UNIVERSIDADEFEDERAL DOCEARÁ
PROGRAMA DEPÓS-GRADUAÇÃO EM ENGENHARIA DETELEINFORMÁTICA
Demodulador BPSK Completamente Digital com
Portadora Suprimida para Telecomando de
Satélites
Dissertação de Mestrado
Caio Gomes de Figueredo
UNIVERSIDADEFEDERAL DOCEARÁ
PROGRAMA DEPÓS-GRADUAÇÃO EMENGENHARIA DETELEINFORMÁTICA
Demodulador BPSK Completamente Digital com
Portadora Suprimida para Telecomando de
Satélites
Autor
Caio Gomes de Figueredo
Orientador
Prof. Dr. Carlos Alexandre Rolim Fernandes
Co-orientadores
Prof. Dr. Antônio Macílio Pereira Lucena Prof. Dr. João César Moura Mota
Dissertação apresentada à Coordenação do Programa de Pós-graduação em Engenharia de Teleinformática da Universidade Federal do Ceará como parte dos requisitos para obtenção do grau deMestre em Engenharia de Teleinformática.
Dados Internacionais de Catalogação na Publicação Universidade Federal do Ceará
Biblioteca de PósGraduação em Engenharia BPGE
F495d Figueredo, Caio Gomes de.
Demodulador BPSK completamente digital com portadora suprimida para telecomando de satélites / Caio Gomes de Figueredo. – 2015.
63 f. : il. color. , enc. ; 30 cm.
Dissertação (mestrado) – Universidade Federal do Ceará, Centro de Tecnologia, Departamento de Engenharia de Teleinformática, Programa de PósGraduação em Engenharia de Teleinformática, Fortaleza, 2015.
Área de concentração: Sinais e Sistemas.
Orientação: Prof. Dr. Carlos Alexandre Rolim Fernandes. Coorientação: Prof. Dr. Antônio Marcílio Pereira Lucena. Coorientação: Prof. Dr. João César Moura Mota
.
1. Teleinformática. 2. Conversores de frequência. I. Título.
Resumo
E
conversão analógico-digital e a conversão em frequência por amostragem em bandaste trabalho apresenta um modelo de demodulador que realiza simultaneamente a passante de um sinal com modulação BPSK (Binary Phase Shift Keying) para aplicação em enlaces espaciais. O aspecto mais importante do trabalho foi o desenvolvimento de uma nova operação de interpolação para recuperação das amostras perdidas na conversão de frequência e que simplifica a implementação do demodulador. O interpolador correlaciona as amostras do sinal de forma que torna-se necessário o projeto de um filtro ótimo apropriado para processar as amostras corrompidas e mitigar os efeitos do ruído gaussiano e colorido. Os efeitos deste novo interpolador no ruído são analisados, assim como a forma em que ele afeta a performance do sistema. Após a filtragem ótima, segue a correção dos erros de sincronismo de atraso de simbolo e de fase. Para a recuperação do sincronismo de fase foi utilizado um DPLL (Digital Phase Locked Loop), uma variante digital de uma estrutura bastante conhecida e utilizada em eletrônica analógica. O DPLL é uma estrutura em malha fechada que estima e corrige os valores do desvio angular das amostras, o que corresponde ao devio provocado pela diferença de fase entre os osciladores do transmissor e do receptor. Para a recuperação do atraso de símbolo foi utilizada, para estimação do tempo de atraso, o estimador de Oerder&Meyer que é o equivalente digital da conhecida recuperação de temporização em tempo contínuo com a lei quadrática. Após a estimação ser realizada, é feita a correção deste atraso nas amostras do sinal recebido através de uma operação de interpolação, onde novos valores do sinal são calculados para os instantes de tempo corrigidos. Essa operação é realizada por um filtro interpolador, uma estrutura especial conhecida como estrutura de Farrow. O sistema proposto foi descrito matematicamente, sendo analisadas as expressões dos sinais nos diferentes estágios do conversor, bem como as estatísticas dos sinais de ruído. Apresentam-se os resultados da simulação computacional nos quais se avalia a perda no desempenho do demodulador, analisando suas causas.Abstract
T
space communications that performs simultaneously the sampling and down-conversionhis work presents a new structure for an all-digital BPSK demodulator developed for of the the intermediate frequency signal to the baseband signal. The most important aspect of this work is the design of a new interpolator to retrieve lost samples during the down conversion process, and also to simplify the demodulator implementation. This interpolator correlates the samples of the output signal in such way that it was necessary to design a optimum filter appropriate to process the samples corrupted by gaussian and colored noise. The effects of the new interpolation at the noise are analyzed as well as the way it affects the whole demodulator performance. After performing the optimum filtering, the phase and symbol offsets are estimated and corrected. For the phase, for example, it was used a DPLL (Digital Phase Locked Loop), a digital variation of the PLL, a well known structure and largely utilized in analogical electronics. The DPLL is a closed-loop structure that estimates and corrects the values for the angular which corresponds to the phase deviation caused by the offset between the transmitter and receiver oscilators. For the timing parameter estimation, it was used the Oerder&Meyer estimator that is the digital equivalent to the well known square timing recovery structure. After that, the correction is performed by an interpolation operation over the samples of the received signal, where a filter, named Farrow filter, is applied to these samples, calculating the new samples of that signal at the corrected time instants. This system is mathematically described, all the signals expressions of every stage of the demodulator are analyzed, including the noise statistics. Some computational simulation results are shown and the performance degradation is discussed.Agradecimentos
C
om grande prazer dedico esta página para expressar a minha gratidão para com todos aqueles que me acompanharam durante a minha trajetória no mestrado e também me ajudaram na realização desta dissertação.A Deus, acima de tudo, por todas as conquistas.
Aos meus pais, por terem me dado condições de estudar e crescer profissionalmente e socialmente, além do amor e apoio por toda a vida.
A minha namorada, por todo amor, carinho e apoio durante toda a jornada do mestrado.
Lista de Siglas
Siglas
A/D-BP/BB Conversor Analógico/Digital e Banda Passante/Banda Base AWGN Additive White Gaussian Noise
BER Bit Error Rate
BPSK Binary Phase Shift Keying
CCSDS Consultative Committee for Space Data Systems
DA Data-Aided
DD Decision-Directed
DFT Discrete Fourier Transform DPLL Digital Phase Locked Loop FI Frequência Intermediária FIR Finite Impulse Response
INPE Instituto Nacional de Pesquisas Espaciais ISI Intersymbol Interference
LNA Low Noise Amplifier LO Local Oscilator LOC Sinais de Localização ML Maximum Likelihood NDA Non Data-Aided
NCO Numerical Controller Oscilator
PCM-NRZ-L Pulse Code Modulation/Non-Return-to-Zero-Level PM Phase Modulation
RF Radio Frequência SHF Super High Frequency TEC Total Electron Content
TTC Tracking, Telemetry and Command Stations VHF Very High Frequency
VCO Voltage Controller Oscilator
Sumário
Lista de Siglas iv
Lista de Figuras vii
1 Introdução 1
1.1 Motivação . . . 1
1.2 Descrição do Projeto . . . 3
1.3 Produção Científica e Contribuições. . . 3
1.4 Estrutura da Dissertação . . . 3
2 Modelo do Sistema 5 2.1 Modelo do Canal . . . 5
2.2 Modelo do Demodulador . . . 7
2.2.1 Pré-processamento Analógico . . . 8
2.2.2 Demodulador Digital . . . 10
3 Conversor Banda Passante/Banda Base 13 3.1 Amostragem em Banda Passante . . . 13
3.2 Primeira Técnica de Interpolação . . . 16
3.2.1 Análise do Ruído . . . 16
3.3 Segunda Técnica de Interpolação . . . 19
3.3.1 Análise do Ruído . . . 20
4 Filtragem Ótima 21 4.1 Projeto do Filtro Referente ao Primeiro Interpolador . . . 21
4.1.1 Análise de Desempenho . . . 22
4.2 Projeto do Filtro Referente ao Segundo Interpolador . . . 24
4.2.1 Análise de Desempenho . . . 25
5 Sincronismo de Símbolo 26 5.1 Estimador de Oerder&Meyr. . . 27
5.2 Correção da Temporização . . . 28
5.3 Cálculo dos Parâmetros . . . 30
5.4 Estrutura de Farrow. . . 32
5.5 Análise da Variância . . . 33
6 Digital Phase Locked Loop 36
6.1 Função de Transferência . . . 36
6.2 Estabilidade e Tempo de Aquisição do PLL . . . 38
6.3 Análise da Variância . . . 39
7 Resultados 41 7.1 Desempenho dos Interpoladores e Filtros Ótimos . . . 41
7.2 Tamanho da Janela de Sìmbolos do Estimador de Oerder&Meyr . . . 42
7.3 Taxa de Erro de Bits do Demodulador . . . 43
7.4 Constelação de Símbolos e Diagrama de Olho . . . 44
7.5 Variância dos Estimadores . . . 44
7.6 Tempo de Aquisição . . . 47
8 Conclusão e Perspectivas 50
Referências Bibliográficas 52
Lista de Figuras
1.1 Sistema de Comunicação via Satélite.. . . 2
2.1 Canal de Comunicação Espacial. . . 5
2.2 Regiões de Cintilação Atmosférica. . . 7
2.3 Modelo do Receptor. . . 8
2.4 Espectro de Potência do Pulso em Banda Base. . . 9
2.5 Modelo do Demodulador. . . 10
3.1 Modelo do Conversor. . . 14
5.1 Diagrama de blocos da estrutura recuperadora de sincronismo de símbolo. . . . 27
5.2 Diagrama de blocos da estrutura recuperadora de sincronismo de símbolo. . . . 28
5.3 Ilustração dos instantes de amostragem e interpolação. . . 29
5.4 Função dente-de-serra. . . 31
5.5 Diagrama de blocos da estrutura recuperadora de sincronismo de símbolo. . . . 32
5.6 Diagrama de blocos da estrutura recuperadora de sincronismo de símbolo. . . . 33
6.1 Estrutura do DPLL. . . 36
6.2 Modelo Equivalente do DPLL. . . 37
6.3 Modelo Linear do DPLL.. . . 38
6.4 Pólo do PLL.. . . 39
6.5 Resposta do PLL ao Degrau Unitário. . . 40
6.6 Medição da Curva-S. . . 40
7.1 Densidade Espectral de Potência dev2[n]. . . 42
7.2 Comparação da Taxa de Erro de Bits dos Conversores. . . 42
7.3 Influência do Tamanho da Janela de Símbolos no Desempenho do Sistema. . . . 43
7.4 Taxa de Erro de Bits. . . 44
7.5 Constelação na Entrada do DPLL. . . 45
7.6 Constelação na Saída do DPLL. . . 45
7.7 Diagrama de Olho na Entrada do Sincronizador de Símbolo. . . 46
7.8 Diagrama de Olho na Saída do Sincronizador de Símbolo.. . . 46
7.9 Variância da Estimativa de Fase. . . 47
7.10 Variância da Estimativa do Atraso de Símbolo. . . 48
7.11 Tempo de Aquisição da Estimativa de Fase. . . 49
7.12 Tempo de Aquisição da Estimativa de Atraso. . . 49
Capítulo
1
Introdução
1.1 Motivação
Sistemas de comunicação por satélite são o resultado de intensas pesquisas nas áreas de telecomunicação e tecnologia espacial, cujos objetivos são atingir maiores coberturas e capacidades de transmissão a um custo cada vez menor. Durante a Segunda Guerra Mundial, houve um grande estímulo à expansão de duas tecnologias bastante distintas: propulsão a jato e comunicações por micro-ondas. O conhecimento adquirido no uso combinado destas duas técnicas favoreceu o início da era das comunicações por satélite.
Podemos dividir um sistema de comunicação por satélite em três partes distintas [1], conforme ilustrado na Figura 1.1:
i. Segmento espacial: contem um ou mais satélites ativos organizados em uma constelação. ii. Segmento de controle: consiste em todas as estações terrestres cujo objetivo é o controle e monitoramento dos satélites, também conhecidas pelo termo em inglês Tracking, Telemetry and Command Stations(TTC).
iii. Segmento de solo: consiste em todas as estações de comunicação em solo como celulares, antenas de rádio e TV, etc.
Podemos subdividir os componentes de um satélite em duas partes: a carga útil e a plataforma. A carga útil é composta pelas antenas de recepção e transmissão e todo equipamento eletrônico embarcado que dá suporte à transmissão dos sinais em diferentes faixas de frequência (transponders). A plataforma, por sua vez, consiste em todos os subsistemas que permitem o funcionamento da carga útil do satélite. Abaixo, enumeramos estes subsistemas e suas respectivas funções:
i. Controle de atitude: controlar o apontamento do satélite no espaço.
ii. Suprimento de energia: fornecer a energia necessária aos diversos subsistemas.
iii. Telecomunicação de serviço: enviar e receber os dados que permitem o acompanhamento do funcionamento e comando do satélite.
iv. Gestão de bordo: processar as informações recebidas da ou a serem enviadas para a Terra e as informações internas ao satélite.
1.1. Motivação 2
Figura 1.1:Sistema de Comunicação via Satélite.
vi. Controle térmico: manter os equipamentos em suas faixas nominais de temperatura. vii. Propulsão: fornecer o empuxo necessário para o controle de atitude e da órbita.
O trabalho desenvolvido aqui nesta dissertação concerne ao subsistema de telecomunicação de serviço, o qual possui importância vital no monitoramento e controle de um satélite. Ele é responsável pelas funções de telecomando (envio de sinais de controle) e telemetria (transmissão de resultados de medidas e informações sobre o equipamento e medições da posição e velocidade do satélite).
1.2. Descrição do Projeto 3
No caso do canal de telecomando para missões em que a altura for menor que 2 x 106
km (Categoria A) e para altas taxas de transmissão de até 2048 Mb/s, o CCSDS sugere a modulação BPSK direta da portadora pelo sinal de banda base formatado por um pulso retangular.
Como o Brasil não dispõe ou domina plenamente essa tecnologia destinada à comunicação espacial, este trabalho propõe o desenvolvimento de um demodulador BPSK, para o canal de telecomando de alta velocidade (1 Mb/s), a ser aplicado em futuros satélites do Instituto Nacional de Pesquisas Espaciais (INPE). Todo o processamento realizado pelo demodulador é digital, desde a conversão banda passante para banda base, passando por todos blocos de recuperação de sincronismo, até a deteção de símbolos. Essa abordagem reduz a complexidade do sistema, pois dispensa o uso de conversores analógicos de frequência, os quais estão frequentemente sujeitos a imperfeições.
1.2 Descrição do Projeto
O demodulador descrito neste trabalho é constituído de quatro blocos principais, projetados separadamentes. São eles, em ordem de processamento:
i. Conversor Analógico/Digital e Banda Passante/Banda Base (A/D-BP/BB): Neste bloco, o sinal analógico recém filtrado pelo filtro de Frequência Intermediária (FI) é amostrado simultaneamente à conversão de banda passante para banda base. Logo após, realiza-se uma operação de interpolação a fim de recuperar amostras que são perdidas neste processo.
ii. Filtro Ótimo: Após a saída do interpolador, o sinal é filtrado por um filtro ótimo projetado especificamente para mitigar os efeitos do ruído colorido resultante da operação de interpolação.
iii. Sincronismo de Símbolo: Aqui a estimativa do atraso de símbolo é realizada por um estimador de Oerder&Meyr, variante digital do conhecido estimador quadrático, sendo logo após utilizada para a correção da temporização feita através de uma combinação de filtros de resposta o impulso finita, em inglês Finite Impulse Response (FIR), conhecido como estrutura de Farrow.
iv. Digital Phase Locked Loop (DPLL): Este último bloco é um PLL completamente digital de primeira ordem para a correção do desvio de fase, ajuste fino do sincronismo de frequência e detecção dos símbolos.
As análises matemáticas detalhadas de cada bloco constituinte do sistema serão feitas nos capítulos subsequentes de acordo com a ordem aqui apresentada.
1.3 Produção Científica e Contribuições
Este trabalho resultou na aceitação para publicação do artigo “New Interpolator and Data Detector for Full Digital BPSK Demodulator” [4], nos anais do 2014 International Telecommunications Symposium (ITS), realizado nos dias 17 a 20 de agosto de 2014, em São Paulo, SP.
1.4 Estrutura da Dissertação
O presente trabalho está dividido da seguinte forma:
1.4. Estrutura da Dissertação 4
espacial e os efeitos da atmosfera terrestre sobre a propagação de uma onda eletromagnética. Na segunda parte, o processamento no receptor é descrito, sendo este dividido em duas fases: o pré-processamento analógico e o demodulador digital.
◮ Capítulo 3: Este capítulo apresenta a análise matemática da amostragem em banda passante e da conversão banda passante para banda base que, como dito anteriormente, ocorre simultaneamente à amostragem. Logo após, duas opções de interpolação são apresentadas e, em seguida, a análise do efeito que cada uma delas tem no ruído é feita. ◮ Capítulo 4: Com base na análise do ruído e das equações dos sinais amostrados e em banda base, obtidas no capítulo anterior, o filtro ótimo para cada tipo específico de ruído, resultante das duas interpolações, é descrito. Segue-se a isto a análise de performance da filtragem utilizada.
◮ Capítulo 5: Neste capítulo a análise do sincronismo de símbolo é realizada. Primeiramente, a operação do estimador utilizado para a obtenção do atraso é descrita, seguido da apresentação do algoritmo para o cálculo dos parâmetros, obtidos a partir da estimativa de atraso, utilizados para controlar a estrutura que efetua a correção propriamente dita. Esta estrutura também tem seu funcionamento descrito e o capítulo finaliza com a análise da variância de estimação da fase.
◮ Capítulo 6: Aqui a operação doDPLLé apresentada, bem como as análises de tempo de aquisição, estabilidade e variância do estimador.
◮ Capítulo 7: Neste capítulo são apresentados os parâmetros utilizados e os resultados da simulação computacional. Estes últimos são: taxa de erro de bits, variância dos estimadores de fase e símbolo e seus respectivos tempos de aquisição.
Capítulo
2
Modelo do Sistema
2.1 Modelo do Canal
Um sistema de comunicação pode ser dividido em três partes principais: o transmissor, o canal de comunicação e o receptor. No modelo que utilizamos neste trabalho considera-se que o transmissor é uma estação de controle terrestre, o canal de comunicação é composto pela atmosfera terrestre, onde consideramos relevantes os efeitos Doppler e a adição de ruído branco gaussiano, e o receptor é embarcado em um veículo espacial em órbita baixa, na qual funciona o demodulador proposto. A Figura 2.1 mostra o diagrama do sistema de comunicação aqui estudado.
Figura 2.1:Canal de Comunicação Espacial.
O efeito da atmosfera terrestre sobre a propagação de ondas eletromagnéticas entre a terra e o espaço é uma preocupação constante no projeto de sistemas de comunicação espaciais. Esses efeitos podem causar variações indesejáveis na amplitude, na fase e na polarização do sinal, o que resulta na redução da qualidade do enlace radioelétrico com o consequente crescimento da taxa de erro de bits. A relevância desses fenômenos depende da frequência de operação, do clima, da geografia local, do tipo de transmissão e do ângulo de elevação do satélite.
2.1. Modelo do Canal 6
faixa Very High Frequency (VHF), em torno de 140 MHz, a Super High Frequency (SHF), atingindo até 30 GHz (banda Ku) [1]. Para essas faixas de frequências, duas regiões da atmosfera têm uma grande influência sobre o sinal eletromagnético: a troposfera e a ionosfera. A troposfera se estende da superfície terrestre até uma altitude de 15 km e a ionosfera situa-se entre 70 e 1000 km. A influência destas regiões sobre o sinal eletromagnético é máxima nas proximidades do solo, para a troposfera, e a uma altitude em torno de 400 km, para a ionosfera.
Alguns dos efeitos predominantes da troposfera são aqueles causados pela absorção e despolarização devido à precipitação (chuva e neve). Esses efeitos são particularmente significantes para frequências maiores que 10 GHz. Para canais de telemetria e telecomando, no entanto, cuja faixa de operação situa-se abaixo desta frequência, estes fenômenos troposféricos são de pequena importância.
A ionosfera reflete, refrata ou absorve as ondas eletromagnéticas com frequências abaixo de 30 MHz, impossibilitando a comunicação espacial nessa faixa. À medida que se aumenta a frequência, os efeitos da ionosfera perdem intensidade, e acima de 3 GHz a ionosfera é praticamente transparente para a comunicação espacial. Essa clareza ionosférica se mantém até as frequências nas quais os gases constituintes da troposfera, basicamente o oxigênio e o vapor de água, absorvem a energia do sinal eletromagnético [5].
A ionização e as irregularidades da ionosfera são as causas da degradação dos sinais na faixa de frequência de 30 MHz a 3 GHz. Rotação de polarização, atraso de grupo, dispersão, desvio Doppler de frequência, mudança da direção da chegada do sinal e absorção são as degradações relacionadas a efeitos sob a influência da ionização, nos quais estão associados ao conteúdo total de elétrons encontrados no percurso do sinal (do inglês Total Electron Content(TEC)). De outro lado, o principal efeito atribuído às irregularidades ionosféricas é a cintilação, a qual provoca rápidas flutuações na amplitude e fase do sinal recebido, causadas por irregularidades de pequena escala no percurso.
Mais especificamente, cintilação é a variação da amplitude da portadora causada pelas variações do índice de refração da ionosfera, o qual depende diretamente da frequência e do
TEC. A amplitude pico-a-pico dessas variações, na banda Ku a latitudes médias, pode exceder 1 dB para 0,01% do tempo. A cintilação ionosférica é mais severa nas regiões equatoriais e polares, e nos períodos do nascer e do pôr do sol, como pode ser observado na Figura 2.2. Nesta figura, são mostradas as áreas de incidência de cintilação na banda L (1 – 2 GHz) para períodos de máxima e de mínima atividade solar, bem como o efeito diurno da cintilação. As zonas mais intensas ocorrem por volta de meia-noite nas regiões equatoriais. Contudo as regiões temperadas, que abrangem grande parte do território brasileiro, não são afetadas por esse efeito.
A imperfeição do canal mais significativa e considerada neste estudo sobre comunicação espacial é a dispersão da faixa de frequência do sinal provocada pelo efeito Doppler, o qual é devido à velocidade relativa entre o transmissor e o receptor. No que diz respeito à frequência da portadora, seu desvio de frequência pode ser calculado pela expressão:
fDoppler= vcosθ
c fc (2.1)
2.2. Modelo do Demodulador 7
Figura 2.2: Regiões de Cintilação Atmosférica.
150 kHz em sistemas cuja frequência da portadora éfc= 8GHz [3].
A não linearidade do receptor é outra imperfeição relevante do canal espacial. Devido às limitações de recursos energéticos em um satélite, para aumentar a sua eficiência, o amplificador de potência do receptor opera próximo da região de saturação. Essa característica pode distorcer o sinal, e dentre outros efeitos, levar ao reforço dos lóbulos laterais do espectro de frequências do sinal. Entretanto, o demodulador em estudo destina-se a satélites de órbita baixa, cuja potência necessária para transmissão no canal de telecomando permite o uso de amplificadores de potência na faixa linear. Portanto, neste trabalho, não se considera qualquer não linearidade na modelagem do canal.
2.2 Modelo do Demodulador
Começaremos a descrever agora, em linhas gerais, os blocos que constituem um receptor clássico para comunicações espaciais, especificando em seguida, as funcionalidades implementadas no nosso demodulador. Nosso objetivo aqui é conceder ao leitor um panorama de todo processamento que é realizado, desde a recepção do sinal, pela antena, até a detecção dos símbolos transmitidos, no último estágio de processamento do demodulador, de forma que ao final desta seção tenhamos uma visão geral desta cadeia de operações efetuadas sobre o sinal recebido e que será aprofundada nos capítulos subsequentes deste trabalho.
2.2. Modelo do Demodulador 8
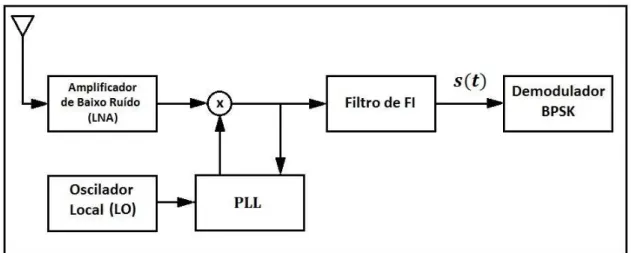
Figura 2.3:Modelo do Receptor.
2.2.1 Pré-processamento Analógico
Observando a Figura 2.3, que mostra o diagrama de blocos do receptor, vemos que o primeiro estágio de processamento logo após o sinal passar pelo amplificador de baixo ruído (em inglêsLow Noise Amplifier (LNA)) é a correção do desvio de frequência, em consequência do efeito Doppler, através da multiplicação do sinal amplificado por uma senóide gerada por um PLL [7]. Simultaneamente, ocorre a conversão de Radio Frequência (RF) para FI; especificamente neste caso, a frequência deFI(fF I) é igual a 70 MHz. O PLL, através de um sinal de referência de um oscilador local (em inglêsLocal Oscilator (LO)) gera o batimento que realiza essa conversão; logo em seguida o sinal é entregue a um filtro, centrado emfF I, cuja resposta em frequência é considerada ideal e descrita pela equação:
HF I(f) =
(
1, se |f−fF I| ≤W, 0, se |f−fF I|> W,
(2.2)
onde W é a largura de banda do sinal em banda base, neste caso igual a 10 MHz e o valor escolhido para a largura de banda do filtro será 20 MHz.
O sinals(t), na saída do filtro de FI, pode ser modelado pela seguinte equação:
s(t) =A(t) cos[2π(fF I+fd)t+ϕ] +w(t), (2.3)
onde o sinal de banda baseA(t)é dado por
A(t) =X i
aigT(t−iT−ǫT), (2.4)
ai são o símbolosBPSKtransmitidos,T é o período de símbolo,fd,ϕeǫsão, respectivamente, o erro residual de frequência decorrente da imprecisão do oscilador analógico, o erro de fase e o atraso de símbolo e gT(t) é o pulso de banda base, neste caso uma janela retangular, definida da seguinte forma:
gT(t) =
r
Ts
T rect( t−T /2
T ), (2.5)
rect(t/T) =
(
1, se |t| ≤T
2,
0, se |t|>T2,
2.2. Modelo do Demodulador 9
Figura 2.4: Espectro de Potência do Pulso em Banda Base.
seguinte densidade espectral de potência:
Sw(f) =
(
No/2, se |f−fF I| ≤W, 0, se |f−fF I|> W.
(2.6)
Conforme mencionado acima, o pulso de banda base é uma janela retangular, o que nos obriga a fazer algumas considerações a respeito. Como bem sabemos, e conforme pode ser visualizado na Figura 2.4, este tipo de pulso possui uma representação no domínio da frequência que se estende infinitamente e cujas amplitudes dos lóbulos laterais são bem maiores que as apresentadas por outros tipos de pulsos mais comumente utilizados, como o cosseno levantado [8]. Isso significa que pulsos desta natureza podem causar interferências em canais de comunicação adjacentes; um problema que é resolvido realizando uma filtragem no transmissor que mantém o sinal dentro de uma faixa de frequência segura pré-determinada.
Se o problema da interferência em canais adjacentes é resolvido com uma filtragem no transmissor, temos agora um novo questionamento: o ato da filtragem, tanto a realizada no transmissor antes do envio do sinal quanto a filtragem em FI no receptor, elimina uma parte do conteúdo de frequência do sinal, cuja consequência no domínio do tempo será a de prolongar o pulso, podendo resultar em interferência intersimbólica. Porém, observa-se que as larguras de banda dos filtros utilizados, especialmente a do filtro deFIque é2W =20 MHz, são suficientemente grandes a fim de não provocarem distorções significativas no sinal.
2.2. Modelo do Demodulador 10
Figura 2.5: Modelo do Demodulador.
à
esse erro residual é muito pequeno, da ordem de 7 Hz, e será facilmente corrigido quando tratarmos do erro de fase.
2.2.2 Demodulador Digital
Seguindo a conversão de RF para FI e filtragem analógica em FI, temos a conversão de frequência para banda base. Normalmente em demoduladores digitais ela é realizada através de dispositivos analógicos, para logo em seguida, efetuar-se a discretização dos sinais convertidos. Esse arranjo possibilita a utilização de dispositivos digitais mais simples devido à taxa de operação reduzida, mas por outro lado, está sujeita a eventuais imperfeições decorrentes do uso de dispositivos analógicos na conversão de frequência sem a recuperação de sincronismo nesse estágio.
No demodulador proposto, a operação de amostragem do sinal recebido é realizada no conversorA/D-BP/BB logo após a filtragem em FI, de forma que a conversão da frequência intermediária para banda base ocorra simultaneamente a este processo [9]. Isto é alcançado amostrando-se o sinal recebido através da multiplicação por uma sequência de pulsos específica e a uma taxa inferior a da frequência da onda portadora [10]; as amostras resultantes desta operação estão dispersas de tal forma que o sinal discretizado já encontra-se convertido para banda base. Esta configuração dispensa o uso de componentes analógicos como o oscilador controlado por tensão (em inglês Voltage Controller Oscilator (VCO)) e o misturador, além de possuir uma estrutura simplificada por técnicas de processamento digital de sinais.
A amostragem realizada em FI descrita acima apresenta um inconveniente: como o período de amostragem, como veremos em detalhes no Capítulo 3, é múltiplo dekπ
2, o sinal
será amostrado em instantes de tempo em que sua amplitude é nula. Em consequência, metade de suas amostras serão nulas, resultando em uma enorme queda de desempenho do demodulador. Este problema foi resolvido através de uma operação de interpolação sobre estas amostras; neste trabalho apresentaremos duas opções de interpolador a ser utilizado.
As interpolações usadas para corrigir o problema da perda das amostras são operações não-lineares. Através da análise da função de autocorrelação do ruído veremos que umas das opções apresentadas colore o ruído e, portanto, necessita de uma filtragem específica para mitigar seus efeitos sobre o sinal recebido. No Capítulo 4, utilizando as informações que obtemos no Capítulo 3 sobre a autocorrelação do ruído, faremos o projeto do filtro ótimo para cada tipo de ruído resultante de cada interpolador.
2.2. Modelo do Demodulador 11
o atraso de símbolo eT é o período de símbolo. Em um receptor analógico a solução para este problema é o controle do instante de amostragem do sinal recebido, ou seja, o processo de amostragem deve ser sincronizado com a temporização do símbolo. Uma modificação dessa solução seria obter a informação da temporização do símbolo das amostras no receptor e controlar o instante de amostragem, obtendo assim, uma solução híbrida para o problema do sincronismo.
No nosso caso completamente digital, só existem amostras em instantes de tempo múltiplos do período de amostragemTs, diferente da taxa de símbolos 1
T. As amostras sem o atraso de símbolo devem ser obtidas então a partir de um algoritmo operando apenas sobre o sinal amostrado a cada instante de tempo kTs. Temos aqui dois problemas a solucionar: como, a partir do sinal proveniente do filtro ótimosC[n], identificar o instante ótimo em que a energia do símbolo é maximizada e, com esse resultado em mãos, como calcular o valor do sinal recebido nestes instantes.
Lembrando que precisamos ter amostras no instante de tempot=kT+ǫT, escrevemos:
kT+ǫT =Ts[kT Ts
+ǫT Ts
], (2.7)
que pode ser reescrita da seguinte forma:
[kT Ts
+ǫT Ts
] =int(kT Ts
+ǫT Ts
) +µkTs=lkTs+µkTs, (2.8)
onde int(.) significa o maior inteiro imediatamente menor ou igual ao número real no argumento e, portanto, lkTs representa a parte inteira do instante de amostragem e µkTs representa a parte fracionária. De posse destas equações, podemos dividir o processo da recuperação do sincronismo de símbolo em duas partes: a estimação do atraso, onde o tempo de atraso ǫ é estimado e os parâmetros (lk, µk) são calculados a partir dele e a correção do atraso, onde a partir das amostrassC[n]é obtido um conjunto de novas amostras, através de um processo de interpolação que será detalhado posteriormente [11].
Finalmente chegamos à última etapa do processamento do sinal recebido, a recuperação do sincronismo de fase e detecção dos símbolos. Existem inúmeras técnicas na literatura para a realização do sincronismo e para detecção dos dados, porém escolhemos utilizar um Phase-Locked Loop (PLL). O PLL é encontrado em incontáveis aplicações na área de telecomunicações, as quais envolvem modulação, síntese de frequências e especialmente nosso problema, o da sincronização em sistemas analógicos e digitais. Devido à sua vasta utilização, é possível encontrá-lo em forma de circuitos integrados, onde alguns poucos componentes externos precisam ser adicionados.
Neste trabalho, utilizamos uma variante digital do PLL, oDPLL, conhecido também como Costas Loop digital. ODPLLé basicamente constituído por: um comparador de fase, um filtro passa-baixa também conhecido como filtro de loop e um oscilador númerico controlado por tensão (em inglês Numerical Controller Oscilator (NCO)). O comparador de fase proporciona uma saída proporcional à diferença de fase entre a onda de entrada e a onda de saída do
2.2. Modelo do Demodulador 12
Capítulo
3
Conversor Banda Passante/Banda
Base
Neste ponto do trabalho, faremos a análise matemática detalhada do conversor utilizado no demodulador. Durante o decorrer do projeto foram desenvolvidas e testadas duas arquiteturas diferentes, as quais realizam as mesmas três operações fundamentais no sinal recebido; são elas: a amostragem, conversão para banda base e a interpolação das amostras em cada componente de fase e quadratura do sinal.
A diferença entre as duas arquiteturas está na operação de interpolação das amostras e, por este motivo, serão analisadas separadamente. Para cada técnica de interpolação, descreveremos o funcionamento do algoritmo utilizado e, em seguida, faremos a análise das estatísticas do ruído. Mais especificamente, faremos uma análise da função de autocorrelação do ruído, a qual será utilizada no capítulo seguinte para o projeto do filtro ótimo.
Prosseguiremos nas próximas seções com o estudo de cada uma das etapas de processamento mencionadas acima. Começando pela amostragem do sinal e pela conversão de FI para banda base, depois será tratado cada interpolador separadamente, o que inclui a análise do ruído na saída de cada um deles. Toda análise será feita determinando-se as expressões para os sinais e os diagramas de bloco de cada componente do conversor para, ao final, obtermos a função de autocorrelação para o ruído.
3.1 Amostragem em Banda Passante
Como dito anteriormente, a primeira operação no conversor é a amostragem, que será realizada enquanto o sinal se encontra ainda no estágio de FI, onde a frequência da portadora será igual a fF I = 70 MHz. Essa técnica de amostragem permite que, simultaneamente, ocorra a conversão de banda passante para banda base, através da multiplicação do sinals(t) por uma sequência de impulsos ponderados por valores pré-determinados. Neste trabalho, porém, apenas para fins de análise, consideraremos amostragem e conversão BP/BB como duas operações separadas.
3.1. Amostragem em Banda Passante 14
espectro positivo do sinal comofue a mais baixa comofl, é dada pela seguinte fórmula [6,12]: 2fu
q ≤fs≤
2fl
q−1, (3.1)
ondeqé um inteiro satisfazendo a seguinte condição:
1≤q≤int( fu
fu−fl
). (3.2)
O sinal amostrados[n]pode ser escrito da seguinte forma:
s[n] =ℜ{A[n]ej[2π(fF I
+fd
fs )n+ϕ]}+w[n], (3.3) ondeA[n]ew[n]são versões discretas dos sinaisA(t)ew(t). Neste trabalho, demos preferência a usar uma variante mais específica da equação (3.1), onde fs = 24KfF I+1, K ∈ N. A onda
senoidal será amostrada de tal forma que os valores serão tomados a cada kπ
2 , ou seja, caso
pudéssemos visualizar apenas a portadora amostrada não-modulada, obteríamos a sequência
{0,1,0,−1,0, ...}. Após substituirmos a equação anterior da taxa de amostragem em (3.3) e lembrando queωd= 2πfdTs, o sinalsn[n]fica:
s[n] =ℜ{A[n]ej(ωdn+ϕ)ej(Kπ+π2)n}+w[n]. (3.4) No nosso caso específico temosK = 3 e consequentementefs = 40 MHz. Substituindo esses valores na equação acima, teremos:
s[n] =ℜ{A[n]ej(ωdn+ϕ)ej(7π2)n}+w[n]. (3.5) Reescrevendo em termos da função cosseno:
s[n] =A[n] cos[(7π
2 +ωd)n+ϕ] +w[n]. (3.6)
Figura 3.1: Modelo do Conversor.
3.1. Amostragem em Banda Passante 15
produto do sinal recebido por duas ondas portadoras locais (um seno e um cosseno) na mesma frequência da portadora do sinal, cujo resultado são as componentes em fase e quadratura deste. Esta sequência pode ser modelada matematicamente como:
p[n] = cos(7πn 2 )−sin(
7πn
2 ).
Procedendo com a análise, escrevemos o sinal em banda basesA[n]da seguinte forma:
sA[n] =s[n]·p[n]
={A[n] cos[(7π
2 +ωd)n+ϕ] +w[n]} · {cos
7π
2 n−sin 7π
2 n}
=A[n] cos[(7π
2 +ωd)n+ϕ] cos( 7πn
2 )−A[n] cos[( 7π
2 +ωd)n+ϕ] sin( 7πn
2 ) +z[n], (3.7) onde z[n] é o processo aleatório resultante da multiplicação de w[n] por p[n]. Utilizando as identidades trigonométricas de produto entre cossenos e senos, desenvolvemos a expressão do sinalsA[n]:
sA[n] = A[n]
2 {cos(ωdn+ 7πn+ϕ) + cos(ωdn+ϕ)} −
A[n]
2 {sin(ωdn+ 7πn+ϕ)−sin(ωdn+ϕ)}+z[n]
= A[n]
2 {cos(ωdn+ϕ) cos 7πn−sin(ωdn+ϕ) sin 7πn+ cos(ωdn+ϕ)}
−A[n]
2 {sin(ωdn+ϕ) cos 7πn+ cos(ωdn+ϕ) sin 7πn−sin(ωdn+ϕ)}+z[n].
Comosin 7πn= 0ecos 7πn= cosπn, reorganizando a expressão:
sA[n] = A[n]
2 {cos(ωdn+ϕ)(cos 7πn+ 1)−sin(ωdn+ϕ)(cos 7πn−1)}+z[n]
= A[n]
2 {cos(ωdn+ϕ)(cosπn+ 1)−sin(ωdn+ϕ)(cosπn−1)}+z[n]
= A[n]
2 {cos(ωdn+ϕ)((−1)
n+ 1)−sin(ω
dn+ϕ)((−1)n−1)}+z[n], (3.8) onde a identidadecos 7πn= (−1)né facilmente demonstrável. Finalmente, podemos reescrever mais uma vez a expressão do sinal sA[n] a fim de obter uma maior compreensão do seu comportamento em relação às suas componentes em fase e em quadratura:
sA[n] =
(
A[n] cos(ωdn+ϕ) +z[n], se npar,
A[n] sin(ωdn+ϕ) +z[n], se nímpar.
(3.9)
Pela última equação podemos ver que o valor de sA[n] será o sinal de banda base A[n] ora modulado por um cosseno, quandonfor par, ora modulado por um seno, quandonfor ímpar. A frequência e a fase destas senóides são: o erro residual de frequênciaωd e o erro de fase
ϕ. Multiplexando cada um desses sinais em tempos pares e ímpares, temos as componentes em fase e quadratura do sinal sA[n]; no entanto, ao fazer isso, teremos apenas metade das amostras por símbolo em cada componente, o que nos obriga a realizar uma interpolação das amostras do sinal.
3.2. Primeira Técnica de Interpolação 16
na Equação (3.9). Baseado nisto, será suficiente fazermos a análise para apenas um dos interpoladores, que será o que atua sobre a componente em fase; uma escolha óbvia, uma vez que a modulação utilizada neste projeto é o BPSK.
Como nosso principal objetivo neste capítulo é o estudo do efeito do conversor sobre o sinal recebido, podemos ignorar os problemas de sincronismo nas análises matemáticas que se seguem e assumir que a sincronização do sinal está perfeita. Logo, fazendoωd =ϕ= 0, a Equação (3.9) reduz-se a:
sA[n] =
(
A[n] +z[n], se npar,
z[n], se nímpar. (3.10)
Portanto, nosso problema imediato é descobrir como recuperar a amostra ímpar do sinalA[n]. Existem várias possibilidade de resolver esta questão, incluindo interpolações lineares e não lineares. Na próxima seção, apresentaremos a primeira técnica de interpolação proposta e analisaremos as propriedades estatísticas do ruído no sinal de saídasBI[n].
3.2 Primeira Técnica de Interpolação
Lembrando que o pulso de banda base é retangular, dado pela Equação (2.5), as amostras do sinal A[n] são, para cada símbolo transmitido, contantes e iguais a qTs
T ou −
q
Ts T, dependendo da informação enviada. Portanto, uma técnica de interpolação bastante simples e elementar é dar à amostra perdida o mesmo valor da anterior [4]. Esta operação pode ser descrita pela equação:
sBI,1[n] =
(
A[n] +z[n], se npar,
A[n−1] +z[n−1], se nímpar, (3.11)
onde utilizamos o subscrito 1 para diferenciar do resultado da segunda técnica de interpolação. Para um dado simbolo, o sinalsBI,1[n]pode ser expresso de uma maneira mais
simplificada:
sBI,1[n] = ˆA[n] +v1[n], (3.12)
ondeAˆ[n]é uma estimativa do sinal de banda base transmitidoA[n]na saída do interpolador, e é dado pela expressão:
ˆ
A[n] =
(
A[n], se npar,
A[n−1], se nímpar, (3.13)
ev1[n]é o ruído colorido, representado por:
v1[n] =
(
z[n], if npar,
z[n−1], if nímpar. (3.14)
A análise da função de autocorrelação do ruídov1[n]será realizada na subseção seguinte.
3.2.1 Análise do Ruído
Para chegarmos à função de autocorrelação dev1[n], começaremos pela expressão do ruído
3.2. Primeira Técnica de Interpolação 17
[13]:
Rw(∆t) =
Z ∞ −∞
Sw(f)e2πf∆tdf. (3.15) Portanto, substituindo (2.2) em (3.15) e resolvendo a integral, teremos:
Rw(∆t) = No
j4π∆t[e
2π(−fF I+W)∆t−e2π(−fF I−W)∆t] + No
j4π∆t[e
2π(fF I+W)∆t−e2π(−fF I−W)∆t]. (3.16)
Reorganizando a expressão acima e colocando-a em termos de funções trigonométricas, ao invés de exponenciais complexas, chegamos a:
Rw(τ) = 2NoW sinc(2W τ)cos(2πfF I∆t). (3.17)
Temos assim, a função de autocorrelação para o ruídow(t)na entrada do demodulador. Logo após, o ruído é amostrado a uma taxafs, cuja relação com a largura de banda do filtro de FI é2W = 21Ts; colocandoW em função deTse substituindo na função de autocorrelação para o ruído discretizado, teremos:
Rw[m] =Rw(mTs)
= 2No( 1 4Ts
)sinc[2( 1 4Ts
)mTs] cos[2π( 7 4Ts
)mTs]
= No 2Ts
sinc(m 2) cos(
7π
2 )
= No 2Ts
δ[m]. (3.18)
Da Equação (3.18), podemos concluir que o ruído discretow[n]é branco. Nosso próximo passo é provar que, após a multiplicação do sinal recebido por p[n], o processo ruidoso resultante
z[n] = w[n]p[n] também é branco e que sua função de autocorrelação é idêntica à de w[n]. Utilizando a definição de função de autocorrelação, temos:
Rz[n, n+m] =E{z[n]z[n+m]}
=E{w[n]p[n]w[n+m]p[n+m]}
=E{w[n]w[n+m]}p[n]p[n+m]
=Rw[m]p[n]p[n+m], (3.19)
onde E{x} é o operador esperança matemática de x e o produto de p[n] por p[n+m] pode ser retirado do operador, uma vez que este é um sinal determinístico. Desenvolvendo este produto:
p[n]p[n+m] ={cos(7πn 2 )−sin(
7πn
2 )} · {cos[
7π
2 (n+m)]−sin[ 7π
2 (n+m)]}
= cos(7πn 2 )·cos[
7π
2 (n+m)]−cos( 7πn
2 )·sin[ 7π
2 (n+m)]
−sin(7πn
2 )·cos[ 7π
2 (n+m)] + sin( 7πn
2 )·sin[ 7π
2 (n+m)].
Aplicando identidades trigonométricas à expressão acima, obtemos:
p[n]p[n+m] = cos(7πn
2 )−sin(7πn+ 7πm
3.2. Primeira Técnica de Interpolação 18
Substituindo (3.20) em (3.19), chegamos a:
Rz[n, n+m] =Rw[m]·[cos(7πn
2 )−sin(7πn+ 7πm
2 )] =Rw[m],
Rz[m] = No 2Ts
δ[m]. (3.21)
Obtemos assim quez[n]também é branco e queRw[m] =Rz[m], o resultado previsto acima. A saída do interpolador, levando em consideração apenas o termo relativo ao ruído, é dada pela Equação (3.14), e pode ser reescrita de uma forma mais simples, em uma única expressão:
v1[n] =
z[n]
2 [1 + cos(πn)] +
z[n−1]
2 [1−cos(πn)]. (3.22) A função de autocorrelação dev1[n]é:
Rv1[n, m] =E{v1[n]v1[n+m]}. (3.23) Desenvolvendo (3.23) usando a representação de v1[n] em (3.22), a expressão para Rv[n, m]
fica:
Rv1[n, m] = 1
4E{z[n]z[n+m][1 + cos(πn)][1 + cosπ(n+m)]}
+1
4E{z[n]z[n+m−1][1 + cos(πn)][1−cosπ(n+m)]}
+1
4E{z[n−1]z[n+m][1−cos(πn)][1 + cosπ(n+m)]}
+1
4E{z[n−1]z[n+m−1][1−cos(πn)][1−cosπ(n+m)]}.
Observando a equação acima, vemos que Rv1[n, m] consiste na soma de quatro esperanças matemáticas ponderadas por cossenos, onde cada um destes termos pode ser simplificado usando identidades trigonométricas. Tomemos a parte determinística do primeiro termo, ou seja o produto dos cossenos, e vamos desenvolvê-lo usando algumas identidades:
{1 + cos(πn)} · {1 + cos[π(n+m)]}= 1 + cos[π(n+m)] + cos(πn) + cos(πn) cos[π(n+m)]
= 1 + cos(πn)cos(πm)−sin(πn) sin(πm) + cos(πn)
+ cos(πn)[cos(πn) cos(πm)−sin(πn) sin(πm)].
Considerando quesin(πn) = sin(πm) = 0, a expressão acima reduz-se a:
{1 + cos(πn)} · {1 + cos[π(n+m)]}= 1 + cos(πn) cos(πm) + cos(πn) + cos(πm), (3.24)
então, a primeira esperança matemática na expressão deRv1[n, m], que chamaremos aqui de
E1, fica:
E1= 1
4·E{z[n]z[n+m]} · {1 + cos(πn) cos(πm) + cos(πn) + cos(πm)}
= 1
4·Rz[m]· {1 + cos(πn) cos(πm) + cos(πn) + cos(πm)}
= 1 4·
No 2Ts
3.3. Segunda Técnica de Interpolação 19
Pela expressão acima, vemos queE16= 0quandom= 0. Portanto:
E1=
No 4Ts
δ[m]{1 + cos(πn)}. (3.26)
Aplicando o mesmo raciocínio aos outros termos, temos:
E2= No
4Ts
δ[m−1]{1 + cos(πn)}, (3.27)
E3= No
4Ts
δ[m+ 1]{1−cos(πn)}, (3.28)
E4=
No 4Ts
δ[m]{1−cos(πn)}. (3.29) A expressão simplificada para a função de autocorrelação dev1[n], portanto, é:
Rv1[n, m] =E1+E2+E3+E4=
No 4Ts
δ[m](1 + cosπn)+
+No 4Ts
δ[m−1](1 + cosπn) + No 4Ts
δ[m+ 1](1−cosπn) + No 4Ts
δ[m](1−cosπn). (3.30) Reorganizando os termos mais uma vez, a expressão final fica:
Rv1[n, m] =
No 2Tsδ[m] +
No
4Tsδ[m−1](1 + cosπn) +
No
4Tsδ[m+ 1](1−cosπn). (3.31) Examinando esta equação, podemos concluir que o processo aleatóriov1[n]é cicloestacionário,
ou seja, ele é periodicamente estacionário, com um período discreto de duas amostras. Tendo em mente isto, com a finalidade de facilitar os cálculos nas análises posteriores, nós escolhemos trabalhar com a função de autocorrelação média, uma prática usual quando estamos tratando de processos cicloestacionários [8,14]. A autocorrelação média é definida como a média aritmética da função de autocorrelação em um único período. Aplicando este procedimento, a Equação (3.31) se reduz a:
Rv1[m] =
No 2Ts
δ[m] + No 4Ts
δ[m−1] + No 4Ts
δ[m+ 1]. (3.32)
Podemos facilmente concluir, das duas expressões acima, que o ruído v1[n] é colorido. A
consequência imediata desta conclusão é a necessidade do projeto de um novo filtro de recepção, baseado no critério de máxima verossimilhança, que otimize a relação sinal-ruído após a filtragem. Trateremos deste assunto no capítulo seguinte.
3.3 Segunda Técnica de Interpolação
Apresentamos nesta seção a segunda técnica de interpolação que pode ser utilizada para a recuperação das amostras no conversor. Esta operação consiste simplesmente em, ao invés de repetir a amostra de sinal ruidoso, eliminar a amostra ímpar ruidosa tornando-a nula. PortantosBI,2[n]fica:
sBI,2[n] =
(
A[n] +z[n], se npar,
3.3. Segunda Técnica de Interpolação 20
RepresentandosBI,2[n]como em (3.12), temos queAˆ[n]fica:
ˆ
A[n] =
(
A[n], se npar,
0, se nímpar, (3.34)
ev2[n]:
v2[n] =
(
z[n], se npar,
0, se nímpar. (3.35)
3.3.1 Análise do Ruído
Façamos agora a análise do novo ruídov2[n]. Escrevendo-o em uma única expressão, como
em (3.22), temos:
v2[n] =
z[n]
2 [1 + cos(πn)]. (3.36)
Aplicando o mesmo raciocínio do caso anterior, substuindo (3.37) na equação similar a (3.24), facilmente chegamos a expressão para a função de autocorrelação:
Rv2[n, n+m] =
No 4Ts
δ[m][1 + cos(πn)], (3.37)
ou para melhor visualização:
Rv2[n, n+m] =
( N
o
2Tsδ[m], se npar,
0, se nímpar, (3.38)
de onde concluímos que o ruído v2[n] também é cicloestacionário com um período de duas
amostras. Assim como fizemos nas seções anteriores, será útil para a análise seguinte, referente ao filtro ótimo, utilizarmos a função de autocorrelação média:
Rv2[m] =
No 4Ts
Capítulo
4
Filtragem Ótima
Finalizamos o capítulo anterior fazendo uma análise do efeito das duas interpolações sobre o ruído. Neste capítulo, aplicando o critério de máxima verossimilhança (do inglêsMaximum Likelihood (ML)) ao problema de detecção de simbolos, procuramos obter os coeficientes do filtro ótimo para mitigar os efeitos dos dois tipos de ruído encontrados anteriormente. Apesar de que nosso objetivo agora não é realizar a detecção propriamente dita, a qual só é realizada no estágio final do demodulador, desejamos encontrar uma estrutura que otimize a probabilidade de detectar corretamente o símbolo transmitido.
Podemos imaginar que, como as interpolações utilizadas são diferentes, os filtros ótimos usados após cada interpolador também serão diferentes, exigindo para cada caso um projeto específico de acordo com as características do ruído. Porém ao realizarmos as duas análises, veremos que apesar das características espectrais do ruído serem diferentes para cada caso, o filtro ótimo será um filtro casado com o pulso de transmissão para ambos os conversores.
4.1 Projeto do Filtro Referente ao Primeiro Interpolador
As amostras de sBI,1[n] contêm a informação de qual símbolo foi transmitido, portanto é
essencial projetar um filtro que, conforme dito anteriormente, maximize a probabilidade de recuperar os simbolos transmitidos a partir da observação destas amostras. O número de amostras por símbolo é igual a int(TT
s), porém como em nosso projeto T
Ts já é um número inteiro, o símbolointserá omitido a fim de simplificar a notação.
Nosso problema da detecção consiste em, após observar T
Ts amostras de sBI,1[n], escolher entre duas hipóteses:H0, se o símbolo transmitido foiai =−1, eH1, se o símbolo transmitido
foiai= 1. Começaremos definindo o vetors:
s=h sBI,1[n] sBI,1[n−1] · · · sBI,1[n−TTs+ 1]
iT
, (4.1)
que é o vetor das amostras correspondentes a um dado símbolo. Considerando um ruído gaussiano e colorido, as funções densidade de probabilidade conjunta, com respeito a cada hipótese, são:
ps(s|H0) =
exp{−12(s−m0)TR−1(s−m0)}
(2π)T /2Ts|R|1/2 , (4.2)
ps(s|H1) =
exp{−12(s−m1)TR−1(s−m1)}
4.1. Projeto do Filtro Referente ao Primeiro Interpolador 22
onde:
m0=h −1 −1 · · · −1 i
T
, (4.4)
m1=h 1 1 · · · 1 i
T , (4.5) R= No
2Ts No
4Ts 0 0 · · · 0
No
4Ts No
2Ts No
4Ts 0 · · · 0
0 No
4Ts No
2Ts No
4Ts · · · 0
0 0 No
4Ts No
2Ts · · · 0
..
. ... ... ... . .. ...
0 0 0 0 · · · No
2Ts
, (4.6)
e|R|é o determinante da matriz de covariância. As dimensões dos vetores médiam0em1são T
Ts ×1, idêntico as, eRé uma matriz T Ts ×
T Ts.
A detecção dos símbolos transmitidos consiste em escolher H1, se ps(s|H1)> ps(s|H0), ou
H0, seps(s|H1)< ps(s|H0); este é o critério de máxima verossimilhança, que pode ser descrito
da seguinte forma:
ps(s|H1)
H1 R H0
ps(s|H0). (4.7)
Na prática, é mais fácil trabalhar com a função densidade de probabilidade logarítimica [15,
16]. Portanto, aplicando a função logaritmo dos dois lados da equação acima e reorganizando os termos, temos:
(s−m1)TR−1(s−m1)−(s−m0)TR−1(s−m0)HR1
H0
0. (4.8)
Desenvolvendo (4.8), após algumas manipulações algébricas, obtemos a Equação (4.9) dada pela expressão seguinte, a qual pode ser confirmada utilizando o recurso das expressões simbólicas no MATLAB:
T Ts−1
X
k=0
sBI,1[n−k]
H1 R H0
0. (4.9)
Este é um resultado bastante interessante, pois sugere que, apesar do ruído ser colorido, a filtragem ótima é a média sobre todas as amostras de cada símbolo, e uma vez que o pulso de banda base é retangular, o filtro ótimo é claramente um filtro casado. Portanto, este filtro tem mesma resposta ao impulso do filtro modulador de pulso, usado no transmissor:
h[n] =gR(nTs) =gT(nTs), (4.10)
onde gT(t) é dado pela Equação (2.5). Este resultado leva a uma grande simplificação nas análises seguintes.
4.1.1 Análise de Desempenho
Uma vez escolhida a filtragem ótima, é possível calcular a relação sinal-ruído na saída do filtro. A componente em fase do sinal de saída do filtro casadosC[n]é:
sCI[n] = ∞
X
k=−∞
4.1. Projeto do Filtro Referente ao Primeiro Interpolador 23
ondeh[n]é a resposta ao impulso e pode ser modelada como:
h[n] = Ns
X
k=0
δ[n−k], (4.12)
Ns= TTs−1é o número de amostras do pulso retangular esBI,1[n]é o sinal de entrada no filtro
ótimo dado por (3.12). Substituindo (3.12) em (4.11),sCI[n]torna-se:
sCI[n] = ∞
X
k=−∞ ˆ
A[k]h[n−k] + ∞
X
k=−∞
v1[k]h[n−k]. (4.13)
A detecção de símbolo é realizada sobre a soma das amostras de cada pulso. Para efeito de simplificação, tomaremos essa soma apenas sobre o primeiro pulso recebido e amostraremos no instante final de tempo de duração do pulson=Ns. A expressão acima reduz-se a:
sCI[Ns] = Ns
X
k=0
ˆ
A[k]h[Ns−k] + Ns
X
k=0
v1[k]h[Ns−k] =M +N, (4.14)
ondeM refere-se ao primeiro termo, a soma sobre o sinal determinísticoAˆ[n], eN ao segundo termo, sobre o ruído. Agora, calcularemos a potência do ruído, a qual é igual à variância de
N:
σN2 =E{N2}= Ns X k=0 Ns X i=0
Rv1[k−i]h[Ns−k]h[Ns−i]. (4.15)
Substituindo (3.33) em (4.15), temos:
σ2
N =
No 2Ts
Ns X k=0 Ns X i=0
δ[k−i]h[Ns−k]h[Ns−i] +
No 4Ts
Ns X k=0 Ns X i=0
δ[k−i−1]h[Ns−k]h[Ns−i]
+No 4Ts
Ns X k=0 Ns X i=0
δ[k−i+ 1]h[Ns−k]h[Ns−i]. (4.16)
Observando os três termos que compõem a expressão acima da variância do ruído, concluímos que o primeiro somatório será não nulo apenas parak=i, o segundo parak−i= 1e terceiro para k−i = −1. Como modelamosh[n] com uma amplitude unitária, é fácil observar que a expressão acima reduz-se a:
σ2N =
No 2Ts
(T
Ts ) + No
4Ts (T
Ts
−1) + No
4Ts (T
Ts
−1). (4.17)
Reorganizando, a potência do ruído fica:
σ2N =
No 2Ts
(2T
Ts
−1). (4.18)
Neste caso particular, temos um grande número de amostras por pulso (T >> Ts), significando que T
Ts ≈ T
Ts −1. Portanto, simplificando, a variância reduz-se a:
σN2 =
No 2Ts
(2T
Ts
−1)≈NoT
T2
s
4.2. Projeto do Filtro Referente ao Segundo Interpolador 24
A taxa de erro de bits (em inglêsBit Error Rate(BER)) de um demoduladorBPSKé [8]:
BER=Q
s M2 σ2 N , (4.20)
onde M2 σ2
N é a relação sinal-ruído do sistema. Considerando que o primeiro símbolo transmitido foiao= 1e lembrando que a amplitude deAˆ[n]é igual a
q
Ts
T , o valor deM
2 é:
M2={
Ns
X
k=0
ˆ
A[k]h[Ns−k]}2={
r
Ts
T T Ts
}2= T
Ts
. (4.21)
Substituindo (4.19) e (4.21) na expressão anterior:
BER=Q
r Ts No
. (4.22)
A energia de bitEb do pulso demodulado é T2s, logo:
BER=Q
r
2Eb
No
, (4.23)
que é o resultado clássico para um demodulador BPSK em um canal com ruído branco (Additive White Gaussian Noise (AWGN)). A conclusão que podemos tirar desta análise é que, mesmo que o ruído seja colorido pelo interpolador, o desempenho do sistema continua tão boa quanto no caso onde o ruído é branco.
4.2 Projeto do Filtro Referente ao Segundo Interpolador
Utilizamos para o projeto deste filtro ótimo as mesmas definições e os mesmos procedimentos que foram usados no caso anterior, com exceção da matriz de covariância Rque agora está definida como:
R= No
4Ts 0 0 0 · · · 0
0 No
4Ts 0 0 · · · 0
0 0 No
4Ts 0 · · · 0
0 0 0 No
4Ts · · · 0
..
. ... ... ... . .. ...
0 0 0 0 · · · No
4Ts
= No 4Ts
I, (4.24)
ondeI é matriz identidade e verificamos queRagora é uma matriz diagonal, o que facilitará bastante nossa análise. Substituindo (4.24) em (4.8), obtemos:
(s−m1)T(s−m1)−(s−m0)T(s−m0)HR1 H0
0. (4.25)
Desenvolvendo a expressão acima, facilmente obteremos o mesmo resultado do caso anterior, a Equação (4.9) :
T Ts−1
X
k=0
sBI,2[n−k]
H1 R H0
0.
4.2. Projeto do Filtro Referente ao Segundo Interpolador 25
4.2.1 Análise de Desempenho
A análise de desempenho para esta nova estrutura do conversor é realizada de maneira idêntica ao caso anterior; a única mudança agora é a variância do ruído, uma vez que a segunda técnica de interpolação produz um processo aleatório com uma função de autocorrelação diferente da primeira. Portanto, a expressão para o cálculo da variância é:
σN2 =E{N2}= Ns X k=0 Ns X i=0
Rv2[k−i]h[Ns−k]h[Ns−i].
Desenvolvendo a expressão acima, substituindo (3.39) nela, temos:
σ2N =
No 4Ts
Ns X k=0 Ns X i=0
δ[k−i]h[Ns−k]h[Ns−i]. (4.26)
Assim como no primeiro termo da Equação (4.16), o somatório duplo somente será não-nulo parak =i. Considerando isto e que a amplitude de h[n]aqui também é unitária, facilmente chegamos ao valor da variância do ruído:
σ2N =
NoT 4T2
s
. (4.27)
O cálculo deM2 também segue o mesmo raciocínio do caso anterior, com a única diferença
que agora consideraremos apenas metade das amostras:
M2={
Ns−1
X
k=0
ˆ
A[k]h[Ns−k]}2={
r
Ts
T T
2Ts
}2= T
4Ts
, (4.28)
onde realizamos o somatório acima apenas para os valores pares dek. Substituindo (4.27) e (4.28) em (4.22), finalmente obtemos:
BER=Q
r Ts No =Q
r
2Eb
No
. (4.29)
Capítulo
5
Sincronismo de Símbolo
Começaremos a tratar agora do problema da sincronização de símbolo, também conhecido como sincronização de relógio. É comum na maioria dos sistemas de telecomunicações que a correção do sincronismo de fase e frequência seja realizada antes da de símbolo, porém neste trabalho, optamos por fazer este último primeiro.
As técnicas de recuperação da temporização podem dividir-se em dois grupos consoante o tipo de amostragem que usam: síncrona ou assíncrona. No primeiro grupo a amostragem está ligada ao sinal enviado e é comandada por umNCO; no segundo a amostragem não está solidária com os impulsos recebidos, é independente deles, e o relógio local está fixo. Em nosso caso, evidentemente, utilizamos amostragem assíncrona, que é a única que permite uma implementação completamente digital do temporizador e pode ser usada em esquemas de malha aberta ou malha fechada.
Uma outra forma de classificar as técnicas de sincronismo, tanto as de símbolo quanto as de fase e frequência, é quanto ao uso, por parte do sincronizador, de dados adicionais enviados pelo transmissor com a finalidade de auxiliar a tarefa da sincronização no receptor [6]. As técnicas de sincronismo que utilizam este artifício são denominadas pela literatura anglófona de técnicas Data-Aided (DA). Há também aquelas em que o receptor utiliza os próprios símbolos decididos, através de um esquema com realimentação, como auxílio no processo de sincronização, as quais são conhecidas como técnicasDecision-Directed (DD). E por fim, se não houver qualquer ajuda à sincronização são classificadas comoNon Data-Aided (NDA).
Neste trabalho utilizamos um método de sincronização assíncrono, de malha aberta e NDA, cujo esquema encontra-se mostrado na Figura 5.1. Pelo diagrama de blocos podemos claramente perceber que a recuperação da temporização se distingue em três operações distintas:
i. Medição da temporização, no Estimador, onde se obtém a estimativa ˆǫ da “fase de temporização”ǫ.
ii. Cálculo dos parâmetros(ln, µn), a partir da estimativa do atrasoˆǫ.
iii. Ajuste da temporização, no Corretor, composto pelo Interpolador e pelo Decimador, quando se aplicam os parâmetros (ln, µn) ao processo de obtenção das amostras para o decisor.
5.1. Estimador de Oerder&Meyr 27
Figura 5.1:Diagrama de blocos da estrutura recuperadora de sincronismo de símbolo.
trataremos de uma forma geral sobre a correção deste atraso. Após isto, aprofundaremos nos algoritmos para o cálculo dos parâmetros e na estrutura específica utilizada nestre trabalho para o ajuste da temporização dos símbolos. Finalizaremos o capítulo com a análise da variância da estimador.
5.1 Estimador de Oerder&Meyr
Este estimador é o equivalente digital da conhecida recuperação de temporização em tempo contínuo com lei quadrática [6]. O método é aplicado a um bloco de símbolos de tamanhoL, que origina um valor estimado de ǫ. Como vimos anteriormente, o sinal discreto sC[n] na entrada do estimador, pode ser descrito matematicamente da seguinte forma:
sC[n] =sB[n]∗h[n], (5.1)
onde aqui omitiremos o subscrito utilizado no capítulo anterior no sinalsB[n], uma vez que os dois interpoladores possuem desempenho semelhante, eh[n]é a resposta ao impulso do filtro casado. Conforme vimos anteriormente, podemos escrever o sinalsB[n]como:
sB[n] = ˆA[n]ej(ωdn+ϕ)+v[n]. (5.2) Para efeito de simplificação da notação, desprezaremos os efeitos do erro residual de frequência e do desvio de fase, uma vez que eles não influenciam no desempenho e do estimador de símbolo, e representaremos o sinal sB[n] apenas em função do sinal de banda base e do ruído:
sB[n] = ˆA[n] +v[n] = ∞
X
i=−∞
aigT(nTs−iT−ǫT) +v(nTs). (5.3)
Aqui lembramos que a resposta ao impulso do filtro casado relaciona-se com o pulso de banda base transmitido de acordo com a Equação (4.10):
h[n] =gR(nTs),
5.2. Correção da Temporização 28
Conforme dito no Capítulo 3, pela simetria da janela retangular, temos gR(t) = gT(t). Desenvolvendo a Equação (5.1), utilizando (5.3):
sC[n] = [ ∞
X
i=−∞
aigT(nTs−iT−ǫT) +v(nTs)]∗gT(nTs), (5.4)
sC[n] = ∞
X
i=−∞
aigT(nTs−iT −ǫT)∗gT(nTs) +v(nTs)∗gT(nTs), (5.5)
sC[n] = ∞
X
i=−∞
aig(nTs−iT −ǫT) + ˜v(nTs), (5.6)
onde g(t) = gT(t)∗gR(t), usamos aqui também a propriedade do deslocamento no tempo da operação de convolução, ev˜(t) =v(t)∗gT(t).
A Figura 5.2 ilustra o processamento realizado no estimador [17]. A primeira operação realizada é a elevação ao quadrado do módulo do sinalsC[n]. A aplicação desta não-linearidade ao sinal de entrada tem por finalidade gerar uma componente espectral na frequência ω =
2πTs T =
2π
Ns, ou seja, na mesma frequência da taxa de símbolos.
Figura 5.2:Diagrama de blocos da estrutura recuperadora de sincronismo de símbolo.
O sinalxn, após a aplicação da não-linearidade, fica:
xn=|sC[n]|2=|sC(nTs)|2=| ∞
X
i=−∞
aig(nT−iT−ǫT) + ˜v(nTs)|2. (5.7)
Após esse procedimento, devemos obter a componente espectral desejada calculando o coeficiente da Transformada de Fourier Discreta (do inglêsDiscrete Fourier Transform (DFT)) dexn na frequênciaω=N2πs para cada bloco de amostras de tamanhoLNs, ou seja, efetuando o cálculo do somatório da Transformada para cadaLsímbolos:
Xm=
(m+1)LNs+1
X
n=mLNs
xne −j2π
Nsn. (5.8)
Finalmente, do coeficiente Xm de cada vetor de L símbolos, é extraída a fase, a qual é a estimativa do atraso de simboloǫque desejávamos.
5.2 Correção da Temporização
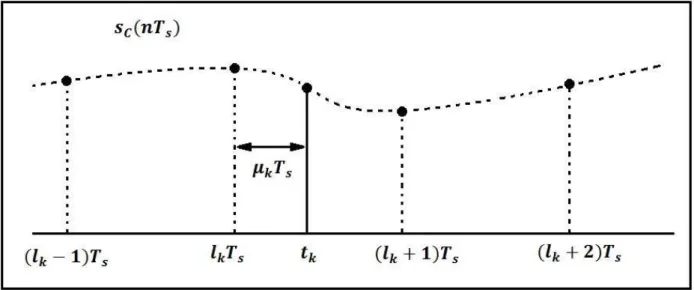
5.2. Correção da Temporização 29
Figura 5.3: Ilustração dos instantes de amostragem e interpolação.
são chamadas de interpolantes, e seus valores serão iguais aos valores que o sinalsC(t), sinal analógico correspondente asC[n], teria se amostrado neste novo padrão de amostragem.
O sinalsC(t)pode ser obtido a partir desC[n]através da seguinte expressão [11]:
sC(t) = ∞
X
n=−∞
sinc(t−nTs
Ts )sC(nTs), (5.9)
que é a conhecida expressao para a recuperação de um sinal analógico desde sua versão discreta. A função sinc, como sabemos, se estende de −∞a ∞ e portanto, torna-se pouco prática. Ao invés dela, é comum o uso de outros tipos de funções limitadas no tempo resultando em um somatório com um número finito de parcelas, fazendo aparecer um fator de erro à recuperação do sinal, uma vez que ela será realizada de forma imperfeita [11]. Reescrevendo a equação anterior:
sC(t) = ∞
X
n=−∞
hI(t−nTs)sC(nTs), (5.10)
e portanto nosso objetivo será encontrarhI. Entretanto, não nos interessa conhecer o sinal
sC(t)em qualquer instante de tempo t, mas somente nos novos instantes de amostragemtk, conforme ilustrado na Figura 5.3. Podemos observar que as amostras nos instantes(lk+p)Ts, onde p é um número inteiro qualquer, são aquelas relativas ao sinal sC[n] = sC(nTs). O instante de tempotk é definido como:
tk =lkTs+µkTs, (5.11)
onde:
lk =int(tk).
O númerolk é chamado de índice de ponto base e µk é chamado de intervalo fracionário, e ambos são obtidos a partir da estimativa do atraso de símbolo, como veremos mais à frente. Substituindo (5.11) em (5.10):
s′ C(tk) =
∞
X
n=−∞