J. Braz. Comp. Soc. vol.15 número3
Texto
Imagem


Documentos relacionados
Se a aceitação e incorporação dos contributos da Arqueologia Feminista e de Género em relação às remotas sociedades do Passado tem sido difícil (cf. Montón-Subías
Already the frame of the short „Interview‟ scene introduced in the beginning (Figure 1 and 2) revealed the pose of personal commitment. It was validated and substantiated
Para determinar as empresas match, numa primeira fase foram retiradas todas as empresas que não pertenciam à mesma indústria; numa segunda fase, foram identificadas todas as
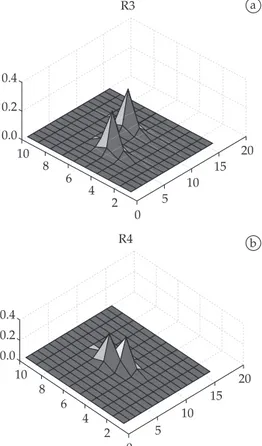
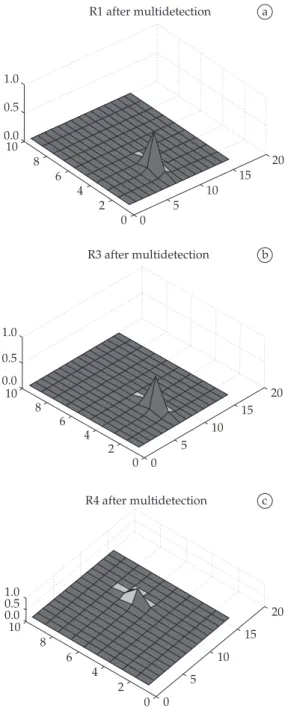
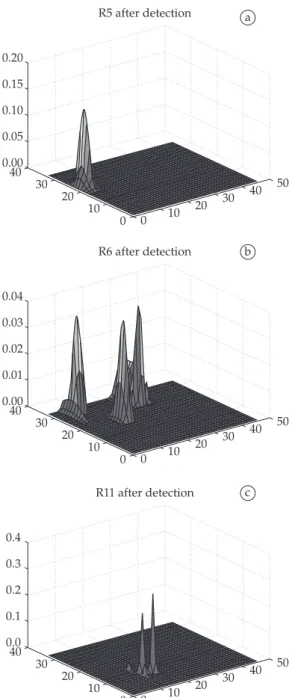
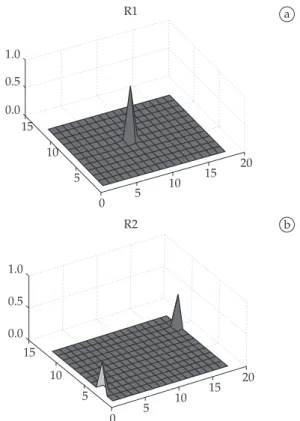
In our approach, while a high-resolution discretisation is used for the a priori definition of the compulsory flow for a task environment, a low-resolution discretisation is used in
In this work we presented a study concerning the modeling and formation control of a robotic system composed by two mobile robots, the leader robot and the follower robot.. It
The pyrolysis and atomization temperature curves for slurries of the three certified materials are shown, respectively, in Figure 1 (marine sediment), in Figure 2 (river sediment)
Partindo desse ponto, Achille Mbembe, no livro intitulado Necropolítica, trata de uma questão funda- mental: o modo como o poder estatal pode produzir, gerenciar e tornar aceitável
A ausência de um amplo consenso nas ciências sociais torna o significado dos textos clássicos balizado pelos interesses contemporâneos, para além de uma
