WELLINGTON LUZIANO PAULO JÚNIOR
MODELAGEM E AVALIAÇÃO NUMÉRICA DE
ABSORVEDORES DINÂMICOS DE VIBRAÇÕES
SINTONIZÁVEIS BASEADOS EM LIGAS COM
MEMÓRIA DE FORMA
UNIVERSIDADE FEDERAL DE UBERLÂNDIA
FACULDADE DE ENGENHARIA MECÂNICA
WELLINGTON LUZIANO PAULO JÚNIOR
MODELAGEM E AVALIAÇÃO NUMÉRICA DE ABSORVEDORES
DINÂMICOS DE VIBRAÇÕES SINTONIZÁVEIS BASEADOS EM
LIGAS COM MEMÓRIA DE FORMA
Dissertação apresentada ao Programa de
Pós-graduação em Engenharia Mecânica da Universidade Federal de Uberlândia, como parte dos requisitos para a obtenção do título
de MESTRE EM ENGENHARIA MECÂNICA.
Área de Concentração: Mecânica dos Sólidos e Vibrações.
Orientador: Prof. Dr. Domingos Alves Rade.
v
vii
AGRADECIMENTOS
Primeiramente à Deus, pela vida, pelas oportunidades à mim dadas, por ter iluminado meu caminho sempre e pelas pessoas que Ele colocou em minha vida .
Aos meus pais Wellington e Silvana e aos meus avós por terem me apoiado em todas as escolhas que eu fiz. Por terem sido o exemplo de honestidade e integridade e juntamente com minhas irmãs Stephanie e Geovanna terem me dado o incentivo para que eu continu-asse estudando.
Ao meu bem, a minha noiva Samira, por ter me dado carinho, amor e compreensão desde que eu a conheci. Sem ela esses últimos 6 anos não teriam a mesma graça.
À todos os amigos que eu fiz durante a graduação e dentro do LMEst. Durante os anos que eu estive lá essas pessoas tornaram tudo mais fácil, seja com momentos de des-contração, seja com as contribuições que estes fizeram à este trabalho. Não citarei nomes, pois foram muitos os que passaram por lá que se tornaram grandes amigos.
Ao meu orientador, Domingos Alves Rade pela amizade, pelos conselhos e orientação durante todos esses anos de convivência.
Ao Programa de Pós-graduação em Engenharia Mecânica da Universidade Federal de Uberlândia pela oportunidade concedida para realização do curso.
ix
PAULO JÚNIOR, W. L. Modelagem e Avaliação Numérica de Absorvedores Dinâmicos
de Vibrações Sintonizáveis Baseados em Ligas com Memória de Forma. 2012. 96f.
Dissertação de Mestrado, Universidade Federal de Uberlândia, Uberlândia, MG.
RESUMO
Palavras Chave: Ligas com memória de forma; Absorvedores dinâmicos de vibrações;
materiais inteligentes; controle de vibrações.
No contexto dos chamados materiais inteligentes, as ligas com memória de forma (Shape Memory Alloys – SMA) vêm sendo intensivamente investigadas com vistas D aplicações em diversos tipos de sistemas de engenharia e em problemas interdisciplinares. Especificamente, as SMA têm sido utilizadas para a mitigação de vibrações mecânicas, graças ao chamado efeito pseudoelástico, responsável pela ocorrência de histerese. Outra característica relevante desses materiais é a coexistência de duas fases cristalográficas (martensita e austenita), com propriedades mecânicas distintas, cujas frações relativas dependem da temperatura e da tensão. No presente trabalho, esta última característica é explorada em associação com uma estratégia de controle passivo de vibrações, baseada nos chamados absorvedores dinâmicos de vibrações sintonizáveis (ADV), que são dispositivos conectados à estrutura vibratória, cuja rigidez e/ou inércia podem ser ajustados em conformidade com a frequência de excitação, de modo que a vibração da estrutura seja altenuada. Especificamente, explora-se a possibilidade de confecção de ADVs sintonizáveis cuja rigidez pode ser ajustada por meio de variações controladas da fração relativa martensita/austenita induzidas por alterações da temperatura. Por meio de simulações numéricas, evidencia-se a possibilidade de sintonizar um ADV aplicado a um sistema vibratório de um grau de liberdade, dentro de uma dada faixa de valores de frequência utilizando dXDV configurações do elemento resiliente (barra e mola helicoidal de SMA), e quantificam-se as reduções de amplitudes obtidas. 2VUHVXOWDGRVGDVVLPXODo}HVFRQILUPDP
xi
PAULO JÚNIOR, W. L. Numerical Modelling and Assessment of Tunable Dynamic
Vibration Absorbers Based on Shape Memory Alloys. 2012. 96f. M.Sc. Dissertation,
Universidade Federal de Uberlândia, Uberlândia, MG, Brazil.
ABSTRACT
Keywords: Shape Memory Alloys; Dynamic Vibration Absorbers; Smart Materials; Vibration
Control.
In the context of the so-called smart materials, shape memory alloys (SMA) have been extensively investigated aiming at various applications in different types of engineering prob- lems as well as interdisciplinary problems. Specifically, SMAs have been used for the mitiga- tion of mechanical vibrations, owing to their characteristic pseudoelastic effect, which is re- sponsible for the occurrence of hysteresis. Another relevant feature of these materials is the coexistence of two crystallographic phases (martensite and austenite), which have dissimilar mechanical properties, whose relative fractions depend on temperature and stress. In the present dissertation, this latter feature is explored in association with a strategy of passive vibration control which is based on tunable dynamic vibration absorbers (TDVA). These de- vices, once connected to a vibrating structure, can have their inertia and/or stiffness and/or damping adjusted to match the excitation frequency. Specifically, such tuning is achieved by controlling the martensite/austenite fraction by applying convenient thermal loads. By means of numerical simulations, which include the integration of the equations of motion, it is put in evidence the possibility of tuning a TDVA applied to a single degree-of-freedom system, with- in a given frequency band using WZR configurations of the resilient element (SMA rod and helicoidal spring). The results enable to evaluate the levels of vibration mitigation achievedDQGFRQILUPWKDWWKH
xiii
LISTA DE FIGURAS
Figuras Páginas
Figura 1.1 - Representação de alguns domínios físicos e o acoplamento entre eles. ... 1 Figura 1.2 - Intervalos de tensão e deformação utilizáveis para atuadores de diferentes materiais inteligentes (LAGOUDAS, 2008). ... 2 Figura 1.3 - Comparação das frequências de atuação e de densidades específicas de
energia de atuação entre diversos materiais inteligentes (LAGOUDAS, 2008). ... 3 Figura 1.4 - Foto do protótipo de um absorvedor dinâmico de vibrações adaptativo
(RUSTIGHI; BRENNAN; MACE, 2003). ... 4 Figura 1.5 - Viga flexível controlada por atuadores SMA (SUZUKI; KAGAWA, 2010). ... 4 Figura 2.1 - Gráfico representando o efeito memória de forma de uma liga de NiTi (adaptado de Lagoudas (2008)). ... 10 Figura 2.2 - Gráfico representando o efeito memória de forma de uma liga de NiTi (adaptado de Lagoudas (2008)). ... 11 Figura 2.3 - Curvas tensão-deformação representando o efeito pseudoelástico (adaptado de Lagoudas (2008)). ... 12 Figura 2.4 - Diagrama tensão-deformação para um SMA em “minor looping” (adaptado de Lagoudas; Mayes; Khan (2001)). ... 12 Figura 2.5 - Exemplo de um fio de NiTi com Af = 65ºC testado a uma temperatura de 70ºC em que a histerese estabiliza após 20 ciclos (adaptado de Lagoudas (2008)). ... 13 Figura 2.6 - Diagrama tensão-deformação para uma SMA em condições isotérmicas
Figura 2.10 - Representação do efeito da adição de um ADV não amortecido em um sistema de um grau de liberdade com razão de massas M2 M10, 2. (adaptado de Cunha Jr
(1999)). ... 23 Figura 2.11 - Modelo de sistema primário com ADV amortecido acoplado (adaptado de de Silva (2007)). ... 24 Figura 2.12 - Representação do efeito da adição de um ADV amortecido em um sistema de um grau de liberdade com razão de massas M2 M10, 2 e diferentes fatores de
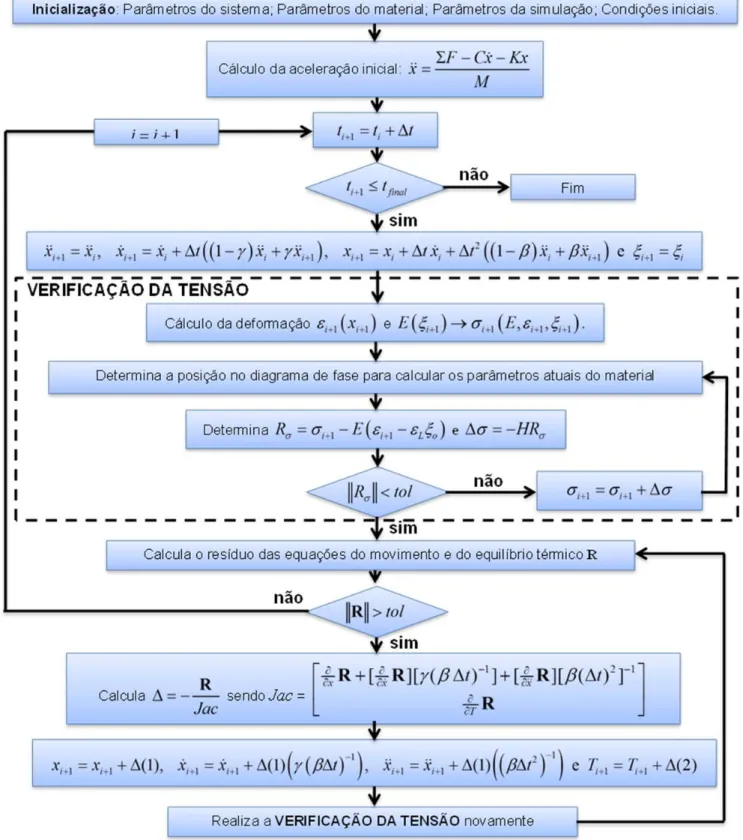
amortecimento (adaptado de Cunha Jr (1999)). ... 25 Figura 3.1 - Sistema de um grau de liberdade com ADV contendo uma barra de SMA. ... 27 Figura 3.2 - Sistema de um grau de liberdade com ADV baseado em uma mola helicoidal de SMA. ... 32 Figura 3.3 - Distribuição da tensão de cisalhamento ao longo da seção transversal do fio de uma mola linear (AGUIAR, 2011). ... 33 Figura 3.4 - Distribuição uniforme da transformação de fase (a) e da tensão de cisalhamento (b) (AGUIAR, 2011). ... 34 Figura 3.5 – Fluxograma do procedimento de resolução numérica das equações do
movimento e equilíbrio térmico. ... 36 Figura 4.1 - Sistema de um grau de liberdade contendo barra de SMA. ... 38 Figura 4.2 - Respostas em deslocamento do sistema estudado para diferentes frações martensíticas. ... 40 Figura 4.3 - Variação das frações martensíticas com o tempo para as diferentes situações estudadas. ... 41 Figura 4.4 - Processo de aquecimento do material para manutenção da fração martensítica.42 Figura 4.5 - Comparação entre os deslocamentos obtidos para 0,9 e diferentes
processos de aquecimento do material. ... 42 Figura 4.6 - Exemplo de carregamento termomecânico com variação térmica harmônica. .. 43 Figura 4.7 - Funções de variação térmica linear e harmônica ... 44 Figura 4.8 - Comparação entre as respostas temporais do sistema utilizando carregamentos térmicos variando de forma linear e harmônica. ... 45 Figura 4.9 - Frações martensíticas do material aquecido utilizando função linear e
xv
Figura 4.10 - Respostas temporais do sistema para diferentes taxas de aquecimento. ... 47 Figura 4.11 - Evolução da fração martensítica para diferentes taxas de aquecimento. ... 47 Figura 4.12 - Transformação de fase induzida pela temperatura. ... 49 Figura 4.13 - Comparação entre os deslocamentos obtidos sem e com a presença do ADV sintonizado. ... 49 Figura 4.14 - Deslocamentos do sistema primário para diferentes frações martensíticas do ADV. ... 50 Figura 4.15 - Comparação entre os deslocamentos obtidos sem e com a presença do ADV dessintonizado ( 1 ). ... 51 Figura 4.16 - Deslocamentos do sistema primário para baixas variações de fração
martensítica do ADV. ... 51 Figura 4.17 - Deslocamentos do sistema primário e do ADV com aquecimento do material com memória de forma. ... 52 Figura 4.18 - Deslocamentos do sistema primário considerando diferentes taxas de
aquecimento do material. ... 53 Figura 4.19 - Evolução da fração martensítica considerando diferentes taxas de
aquecimento do material. ... 54 Figura 4.20 - Comparação entre os deslocamentos obtidos sem e com a presença do ADV de mola SMA sintonizado. ... 56 Figura 4.21 - Deslocamentos do sistema primário para diferentes frações martensíticas do ADV de mola helicoidal. ... 57 Figura 4.22 - Deslocamentos do sistema primário sem e com o ADV incluindo aquecimento da mola SMA. ... 58 Figura 4.23 - Evolução da fração martensítica da mola SMA incluindo aquecimento. ... 58 Figura 4.24 - Deslocamentos do sistema primário sem e com o ADV incluindo aquecimento da mola SMA para uma força de excitação dez vezes maior. ... 59 Figura 4.25 – Evolução da fração martensítica da mola SMA incluindo aquecimento para força dez vezes maior. ... 60 Figura 4.26 - Deslocamentos do sistema primário considerando diferentes taxas de
Figura 4.27 - Evolução da fração martensítica considerando diferentes taxas de
xvii
LISTA DE TABELAS
Tabela 2.1 - Pontos de entrada, saída e direções normais para cada região de
transformação. ... 19
Tabela 4.1 - Parâmetros do sistema vibratório de 1 gdl e do SMA. ... 39
Tabela 4.2 - Parâmetros do sistema vibratório de 2 gdl e do SMA. ... 48
xix
LISTA DE SÍMBOLOS E ABREVIATURAS
Letras Latinas:
[ ]
A
: Região onde ocorre a transformação de martensita para austenita.ADV : Absorvedor dinâmico de vibrações.
f
A
: Temperatura final de formação de austenita.s
A
: Temperatura de início de formação de austenita.sma
A : Área do SMA.
C : Índice de mola.
2
c
: Amortecimento do ADV.A
C
: Coeficiente de influência de tensão para fase austenita.c
c
: Amortecimento crítico.d
C
: Inclinação da região de transformação de martensita maclada em orientada.M
C
: Coeficiente de influência de tensão para fase martensita.sma
c : Calor específico do SMA.
d : Diâmetro do fio.
D : Diâmetro médio de espira.
A
E
: Módulo de elasticidade da austenita pura.M
E
: Módulo de elasticidade da martensita pura.
F t
: Força de excitação.0
F
: Amplitude da força de excitação.[ ]i
f : Função da i-ésima transformação.
T
f : Função de carregamento térmico.
FRF : Função de resposta em frequência.
g
: Razão das frequências forçadas.G : Módulo de cisalhamento.
I : Corrente elétrica.
1
k
: Rigidez da estrutura primária.2
k
: Rigidez do ADV.s
K : Fator de correção de tensão de cisalhamento.
sma
k
: Rigidez do SMA.sma
L : Comprimento da barra de SMA.
[ ]
M
: Região onde ocorre a transformação de martensita maclada e/ou austenita para
martensita orientada.
1
M
: Massa da estrutura primária.2
M
: Massa do ADV.f
M
: Temperatura final de formação de martensita.s
M
: Temperatura de início de formação de martensita.ni : Vetor que caracteriza a i-ésima transformação.
[ ]
o
: Região onde ocorre a transformação de martensita maclada em orientada.[ , ]
o t
: Região de overlapping.xxi
P : Potência elétrica dissipada.
R : Resistência elétrica do material.
S : Entropia do material.
SMA : Shape Memory Alloys (Ligas com memória de forma).
[ ]
t
: Região onde ocorre a transformação de austenita para martensita maclada.T : Temperatura.
0
T
: Temperatura de referência.u : Deslocamento longitudinal da mola.
U
: Energia interna do material.1
x
: Deslocamento da estrutura primária.1
X
: Amplitude de resposta da estrutura primária.1
x : Velocidade da estrutura primária.
1
x : Aceleração da estrutura primária.
2
x
: Deslocamento do ADV.2
X
: Amplitude de resposta do ADV.2
x : Velocidade do ADV.
2
x : Aceleração do ADV.
[ ]i
Z : Razão de distância da zona i com relação ao último ponto de transição.
Letras Gregas:
: Taxa de aquecimento.
sma : Coeficiente de expansão térmica do SMA.
L : Deformação residual máxima. : Energia livre de Helmholtz.
: Ângulo de distorção.
L : Ângulo de distorção residual máximo do material.
: Fator de amortecimento.
: Razão das massas. : Coeficiente de Poisson.
i: Distância do ponto atual ao ponto de entrada da zona de transformação i.
0i
: Comprimento da zona de transformação.
ij : Distância entre o último ponto de transição de transformação à fronteira.
: Tensão.
Af : Tensão de final de formação da austenita.
As : Tensão de início de formação da austenita.
f : Tensão crítica final de alinhamento das variantes martensíticas.
Mf : Tensão final de formação da martensita.
Ms : Tensão de início de formação da martensita.
s : Tensão de início de alinhamento das variantes martensíticas. : Tensão de cisalhamento.
: Direção tangente ao caminho do carregamento. : Frequência de excitação.
a : Frequência natural do ADV.
n : Frequência natural do sistema primário.xxiii
o : Parcela da fração martensítica orientada.xxv
SUMÁRIO
AGRADECIMENTOS ... VII
RESUMO... ... IX
ABSTRACT... ... XI
LISTA DE FIGURAS ... XIII
LISTA DE TABELAS ... XVII
LISTA DE SÍMBOLOS E ABREVIATURAS ... XIX
SUMÁRIO... ... XXV
C A P Í T U L O I - INTRODUÇÃO ... 1
1.1 Materiais Inteligentes ... 1
1.2 Materiais com Memória de Forma ... 3
1.3 Absorvedores Dinâmicos de Vibrações ... 4
1.4 Contextualização e Objetivos do Trabalho ... 6
1.5 Organização da Dissertação ... 6
C A P Í T U L O I I - FUNDAMENTOS TEÓRICOS ... 9
2.1 Fenomenologia dos Materiais com Memória de Forma ... 9
2.2 Modelagem Constitutiva dos Materiais com Memória de Forma ... 13
C A P Í T U L O I I I - ABSORVEDORES DINÂMICOS DE VIBRAÇÕES BASEADOS EM MATERIAIS COM MEMÓRIA DE FORMA ... 27
3.1 Modelagem de Absorvedores Dinâmicos de Vibrações Utilizando Elemento
de Barra ... 27
3.2 Modelagem de Absorvedores Dinâmicos de Vibrações Utilizando Molas
Helicoidais ... 31
3.3 Resolução numérica das equações do movimento ... 35
C A P Í T U L O I V - SIMULAÇÕES NUMÉRICAS ... 37
4.1 Sistema de um grau de liberdade contendo barra de SMA ... 37
4.2 Sistema de dois graus de liberdade contendo barra de SMA ... 47
4.3 Sistema de dois graus de liberdade contendo mola helicoidal de SMA ... 54
C A P Í T U L O V - CONCLUSÕES E PERSPECTIVAS FUTURAS ... 63
C A P Í T U L O V I - REFERÊNCIAS BIBLIOGRÁFICAS ... 65
A N E X O A . . . 69
CAPÍTULO I
Introdução
1.1 Materiais Inteligentes
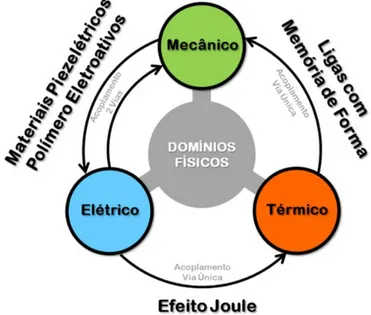
Grande esforço de pesquisa vem sendo investido nos chamados materiais inteligen-tes. Esses materiais exibem acoplamento entre diferentes domínios físicos. Esse fenômeno ocorre quando uma mudança em uma variável de estado de um domínio físico causa varia-ção em outra variável de estado de outro domínio físico, ou seja, ocorre uma conversão de energias entre os domínios físicos (LEO, 2007).
A Fig. I.1 apresenta alguns domínios físicos, suas variáveis de estado e os acoplamtos que podem ocorrer entre eles. Nela é possível verificar a existência do acoplamento en-tre os domínios mecânico e térmico nas ligas com memória de forma e o acoplamento elétri-co-mecânico nos materiais piezelétricos e polímeros eletroativos.
Grande parte dos materiais inteligentes pode também ser classificada como “ativa”. O conceito de material ativo é aplicado a materiais que exibem a capacidade de trabalhar co-mo sensor e atuador, dependendo das condições às quais o sistema é sujeito. Materiais ativos normalmente geram resposta mecânica quando sujeitos a um campo não mecânico. A amplitude dessa resposta é uma ou várias ordens de grandeza maior que o comportamen-to usual do material (LAGOUDAS, 2008).
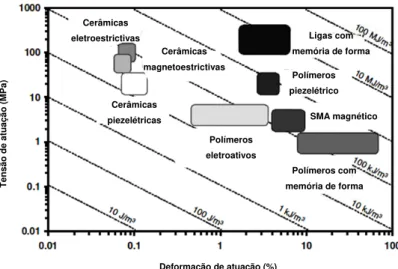
A escolha de qual material inteligente a se utilizar depende das condições às quais ele estará sujeito. A Figura I.2 mostra a faixa de utilização de diversos materiais quanto à de-formação total induzida e sua respectiva tensão de atuação, enquanto a Fig. I.3 mostra a faixa de frequência de atuação do material.
Figura I.2 - Intervalos de tensão e deformação utilizáveis para atuadores de diferentes materiais inteligentes (LAGOUDAS, 2008).
Deformação de atuação (%)
Tensão de atuaç ão ( M Pa) Cerâmicas piezelétricas Cerâmicas eletroestrictivas Cerâmicas magnetoestrictivas Polímeros eletroativos Polímeros com memória de forma
SMA magnético Polímeros piezelétrico
Ligas com memória de forma
3
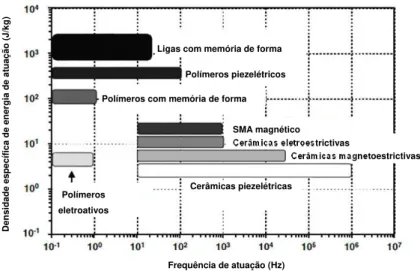
Figura I.3 - Comparação das frequências de atuação e de densidades específicas de energia de atuação entre diversos materiais inteligentes (LAGOUDAS, 2008).
Através das figuras acima se verificam as vantagens da utilização das ligas com me-mória de forma quando são necessários atuadores com alto grau de deformação e alta den-sidade específica de energia de atuação, porém esses materiais não são recomendados para aplicações onde são necessárias altas frequências de atuação; nesses casos é mais indicada a utilização de cerâmicas piezelétricas.
1.2 Materiais com Memória de Forma
Ligas com memória de forma (Shape Memory Alloys – SMA) são ligas metálicas que apresentam propriedades únicas de recuperação de grandes deformações (da ordem de 6% a 8%) sob efeito da temperatura. Assim como qualquer liga metálica, possuem diferentes fases cristalográficas que ocorrem a diferentes temperaturas. As duas fases presentes são a martensita (estável a baixas temperaturas) e a austenita (estável a altas temperaturas). Transformações de fase também podem ser induzidas pela aplicação de cargas externas, por meio de um processo não difusivo (AURICHIO; TAYLOR; LUBLINER, 1997).
A martensita pode ser encontrada na forma maclada e não maclada, sendo a primeira decorrente do resfriamento do material sem a presença de carregamento, resultando uma autoacomodação da estrutura cristalina. A martensita não maclada, por sua vez, ocorre so-mente na presença de carregamento, havendo assim, uma direção preferencial da estrutura
Frequência de atuação (Hz)
D ensidade esp ecíf ica de ene rgia d e at ua çã o ( J/kg) Polímeros eletroativos Cerâmicas piezelétricas Cerâmicas magnetoestrictivas Cerâmicas eletroestrictivas SMA magnético Polímeros com memória de forma
Polímeros piezelétricos Ligas com memória de forma
(RUSTIGHI; BRENNAN; MACE, 2003).
Figura I.5 - Viga flexível controlada por atuadores SMA (SUZUKI; KAGAWA, 2010).
1.3 Absorvedores Dinâmicos de Vibrações
O controle de vibrações é um dos campos de estudo mais importantes em engenharia, uma vez que diversos tipos de problemas ocorrem em estruturas de construção civil, equi-pamentos industriais, veículos terrestres e aéreos, decorrentes de vibrações indesejáveis.
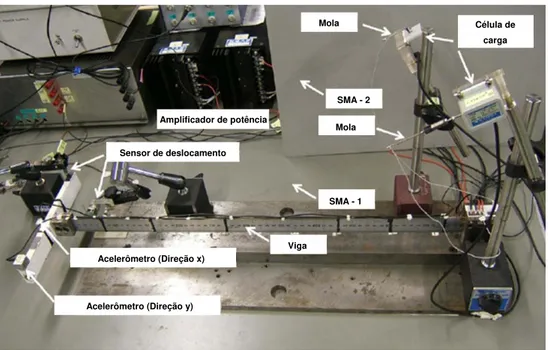
Mola
SMA - 2
Célula de carga
Mola Amplificador de potência
Sensor de deslocamento
SMA - 1
Viga Acelerômetro (Direção x)
Acelerômetro (Direção y)
cristalina. As transformações entre a martensita e a austenita produzem comportamento termomecânico representado por dois efeitos principais: efeito memória de forma e pseudoelasticidade, que serão discutidos mais adiante. Tais efeitos são explorados em diversas aplicações de Engenharia. No contexto do controle de vibrações as SMA foram empregadas em diversos trabalhos, como no absorvedor dinâmico de vibrações adaptativo desenvolvido por Rustighi BrennanH Mace (2003) apresentado na Fig. I.4 e nos sistema de controle ativo realizados por Suzuki e Kagawa (2010), ilustrado na Fig. I.5 e Baz ImamH McCoy (1990).
5
As SMAs são uma alternativa viável na confecção de ADVs adaptativos pela possibili-dade de rigidez variável através da mudança de temperatura. Diversos trabalhos focam no
Atualmente existem três FDWHJRULDV GH PpWRGRV utilizadRs para controle de vibração: métodos ativos, passivos e semi-ativos.
Os métodos de controle ativo são utilizados quando a frequência de excitação é variá-vel ou desconhecida (WILLIAMS; CHIU; BERNHARD, 2002). Normalmente é utilizado um controlador para amortecer a vibração da estrutura primária utilizando atuadores. Destacam-se o uso de diversos tipos de atuadores nesse método, como atuadores piezelétricos (LEO, 2007) e atuadores SMA (SUZUKI; KAGAWA, 2010). Esta metodologia tem como vantagem controlar uma banda larga de frequências, porém requer uma combinação complexa de sensores, atuadores e controladores, além de ter potencial de introduzir instabilidades no sistema.
Enquanto nos métodos ativos de controle de vibração é necessária uma fonte de energia externa, nos métodos passivos são utilizados dispositivos para absorver a energia vibratória sem a inserção de energia no sistema (INMAN, 2006). Dentre as estratégias de controle passivo, citam-se a utilização de materiais viscoelásticos, dispositivos elastoplásticos com capacidade de sofrer ciclo histerético (através do efeito pseudoelástico dos SMA, por exemplo), amortecedores viscosos e de atrito (MOTAHARI; GHASSEMIEH; ABOLMAALI, 2007), circuitos shunt (FLEMING; BEHRENS; MOHEIMANI, 2002) e os absorvedores dinâmicos de vibração.
Os Absorvedores Dinâmicos de Vibrações (ADVs) são classificados como dispositivos passivos de controle de vibração por não ser necessária a introdução de energia externa ou controle no sistema durante a operação. Eles são essencialmente dispositivos de parâme- tros concentrados de massa, rigidez e amortecimento que, uma vez acoplados a um sistema mecânico, são capazes de absorver a energia vibratória, reduzindo as amplitudes do movimento no ponto de conexão (CUNHA Jr., 1999). A grande dificuldade deste tipo de dispositivo ocorre quando a excitação do sistema é variável, ocorrendo assim a desintonização do ADV e a consequente perda de eficiência no controle da vibração do sistema primário.
Diferentemente de um ADV adaptativo, onde a rigidez ou a massa é alterada em tem-po real com o sistema funcionando, tem-pode-se definir o ADV sintonizável, que utiliza do mes-mo princípio de mes-modificar alguma característica do sistema, porém esta é feita de forma “off line”. Tendo em vista que a principal desvantagem de utilizar as SMAs no controle de vibra-ções está no fato que a alteração da rigidez do elemento depende do processo de transfor-mação de fase, sendo este lento, pois depende da transferência de calor por condução e convecção, a alternativa de modificar os parâmetros do sistema de forma “off line” pode ser mais eficiente em sistemas reais.
1.4 Contextualização e Objetivos do Trabalho
Desenvolvida no Laboratório de Mecânica de Estruturas Prof. J.E.T. Reis (LMEst), da Faculdade de Engenharia Mecânica da UFU, a presente dissertação tem por objetivo a mo-delagem de materiais com memória de forma para controle passivo de vibração através do desenvolvimento de um absorvedor dinâmico de vibrações sintonizável.
O estudo se insere no contexto das atividades desenvolvidas no âmbito do Instituto Nacional de Ciência e Tecnologia de Estruturas Inteligentes em Engenharia (INCT-EIE), sediado pelo LMEst, que se dedica ao estudo dos fundamentos e aplicações de materiais inteligentes em diversos tipos de problemas de engenharia e problemas multidisciplinares.
1.5 Organização da Dissertação
O trabalho está dividido em cinco capítulos, organizados da seguinte forma:
No Capítulo I são apresentados os comentários introdutórios e objetivos do trabalho. O Capítulo II é dedicado aos fundamentos teóricos acerca da fenomenologia dos SMA, desenvolvimentodeADVsadaptativosutilizandoSMAscomoelementoderigidez variável, comoWilliamsChiuHBernard(2002),WilliamsChiuHBernand(2005)Rustighi%UHQQDQ
H0DFHH6 DYL'H3DXODH/DJRXGDV
O trabalho abrange a fenomenologia dos materiais com memória de forma, assim co mo sua modelagem constitutiva baseada em um modelo GHVFULWRQDOLWHUDWXUD e a suaimplementação numérica para realização de simulações de sistemas vibratórios.
7
O Capítulo IV contempla as simulações numéricas realizadas de sistemas de um grau de liberdade contendo SMA e sistemas de um grau de liberdade com um ADV acoplado, onde este ADV tem como elemento de rigidez o material com memória de forma.
CAPÍTULO II
Fundamentos Teóricos
2.1 Fenomenologia dos Materiais com Memória de Forma
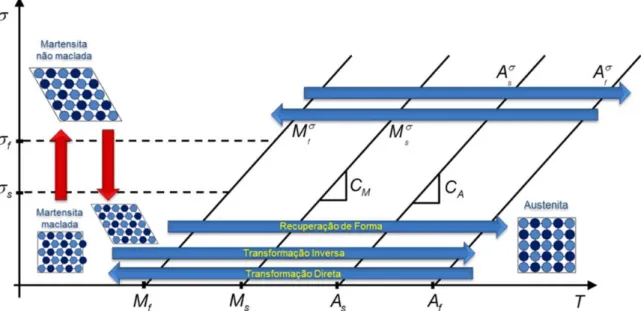
As diferentes fases presentes nos materiais com memória de forma são a razão pela qual esses materiais possuem propriedades tal como a recuperação de forma (efeito memó-ria de forma) e o efeito pseudoelástico. Em altas temperaturas a fase estável é a austenita, que, quando resfriada sem a presença de carregamento, se transforma em martensita ma-clada em um processo onde ocorre acomodação da estrutura cristalina e não há mudança visível na forma do material; esse processo é chamado de Transformação Direta (LAGOUDAS, 2008, SAADAT et al., 2002, AURICHIO; TAYLOR; LUBLINER, 1997).
Quando a martensita maclada é aquecida ela se transforma em austenita e este fenô-meno é chamado de Transformação Inversa. As duas transformações induzidas pela tempe-ratura citadas ocorrem em faixas definidas por valores característicos de cada tipo específi-co de material, a saber: a temperatura de início de formação de martensita (Ms - Martensitic
start temperature), temperatura final de formação de martensita (Mf - Martensitic finish
tem-perature), temperatura de início de formação de austenita (As - Austenitic start temperature) e temperatura final de formação de austenita (Af - Austenitic finish temperature) (LAGOUDAS, 2008).
Na presença de carregamento, é possível que o material se transforme diretamente de austenita em martensita não maclada se a tensão mecânica aplicada for superior à tensão crítica final de alinhamento das variantes martensíticas (
f), esse efeito é conhecido como pseudoelástico. A retirada do carregamento retorna o material à fase austenítica (KHAN et al., 2004).Todos os fenômenos descritos acima são representados na Fig. II.1.
Figura II.1 - Gráfico representando o efeito memória de forma de uma liga de NiTi (adaptado de Lagoudas (2008)).
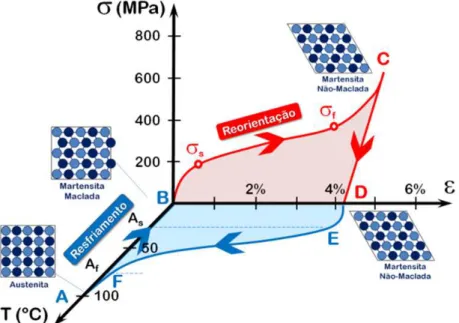
Como já foi dito anteriormente, os dois principais efeitos que as SMAs podem sofrer são o efeito memória de forma e o efeito pseudoelástico. O primeiro é ilustrado na Fig. II.2, onde é possível verificar que aplicando carregamento em uma estrutura composta de mar-tensita maclada (ponto B), o material ultrapassa as tensões de alinhamento das variantes martensíticas e se transforma em martensita não maclada (ponto C), apresentando grandes deformações macroscópicas. Verifica-se que no ponto D, quando a carga é totalmente reti-rada, existe uma deformação residual. A partir do aquecimento do material a martensita não maclada é transformada em austenita, recuperando completamente a deformação sofrida pelo material (ponto A). Quando o material é resfriado, ele retorna a sua configuração inicial (ponto B) (LAGOUDAS, 2008).
11
Figura II.2 - Gráfico representando o efeito memória de forma de uma liga de NiTi (adaptado de Lagoudas (2008)).
O efeito pseudoelástico, por sua vez, é uma transformação induzida pelo carregamen-to e posterior descarregamencarregamen-to, gerando grande deformação e recuperação quando o mate-rial está a uma temperatura acima de Af, na qual a única fase presente no material é a aus-tenita (KHAN et al., 2004).
Na Figura II.3 verifica-se que o material ultrapassa as tensões de formação de marten-sita quando carregado (
Ms e Mf). Quando ocorre o descarregamento, o material retornapassando pelas tensões de formação de austenita (
As e Af) e recuperandoFigura II.3 - Curvas tensão-deformação representando o efeito pseudoelástico (adaptado de Lagoudas (2008)).
Outro detalhe importante são os chamados “minor loopings”, que são as curvas inter-nas vistas na Fig. II.4, que acontecem quando a transformação não é completa. Este efeito é bastante comum em sistemas dinâmicos (BO; LAGOUDAS, 1999a).
Figura II.4 - Diagrama tensão-deformação para um SMA em “minor looping” (adaptado de Lagoudas; Mayes; Khan (2001)).
13
pode modificar sua forma sem a presença de carregamento mecânico quando na presença de carregamento térmico (LAGOUDAS, 2008). Este procedimento é chamado de treinamen-to.
O treinamento é realizado em uma SMA até que a histerese observada no material se estabilize. A repetição dos carregamentos termomecânicos causa mudanças macroscópicas permanentes no material desde o primeiro ciclo; são estas mudanças que introduzem defei-tos permanentes no material e criam um estado de tensões residuais internas que facilitam a formação de variantes martensiticas preferenciais. A Fig. II.5 representa uma liga de NiTi que estabiliza após 20 ciclos (LAGOUDAS, 2008, GONZALEZ, et al., 2010).
Figura II.5 - Exemplo de um fio de NiTi com Af = 65ºC testado a uma temperatura de 70ºC em que a histerese estabiliza após 20 ciclos (adaptado de Lagoudas (2008)).
2.2 Modelagem Constitutiva dos Materiais com Memória de Forma
Existem também modelos mais simples, que são baseados nas relações tensão-deformação como o Modelo Simplificado de Lagoudas (LAGOUDAS; MAYES; KHAN, 2001), que consegue representar o comportamento das SMA acima da temperatura Af (somente o efeito pseudoelástico) utilizando poucos parâmetros e tendo baixo custo computacional.
Figura II.6 - Diagrama tensão-deformação para uma SMA em condições isotérmicas
Apesar deste modelo0 possuir vantagens como baixo custo computacional e utilização de poucos parâmetros, ele não é capaz de representar completamente todos seus efeitos de uma SMA. Por esse motivo outro modelo constitutivo foi estudado e utilizado nesta Disserta-ção, o qual é descrito a seguir.
O modelo unidimensional de Brinson (BRINSON, 1993; BEKKER; BRINSON, 1998; GAO; QIAO; BRINSON, 2007) é baseado nos trabalhos realizados por Tanaka (TANAKA, 1986) e Liang e Rogers (LIANG; ROGERS, 1990) utilizando a energia livre de Helmholtz como potencial termodinâmico para obtenção das equações constitutivas. A energia livre de Helmholtz é dada por:
U TS
(2.1)( VVHVDXWRUHV assumem que acima da temperatura Af a relação tensão-deformação pode ser representada por uma série de segmentos lineares, conforme mostrado na Fig. II.6.
15
onde U, T, S são a energia interna, a temperatura e a entropia do material respectivamente. Substituindo a energia livre de Helmholtz na inequação de Clausius-Duhem (BRINSON, 1993) e realizando algumas manipulações algébricas, é possível encontrar:
(2.2) S T (2.3)
Através da Eq. (2.2) é possível encontrar a lei constitutiva do modelo unidimensional de Brinson dada por:
E
L o T T0 (2.4)onde
é a tensão, E
é o módulo de elasticidade, é a deformação, L é adeforma-ção residual máxima , é relacionado com o coeficiente de expansão térmica ( smaE
sma é o coeficiente de expansão térmica do material e E é módulo de elasticidade
existe deformação devida a campo térmico.
É importante notar que este modelo diferencia as duas formas de martensita, sendo uma chamada acomodada (maclada), que é induzida pela temperatura e não apresenta de-formação macroscópica, e uma chamada orientada (não maclada), que é induzida pelo car-regamento e possui estrutura cristalográfica orientada em uma direção preferencial. A fração
t é a parcela acomodada da fração martensítica e
t o (2.5)
M
1
AE E E (2.6)
, onde
deste, conforme Gao; Qiao; Brinson (2007)) e T0 é a temperatura de referência na qual não
martensítica total é a soma dessas duas parcelas conforme Eq. (2.5), onde
o é a parcela orientadaRXVHMD
onde EA e EM são os módulos de elasticidade da austenita e martensita puras, respectiva-mente. A componente associada à expansão térmica é desconsiderada da Eq. (2.4), pois esta é desprezível quando comparada com a deformação decorrente de transformações de fase; assim, a lei constitutiva é reescrita conforme abaixo:
E
M
1
E
A
L o (2.7)O diagrama de fase que descreve o comportamento da SMA e suas transformações de fase de acordo com o modelo de Brinson é dado pela Fig. II.7.
Figura II.7 - Diagrama de fase para SMAs (adaptado de Gao; Qiao; Brinson (2007)).
17
existe a região chamada de “overlapping” onde podem ocorrer as transformações que ocor-rem em [o] e [t]. Esta região é representada por [o,t].
Nas regiões de transformação, a fração martensítica só é alterada se o caminho asso-ciado ao carregamento termomecânico possuir uma componente positiva na direção do ve-tor que caracteriza determinada transformação; este último é representado por ni, ou seja, a transformação só ocorre se a condição da Eq. (2.8) for satisfeita.
ni 0 i M , A , o ,t (2.8)
onde é a direção tangente ao caminho do carregamento. Outro aspecto importante deste modelo são os chamados pontos de transição, ou “switching points”, que são pontos onde a transformação é interrompida e reiniciada dentro das regiões de transformação; os pontos nas fronteiras da região de transformação, sejam eles de entrada ou de saída, também são considerados pontos de transição. Na formulação matemática somente os últimos pontos de transição são computados, esse procedimento possibilita uma melhoria no desempenho do código computacional associado ao modelo (GAO; QIAO; BRINSON, 2007).
A evolução da fração martensítica nas transformações direta e inversa pode ser escri-ta segundo as seguintes equações:
A
A jf Z (2.9)
1
M
Mj j f Z
(2.10)
onde o subscrito j representa o último ponto de transição e f[A] e f[M] são as funções de trans-formação que variam de zero a um. Diversas funções são utilizadas pelos diferentes mode-los constitutivos existentes; o modelo considerado utiliza a função cosseno devido a sua simplicidade de integração e diferenciação. Assim, as funções de transformação são dadas pelas equações abaixo:
1
1 1 cos 2
A i i
f Z Z (2.11)
1
1 cos 2M i i
onde Zi é a razão de distância na zona i com relação ao último ponto de transição j. Zi varia de 0 a 1 de acordo com:
0
, , , ou
i i
j i
i i
j
Z T i M A o t
(2.13)
onde
i é a distância do ponto atual ao ponto de entrada na fronteira da zona detransfor-mação i, i j
é o comprimento da zona de transformação. A Figura II.8 apresenta essesFigura II.8 – Zona de transformação [M] (adaptado de Gao; Qiao e Brinson (2007)).
As distâncias
i, i j e
0i podem ser calculadas a partir de: é a distância entre o último ponto de transição de transformação à fronteira; e
por último 0i
19
n n n n n n1 in 2 in 1 in 2 in 0 1 out in 2 out in
i i i i i
i i i i i
j j j
i i i i i i i
T T T T T T (2.14)
onde
n n1i, 2i
são as componentes do vetor ni ,
Tini,
ini
é o ponto de entrada na zona detransformação i,
outi , outi
T
é o ponto de saída da zona de transformação e
i, i
j jT
é oúlti-mo ponto de transição de transformação computado. Os valores de cada uma dessas variá-veis podem ser calculados através da Tab. II.1.
Tabela II.1 - Pontos de entrada, saída e direções normais para cada região de transformação.
Região
in, in
i i
T
n n1i, 2i
out, out
i i
T
[A]
,0
s A 2 2 1 , 1 1 A A A C C C
Af,0
[t]
,0
s
M 1,0
Mf,0
[M]
,
s s M
2 2 1 , 1 1 M M M C C C
Ms,
f
[o]
,
s s M
2 2 1 , 1 1 d d d C C C
Ms,
f
O coeficiente Cd que indica a inclinação da região de transformação [o] foi considerado igual à zero neste trabalho; desta forma esta região do gráfico permanece na horizontal, sem inclinação.
A partir das equações apresentadas é possível obter as seguintes expressões para as frações de martensita acomodada e orientada para cada uma das regiões de transformação, onde o índice “swi” indica que o valor desta variável se refere ao do último ponto de transi-ção:
1 1
cos 2 2
A swi A
t t Z
(2.15)
1 1
cos 2 2
A swi A
o o Z
1 1
1 1 cos
2 2
t swi swi swi t
t o o t Z
(2.17)
t swi o o
(2.18) 1 1
cos 2 2
M swi M
t t Z
(2.19)
1 1
1 cos
2 2
M swi swi M
o o o Z
(2.20)
1 1
cos 2 2
o swi o
t t Z
(2.21)
1 1
1 cos
2 2
o swi swi o
o o o Z
(2.22)
Para que ocorra transformação na região de “overlapping” é necessário que o vetor tangente ao caminho descrito pelo carregamento termomecânico apresente componentes positivas em ambas as direções de transformação [o] e [t]. Nesse caso, a evolução das fra-ções martensíticas maclada e não maclada são dadas por:
,
1 1
1 1
1 1 cos cos
2 2 2 2
o t swi swi swi t o
t o o t Z Z
(2.23)
, 1 1
1 1 cos
2 2
o t swi swi o
o o o Z (2.24)
2.3 Modelagem e Sintonização de ADVs
21
Figura II.9 - Modelo de sistema primário com ADV acoplado não amortecido (adaptado de de Silva (2007)).
Admitindo que a força de excitação aplicada ao sistema primário seja de natureza harmônica de amplitude F0 e frequência de excitação , que não necessariamente coincide
com a frequência natural deste sistema, expressa segundo:
0i t
F t F e
, (2.25)
as equações do movimento no domínio da frequência para o sistema estudado são dadas por:
2
1 1 1 2 2 2 0
X M k k k X F (2.26)
F t é a força de excitação considerada aplicada
no sistema primário.
2
2 2 2 2 1
M k X k X
(2.27)
onde X1 e X2 são as amplitudes de vibração harmônica das massas M1 e M2,
respectivamen-te.
Verifica-se, a partir da Eq. (2.27), que se 2
2 / 2 k M
então X10, ou seja, se o ab-sorvedor está sintonizado de forma que sua frequência natural seja igual à frequência de excitação, então o sistema primário não se movimentará. Também é possível verificar a par-tir da Eq. (2.26), que substituindo o valor X10, então, F0 k X2 2, ou seja, o absorvedor
verificar que a função de resposta em frequência (FRF) referente à massa M1 é dada por:
2 1 2 2 11 4 2
0 1 1 2 2 1 2 1 2 1 2
k k M
X G
F k M M k M M k M k k (2.28)
Introduzindo as notações de frequência natural do sistema primário e do absorvedor considerados isoladamente, dadas respectivamente por:
1 1
n
k M
(2.29)
2 2
a
k M
(2.30)
a partir das expressões acima é possível reescrever (2.28) sob a forma:
2 11 2 2
0 1 2 2 1 1 1 1 1 a n a X G
F k k k
k k
(2.31)
Verifica-se na equação acima que a amplitude X1 é nula quando o numerador da equação é zero. A Fig. II.10 representa esse fenômeno. Verifica-se também a presença de exerce sobre o sistema primário uma força de mola igual e oposta à força de excitação.
23
duas novas frequências naturais, pois quando o ADV é acoplado ao sistema primário de um grau de liberdade, passa-se a ter um sistema de dois graus de liberdade.
Figura II.10 - Representação do efeito da adição de um ADV não amortecido em um sistema de um grau de liberdade com razão de massas M2 M10, 2. (adaptado de Cunha Jr
(1999)).
Considera-se na Figura II.10 o caso mais crítico, quando a frequência de excitação é igual à frequência natural do sistema primário; por este motivo, o pico de vibração da massa
1
M sem a presença de ADV ocorre na frequência natural do absorvedor; tal pico é comple-tamente atenuado com a presença do ADV.
Conclui-se, então, que para atenuar vibrações de um sistema de um grau de liberdade deve-se acoplar a esse sistema primário um ADV com parâmetros escolhidos
k M2, 2
que satisfaçam a relação 22 2 k M
. Porém, apesar dos ADVs não amortecidos serem muito
eficientes quando a frequência de excitação for constante, esta hipótese dificilmente se veri-fica na prática (CUNHA JU, 1999; HARTOG, 1956).
Figura II.11 - Modelo de sistema primário com ADV amortecido acoplado (adaptado de de Silva (2007)).
Para o sistema da Fig. II.11 as equações do movimento no domínio da frequência são dadas por:
2
1 1 1 2 2 2 2 2 0
X M k k j c X k j c F (2.32)
2
2 2 2 2 1 2 2
M k j c X X k j c (2.33)
1 2 2 2 1
1 4 2
0 1 1 2 2 2 1 2 1 2 1 2 2
k k j c M
X G
F k M M k j c M M k M k k j c (2.34)
Por conveniência, definem-se os seguintes termos adimensionais:
M2 M1 (2.35)
A partir das Eqs. (2.32) e (2.33) é possível realizar algumas manipulações algébricas e
25
a n
f (2.36)
n
g (2.37)
c cc (2.38)
2 2
c n
c M (2.39)
onde é a razão das massas, f é a razão das frequências naturais, g é a razão das fre-quências forçadas, é o fator de amortecimento e cc é o amortecimento crítico.
Figura II.12 - Representação do efeito da adição de um ADV amortecido em um sistema de um grau de liberdade com razão de massas M2 M10, 2 e diferentes fatores de
amortecimento (adaptado de Cunha Jr (1999)).
vado na Fig. II.10. Já para valores muito altos de amortecimento, as duas massas são virtu-almente ligadas entre si, ou seja, o sistema de dois graus de liberdade se comporta como se tivesse apenas um grau de liberdade e uma massa M1M2 com deslocamento infinito na ressonância.
Para valores intermediários de fator de amortecimento as FRFs se assemelham ora àquelas de um sistema de um grau de liberdade amortecido, ora àquelas de um sistema de dois graus de liberdade amortecido.
No próximo capítulo será discutida a modelagem de absorvedores dinâmicos de vibra-ção utilizando as propriedades dos materiais com memória de forma. A abordagem consisti-rá em substituir a mola do ADV por um elemento constituído de material com memória de forma, com o objetivo de promover sintonização do dispositivo de controle à frequência de excitação.
CAPÍTULO III
Absorvedores Dinâmicos de Vibrações Baseados em Materiais com Memória
de Forma
3.1 Modelagem de Absorvedores Dinâmicos de Vibrações Utilizando Elemento de Barra
Figura III.1 - Sistema de um grau de liberdade com ADV contendo uma barra de SMA.
Considerando a aplicação da excitação externa F(t) no sistema primário, é possível encontrar as seguintes equações do movimento do sistema:
1 1 1 1 2 2 1 2 2 2 2 1
0 0,
sma sma
M x k x c x x F F t
M x F c x x (3.1)
onde Fsma
Asma é a força oriunda dos carregamentos internos que se mostram presentesna barra de SMA, sendo Asma a área da seção transversal da barra SMA e a tensão
atu-ante nela. Ainda tem-se a equação que define o equilíbrio térmico do sistema, assumida como:
1 0,T
T
f t (3.2)
onde fT
t é uma função de carregamento térmico. O conjunto de equações não linearespode ser escrito sob a forma matricial de um resíduo da seguinte forma:
1 1 1 1 2 2 1
2 2 2 2 1 0.
1
sma sma T
M x k x c x x A F t
M x c x x A
T f t
R (3.3)
Para determinar o valor das variáveis independentes
x,T
de modo que o equilíbriodinâmico do sistema seja obedecido em um tempo t t, considera-se uma solução
apro-ximada
xt kt,Tt kt
. O sistema de equações não lineares R tk t é linearizado no entorno dareferida configuração, proporcionando o seguinte resultado:
1 0,
k k k k k k
t t t t t t t t t t t t
k k k k
t t t t t t Tt t
T
R R R x R x
x x
R x R
x
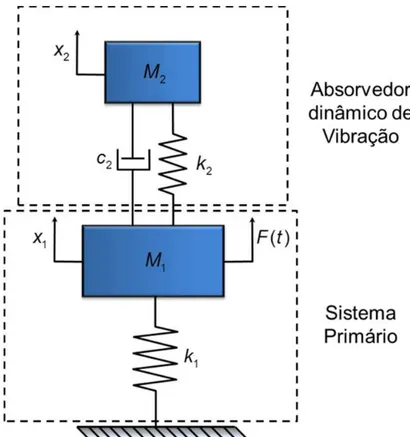
(3.4) Verifica-se na Fig. III.1 que o sistema primário é composto pela massa M1 e a
rigi-dez k1, enquanto o ADV é composto pela massa M2, o coeficiente de amortecimento c2 e a rigidez de uma barra de SMA representada porksma.
29 onde: 1 1 2 1 2 ; 0 0 sma sma sma sma
A k A
x x
A A
x x
R
x (3.5)
2 2 2 2 ;
0 0
c c
c c
R
x (3.6)
1 2 0 0 ; 0 0 M M R
x (3.7)
. 1 sma sma T A T A T T f tR (3.8)
Como mostrado por Gao; Qiao e Brinson (2007), tem-se:
, i H Ex x (3.9)
onde para as regiões [A], [t], [M] e [o], definidas no capítulo 2, tem-se:
1
1 2
1 , [ ],[ ],[ ],[ ];
i i i
H H H i A t M o (3.10)
1
1 2 1 out 2 out
1
sen , [ ],[ ],[ ],[ ];
2
i i i i i i i
j j
2 1 1s, [ ],[ ],[ ],[ ].
i i i
L o M A L
H E E C E C i A t M o (3.12)
As expressões das constantes C1i e 1i s
C , encontradas em Gao; Qiao e Brinson (2007)
[ ] [ ] 1 1 2 1 3
1 t o ;
H H H H H (3.13)
[ ] [ ]
2 1mix 1smix;
t t
L o M A L
H E E C E C (3.14)
[ ] [ ]
3 1mix 1smix,
o o
L o M A L
H E E C E C (3.15)
onde H1[ ]t e H1[ ]o podem ser obtidos através da Eq. (3.11); as expressões para as constantes
[ ] 1mix
t
C , C1mix[ ]o , [ ] 1smix
t
C e [ ]
1smix
o
C
sária à integração numérica das equações do movimento é a da tensão com relação à tem-peratura; nas regiões [A], [t], [M] e [o] esta, é dada por:
* 2 1 ,
i i i
H H H
T (3.16)
onde os valores Hi e H2i já foram definidos nas Eqs. (3.10) e (3.12). O termo
H1i * é dadopor:
1 *
1 1 1 out 1 out
1
sen , [ ],[ ],[ ],[ ].
2
i i i i i i i
j j
H n Z n T T n i A t M o (3.17)
Para a região de overlapping, a derivada da tensão com relação à temperatura é defi-nida como:
* * [ ] [ ] 2 1 3 1 ,i t i o
H H H H H
T (3.18)
e são reproduzidas no $QH[R A desta Dissertação. Na região de overlapping, as equações são definidas como:
neces-31
onde os valores de H, H2 e H3 já foram definidos nas Eqs. (3.13), (3.14) e (3.15) respecti-vamente. As expressões para
H1[ ]t * e
H1[ ]o * são dadas por:
1 *
[ ] [ ] [ ] [ ] [ ] [ ] [ ] 1 1 1 out 2 out
1
sen ;
2
t t t t t t t
j j
H n Z n T T n (3.19)
[ ] * [ ]
[ ]
[ ]
[ ]
[ ]
[ ]
11 1 1 out 2 out
1
sen .
2
o o o o o o o
j j
H n Z n T T n (3.20)
O absorvedor dinâmico de vibração em questão pode ser sintonizado a diferentes va-lores da frequência de excitação a partir da mudança de sua frequência natural, por meio da variação da rigidez do elemento com memória de forma, como pode ser visto na equação abaixo que define a frequência natural do ADV.
2 , sma a k
M (3.21)
onde a rigidez da barra de SMA é dada pela Eq. (3.22). Sendo E
o módulo deelastici-dade do elemento SMA, o qual varia com a fração martensítica, e LSMA é o comprimento da
barra SMA.
sma.
sma
SMA
E A
k
L (3.22)
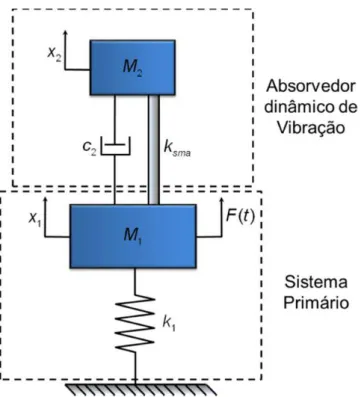
3.2 Modelagem de Absorvedores Dinâmicos de Vibrações Utilizando Molas Helicoidais
Figura III.2 - Sistema de um grau de liberdade com ADV baseado em uma mola helicoidal de SMA.
As molas são componentes mecânicos que possuem como característica principal a capacidade de apresentar grandes deslocamentos recuperáveis, além da possibilidade de controlar a aplicação de força ou torque. Essas características, quando combinadas com as das ligas com memória de forma, ampliam as possibilidades deste componente em diversas aplicações (AGUIAR, 2011).
mola helicoidal pode ser calculada conforme Shigley (2005) por:
3 ,
8
SMA s
d F
K D (3.23)
onde
é a tensão de cisalhamento, d é o diâmetro do fio, D é o diâmetro médio de espira eKs é um fator de correção de tensão de cisalhamento definido por:
2 1,
2
s
C K
C (3.24)
33
onde C é o índice de mola, que para a maioria das molas varia entre 6 e 12 (SHIGLEY. 2005) e é dado por:
D.
C
d (3.25)
Relembrando a lei constitutiva do modelo unidimensional de Brinson dada por:
E L o . (3.26)
G L o , (3.27)
onde G
é o módulo de cisalhamento dado pela Eq. (3.28), é o ângulo de distorção eL é o ângulo de distorção residual máximo do material.
, 2 1
E
G (3.28)
Figura III.3 - Distribuição da tensão de cisalhamento ao longo da seção transversal do fio de uma mola linear (AGUIAR, 2011).
podese assumir relação semelhante para o cálculo da tensão cisalhante, da seguinte forma:
onde é o coeficiente de Poisson.