Ajuste dos Parâmetros de Controladores
Suplementares de Amortecimento Utilizando o
Algoritmo
Bacterial Foraging Optimization
Elenilson de Vargas Fortes
1, Ednei Luiz Miotto
2, Percival Bueno de Araujo
3,
Carlos Eduardo Pupin
41Instituto Federal de Educação, Ciência e Tecnologia de Goiás – IFG, Rua Riachuelo nº 2.090, Samuel Graham, 75804-020, Jataí, GO, Brasil. 2Universidade Tecnológica Federal do Paraná – UTFPR, Rua Cristo Rei nº 19, Vila Becker, 85902-490, Toledo, PR, Brasil.
3Universidade Estadual Paulista – UNESP, Caixa Postal nº 31, 15385-000, Ilha Solteira, SP, Brasil.
4Universidade Comunitária da Região de Chapecó – UNOCHAPECÓ, Av. Senador Attílio Fontana nº 591, Chapecó, SC, Brasil.
Maxwell Martins de Menezes
55Universidade do Oeste de Santa Catarina – UNOESC, Rua Getúlio Vargas, nº 2125, 89600-000, Joaçaba, SC, Brasil.
Resumo O principal objetivo desse trabalho está no ajuste de forma simultânea e coordenada dos parâmetros de Estabilizadores de Sistema de Potência e do conjunto Thyristor Controlled Series Capacitor - Power Oscillation Damping utilizando o algoritmo Bacterial Foraging Optimization. O ajuste é realizado para se introduzir amortecimento especificado aos modos oscilatórios de baixa frequência presentes no sistema elétrico de potência. Para a modelagem do sistema multimáquinas é utilizado o Modelo de Sensibilidade de Corrente, que é baseado na Lei de Kirchhoff para as correntes. Simulações são realizadas em um sistema de potência teste e a análise dos resultados comprova que a metodologia proposta atende de forma eficiente os objetivos apresentados neste trabalho.
Palavras-chaves Estabilidade a pequenas perturbações, TCSC, PSS, POD, Bacterial foraging optimiztion.
I.INTRODUÇÃO
A manutenção de níveis adequados de tensão e frequência, necessários ao bom funcionamento dos equipamentos elétricos, bem como a garantia de entrega de energia elétrica com o menor número de interrupções possível, são princípios básicos de um sistema elétrico de potência (SEP) confiável e seguro. O conjunto dos fatores citados garante a estabilidade do SEP e a satisfação dos consumidores de energia.
A estabilidade está relacionada com o comportamento de um SEP quando submetido a uma perturbação. Se a perturbação é de pequena magnitude (por exemplo, variações de carga ao longo do dia que levam a consequentes ajustes de geração) trata-se da estabilidade a pequenas perturbações, que é o foco deste trabalho [1].
Elenilson de Vargas Fortes, elenilson.fortes@ifg.edu.br, Tel. Tel. +55-64-3632-860, Ednei Luiz Miotto, edneimiotto@utfpr.br, Tel. +55-45-3379-6800, Percival Bueno de Araujo, percival@dee.feis.unesp.br, Tel. +55-18-3743-1000, Carlos Eduardo Pupin, carlos.pupin@unochapeco.edu.br, Tel. +55-018-3321-8000; Maxwell Martins de Menezes, maxwell.menezes@unoesc.edu.br, Tel.+55-49-3351-2000.
Este trabalho foi parcialmente financiado pela Coordenação de Aperfeiçoamento de Pessoal de Nível Superior - CAPES.
Uma pequena perturbação pode ser descrita matematicamente como um pequeno desvio no estado do sistema. Assim, todas as equações que descrevem o sistema podem ser linearizadas em torno de um ponto de equilíbrio e, dessa forma, todas as propriedades aplicáveis à análise de sistemas lineares podem ser utilizadas [1].
Essa característica possibilita representar o SEP por modelos lineares, como por exemplo, o Modelo de Sensibilidade de Corrente (MSC), cujo princípio fundamental é a aplicação do balanço nodal de corrente, também conhecido como Lei de Kirchhoff das correntes nos nós [2], [3].
A presença de oscilações eletromecânicas de baixa frequência (principalmente as de modo local e modo interárea) pode comprometer a operação do SEP, motivo pelo qual, estratégias de controle para se introduzir amortecimento a estas oscilações devem ser aplicadas.
Os primeiros passos para o controle dessas oscilações foram dados em [4], cujos autores introduziram os conceitos básicos para o projeto de Estabilizadores de Sistema de Potência (ESPs). Tais estabilizadores são largamente e efetivamente utilizados para o amortecimento de oscilações eletromecânicas, atuando junto aos reguladores automáticos de tensão (RAT) dos geradores. Devido a isto, estes estabilizadores possuem grande atuação nos modos de oscilação local, não atuando de forma eficaz no modo de oscilação interárea.
Com os avanços da eletrônica de potência, novos dispositivos automáticos de compensação foram sendo incorporados aos SEP para melhorar seu controle e torná-lo mais flexível e seguro. São os chamados Flexible AC Transmission Systems (FACTS), onde se destaca o Capacitor Série Controlado a Tiristor (TCSC) [5], [6]. Estudos posteriores mostraram que se a este dispositivo for acoplado um controlador Power Oscillation Damping (POD), é possível fornecer amortecimento suplementar às oscilações do SEP, principalmente as do tipo interárea.
amortecimento aos modos oscilatórios do SEP, o ajuste de seus parâmetros é de fundamental importância. Métodos de otimização e de controle robusto estão sendo utilizados com sucesso por pesquisadores do SEP para o ajuste de parâmetros de controladores, como uma alternativa aos métodos clássicos. Em [7] é utilizado algoritmo genético para o controle de tensão e potência reativa em barras do SEP. Os parâmetros de controladores suplementares de amortecimento foram encontrados utilizando Particle Swarm Optimization (PSO) conforme detalhado em [8]. Em [9] é tratada a alocação de dispositivos FACTS no SEP através do algoritmo tabu search, enquanto que em [10] é realizado o projeto simultâneo e coordenado de controladores suplementares ESPs e PODs baseado na teoria de controle robusto e estruturado na forma de Inequações Matriciais Lineares (LMIs).
Neste trabalho será utilizado para o ajuste dos parâmetros dos controladores um método de otimização baseado no algoritmo Bacterial Foraging Optimization (BFO) [11]. Este método foi inicialmente aplicado em [12] para o ajuste de controladores PID. Em [13] o BFO é utilizado no ajuste de parâmetros de ESPs e TCSC – POD, sendo que tanto o SEP quanto seus controladores são modelados por injeção de potência (Modelo de Sensibilidade de Potência – MSP). Em [14] é abordado o surgimento de interações indesejadas quando o ajuste dos parâmetros é feito de forma individual, motivo pelo qual neste trabalho se fará um ajuste coordenado e simultâneo de todos os controladores instalados no SEP, utilizando-se como ferramenta o algoritmo BFO.
Neste contexto, este trabalho utilizará o BFO como método de otimização para determinar os parâmetros dos dispositivos ESPs e TCSC – POD, sendo que o SEP e todos os seus controladores serão modelados pelo Modelo de Sensibilidade de Corrente (MSC).
Para a validação da metodologia proposta foram realizadas simulações utilizando-se o software MatLab.
II.MODELO DE SENSIBILIDADE DE CORRENTE PARA SISTEMAS MULTIMÁQUINAS
O MSC é uma ferramenta de análise linear para SEPs, sendo que seu conceito fundamental é a aplicação do balanço nodal de corrente, também conhecido como Lei de Kirchhoff das correntes nos nós. Este balanço deve ser satisfeito durante todo e qualquer processo dinâmico no SEP e é aplicado para a obtenção das equações algébricas do referido modelo [2], [3].
A modelagem multimáquinas utiliza como variáveis de estado 𝑥 para cada gerador: a velocidade angular (), o ângulo interno do rotor do gerador (), a tensão interna do eixo em quadratura (𝐸′𝑞) e a tensão de campo do gerador
(𝐸𝑓𝑑). As entradas 𝑢 são a potência mecânica de entrada
(𝑃𝑚) e a tensão de referência (𝑉𝑟𝑒𝑓) do regulador
automático de tensão de cada gerador. A magnitude (𝑉) e a fase () da tensão terminal das barras do SEP são as variáveis algébricas 𝑧 do modelo linearizado.
Para representar, o sistema elétrico modelado pelo MSC, no domínio do tempo, considere um sistema multimáquinas composto por 𝑛𝑔 geradores e 𝑛𝑏 barras e os vetores dados pelas equações (1), (2) e (3).
∆𝑥 = [[∆𝜔1… ∆𝜔𝑛𝑔]𝑡[∆𝛿1… ∆𝛿𝑛𝑔]𝑡[∆𝐸′𝑞1… ∆𝐸′𝑞𝑛𝑔]𝑡
[∆𝐸𝑓𝑑1… ∆𝐸𝑓𝑑𝑛𝑔]𝑡]𝑡 (1)
∆𝑢 = [[∆𝑃𝑚1… ∆𝑃𝑚𝑛𝑔]𝑡[∆𝑉𝑟𝑒𝑓1… ∆𝑉𝑟𝑒𝑓𝑛𝑔]𝑡]
𝑡
(2)
∆𝑧 = [[∆𝜃1… ∆𝜃𝑛𝑏]𝑡[∆𝑉1… ∆𝑉𝑛𝑏]𝑡]𝑡 (3)
Assim, o seu comportamento dinâmico pode ser representado no domínio do tempo conforme (4), onde são considerados os vetores de variáveis de estado (𝑥), de entradas (𝑢) e de variáveis algébricas (𝑧).
[∆𝑥̇0 ] = [𝐽1 𝐽2𝐽3 𝐽4] [∆𝑥∆𝑧] + [𝐵1𝐵2][∆𝑢] (4)
A representação no espaço de estados é obtida pela eliminação do vetor de variáveis algébricas (𝑧) em (4), resultando em (5).
∆𝑥̇ = (𝐽1 − 𝐽2𝐽4−1 𝐽3)∆𝑥 + (𝐵1 − 𝐽2𝐽4−1𝐵2)∆𝑢 (5)
O MSC possui como característica positiva a facilidade de inclusão de novos dispositivos, sendo desnecessária a representação de uma barra infinita. Informações mais detalhadas sobre as equações (1) – (5) que representam o sistema de potência multimáquinas modelado pelo MSC podem ser obtidas em [2], [3].
III.MODELO DO DISPOSITIVO FACTSTCSC
O dispositivo FACTS TCSC é um compensador série que atua reduzindo a impedância da linha de transmissão onde é inserido e geralmente é representado por um modelo linear de primeira ordem nos estudos de estabilidade a pequenas perturbações [6]. A reatância do TCSC pode ser modulada para controlar o fluxo de potência em linhas de transmissão e também contribuir para o amortecimento das oscilações eletromecânicas [5]. Um TCSC basicamente consiste em um compensador série composto por uma capacitância fixa em paralelo com um reator controlado a tiristores, conforme esquematizado na Fig. 1 [5].
Fig. 1. Estrutura básica do TCSC.
Porém, a atuação do dispositivo TCSC não é suficiente para introduzir amortecimento às oscilações de baixa frequência do SEP, sendo necessária para este fim a inclusão de controladores suplementares de amortecimento, que neste caso são representados pelo ESP (inseridos na malha de controle dos RATs das unidades geradoras) e pelo POD (adicionado à malha de controle do dispositivo FACTS).
A estrutura dos controladores ESP e POD é mostrada na Fig. 2.
Fig. 2. Estrutura dos controladores ESP e POD
No caso do ESP 𝑒 são as variações dos desvios da velocidade angular do rotor do gerador de instalação (∆𝜔𝑘).
Em se tratando do POD 𝑒 são os desvios da potência ativa da linha de transmissão de instalação do dispositivo (∆𝑃𝑘𝑚).
Quanto às saídas, ∆𝑦 no caso do ESP é a tensão 𝑉𝑠,
inserida como sinal adicional à malha de controle do RAT. Para o POD o sinal de saída é a variação da reatância 𝑋𝑃𝑂𝐷,
inserida como um sinal estabilizante no modelo dinâmico do TCSC conforme representado na Fig. 3. Nesta figura a constante de tempo 𝑇𝑇𝐶𝑆𝐶 representa o atraso inerente do
controlador do dispositivo TCSC, ∆𝑋𝑟𝑒𝑓 é utilizado como
sinal de referência e ∆𝑋𝑇𝐶𝑆𝐶 é a variável de estado associada
ao TCSC.
Fig. 3. Diagrama de blocos do TCSC.
A representação do SEP por meio do MSC (dado na equação (4)), incluindo o controlador ESP e o conjunto TCSC – POD, permite realizar a análise da estabilidade a pequenas perturbações. Os parâmetros dos controladores ESP e POD serão determinados de forma simultânea e coordenada pelo algoritmo BFO. Tais parâmetros consistem dos ganhos 𝑘 e constantes de tempo 𝑇1 = 𝑇3 e 𝑇2 = 𝑇4 para cada controlador instalado no SEP. Tais parâmetros, determinados pelo algoritmo proposto, deverá posicionar os autovalores relacionados com cada controlador instalado, em uma região desejada do plano complexo. Essa região é determinada pelos coeficientes de amortecimento especificados (𝑖𝑠) mínimos para cada autovalor. Neste trabalho foi definido para o modo local 𝑙𝑜𝑐𝑎𝑙 = 5% e para o modo interárea 𝑖𝑛𝑡𝑒𝑟𝑎𝑟𝑒𝑎 = 10%. A constante de tempo 𝑇𝑤 foi especificada em 1
segundo.
IV.BACTERIAL FORAGING OPTIMIZATION
O algoritmo BFO é baseado no comportamento da bactéria Escherichia Coli, conhecida como E. Coli, que utilizando processos de localização, manipulação e ingestão, buscam encontrar áreas ricas em alimento [11]. O algoritmo BFO pode ser dividido em quatro etapas: quimiotaxia, aglomeração, reprodução e dispersão [12], [15].
A bactéria pode se deslocar de dois modos, nado ou giro, sendo esta etapa denominada de quimiotaxia. No nado a bactéria busca convergir para uma determinada região, enquanto que no processo de giro é realizado um deslocamento aleatório em torno da região [8]. Em (6) é mostrado o deslocamento de uma bactéria com certo passo de deslocamento 𝐶(𝑖) em certa direção aleatória especificada por um determinado giro 𝜙(𝑗).
𝜃𝑖(𝑗 + 1, 𝑘, 𝑙) = 𝜃𝑖(𝑗, 𝑘, 𝑙) + 𝐶(𝑖)𝜙(𝑗) (6)
Na equação (6), o termo 𝜃𝑖(𝑗, 𝑘, 𝑙) refere-se à bactéria na i-ésima posição, j-ésima etapa de quimiotaxia, k-ésima etapa de reprodução e l-ésima etapa de dispersão.
A equação (7) descreve o giro que é composto por um vetor aleatório Δ(𝑖) em que cada elemento especificado será representado por valores aleatórios entre −1 e 1.
𝜙(𝑗) =√Δ𝑇Δ(𝑗)(𝑖)×Δ(𝑖) (7)
Estes tipos de bactérias deslocam-se de forma organizada e estruturada, e se adaptam facilmente às regiões de busca (ver [12]) e para cada deslocamento 𝜃𝑖(𝑗, 𝑘, 𝑙) é calculada a
sua saúde, conforme (8), que representará a função objetivo do problema de otimização.
𝐽(𝑖, 𝑗 + 1, 𝑘, 𝑙) = 𝐽(𝑖, 𝑗, 𝑘, 𝑙) + 𝐽𝑐𝑐(𝜃𝑖(𝑗 + 1, 𝑘, 𝑙)) (8)
A segunda etapa chamada de aglomeração representa a tendência de organização entre as bactérias e é definida em (9), sendo 𝑆 o número de bactérias e 𝑑 o número de parâmetros otimizados. O valor da função de aglomeração tende a zero conforme há uma tendência das bactérias convergirem para um ponto de solução ótima.
𝐽𝑐𝑐(𝜃𝑖(𝑗 + 1, 𝑘, 𝑙)) =
∑ −𝑑𝑎𝑡𝑡𝑟𝑎𝑐𝑡× exp (−𝑤𝑎𝑡𝑡𝑟𝑎𝑐𝑡∑(𝜃𝑚− 𝜃𝑚𝑖)2) + 𝑑
𝑖=1 𝑆
𝑖=1
∑ −ℎ𝑟𝑒𝑝𝑒𝑙𝑙𝑎𝑛𝑡× exp (−𝑤𝑟𝑒𝑝𝑒𝑙𝑙𝑎𝑛𝑡∑(𝜃𝑚− 𝜃𝑚𝑖)2) (9) 𝑑
𝑖=1 𝑆
𝑖=1
Na equação (9), os coeficientes 𝑑𝑎𝑡𝑡𝑟𝑎𝑐𝑡, ℎ𝑟𝑒𝑝𝑒𝑙𝑙𝑎𝑛𝑡,
𝑤𝑎𝑡𝑡𝑟𝑎𝑐𝑡, 𝑤𝑟𝑒𝑝𝑒𝑙𝑙𝑎𝑛𝑡são constantes que regulam a forma de
atração ou repulsão entre as bactérias. Neste trabalho serão utilizados para estas constantes os valores encontrados em [12], sendo 𝑑𝑎𝑡𝑡𝑟𝑎𝑐𝑡= ℎ𝑟𝑒𝑝𝑒𝑙𝑙𝑎𝑛𝑡= 0,1, 𝑤𝑎𝑡𝑡𝑟𝑎𝑐𝑡= 0,2 e
𝑤𝑟𝑒𝑝𝑒𝑙𝑙𝑎𝑛𝑡= 10.
A terceira etapa é a reprodução que ocorre no final do processo de quimiotaxia. Nesta etapa as bactérias são divididas em dois grupos, as bactérias mais ou menos saudáveis, sendo que as mais saudáveis são reproduzidas e substituem as menos saudáveis.
Para cada etapa de reprodução tem-se início uma nova etapa de quimiotaxia e em seu final uma porcentagem de bactérias menos saudáveis é eliminada. Este processo de eliminação de bactérias menos saudáveis dá nome à quarta etapa: dispersão.
Ao eliminar as bactérias menos saudáveis são iniciadas novamente as etapas de quimiotaxia e de reprodução. Mais detalhes sobre o algoritmo BFO e seu equacionamento podem ser encontrados em [12], [15].
Conforme explicação dada na seção anterior, um dos objetivos desse trabalho é encontrar um ajuste ótimo dos parâmetros dos controladores suplementares ESP e POD de forma simultânea e coordenada, utilizando o algoritmo BFO.
A função objetivo utilizada pelo algoritmo BFO é baseada no menor valor encontrado dentro do somatório dos autovalores de interesse, em função do valor absoluto da diferença entre o autovalor especificado (𝜆𝑖𝑠) e seu
respectivo autovalor calculado (𝜆𝑖).
k
𝑠𝑇𝑤1 + 𝑠𝑇𝑤
1 + 𝑠𝑇3
1 + 𝑠𝑇4
∆𝑒 1 + 𝑠𝑇1 ∆𝑦
1 + 𝑠𝑇3
1 1 + 𝑠𝑇𝑇𝐶𝑆𝐶
∆𝑋𝑇𝐶𝑆𝐶 +
+ ∆𝑋𝑃𝑂𝐷
Pode-se dizer que a função objetivo dada em (10) é equivalente à saúde 𝐽(𝑖, 𝑗, 𝑘, 𝑙) de cada bactéria. Portanto, para cada posição 𝜃𝑖(𝑗, 𝑘, 𝑙) de uma bactéria é também
calculada a sua saúde. Assim, a bactéria que possuir a função objetivo de menor valor é a bactéria mais saudável, sendo uma possível solução do problema de otimização.
𝐹𝑜 = min ∑|𝜆𝑖𝑠− 𝜆𝑖| 𝑛𝑝
𝑖=1
(10)
O conjunto de restrições (11) é aplicado em (10), onde
𝜆𝑖= 𝜎𝑖+ 𝑗𝜔𝑖 é a representação do autovalor de interesse
calculado. A restrição 𝜎𝑖≤ 0 assegura que todos os autovalores possuem parte real negativa, o que garantirá a estabilidade do SEP analisado, independente dos parâmetros encontrados para os controladores pelo algoritmo BFO.
𝜉𝑖≥ 𝜉𝑖𝑠
𝜎𝑖≤ 0
𝐾min≤ 𝐾 ≤ 𝐾max (11)
𝑇1min≤ 𝑇1≤ 𝑇1max
𝑇2min≤ 𝑇2≤ 𝑇2max
Neste ponto é importante salientar que os parâmetros (𝑇1, 𝑇2e 𝐾) de cada controlador ajustados pelo algoritmo
BFO não garantem uma solução ótima para o problema. A solução encontrada deve apenas atender ao critério de parada que é a verificação de 𝜉𝑖≥ 𝜉𝑖𝑠para todo autovalor de
interesse.
A formulação apresentada foi implementada
computacionalmente para se realizar simulações e validar o método de ajuste proposto.
V.SIMULAÇÕES E RESULTADOS
Para validar os parâmetros dos controladores ESP e POD ajustados pelo algoritmo BFO algumas simulações foram realizadas em um sistema testes conhecido na literatura como sistema simétrico de duas áreas, cujo diagrama unifilar é ilustrado na Fig. 4. Este SEP possui duas áreas interligadas por três linhas de transmissão longas de alta reatância indutiva e é composto por 4 geradores e 10 barras. Seus dados completos podem ser encontrados em [16].
Fig. 4. Diagrama unifilar: Sistema simétrico de duas áreas.
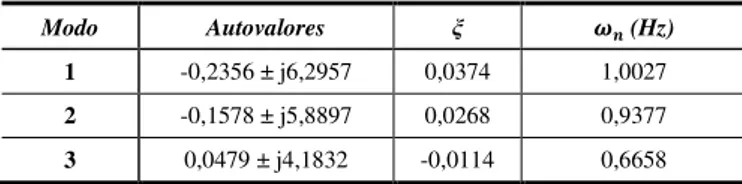
Na Tabela I são apresentados os autovalores dominantes do sistema simétrico para um determinado ponto de operação, sem a consideração de equipamentos ESPs e TCSC-POD (caso base).
TABELA I
AUTOVALORES DOMINANTES,AMORTECIMENTO E FREQUÊNCIAS.
Modo Autovalores ξ 𝝎𝒏 (Hz)
1 -0,2356 ± j6,2957 0,0374 1,0027 2 -0,1578 ± j5,8897 0,0268 0,9377 3 0,0479 ± j4,1832 -0,0114 0,6658
FONTE:DADOS ORIUNDOS DA PESQUISA.
Seguindo a proposta desse trabalho, controladores ESPs em conjunto com dispositivos TCSC – POD serão instalados no sistema teste com o objetivo de contribuir para a estabilização do modo interárea, bem como aumentar as taxas de amortecimento dos modos locais.
Os coeficientes utilizados na inicialização do algoritmo BFO estão listados na Tabela II [12].
Antes da apresentação dos resultados encontrados pelo algoritmo BFO, será necessário definir os coeficientes utilizados em sua inicialização [12] conforme destaca Tabela II.
TABELAII
COEFICIENTES DE INICIALIZAÇÃO DO ALGORITMO BFO.
Parâmetros do BFO
Número de bactérias (S) 10 Número de nados (𝑛𝑠) 4 Passos de quimiotaxia (𝑛𝑐) 10 Passos de reprodução (𝑛𝑟𝑐) 4
Passos de dispersão (𝑛𝑒𝑑) 2 Probabilidade de dispersão (𝑝𝑒𝑑) 0,5
FONTE:ADAPTADO DE [13].
Os limites relacionados com as restrições especificadas em (11) são apresentados na Tabela III. Cabe destacar que não foram utilizados métodos adicionais para a determinação desses valores, limitando-se apenas à realização de simulações computacionais empíricas.
TABELAIII
LIMITES DOS PARÂMETROS DOS CONTROLADORES ESP E POD.
Parâmetros ESP POD
𝑇1min−𝑇1max 0,05 – 1,00
𝑇2min− 𝑇2max
𝐾min−𝐾max 1,00 – 5,00 0,05 – 0,20 FONTE:ADAPTADO DE [13].
Para sanar a instabilidade do SEP teste (decorrente de um modo de oscilação interárea), será instalado um dispositivo FACTS TCSC em conjunto com um controlador POD para atuar de forma efetiva no amortecimento desse modo.
Será considerada uma compensação de 10% na linha de transmissão onde será instalado o conjunto TCSC – POD (no caso deste trabalho, entre as barras 7 e 8 – ver diagrama unifilar mostrado na Fig. 4). Para a localização desses dispositivos no SEP foram realizados estudos adicionais, não descritos neste trabalho, baseado na teoria da distância entre polos e zeros da função de transferência em malha aberta do controlador POD (mais detalhes sobre este método podem ser encontrados em [17]).
para se garantir uma taxa de amortecimento mínima para estes modos, serão alocados controladores ESPs nas malhas de controle dos RATs das unidades geradoras escolhidas para a instalação. Se for considerado que será instalado um controlador ESP para cada modo local com amortecimento abaixo de 5%, então serão necessários dois dispositivos ESPs para o sistema de potência teste.
A escolha das unidades para a instalação dos ESPs foi feita a partir dos fatores de participação de cada um dos quatro geradores que compõem o sistema analisado [18]. A análise dos fatores de participação indicou que os geradores
𝐺2 e 𝐺3 são os que mais influenciam nos modos locais fracamente amortecidos mostrados na Tabela I (mais detalhes sobre fatores de participação podem ser encontrados em [19]). Portanto, no sistema teste será considerado a atuação conjunta e coordenada dos dispositivos ESPs nos geradores
𝐺2 e 𝐺3, com o dispositivo TCSC – POD instalado entre as barras 7 e 8.
Na Tabela IV são apresentados os valores dos parâmetros dos controladores ESPs e POD obtidos pelo algoritmo BFO.
TABELA IV
PARÂMETROS DOS DISPOSITIVOS ESPS E TCSC-POD.
Dispositivo 𝑻𝟏= 𝑻𝟑 𝑻𝟐= 𝑻𝟒 𝑲
ESP G2 0,84411 0,93256 2,6305
ESP G3 0,14308 0,18315 5,0000
TCSC – POD 0,29060 0,87736 0,15912
FONTE:DADOS ORIUNDOS DA PESQUISA.
Os controladores ESPs e POD, ajustados com os valores dados na Tabela IV, foram colocados em operação e, a partir de novas simulações, foram calculados os autovalores do sistema teste para esta condição. Os resultados obtidos são mostrados na Tabela V.
TABELA V
AUTOVALORES DOMINANTES,COEFICIENTE DE AMORTECIMENTO E
FREQUÊNCIA NATURAL –CONTROLADORES ADICIONAIS EM OPERAÇÃO.
Modo Autovalores ξ 𝝎𝒏 (Hz)
1 -0,3721 ± j6,3552 0,0585 1,0132 2 -0,3178 ± j6,0272 0,0526 0,9606 3 -0,4159 ± j3,8232 0,1082 0,6121
FONTE:DADOS ORIUNDOS DA PESQUISA.
Observe na Tabela V que o modo interárea, antes instável, tornou-se estável. Além disso, tanto os modos locais quanto o modo interárea atingiram o grau de amortecimento especificado em projeto.
Na Fig. 5 são mostradas as localizações no plano complexo dos autovalores de interesse para o caso base (representados por ∆) e aqueles obtidos após a instalação dos controladores nos sistema teste (destacados por ). Fica evidente que tanto os modos locais quanto o modo interárea sofreram deslocamentos compatíveis com o grau de amortecimento desejado (maiores que 5% e 10% para modos locais e interárea, respectivamente) durante a fase de ajuste dos parâmetros dos controladores pelo algoritmo BFO.
As variações angulares dos geradores 1 (𝐺1) e 3 (𝐺3) em relação ao gerador 4 (𝐺4) (referência para o SEP teste), são mostradas na Fig. 6, após a ocorrência de uma perturbação de
0,05 pu na potência mecânica do 𝐺4. Da análise destas curvas conclui-se novamente pela estabilidade do sistema teste.
Fig. 5. Deslocamento dos autovalores do sistema teste.
Fig. 6. Variação angular dos geradores 𝐺1 e 𝐺3.
VI.CONCLUSÕES
Neste trabalho foi apresentada uma técnica de ajuste dos parâmetros dos controladores ESPs e TCSC-POD utilizando o algoritmo BFO. Dos resultados obtidos concluiu-se que este algoritmo se mostrou eficaz ajustando de forma simultânea e coordenada os parâmetros destes controladores (𝐾, 𝑇1= 𝑇3 e
𝑇2= 𝑇4) para um nível de amortecimento anteriormente
estabelecido em projeto, 5% para os modos locais e 10%
para o modo interárea, corroborando que o BFO pode ser utilizado como alternativa frente aos métodos clássicos de ajustes dos controladores. Esta afirmação é ainda mais verdadeira nos casos em que se deseja ajustar mais de um controlador suplementar de amortecimento.
Entretanto, é importante salientar que nem sempre algoritmos baseados em metaheurísticas (caso do BFO), fornecerão respostas ótimas para os problemas que se pretende resolver. Estes métodos geralmente tendem a convergir para uma solução, contudo, esta solução pode não ser a ótima global (pode ser um ótimo local).
No caso estudado, a aplicação do algoritmo BFO apresentou resultados satisfatórios, pois os valores obtidos para os parâmetros dos controladores são compatíveis com os encontrados na literatura (notadamente, os resultados apresentados na referência [13]).
AGRADECIMENTOS
Solteira – UNESP e a Universidade Tecnológica Federal do Paraná – UTFPR.
REFERÊNCIAS
[1] P. Kundur et al., “Definition and classification of power system stability”. IEEE transactions on power systems, vol. 19, n. 2, pp. 1387 – 1401, 2004.
[2] A. L. M. Takahashi et al., “Estudo dos Efeitos da Inclusão do FACTS TCSC sobre a Estabilidade Dinâmica de Sistemas Elétricos de Potência Multimáquinas Modelados Através do Modelo de Sensibilidade de Correntes”, In: X Latin-American Congresson Electricity Generation, Transmission and Distribution: Clagtee 2013, Viñadel Mar-Chile. Book of Abstracts and Proceedings of 10th Latin American Congress on
Electricity Generation, Transmission and Distribution: CLAGTEE 2013, ID 195, pp. 1 – 9, (Cd-rom).
[3] C. R. Pádua Junior et al., “Proposta de um Modelo para Análise de Estabilidade a Pequenas Perturbações Baseado na Lei de Kirchhoff para Correntes”,Sbai/dincon 2013,Fortaleza - CE, pp. 1 – 6, 17 out.
2013.
[4] F. P. DeMello and C. Concordia, “Concepts of synchronous machine stability as affected by excitation control”, IEEE Trans. on PAS, vol. 88, n. 4, pp. 316 – 329, April 1969.
[5] N. G. Hingorani and L. Gyugyi, “Understanding FACTS: Concepts and Technology of Flexible AC Transmission Systems”, IEEE press, New York, 129p, 2000.
[6] A.D. Del Rosso, C.A. Canizares and V.M. Dona, “A study of TCSC controller design for power stability improvement”, IEEE Trans. on Power Systems, vol, 18, n. 4, pp. 1487 – 1496, Nov. 2003.
[7] Y. Malachi and S. Singer, “A genetic algorithm for the corrective control of voltage and reactive power”, Power Systems, IEEE Transactions on, vol. 21, n. 1, pp. 295 – 300, Feb. 2006.
[8] Z. Wang, et al., “Robust PSS design under multioperating conditions using canonical particle swarm optimization”,in Power Engineering Society General Meeting, 2007. IEEE, pp. 1 – 7, June 2007.
[9] H. Mori and Y. Goto, “A parallel tabu search based method for determining optimal allocation of facts in power systems”, in Power System Technology, 2000. Proceedings PowerCon 2000. International Conference on, vol. 2, pp. 1077 – 1082, 2000.
[10] E. Miotto, L. and M. Covacic, “Study of Stability Dynamic in a Multimachine Power System Using Robust Controllers PSS and POD”,
Power and Energy Engineering Conference, pp. 1 – 5, march 2011.
[11] K. M. Passino, “Distributed optimization and control using only a germ of intelligence”, in Intelligent Control, 2000. Proceedings of the 2000 IEEE International Symposium on, pp. P5 – 13, 2000.
[12] ——, “Biomimicry of bacterial foraging for distributed optimization and control”, IEEE Control Systems, vol. 22, n. 3, pp. 52 – 67, Jun
2002.
[13] M. M. Menezes, M., P. B. Araujo and E. V. Fortes, “Bacterial Foraging Optimization algorithm used to adjust the parameters of Power System Stabilizers and Thyristor Controlled Series Capacitor-Power Oscillation Damping controller”, INDUSCON 2014,Juiz de Fora - MG, pp. 1 – 6,
08 dez. 2014.
[14] R. Jabr, et al., “Robust and coordinated tuning of power system stabilizer gains using sequential linear programming”, Generation, Transmission and Distribution, vol. 4, n. 8, pp. 893 – 904, 2010.
[15] E. Ali and S. Abd-Elazim, “TCSC damping controller design based on bacteria foraging optimization algorithm for a multimachine power system”, International Journal of Electrical Power & Energy Systems, vol. 37, n. 1, pp. 23 – 30, 2012.
[16] P. Kundur, Power system stability and control. EUA: McGraw-Hill, 1167p, 1994.
[17] R. F. Moura, M. A. Furini, and P. B. Araujo, “Study of the limitations imposed by the zeros of the oltf of supplementary controllers on the damping of eletromechanic oscillations”,Sba: Controle & Automação,
vol. 23, pp. 190 – 201, 2012.
[18] F. Milano. Power system modelling and scripting. London: Springer, pp. 558, 2010.