor processes. Visualizing and understanding these processes allow the user to act with more efficiency. It is necessary to incorporate a central processing unit responsible for establishing communication between the various parts of the system and act accordingly. The user must be able to interact with the system in order to modify the parameters according to his interpretation of the moment.
This dissertation describes the command and power systems of an industrial unit. The processes of automation, control and monitoring are explained. The design of the power elements is also accomplished. An automaton, commonly known as a Programmable Logic Controller (PLC), various sensors and protective elements were used for the intended purpose. The project was conducted for treating an effluent from a fish industry.
Keywords: WWTP, Automation, Command and Power, Progressive Starters,
Índice
Agradecimentos ... iii Resumo ... v Abstract ... vii Índice ... ix Lista de Figuras ... xi Lista de Tabelas ... xvLista de Acrónimos ... xvii
Nomenclatura ... xix
CAPÍTULO 1 Introdução ... 1
1.1. Enquadramento ... 1
1.2. Motivação e Objetivos ... 3
1.3. Organização e Estrutura da Dissertação ... 4
CAPÍTULO 2 Estado da Arte ... 5
2.1. Introdução ... 5
2.2. Águas Residuais ... 5
2.3. Processos de Tratamento de Efluentes ... 6
2.3.1. Tratamento Preliminar ... 8
2.3.2. Tratamento Primário ... 9
2.3.3. Tratamento Secundário ... 10
2.3.4. Tratamento Terciário ... 11
2.3.5. Síntese dos Processos de Tratamento ... 12
2.4. Envolvimento de Portugal ... 15
2.5. Automatização, Controlo e Monitorização ... 16
2.6. Acionamento Industrial ... 21
2.6.1. Arranque direto ... 21
2.6.2. Arranque ... 22
2.6.3. Variador de Velocidade ... 23
2.6.4. Arrancador Progressivo ... 24
2.6.5. Comparação entre Arranque Direto, Arranque Y-∆ e Arrancador Progressivo ... 25
2.6.6. Comparação entre Arranque Y-∆ e Arrancador Progressivo ... 25
2.6.7. Variador de Velocidade vs. Arrancador Progressivo ... 26
2.7. Sensores ... 27
2.7.1. Sensor de nível ... 28
2.7.2. Sensor de pH ... 32
CAPÍTULO 3 Constituição da ETAR ... 33
3.1. Introdução ... 33
3.2. Constituição e Funcionamento da ETAR ... 33
3.3. Hardware Industrial ... 42
3.3.1. Transformadores de Intensidade ... 42
3.3.2. PM1000 ... 43
3.4. Hardware de Controlo ... 43
3.4.1. Sensor de Nível ... 44
3.4.2. Controlador Lógico Programável ... 45
3.4.3. Interface Homem-Máquina ... 47
3.5. Hardware de Atuação ... 49
3.5.1. Bombas e Motores ... 49
3.6. Aparelhos de proteção ... 52
3.6.1. Dimensionamento de Disjuntores Magneto-Térmicos ... 52
3.6.2. Dimensionamento de Interruptores Diferenciais ... 57
3.6.3. Dimensionamento de Contactores ... 58
3.6.4. Dimensionamento de Arrancadores Progressivos ... 62
CAPÍTULO 4 Sistema de Controlo da ETAR ... 65
4.1. Introdução ... 65
4.2.1. Funcionamento de uma Bomba ... 65
4.2.2. Alternância no Funcionamento das Bombas ... 66
4.2.3. Sinalização de Alarme ... 67
4.2.4. Funcionamento Bombas do Tanque de Homogeneização ... 68
4.2.5. Ciclo de Flotação ... 69
4.2.6. Flotação de Lamas ... 70
4.2.7. Ciclo SBR1 ... 70
4.3. Programação Visual ... 73
4.3.1. Interação entre Menus ... 74
4.3.2. Associação de Contactos ... 74
4.3.3. Definição de Temporizações ... 75
4.3.4. Teclado Numérico ... 75
4.3.5. Alarmes e Histórico ... 76
4.3.6. Password... 76
4.4. Implementação dos Controladores Lógicos ... 77
4.4.1. Definição de Variáveis ... 77
4.4.2. Modo Manual ... 78
4.4.3. Modo Automático ... 78
4.4.4. Alternância no Funcionamento de Bombas... 78
4.4.5. Tanque de Homogeneização ... 80
4.4.6. Ciclo de Flotação ... 81
4.4.7. Ciclo SBR1 ... 82
4.4.8. Eletroválvula ... 83
CAPÍTULO 5 Validação do Funcionamento da ETAR ... 85
5.1. Introdução ... 85
5.2. Interação entre Menus ... 85
5.3. Temporizações ... 89 5.4. Pré-Tratamento ... 90 5.4.1. Tanque de Bombagem ... 90 5.4.2. Tanque de Homogeneização ... 93 5.5. Tratamento Químico ... 95 5.6. Tratamento Biológico ... 99 5.7. Alarmes Gerados ... 106
CAPÍTULO 6 Conclusões e Perspetivas Futuras ... 107
Lista de Figuras
Figura 2.1 - Linha de tratamento convencional ... 8
Figura 2.2- Operação de Gradagem[15] ... 8
Figura 2.3 - Desarenador/Desengordurador[8] ... 9
Figura 2.4 - Decomposição Aeróbia ... 10
Figura 2.5 - Decomposição Anaeróbia: 1ª Etapa ... 11
Figura 2.6 - Decomposição Anaeróbia: 2ª Etapa ... 11
Figura 2.7 - Decomposição Anóxica ... 11
Figura 2.8- Águas Residuais Tratadas por Região Segundo Nível de Tratamento[2] ... 16
Figura 2.9 - Estrutura de um Autómato Programável ... 17
Figura 2.10 - Sistema SCADA ... 20
Figura 2.11 - Arranque Direto[29] ... 21
Figura 2.12 - Arranque Y-∆[29] ... 22
Figura 2.13 - Problema do Arranque Y-∆[32] ... 23
Figura 2.14 - Modelo de um Variador de Velocidade ... 24
Figura 2.15 – Proveito retirado do uso do Arrancador Progressivo[35] ... 25
Figura 2.16 – Formas de onda dos tipos de arranque [36] ... 25
Figura 3.1 - Diagrama Geral de Tratamento ... 33
Figura 3.2 - Processamento do Efluente na ETAR ... 34
Figura 3.3 - Exemplo de um Tamisador de Tambor Rotativo[46]... 35
Figura 3.4- Exemplo de um Tanque de Homogeneização[49] ... 36
Figura 3.5 - Exemplo de um Flotador[51] ... 37
Figura 3.6 - Agregação das Partículas Através da Coagulação e Floculação ... 38
Figura 3.7 - Exemplo de um Reator SBR [57] ... 39
Figura 3.8 - Entrada e Saída do Reator ... 39
Figura 3.9 - Sequência de Fases do Reator[58] ... 40
Figura 3.10 - Exemplo de um Espessador[61] ... 41
Figura 3.11 - Exemplo de uma centrífuga[8] ... 41
Figura 3.12 - Transformador de Corrente Siemens[62] ... 42
Figura 3.13 - PM1000[63] ... 43
Figura 3.14 - Momento de Obtenção do Sinal de Controlo[64] ... 44
Figura 3.15 - Sensor de Nível Tipo Boia[65] ... 44
Figura 3.16 - Autómato OMRON CJ2M-CPU1[66] ... 45
Figura 3.17 - Modo de Ligação dos Suportes de Expansão[66] ... 46
Figura 3.18 - Carta de Expansão CJ1W[68] ... 47
Figura 3.19 - Aspeto da Consola de Interface Gráfica[69] ... 47
Figura 3.20 - Corrente Máxima Admissível [84] ... 54
Figura 3.22 - Contator LC1D095BL[77] ... 61
Figura 3.23 - Acionamento Direto ... 61
Figura 3.24 - Acionamento por Arrancador Progressivo ... 63
Figura 4.1- Fluxograma de Trabalho de uma Bomba ... 66
Figura 4.2 – Fluxograma de Alternância das Bombas BS101 e BS102 ... 67
Figura 4.3 – Fluxograma do Sinalizador de Erro ... 68
Figura 4.4 – Fluxograma de Funcionamento do Tanque de Homogeneização ... 69
Figura 4.5 - Fluxograma do Ciclo SBR1 ... 71
Figura 4.6 - Fluxograma da Flotação de Lamas ... 72
Figura 4.7 - Fluxograma Ciclo de Flotação ... 73
Figura 4.8 - Opção Selecionada para Salto entre Menus ... 74
Figura 4.9 - Alteração do Aspeto Visual quando tudo Ativado ... 75
Figura 4.10 - Definição dos Temporizadores Bomba BH201 ... 75
Figura 4.11 - Teclado Numérico ... 75
Figura 4.12 – Ecrã de Alarmes ... 76
Figura 4.13 - Password Necessária... 77
Figura 4.14 - Atribuição de Contactos ... 77
Figura 4.15 - Lógica de Contactos do Modo Manual ... 78
Figura 4.16 - Lógica de Contatos do Modo Automático ... 78
Figura 4.17 – Variáveis auxiliares para comutação das Bombas ... 79
Figura 4.18 - Comutação de Bomba e Níveis. ... 79
Figura 4.19 - Controlo através de temporizadores ... 80
Figura 4.20 - Lógica Associada aos Temporizadores ... 80
Figura 4.21 – Parte da Lógica de Transições do Ciclo de Flotação ... 81
Figura 4.22 - Parte da Lógica das Ações do Ciclo de Flotação ... 82
Figura 4.23 - Ativação de um Equipamento na Etapa 4 ... 82
Figura 4.24 - Parte da Lógica de Transições do Ciclo SBR1... 83
Figura 4.25 - Eletroválvula Tanque 202 ... 84
Figura 4.26 - Parte da Lógica das Ações do Ciclo de Flotação ... 84
Figura 5.1 - Menu Principal ... 85
Figura 5.2 - Ecrã Pré-Tratamento ... 86
Figura 5.3 - Ecrã Tratamento Químico ... 86
Figura 5.4 - Ecrã Tratamento Biológico ... 87
Figura 5.5 - Ecrã Flotador ... 87
Figura 5.6 - Ecrã Desidratação de Lamas ... 88
Figura 5.7 - Ecrã em Espera ... 88
Figura 5.8 - Ecrã de Temporizações ... 89
Figura 5.9 - Temporização Introduzida para a Bomba BS201 ... 89
Figura 5.10 - Carregamento do Valor Introduzido para o Temporizador ... 90
Figura 5.12 - Acionamento da Bomba BS101 ... 91
Figura 5.13 - Deteção do Nível Mínimo ... 91
Figura 5.14 - Alternância de Bomba Realizada ... 92
Figura 5.15 - Deteção do Nível Máximo ... 92
Figura 5.16 - Nível de Alarme ... 93
Figura 5.17 - Encravamento por Software ... 93
Figura 5.18 - Bomba de Recirculação ON ... 94
Figura 5.19 - Bomba de recirculação OFF ... 94
Figura 5.20 - Ciclo de Flotação Desligado ... 95
Figura 5.21 - Início do Ciclo de Flotação ... 96
Figura 5.22 - Aguardar a Deteção do Nível Mínimo no Tanque de Homogeneização ... 97
Figura 5.23 – Início da última etapa do Flotador ... 97
Figura 5.24 - Fim de Ciclo do Flotador ... 98
Figura 5.25 - Tanque de Homogeneização a Esvaziar ... 98
Figura 5.26 - Condição de Paragem de Esvaziamento do Tanque de Homogeneização Ativada ... 99
Figura 5.27 - Carregamento dos Tempos do Ciclo SBR ... 100
Figura 5.28 - Fase de Carga SBR1 ... 100
Figura 5.29 - Ciclo de Arejamento SBR1/Carga SBR2 ... 101
Figura 5.30 - Ciclo de Decantação SBR1/Arejamento SBR2 ... 102
Figura 5.31 - Ciclo de Descarga SBR1/Decantação SBR2 ... 102
Figura 5.32 - Consequência Nível Mínimo Tanque 401... 103
Figura 5.33 - Consequência do Nível Máximo no Tanque 401 ... 103
Figura 5.34 - Bomba BS301 Desligada devido ao Nível Máximo do Tanque 401... 104
Figura 5.35 - Nível Máximo Tanque 501 ... 104
Figura 5.36 - Falta de Energia (Ciclo SBR1 Carga/SBR2 Descarga) ... 105
Figura 5.37 - Problema Resolvido e Ciclos Iguais ... 105
Figura 5.38 - Aviso de Disparo Térmico ... 106
Lista de Tabelas
Tabela 1.1 - Reutilização Indireta das Águas Residuais Tratadas ... 3
Tabela 2.1 - Proveniência de Poluentes e Parâmetros Físico-Químicos ... 7
Tabela 2.2 - Subprodutos gerados ... 12
Tabela 2.3 - Principais Poluentes Contidos nos Efluentes [14] ... 13
Tabela 2.4 - Objetivos e Processos de Tratamento ... 14
Tabela 2.5 - População Servida 2009[19] ... 15
Tabela 2.6 - Tipos de Arranque e Utilização Consoante a Aplicação[31] ... 26
Tabela 2.7 – Seleção do Tipo de Arranque Consoante o Objetivo Pretendido[31] ... 27
Tabela 2.8 - Vantagens e Algumas Aplicações dos Sensores[37] ... 31
Tabela 3.1 - Especificações Transformador de Corrente NF02 24-2JE20[62] ... 42
Tabela 3.2 - Especificações Autómato[66][69] ... 47
Tabela 3.3 - Caraterísticas da NS15 ... 48
Tabela 3.4 – Caraterísticas Bombas BS101 e BS102 ... 49
Tabela 3.5 – Caraterísticas Bomba BH201 ... 49
Tabela 3.6 - Caraterísticas Bomba BH202 ... 49
Tabela 3.7 - Caraterísticas Bomba BD701 ... 50
Tabela 3.8 - Caraterísticas Bomba BM301 ... 50
Tabela 3.9 - Caraterísticas Bomba BH301 ... 50
Tabela 3.10 - Caraterísticas Bomba BD702 e BD703 ... 50
Tabela 3.11 - Caraterísticas Bomba BS301 ... 51
Tabela 3.12 - Caraterísticas Bombas BH401 e BH402 ... 51
Tabela 3.13 - Caraterísticas Bombas BH501 e BH502 ... 51
Tabela 3.14- Caraterísticas Bomba BH601 ... 51
Tabela 3.15 - Caraterística Bomba BD704 ... 52
Tabela 3.16 - Caraterísticas Principais dos Disjuntores[74] ... 53
Tabela 3.17 – Valores de Correntes Nominais de Disjuntores Consoante o Equipamento ... 56
Tabela 3.18 - Disjuntores Magneto Térmicos-Selecionados ... 57
Tabela 3.19 - Gamas de sensibilidade ... 58
Tabela 3.20 - Interruptores Diferenciais Dimensionados ... 60
Tabela 3.21 - Corrente Nominal dos Contatores ... 60
Tabela 3.22 - Especificações Contator LC1D095BL ... 61
Lista de Acrónimos
AC Corrente Alternada
CBO Carência Bioquímica de Oxigénio CPU Unidade Processamento Central CQO Carência Química de Oxigénio DAF Flotação de Ar Disperso
DC Corrente Contínua
ERSAR Entidade Reguladora dos Serviços de Águas e Resíduos
ETAR Estação de Tratamento de Águas Residuais
ICA Instrumentação Controlo e Automação ID Interruptor Diferencial
INE Instituto Nacional de Estatística
INSAAR Instituto Nacional de Sistemas de Águas e Águas Residuais
HMI Interface Homem Máquina (Human Machine Interface)
PDC Poder de Corte
PEAASAR
Plano Estratégico de Abastecimento de Água e Saneamento de Águas Residuais
PH Potencial de Hidrogénio
PLC Controlador Lógico Programável (Programmable Logic Controller) RSRDEEBT
Regulamento de Segurança de Redes de Distribuição de Energia Elétrica em Baixa Tensão
RTIEBT Regulamento Técnico de Instalações Elétricas de Baixa Tensão
SBR Reator Biológico de Lamas
SCADA Sistemas de Supervisão e Aquisição de Dados
SST Sólidos Suspensos Totais USB Universal Serial Bus
Nomenclatura
Símbolo Significado Unidade
I Corrente A t Tempo s U Tensão V N Velocidade de Sincronismo rpm f Frequência Hz Tensão Simples V Tensão Composta V p Número de Polos P Potência Ativa W
Q Potência Reativa var
S Potência Aparente VA
Corrente Elétrica de Serviço A
Intensidade Máxima Permitida A
Corrente Nominal A
Corrente convencional de não funcionamento A
Corrente convencional de funcionamento A
Fator de Potência
Corrente diferencial A
CAPÍTULO 1
Introdução
A investigação efetiva e o interesse mundial na área da eletrónica verificados nas últimas décadas permitiram que se atingisse um nível de preponderância considerável em vários setores da indústria. Na atualidade, vários são os processos de produção controlados através de sistemas de automação e controlo. O objetivo não consiste em eliminar a presença humana mas sim em facilitar a vida ao utilizador, através de equipamentos que permitam uma maior e melhor visualização levando assim a uma ação mais rápida, precisa e intuitiva.
O tratamento de resíduos líquidos produzidos por indústrias ou resultante dos esgotos domésticos urbanos é uma das aplicações características deste tipo de sistemas.
A presente dissertação tem por base o projeto dos circuitos de comando e potência de um sistema industrial, mais concretamente, uma ETAR (Estação de Tratamento de Águas Residuais). Descreve-se o sistema de controlo, automatização e monitorização de todo o sistema, bem como são dimensionados os equipamentos necessários ao seu correto funcionamento. O efluente a ser tratado é proveniente de uma indústria de peixe.
1.1. Enquadramento
Outrora, o ambiente era um tema negligenciável para as mais distintas classes que constituem a sociedade. Persistia a imagem de um país rural, e por isso, “limpo” e imune à degradação ambiental que já afligia outros países mais industrializados [1].
Após a revolução de 25 de Abril de 1974, assistiu-se a uma crescente consciencialização do povo português, realizando o país avultados investimentos nos sistemas de saneamento. Os sistemas foram melhorados, garantindo-se assim o tratamento dos efluentes e preservação do meio ambiente. Desde 1976 que Portugal tem o reconhecimento constitucional da existência de direitos e deveres na área do ambiente [2], sendo considerada tarefa fundamental do Estado a proteção e valorização do património cultural português, a defesa da natureza e do ambiente, a preservação dos recursos naturais e do ambiente, bem como a preservação dos recursos naturais.
Dados oficiais, recolhidos pelo INE (Instituto Nacional de Estatística) apontam para uma proporção de população servida por sistemas de drenagem e tratamento de águas
residuais na ordem dos 84 e 73%, respetivamente [3]. Contudo, estes números apresentam-se ainda um pouco distantes do delineado pelo PEAASAR (Plano Estratégico de Abastecimento de Água e Saneamento de Águas Residuais) que seria de 90% [3].
A origem dos resíduos contidos nos efluentes pode ter proveniência distinta, como:
Efluentes Domésticos;
Efluentes Industriais;
Efluentes da Pecuária;
Lixiviação de Solos e Resíduos;
Agricultura Intensiva;
Intrusão Salina.
A diminuição dos recursos de água doce, bem como a quantidade excessiva de resíduos devolvidos à natureza incentivaram a que o tratamento das águas residuais se tornasse um tema em voga. Existem várias medidas para combater estes problemas, podendo estas ter origem preventiva ou curativa.
As águas residuais devem ser coletadas e direcionadas para uma estação de tratamento de modo a que os seus contaminantes sejam removidos e possam ser descarregados para o seu destino final em condições ambientalmente seguras e dentro das leis, protegendo assim o nosso ecossistema de eventuais desequilíbrios. O tratamento das águas residuais é efetuado nas ETAR, sendo os sistemas de tratamento mais comuns constituídos por processos que combinam métodos físicos, químicos e biológicos [4], em que o objetivo é:
Remover sólidos existentes (suspensos e sobrenadantes);
Diminuir a concentração da matéria orgânica biodegradável;
Eliminar organismos patogénicos;
Melhorar a qualidade da água tratada para que possa ser reutilizada [5].
Como já foi dito anteriormente, as aplicações das ETAR incluem vários setores da sociedade moderna, com especial relevo para a área industrial. As águas tratadas por estas podem ter como destino a reutilização ou a devolução ao meio ambiente. A reutilização pode ser direta ou indireta, dependendo se a água for lançada num ciclo hidrológico ou utilizada para aplicações sem ser para consumo humano.
Na tabela 1.1 apresentam-se alguns exemplos de reutilização indireta das águas residuais tratadas.
Tabela 1.1 - Reutilização Indireta das Águas Residuais Tratadas
1.2. Motivação e Objetivos
Os parâmetros para descarga de águas residuais são estabelecidos através de leis de estado sendo defendidos e suportados pelas mesmas. Para que isto seja possível, é necessário atestar as características do efluente tratado após diversos testes e feedbacks. A intenção e importância do tratamento de águas residuais tem por base a sua devolução ao meio ambiente em condições inofensivas ao mesmo. Dotar a ETAR de controlo e automatismos adequados é essencial para a obtenção das condições impostas pela lei Portuguesa.
A ETAR deve ter o seu funcionamento caracterizado pela autonomia, ou seja, o utilizador deve consultar e controlar certos e determinados parâmetros/equipamentos existentes através de informação orientada e interativa.
Os equipamentos e os seus operadores deverão estar seguros a todo e qualquer instante. Assim sendo, os dimensionamentos a realizar terão que ir de encontro a esta máxima, respeitando ainda custos pré-orçamentados.
Indústria
Lavagem de Equipamento Combate contra Incêndio
Rega Agrícola Silvicultura Plantações Alimentares Rega Paisagística Campos de Golfe Parques Públicos
Usos Recreativos e Ambientais
Reforço do caudal de Cursos de Água Lagoas e Lagos
Usos Urbanos Não Potáveis
Lavagem de Ruas Lavagem de Veículos Descarga de Autoclismos
O objetivo primordial da presente dissertação visa o projeto dos sistemas de potência e comando dos equipamentos específicos de uma ETAR através de um elemento central de controlo, mais concretamente, um PLC (Controlador Lógico Programável) e de acordo com a avaliação dos elementos do projeto ambiental.
1.3. Organização e Estrutura da Dissertação
No Capítulo 1 é efetuada uma breve introdução ao tratamento de águas residuais, descrevem-se sobre as motivações e objetivos que levaram à realização da dissertação e é ainda realizado um enquadramento do trabalho.
No segundo Capítulo consta uma análise dos processos aplicáveis ao tratamento de uma ETAR, bem como da envolvência de Portugal com o tema. Abordam-se ainda outros temas como automação, acionamento industrial e sensores.
O terceiro capítulo é composto pela constituição da ETAR que será projetada. Os seus constituintes são descritos ao pormenor e subdivididos nas diferentes categorias. O dimensionamento dos aparelhos de proteção é realizado.
No Capítulo 4 são discutidas as abordagens relativamente ao sistema de controlo da estação. É estabelecida a relação entre o autómato e a consola gráfica.
Por sua vez, o quinto capítulo valida o funcionamento da ETAR, através de simulação gráfica.
CAPÍTULO 2
Estado da Arte
2.1. Introdução
No decorrer deste capítulo será feita uma apresentação geral das ETAR, mencionando o seu funcionamento e os processos que nela ocorrem. São abordados aspetos relacionados com a automatização, controlo e monitorização aplicada à ETAR e os benefícios inerentes à mesma. É dada ênfase ao acionamento industrial, tipos de arranque com os quais as bombas/motores operam, sendo ainda realizada uma comparação entre os diferentes métodos. Os vários tipos de sensor de nível existentes são abordados.
2.2. Águas Residuais
O tratamento e destino final das águas residuais em conjunto com a rede de drenagem das mesmas constituem um serviço público de importância considerável.
Em função da sua origem existem quatro grupos de águas residuais, entre as quais se encontram as duas mais importantes: domésticas e industriais. As águas residuais domésticas são por norma originárias de serviços e instalações residenciais, sendo essencialmente provenientes do metabolismo humano e de atividades domésticas[6]. Por sua vez, as águas residuais industriais são oriundas das descargas de diversos estabelecimentos industriais. As suas características dependem do seu tipo e produção[7]. O conjunto de análises a efetuar visa a obtenção dos seus parâmetros físicos, biológicos e químicos, os quais se passam a apresentar[4] nas listas seguintes:
Lista das Caraterísticas Físicas das Águas Residuais
Turbidez Cor
Sólidos Totais Temperatura Odor
Lista das Características Biológicas das Águas Residuais Bactérias Vírus Parasitas (vermes) Algas Protozoários
Lista das Características Químicas das Águas Residuais
Sólidos Totalmente Dissolvidos Alcalinidade
Metais
Nutrientes & Orgânicos
pH
Cloretos
Assim, os benefícios inerentes ao tratamento de águas residuais são:
Ambiente circundante aos meios hídricos mais seguro e agradável para qualquer atividade humana;
Melhoria da saúde pública;
Atividades económicas saem beneficiadas [8].
2.3. Processos de Tratamento de Efluentes
A seleção do sistema de tratamento de águas residuais deve atender a diversos fatores, nomeadamente:
Qualidade do efluente bruto;
Qualidade pretendida do efluente-final;
Custos do investimento;
Custos de exploração;
Custos de transporte (sistemas de drenagem e bombagem de águas residuais).
De modo a ser viável o tratamento de água residual é necessário ter conhecimento dos elementos poluentes nela contida. Como referido anteriormente, as ETAR podem receber águas residuais com diferentes composições, o que implica a adoção de diferentes
tipos de operações e processos de tratamento adequados em função do tipo de águas residuais a tratar [9]. A tabela 2.1 apresenta alguns parâmetros físico-químicos em algumas áreas de aplicação das ETAR[4][10].
Tabela 2.1 - Proveniência de Poluentes e Parâmetros Físico-Químicos
Proveniência Poluentes Associados e Parâmetros
Físico-Químicos
Campos de Cereais Turbidez, fósforo, nitratos, sólidos totais
Colheita Florestal Turbidez, temperatura, sólidos totais
Pastagens Bactérias fecais, turbidez, fósforo
Descarga Industrial Temperatura, condutividade, sólidos
totais, toxinas, pH
Resíduos Urbanos Turbidez, fósforo, nitratos, temperatura,
condutividade, oxigénio dissolvido, CBO
Estações de Tratamento de Esgoto
Oxigénio dissolvido e CBO, turbidez, condutividade, fósforo, nitratos, bactérias fecais, temperatura, sólidos totais, pH
Construção Turbidez, temperatura, oxigénio
dissolvido e CBO, sólidos totais, toxinas
Os processos a utilizar derivam assim dos elementos poluentes que constituem o efluente, podendo estes ser:
Processos Físicos;
Processos Químicos;
Processos Biológicos
Embora ao longo dos anos se tenha verificado um aumento no interesse pelos tratamentos químicos de águas residuais, o seu uso é geralmente em conjunto com processos físicos e processos biológicos [11].
De um modo geral, o tratamento de águas residuais numa ETAR é composto por 4 fases distintas, designadas por tratamento preliminar, primário, secundário e terciário. O tratamento engloba uma fase líquida que processa o tratamento do efluente e uma fase sólida que processa o tratamento dos resíduos gerados aquando da fase líquida [12]. Pode
assim definir-se uma linha de tratamento convencional de águas residuais como pode ser observado na figura 2.1. TRATAMENTO PRELIMINAR TRATAMENTO PRIMÁRIO TRATAMENTO SECUNDÁRIO JUSTIFICA TRATAMENTO TERCIÁRIO? EFLUENTE TRATAMENTO TERCIÁRIO SIM NÃO EFLUENTE TRATADO
Figura 2.1 - Linha de tratamento convencional
2.3.1. Tratamento Preliminar
Numa primeira fase, as águas residuais chegam as ETAR com uma velocidade elevada, arrastando consigo areias, trapos e sólidos de dimensão considerável. Urge eliminar estes sólidos de maior dimensão antes do tratamento primário de modo a que os equipamentos não sejam afetados na sua eficiência nem danificados de forma permanente. Posto isto, tendo como finalidade a proteção dos sistemas mecânicos da ETAR, são incorporadas operações de gradagem, desarenamento e remoção de gorduras, representadas pelas figuras 2.2 e 2.3[13].
Gradagem: consiste num canal com uma grade, podendo esta ter dimensões distintas: grossa, média ou fina. Pode ser aplicada uma combinação de duas grades com tamanhos diferentes, de forma a reter os materiais grosseiros. As grades necessitam de ser limpas, manualmente ou mecanicamente, visto ser aqui gerado o primeiro subproduto no tratamento das águas residuais, vulgarmente denominado por gradados[14].
Desarenamento: tem por base a remoção das areias que são arrastadas com as águas residuais. Os desarenadores são comumente empregues a jusante da gradagem de modo a remover materiais que depositam facilmente devido à sua densidade ser inferior à da água.
Remoção de Gorduras: A última etapa do tratamento preliminar traduz-se na eliminação de flutuantes, quer isto dizer, permite realizar o desengorduramento. É extremamente importante a ocorrência desta operação, pois pode-se criar uma película superficial que dificulta as trocas gasosas e interfere com a atividade biológica dos processos seguintes, ou mesmo do meio recetor do efluente final[16].
Figura 2.3 - Desarenador/Desengordurador[8]
2.3.2. Tratamento Primário
A etapa seguinte de tratamento refere-se ao tratamento primário que normalmente assenta numa decantação primária. São utilizadas operações de índole física, sendo por vezes adicionados químicos ao processo, com o objetivo de facilitar a remoção de sólidos suspensos, bem como permitir que os sólidos dissolvidos estejam em menor escala. O objetivo passa portanto por remover uma porção substancial de sólidos orgânicos que de outra maneira seriam diretamente descarregados para o seu destino final. O número de decantadores a serem usados, a sua dimensão e a sua geometria estão dependentes do caudal da ETAR.
Normalmente a decantação primária, quando aplicada de modo eficiente, permite uma remoção média de 50 a 70% dos sólidos suspensos e 25 a 40% da carência bioquímica de oxigénio (CBO). Como supracitado, a adição de coagulantes e polímeros, através de um processo físico-químico de precipitação/coagulação química, pode melhorar a remoção de alguns poluentes do efluente a tratar[14]. Após a decantação primária, a sedimentação é utilizada, usualmente, para remoção de materiais que se
depositam nas águas residuais. Consequentemente, no término deste processo são gerados novamente subprodutos, sendo estes chamados de lama primária.
2.3.3. Tratamento Secundário
O efluente que chega após a decantação primária ainda contém uma carga elevada no que concerne a CQO, CBO e a SST. O tratamento secundário tem como finalidade a remoção da carga de CQO, CBO e SST que ainda subsiste e a colocação dos valores do efluente de acordo com as normas legislativas de descarga [14]. Este tratamento funciona, portanto, como um complemento ao tratamento primário.
Durante esta fase, os processos biológicos ganham especial destaque devido à elevada componente biodegradável que as águas residuais contêm[12]. Estes processos são utilizados para converter a matéria orgânica final que se encontra dividida e dissolvida nas águas residuais em sólidos orgânicos e inorgânicos sedimentáveis. Normalmente, num tratamento biológico havendo formação de sólidos terá de existir um decantador secundário. A sua função é análoga à do decantador primário, ou seja, impulsiona a separação entre os sólidos e o efluente. Os processos biológicos usados podem ser classificados em cinco grandes tipos: aeróbios, anóxicos, anaeróbios e combinados, estando representados pelas figuras 2.4 a 2.7[10].
Processos Aeróbios: condição na qual os organismos usam oxigénio e matéria orgânica em conjunto com nutrientes (azoto, fósforo) e metais (ferro, etc.) de forma a produzir mais organismos, sólidos sedimentáveis e dióxido de carbono[17].
Oxigénio Bactérias Matéria Orgânica Nutrientes Mais Bactérias Sólidos Sedimentáveis Dióxido de Carbono Decomposição Aeróbia
Figura 2.4 - Decomposição Aeróbia
Processos Anaeróbicos: o processo de tratamento anaeróbico consiste em duas etapas, ocorre completamente na ausência de oxigénio e fornece um produto utilizável: o gás metano.
Na primeira etapa do processo os microrganismos usam matéria orgânica como alimento para a produção de mais organismos, ácidos voláteis, sulfeto de hidrogénio, outros gases e alguns sólidos estáveis. Na segunda etapa, os microrganismos
anaeróbios usam os ácidos voláteis como sua fonte de alimentação. O processo produz mais organismos, sólidos estáveis e gás metano, podendo este ser usado para fornecer energia a vários componentes do sistema de tratamento[17].
Bactérias Matéria Orgânica Nutrientes Mais Bactérias Sólidos Sedimentáveis Sulfeto de Hidrogénio Decomposição Anaeróbia
Figura 2.5 - Decomposição Anaeróbia: 1ª Etapa
Bactérias anaeróbias Ácidos Voláteis Nutrientes Mais Bactérias Sólidos Sedimentáveis Metano Decomposição Anaeróbia
Figura 2.6 - Decomposição Anaeróbia: 2ª Etapa
Processos Anóxicos: no processo de tratamento anóxico, ou seja, sem oxigénio, os microrganismos usam o oxigénio fixado em compostos de nitrato como fonte de energia. São produzidos mais organismos e o nitrogénio das águas residuais é convertido em gás nitrogénio que é libertado para o ar[17]. A decomposição anóxica é demonstrada na figura 2.7. Oxigénio em compostos de nitrato Bactérias Nutrientes Matéria Orgânica Mais Bactérias Sólidos Sedimentáveis Nitrogénio Decomposição Anóxica
Figura 2.7 - Decomposição Anóxica
Processos Combinados: consistem na combinação da aplicação dos processos biológicos supracitados.
2.3.4. Tratamento Terciário
O tratamento terciário não é apenas passível de utilização para garantir o efluente dentro dos trâmites legais. Cada vez mais, e de forma mais evidente, como mostrado na tabela 1.1, as águas residuais começam a ser reutilizadas das mais variadas formas. Por
vezes existe a necessidade de preservar e proteger o meio aquático que receberá as águas residuais tratadas. O tratamento secundário denota limitações significativas na redução da concentração de nitrogénio e fósforo do efluente. Isto pode ser um problema, visto que estes nutrientes são importantes para as plantas e, como tal, se o efluente for assim descarregado para um lago, contribui para a proliferação e eutrofização das algas, provocando um envelhecimento do lago.
Ainda assim, o tratamento terciário também apresenta as suas desvantagens, nomeadamente em termos financeiros. Os seus custos de operação e manutenção, por vezes, dobram o preço investido no tratamento secundário e necessitam de um estudo cuidadoso relativamente ao seu custo/benefício. [14][17]
2.3.5. Síntese dos Processos de Tratamento
Devolver as águas residuais com parâmetros aceitáveis é o objetivo principal de uma ETAR. Um tratamento efetivo e eficiente remove os poluentes indesejáveis das águas. O principal foco de problemas no que toca a poluentes contidos nas águas residuais pode ser observado na tabela 2.3.
De forma a facilitar a análise dos processos de tratamento de águas residuais foram sintetizadas na tabela 2.4 várias informações relacionadas com os mesmos. O objetivo, as operações e processos passíveis de serem realizados dentro desse nível de tratamento são assim resumidos.
Ao longo dos processos de tratamento vão surgindo subprodutos provenientes das operações realizadas, os quais podem ser observados na tabela 2.2. Antes de irem para o seu destino final devem ser tratados de modo a tornar o seu manuseamento mais fácil e seguro, assegurando deste modo um transporte menos dispendioso e igualmente seguro[12].
Tabela 2.2 - Subprodutos gerados
Operação/Processo Subproduto Gerado
Gradagem Gradados
Desarenação Areias
Desengorduramento Gorduras
Tabela 2.3 - Principais Poluentes Contidos nos Efluentes [14]
Constituintes Razão da Importância
Sólidos Suspensos
Os sólidos suspensos podem levar ao aparecimento de depósitos de lamas e de condições anaeróbias quando a água residual não tratada é descarregada no meio aquático.
Matéria Orgânica Biodegradável
Composta principalmente por proteínas, hidratos de carbono e gorduras, os orgânicos biodegradáveis são medidos comumente em termos de CBO e CQO. Quando descarregados para o meio aquático sem tratamento, podem levar ao esgotamento dos recursos de oxigénio.
Patogénicos
Doenças transmissíveis podem ser transmitidas por organismos patogénicos presentes nas águas residuais.
Nutrientes
Nitrogénio e fósforo, juntamente com carbono são nutrientes essenciais para o crescimento. Quando enviados para o meio aquático, estes nutrientes podem levar ao crescimento de vida aquática indesejável. Caso seja em excesso, pode inclusivamente, poluir.
Poluentes Prioritários
Compostos orgânicos e inorgânicos selecionados com base no conhecimento ou suspeita de provocar cancro, mutações genéticas ou efeitos teratogénicos.
Matéria Orgânica Refratária
Estes orgânicos tendem a resistir aos métodos convencionais de tratamento de águas residuais. Tipicamente, incluem fenóis e pesticidas agrícolas.
Metais Pesados
São normalmente adicionados às águas residuais de setores industriais e comerciais e devem removidos se a água tratada for reutilizada.
Matéria Inorgânica
Dissolvida
As águas residuais de origem doméstica podem conter matéria inorgânica como cálcio, sódio e sulfato. Caso se deseje a reutilização, os mesmos devem ser removidos
Tabela 2.4 - Objetivos e Processos de Tratamento Processo de Tratamento Objetivo Operações e Processos Preliminar
Remoção de sólidos grosseiros; Remoção de areias; Regularização dos caudais; Uniformização das cargas poluentes;
Remoção de sólidos flutuantes.
Gradagem; Desarenação; Homogeneização e Armazenamento; Separação de óleos e gorduras. Primário
Remoção de sólidos sedimentáveis; Remoção de óleos, gorduras e sobrenadantes; Redução da carga orgânica para a admitida no
tratamento secundário. Neutralização; Flotação; Decantação; Filtração. Secundário
Oxidação dos compostos orgânicos através da ação de microrganismos;
Estabilizar a matéria orgânica;
Eliminar parte dos SST, CQOe .
Lamas Ativadas; Leitos Percoladores; Discos Biológicos; Lagoas Anaeróbias; Lagoas Aeróbias; Lagoas de Estabilização; Digestão Anaeróbia; Decantação. Terciário
Remoção de matéria orgânica, bactérias, sólidos, certos compostos tóxicos, nutrientes
(azoto e fósforo) que ainda persistem após tratamento secundário;
Evitar a eutrofização dos meios recetores; Obter um efluente de elevada qualidade.
Coagulação; Filtração; Adsorção sobre Carvão; Troca Iónica; Osmose Inversa; Desinfeção.
2.4. Envolvimento de Portugal
Numa perspetiva de proteção do ambiente, de saúde pública e da gestão integrada dos recursos hídricos têm vindo a ser realizados investimentos significativos na área do tratamento de águas residuais. Os benefícios inerentes ao funcionamento das ETAR são evidentes e inegáveis[18].
No ano de 2009, conforme se pode observar na tabela 2.5, 84% da população do Continente foi servida por sistemas de drenagem de águas residuais e 73% por estações de tratamento de águas residuais. As regiões Norte e Centro são as que se apresentam mais distantes dos objetivos e metas traçados pelo PEAASAR. Os dados recolhidos reportam-se ao ano de 2009.
Tabela 2.5 - População Servida 2009[19]
População Servida Sistemas de drenagem de águas residuais
Estação de tratamento de águas residuais (ETAR) % Continente 84 73 Norte 76 65 Centro 80 72 Lisboa 96 81 Alentejo 85 76 Algarve 88 84
Segundo Jaime Melo Baptista, presidente da Entidade Reguladora dos Serviços de Águas e Resíduos (ERSAR), no que toca ao saneamento de águas residuais, o país tem ainda um caminho a percorrer visto que a cobertura da população não é a desejada. Referiu também a obrigatoriedade de desenvolver um esforço no sentido de dotar o setor dos serviços de águas residuais em termos de algum investimento complementar e essencialmente uma melhoria de procedimentos operacionais que se traduzam em melhor eficiência no tratamento, com menor impacto ambiental[20].
Em 2009, 540 milhões de de águas residuais foram sujeitas a tratamento; cerca de 57% foram submetidas ao nível de tratamento secundário e 25% a nível terciário.
Segue-se por fim o tratamento primário e preliminar, representando este 17% da totalidade das águas residuais tratadas, conforme se pode ver na figura 2.8.
Figura 2.8- Águas Residuais Tratadas por Região Segundo Nível de Tratamento[2]
Verifica-se em todas as regiões a preponderância do tratamento secundário nos sistemas de tratamento de águas residuais. Salta à vista a região Norte e o relevo atingido pelo tratamento terciário (ou avançado), com cerca de 40% das águas residuais tratadas a serem submetidas a este nível máximo antes de serem rejeitadas para o ambiente[2].
Os dados aqui apresentados reportam-se ao ano de 2009 devido à dificuldade do INE obter informação atualizada relativa ao Inventário Nacional de Sistemas de Abastecimento de Águas e Águas Residuais (INSAAR), nas suas componentes física e económica[21].
2.5. Automatização, Controlo e Monitorização
Atualmente, a automação é considerada pelas empresas como uma mais-valia para o negócio. Através da correta aplicação da automação é possível otimizar os recursos empregues nos diversos sistemas de produção.
Um sistema automatizado é composto por 2 grandes grupos: Parte Operativa e Parte de Comando. A primeira é responsável por efetuar operações como consequência das ordens recebidas da parte de comando, enquanto a parte de comando tem como finalidade dar as ordens de saída em função do seu programa e das informações transmitidas pela parte operativa[22].
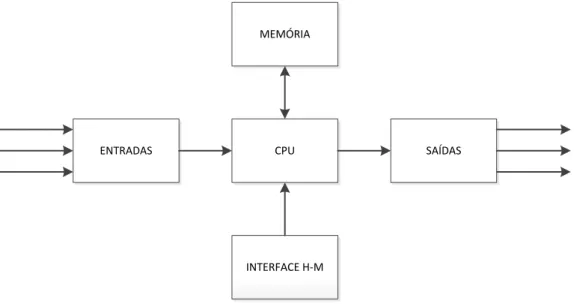
A estrutura de um autómato programável é facilmente percetível e sintetizada em cinco blocos, como se pode observar na figura 2.9. A Unidade de Processamento Central (CPU) é a parte de um controlador programável que recebe, descodifica, reserva, e
processa informação. É ainda responsável pela execução do programa de controlo armazenado na sua memória. Funciona do mesmo modo que a CPU de um computador normal, alterando o fato de serem utilizadas instruções especiais codificadas para executar as suas funções[23].
A memória contém o programa a ser executado pelo autómato, salvaguardando todas as instruções do programa mesmo quando não está a ser alimentado.
CPU MEMÓRIA
INTERFACE H-M
ENTRADAS SAÍDAS
Figura 2.9 - Estrutura de um Autómato Programável
Como é sabido, um automatismo é um dispositivo que permite o funcionamento de um sistema de forma autónoma, sendo a intervenção do operador reduzida ao mínimo indispensável. Várias vantagens são reconhecidas a estes sistemas, entre as quais:
Simplificar o trabalho;
Retirar operações complexas, perigosas e pesadas ao operador;
Alterações aos processos de fabrico;
Qualidade constante de fabrico;
Aumento de produção;
Economia de matéria-prima e energia.
Ao longo dos anos as ETAR tornaram-se mais eficientes e mais automatizadas no seu processo de funcionamento.
O interesse crescente pelo desenvolvimento dos processos físico-químicos e biológicos e pelos processos de controlo aplicados tornou isto possível. Uma vez que cada
ETAR pode ter processos de tratamento diferentes, o método de controlo tem que ser estudado consoante o caso, dando primazia aos aspetos de autonomia e eficiência do sistema[10].
Existem várias perturbações que podem afetar a operação destes sistemas. As mesmas podem estar relacionadas com características da composição e caudal do efluente, avarias nas bombas, descontinuidade na operação, variação do efluente a tratar, alterações no comportamento dos microrganismos, entre outras. Esta conjuntura implica a inevitabilidade de uma monitorização contínua, assim como o seu controlo para garantir que o propósito é satisfeito.
Entre os benefícios inerentes à implementação de um sistema de controlo para uma estação de tratamento de águas residuais, encontram-se [24]:
Qualidade do Efluente Tratado: garantia da manutenção da água tratada dentro dos valores essenciais para ser possível a sua descarga;
Economia do Processo: permite o uso adequado nas unidades de tratamento, tanto no consumo de nutrientes como no que toca ao consumo de energia;
Complexidade do Sistema: concede oportunidade ao trabalhador menos
qualificado, visto que torna processos complexos em sistemas mais básicos e intuitivos[25].
A definição de objetivos a alcançar com a implementação de um sistema de controlo é a primeira consideração a fazer. Os seguintes objetivos podem ser mencionados para um sistema de controlo:
Eliminação das Perturbações: não dependem de forma direta do operador: temperatura, presença de substâncias tóxicas, variações de caudal, variações na concentração do efluente. O sistema de controlo nestas condições tem como função eliminar o efeito negativo causado no processo.
Estabilidade do Processo: de modo a que o processo tenha uma evolução favorável é necessário controlar algumas variáveis que se vão alterando com o desenrolar do processo.
Otimização do Rendimento: ser permitida a alteração das condições
operacionais iniciais é deveras importante para a manutenção do processo dentro de limites que permitam um rendimento adequado[24][25].
Sistemas SCADA
O Sistema de Supervisão e Aquisição de Dados (SCADA) é uma tecnologia que se destina a cumprir tarefas de gestão e controlo em sistemas industriais, cujos elementos estejam espalhados e com relativa distância entre si.
Inicialmente, os sistemas SCADA permitiam informar periodicamente o estado do processo industrial, monitorizando os sinais representativos de medidas e estados de dispositivos através de um painel de lâmpadas e indicadores, sem qualquer interface aplicacional com o operador[26].
Com a evolução tecnológica, os computadores assumiram um papel de gestão na recolha e tratamento de dados, tornando possível a sua visualização num ecrã e a geração de comandos de programação para execução de funções de controlo complexas.
Atualmente utilizam-se tecnologias de computação e comunicação para automatizar a monitorização e controlo dos processos industriais, permitindo assim o rastreamento da informação do processo. A mesma é inicialmente obtida através de equipamentos de aquisição de dados. Posto isto, os dados são analisados e manipulados sendo posteriormente apresentados ao utilizador[27].
Os sistemas SCADA, representados pela figura 2.10, não são única e exclusivamente aplicados na maioria dos processos industriais, como indústria petrolífera, têxtil, metalúrgica, automóvel, eletrónica mas também em alguns processos experimentais como a fusão nuclear[28].
A importância atribuída e obtida é tal que deixaram apenas de ser vistos como meras ferramentas opcionais, ou de engenharia, e passaram a ser considerados como uma importante fonte de informação e crucial para a gestão industrial.
A eficiência do processo de controlo e monitorização é melhorada e o estado atual do sistema é disponibilizado ao utilizador em tempo real, através de um conjunto de
gráficos, previsões e relatórios, de modo a permitir a tomada de decisões operacionais apropriadas[26]. O utilizador interage com o sistema através de um terminal HMI (Interface Homem Máquina), que permite estabelecer o interface entre a máquina/processo e o operador. Esta interação é guiada e otimizada para que sejam sempre aproveitadas três características[22]:
Visualizar;
Um único local com as informações;
Evitar que o operador tenha que procurar o local onde está a informação pretendida.
Compreender;
Informação orientada;
Informação visual e mensagens de texto; Processo interativo.
Agir
Ação mais rápida e precisa;
Operador guiado de forma interativa evitando a consulta de manuais de procedimento.
2.6. Acionamento Industrial
No momento em que um motor entra em funcionamento, a corrente requerida à rede aumenta e pode provocar uma queda de tensão suscetível de afetar o funcionamento das cargas. De forma a evitar estes inconvenientes, em alguns casos, acima de uma determinada potência, é proibida a utilização de motores com arranque direto. Existem vários tipos de arranque que diferem de acordo com a especificidade da carga e do motor. A escolha é realizada mediante uma análise dos fatores elétricos, mecânicos e económicos[29][30]. Alguns dos tipos de arranque mais utilizados na redução das correntes de arranque são o arranque estrela-triângulo, o variador de velocidade e o arrancador progressivo.
2.6.1. Arranque direto
É de longe o método de arranque mais usado no mercado. Consiste apenas num contator e num relé eletrónico ou térmico e encontra-se retratado na figura 2.11. Este arranque é utilizado em aplicações para potências menores que 5,5kW.
A desvantagem deste método reside na elevada corrente de arranque, podendo a mesma atingir valores de 5 a 8 vezes a corrente nominal do motor[29][31]. No momento de arranque o binário é mais elevado do que o necessário para a grande maioria das aplicações.
2.6.2. Arranque
Este método reduz a corrente inicial e o binário inicial. Normalmente tem por base 3 contatores, um relé de sobrecarga e um temporizador para definir o tempo que estará na configuração inicial (figura 2.12). Este arranque é utilizado em aplicações para potências superiores a 5,5kW.
Figura 2.12 - Arranque Y-∆[29]
Os valores de corrente e binário inicial são reduzidos em cerca de 1/3, relativamente ao arranque direto.
Apenas é recomendável para aplicações onde o binário aumente com a velocidade ou seja, que não necessitem de uma elevada corrente e binário inicial.
Como se pode observar na figura 2.13, o problema deste método de arranque reside na transição de Y para . No momento da comutação, assinalado na figura com “2º”, observa-se um pico de corrente elevado, podendo inclusivamente ser de valor superior ao pico da corrente de arranque ainda que este seja de curta duração.
1º 2º
Figura 2.13 - Problema do Arranque Y-∆[32]
2.6.3. Variador de Velocidade
É um dispositivo de controlo que controla a velocidade de motores. Pode controlar a velocidade de um motor no seu arranque, frenagem, bem como durante todo o seu ciclo de funcionamento. A sua utilização é recomendável em todas as gamas de potência em que seja necessário um controlo da velocidade do motor.
O seu princípio de funcionamento assenta na conversão dos valores de entrada em frequência e tensão ajustável, de modo a controlar a velocidade pretendida para os motores. A frequência da tensão aplicada a um motor AC determina a velocidade do motor, baseado na equação[33]:
Onde:
N = velocidade de sincronismo f = frequência da rede
O motor é alimentado com tensão alternada de frequência variável obtida a partir de uma rede alternada monofásica ou trifásica de frequência fixa. O ajuste da largura de impulsos e da sua repetição permite regular a tensão e a frequência de alimentação do motor. O controlo da modulação de largura de impulso leva-se a cabo mediante o uso de microprocessadores. Na figura 2.14, pode ser observado o diagrama de blocos de um variador de velocidade[34].
REDE ELÉTRICA RETIFICADOR FILTRO
BARRAMENTO DC INVERSOR
3M
~
230 FN 400 FF 50 HZAC / DC FORNECE BAIXO RIPPLE ALISA A ONDA DC E AO INVERSOR
CC/AC TENSÃO TRIFÁSICA E FREQUÊNCIA AJUSTÁVEIS
Figura 2.14 - Modelo de um Variador de Velocidade
2.6.4. Arrancador Progressivo
O arrancador progressivo é constituído por tirístores no seu circuito de potência e por um microprocessador que controla o ângulo de disparo dos tirístores.
A velocidade aumenta de forma progressiva até se atingir o estado de regime permanente. A alimentação do motor, quando colocado em funcionamento, é realizada por aumento progressivo da tensão, permitindo assim uma redução do pico da corrente de arranque. A subida gradual da tensão de saída pode ser controlada por uma rampa de aceleração, geralmente regulável, permitindo a variação do seu valor. Através da figura 2.15 constata-se a redução e o controlo da corrente ao longo do tempo até a sua estabilização em regime permanente. Quanto maior for o tempo de aceleração, mais suave será o arranque e consequentemente menor será a corrente de arranque[31].
Apesar de serem utilizados em toda a gama de potências, os arrancadores progressivos são utilizados para potências superiores a 5,5kW, visto serem economicamente mais viáveis.
Figura 2.15 – Proveito retirado do uso do Arrancador Progressivo[35]
2.6.5. Comparação entre Arranque Direto, Arranque Y-∆ e Arrancador Progressivo
É facilmente percetível, através da figura 2.16, a principal desvantagem do arranque direto quando comparado com os seus concorrentes. A sua corrente de arranque toma valores completamente distintos do pretendido. Por sua vez, o arranque estrela-triângulo embora seja mais suave, dificulta a sua utilização se atentarmos no momento de transição e nos valores desproporcionais que a corrente de pico atinge.
Figura 2.16 – Formas de onda dos tipos de arranque [36]
2.6.6. Comparação entre Arranque Y-∆ e Arrancador Progressivo
Comparativamente com o método Y-∆, os arrancadores progressivos são muito mais flexíveis e evitam a corrente elevada que é gerada aquando da comutação de Y para ∆.
O arranque em Y-∆ tem uma performance limitada, visto que:
O momento de transição de estrela para triângulo resulta num pico de corrente elevado ainda que de curta duração;
O binário de arranque não pode ser ajustado de acordo com o motor e as características da carga;
Não proporciona uma paragem suave.
A sua principal vantagem é:
Quando usado para iniciar uma carga de valor bastante reduzido, conseguem reduzir a corrente para um valor mais reduzido que o arrancador progressivo. Contudo, os transientes de corrente continuam a existir.
2.6.7. Variador de Velocidade vs. Arrancador Progressivo
Quando se pretende escolher entre um variador de velocidade ou um arrancador progressivo deve-se ter sempre em conta a aplicação, os requisitos do sistema e o seu custo. Assim sendo, pode-se dividir e escolher as aplicações favoráveis a cada tipo de arranque como é possível observar na tabela 2.6.
Tabela 2.6 - Tipos de Arranque e Utilização Consoante a Aplicação[31]
Aplicações
Variador de Velocidade Arrancador Progressivo
Controlo total da velocidade; Controlo do binário e velocidade
requeridas apenas no arranque;
Poupança de energia; Redução das correntes inrush associadas às
altas potências;
Preço mais em conta quando são aplicações que apenas necessitam de controlar o binário e a velocidade no arranque.
Atendendo às características pretendidas para a aplicação, também é possível optar pelo melhor arranque para responder ao solicitado, conforme a tabela 2.7 indica:
Tabela 2.7 – Seleção do Tipo de Arranque Consoante o Objetivo Pretendido[31]
Caraterísticas Arrancador Progressivo Variador de Velocidade
Custo Inicial Reduzido Elevado
Reduz Tensão Inicial Sim Sim
Reduz Corrente Inicial Sim Sim
Reduz Energia Usada Alguma Mais
Prolonga Vida Útil Sim Sim
Varia Velocidade Não Sim
Eficiência 99,5% ~ 95% a 97%
Complexidade Menor Maior
2.7. Sensores
São dispositivos sensíveis a alguma forma de energia que precisa de ser medida em termos de grandeza física, como temperatura, pressão, velocidade, corrente, aceleração, nível, etc. O aparecimento dos sensores contribuiu para a automatização industrial pois permitiu a conversão de uma grandeza não elétrica numa grandeza elétrica que pode ser processada mediante o automatismo certo. Um sensor nem sempre possui as características elétricas necessárias para ser utilizado num sistema de controlo. Usualmente, isso é obtido através de um circuito de interface, incumbido de realizar o condicionamento do sinal, de modo a que o mesmo possa ser lido por um controlador.
Existem dois tipos distintos de sensores, caraterizados pela saída que apresentam: analógicos ou digitais. No primeiro caso, o sensor pode assumir qualquer valor no seu sinal de saída ao longo do tempo, desde que esteja dentro da sua faixa de operação. No caso de o sensor ser digital, apenas assume dois valores na saída, que podem ser interpretadas como zero ou um. Só consegue indicar se foi atingido um valor pré-determinado, ou não[37].
Uma breve análise contendo as vantagens e aplicações de cada um pode ser observada na tabela 2.8.
2.7.1. Sensor de nível
Os dispositivos de medida de nível aferem a posição da superfície de um líquido/sólido sobre um ponto de referência. O seu propósito é baseado na abertura/fecho de um circuito consoante o nível sobe ou desce. Podem atuar de forma discreta ou contínua, detetando quando o líquido está numa altura certa ou fornecendo um sinal proporcional ao nível do líquido, respetivamente.
A medição do nível tem relevância, por exemplo, para processos relacionados com:
Proteção ambiental;
Segurança de um processo;
Controlo de tanques ou reservatórios.
Um sensor de nível pode ser concebido de diferentes maneiras, interferindo no processo de medição e no modo como é instalado. Existem vários sensores de níveis, destacando-se em aplicações industriais:
Flutuador
Na gama dos flutuadores encontram-se os sensores: com acionamento de mercúrio, com acionamento magnético reed switch, com acionamento por potenciómetro e nível boia.
O flutuador com acionamento de mercúrio, quando o nível do líquido sobe e toca na parte inferior da boia, inclina-se e nesse preciso momento o interruptor de mercúrio abre ou fecha um contacto.
O flutuador com acionamento magnético consiste num interruptor formado por duas lâminas ferromagnéticas hermeticamente seladas numa cápsula de vidro. À medida que a boia sobe ou desce devido à variação do líquido, gera-se um campo magnético que atua sobre as lâminas de modo a que por indução fechem o circuito encostando uma na outra[38].
O acionamento por potenciómetro recorre ao mesmo para ser ligado na extremidade do flutuador, variando a tensão proporcionalmente ao nível do líquido.
Por fim, o flutuador de nível boia tem o seu princípio de funcionamento assente no mesmo pressuposto que o flutuador com acionamento de mercúrio. A diferença reside na alta capacidade de comutação, providenciada pela utilização de um micro interruptor[37].
Condutivos
O seu funcionamento assenta em dois elétrodos, um de referência e outro sensor. No momento em que o líquido atinge o elétrodo sensor, forma-se uma resistência entre o mesmo e os elétrodos, fechando assim o circuito e consequentemente enviando um sinal para o circuito de controlo[37].
Pressão Hidrostática
Os sensores deste tipo podem ser incluídos em dois grupos: pressão hidrostática e pressão diferencial.
O primeiro é aplicado na medição da pressão exercida por um líquido, o que significa que quanto maior for o peso do líquido, maior será a sua pressão. A pressão exercida origina o movimento de uma peça flexível (diafragma) e a sua posição é medida. O sinal gerado está relacionado com o nível de líquido no tanque.
Por sua vez, o sensor de nível por pressão diferencial é composto por sensores de pressão com o objetivo de obter uma medição no topo do reservatório e no seu fundo. O nível do líquido é proporcional à pressão no fundo do tanque e, como tal, pode-se inferir o nível através dessa diferença de pressões[37].
Capacitivo
O princípio de funcionamento do sensor capacitivo consiste na alteração do valor da sua capacidade, originada pela variação do nível entre ele e a parede do reservatório. Ao recorrer-se a este tipo de sensor considera-se o reservatório um condensador de dimensões elevadas. Como[39]:
Onde:
C = Capacidade
do Líquido Armazenado A = Área das Placas Condutoras
![Figura 2.8- Águas Residuais Tratadas por Região Segundo Nível de Tratamento[2]](https://thumb-eu.123doks.com/thumbv2/123dok_br/17594038.819748/38.892.236.630.173.450/figura-águas-residuais-tratadas-região-segundo-nível-tratamento.webp)
![Figura 2.12 - Arranque Y-∆[29]](https://thumb-eu.123doks.com/thumbv2/123dok_br/17594038.819748/44.892.229.709.458.904/figura-arranque-y.webp)
![Figura 2.15 – Proveito retirado do uso do Arrancador Progressivo[35]](https://thumb-eu.123doks.com/thumbv2/123dok_br/17594038.819748/47.892.284.646.107.384/figura-proveito-retirado-do-uso-do-arrancador-progressivo.webp)
![Figura 3.17 - Modo de Ligação dos Suportes de Expansão[66]](https://thumb-eu.123doks.com/thumbv2/123dok_br/17594038.819748/68.892.126.729.108.543/figura-modo-de-ligação-dos-suportes-de-expansão.webp)





