UNIVERSIDADE DO ESTADO DE SANTA CATARINA - UDESC CENTRO DE CIÊNCIAS TECNOLÓGICAS - CCT
MESTRADO EM ENGENHARIA ELÉTRICA
EDUARDO HENRIQUE COUTO
IDENTIFICAÇÃO PARAMÉTRICA EM MALHA FECHADA DO MOTOR DE INDUÇÃO TRIFÁSICO USANDO O MÉTODO DOS
MÍNIMOS QUADRADOS
UNIVERSIDADE DO ESTADO DE SANTA CATARINA - UDESC CENTRO DE CIÊNCIAS TECNOLÓGICAS - CCT
MESTRADO EM ENGENHARIA ELÉTRICA
EDUARDO HENRIQUE COUTO
IDENTIFICAÇÃO PARAMÉTRICA EM MALHA FECHADA DO MOTOR DE INDUÇÃO TRIFÁSICO USANDO O MÉTODO DOS
MÍNIMOS QUADRADOS
Dissertação submetida ao Programa de Pós-Graduação em Engenharia Elétrica do Centro de Ciências Tec-nológicas da Universidade do Es-tado de Santa Catarina, para a ob-tenção do grau de Mestre em Enge-nharia Elétrica.
Orientador:
Prof. Dr. José de Oliveira Coorientador:
Prof. Dr. Ademir Nied
todo dos mínimos quadrados/ Eduardo Henrique Couto. – Joinville, 2013. 141 p. : il. ; 21 cm
Orientador: José de Oliveira Bibliografia: p. 131-134
Dissertação (mestrado) – Universidade do Estado de Santa Catarina, Centro de Ciências Tecnológicas, Programa de Pós-Graduação em Engenharia Elétrica, Joinville, 2013. 1. Motor de Indução Trifásico. 2. Identificação Paramétrica. I. Oliveira. José de. II. Universi-dade do Estado de Santa Catarina. III. Programa de Pós-Graduação em Engenharia Elétrica. IV. Título
IDENTIFICAÇÃO PARAMÉTRICA EM MALHA FECHADA DO MOTOR DE INDUÇÃO TRIFÁSICO USANDO O MÉTODO DOS
MÍNIMOS QUADRADOS
por
EDUARDO HENRIQUE COUTO
Esta dissertação foi julgada adequada para a obtenção do título de
MESTRE EM ENGENHARIA ELÉTRICA
área de de concentração em "Sistemas Eletroeletrônicos",
e aprovada em sua forma final pelo
CURSO DE MESTRADO ACADÊMICO EM ENGENHARIA ELÉTRICA
DO CENTRO DE CIÊNCIAS TECNOLÓGICAS DA UNIVERSIDADE DO
ESTADO DE SANTA CATARINA.
Banca Examinadora:
Joinville,
06 de Dezembro de
2013:
Prof. Dr. José de Oliveira
Orientador
Prof. Dr. Ademir Nied
Coorientador
Prof. Dr.
Convidado 2
Professor
Convidado 3
Professor
AGRADECIMENTOS
Em primeiro lugar, gostaria de agradecer aos meus pais, Paulo Fernando Couto e Valdette Regina Gardelin Couto, aos meus irmãos Vic-tor Fernando Couto e Francis Rogério Couto, e à minha namorada Patrícia de Oliveira pela compreensão de minha ausência em alguns momentos, pela atenção dada e, acima de tudo, pelo amor sempre confortante e in-condicional.
Gostaria, imensamente, de agradecer ao meu orientador Prof. Dr. José de Oliveira e ao coorientador Prof. Dr. Ademir Nied, pelos en-sinamentos e experiências transmitidas e da dedicação mantida durante todo o mestrado.
Gostaria de agradecer também aos meus colegas de laboratório, em especial à Anna Karolina de Souza Baasch, Jacson Luis de Oliveira e Eduardo Bonci Cavalca pelos momentos juntos, pelos auxílios sempre pertinentes, pelo ambiente amistoso e pela descontração em momentos mais difíceis.
Agradeço aos demais professores e alunos de mestrado e gra-duação que, de alguma forma contribuíram para que o trabalho se con-cretizasse de maneira satisfatória.
RESUMO
COUTO, Eduardo Henrique. Identificação paramétrica em malha fechada do motor de indução trifásico usando o método de mí-nimos quadrados. 2013. 135f. Dissertação (Mestrado Acadêmico em Engenharia Elétrica – Área: Sistemas Eletroeletrônicos) – Universi-dade do Estado de Santa Catarina, Programa de Pós-Graduação em Engenharia Elétrica, Joinville, 2013.
Quando o motor de indução trifásico é acionado em malha de controle vetorial, é considerado o modelo matemático como um conjunto de equações lineares, por isso o controle é mais efetivo so-mente sobre este ponto de operação. Entretanto, quando se muda esse ponto, o controle pode passar a não responder mais adequa-damente, causando erros indesejáveis de velocidade, posição e até mesmo a instabilidade. Tais fatos ocorrem devido à descasamentos entre o comportamento real do motor, que é não linear e variante no tempo, e o modelo matemático utilizado para o projeto. Dentro de tal contexto, as técnicas de identificação paramétrica permitem que os parâmetros do motor sejam determinados de formaonline, monitorando sua variação no tempo. O foco principal deste trabalho é apresentar um cenário geral do assunto e mostrar os resultados obtidos usando as técnicas de identificação paramétrica, mais es-pecificamente explorando o método dos mínimos quadrados para ajustar os parâmetros do motor em malha fechada.
ABSTRACT
COUTO, Eduardo Henrique. Parameter identification in clo-sed loop of three-phase induction motor using the least squares me-thod. 2013. 135f. Dissertation (Master in Electrical Engineering – Area: Eletro-eletronic Systems) – State University of Santa Catarina, Graduate Program in Electrical Engineering, Joinville (Brazil), 2013.
When the three phase induction motor is vector-controlled driven, is considered the mathematical model as a set of linear equa-tions, so that the control is more effective only over an operation point. However, when changing that point, control can pass to not re-spond properly, causing unwanted errors of speed, position or even instability. Such behavior are due to mismatch of the real behavior of the motor, which is non-linear and time-varying system, and the mathematical model used in the project. Thus, parametric identifi-cation techniques allow the motor parameters to be determined on-line, tracking its time variation. The focus of the thesis is to present a general background of the subject and show the results obtained using techniques of parametric identification, more specifically ex-ploring the least squares method to fit the parameters of the motor in closed loop.
LISTA DE FIGURAS
Figura 2.1 –Representação fasorial da máquina trifásica. . . 42
Figura 3.1 –Representação espacial do controle vetorial. . . 60 Figura 3.2 –Ação de controle para impor as correntes𝑖𝑠
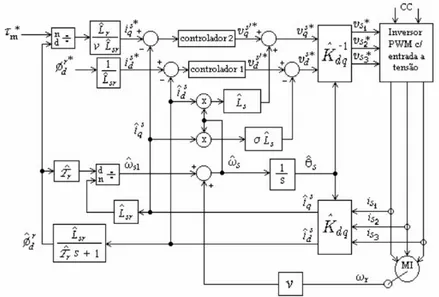
𝑑e𝑖𝑠𝑞. . . 67 Figura 3.3 –Diagrama de blocos do controlador vetorial indireto com
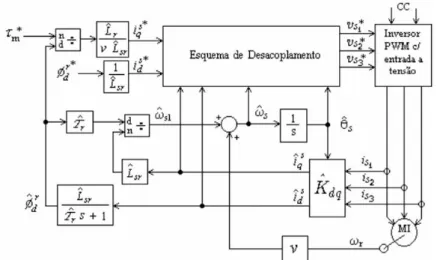
inversor a entrada em tensão. . . 68 Figura 3.4 –Esquema simplificado do controlador vetorial indireto
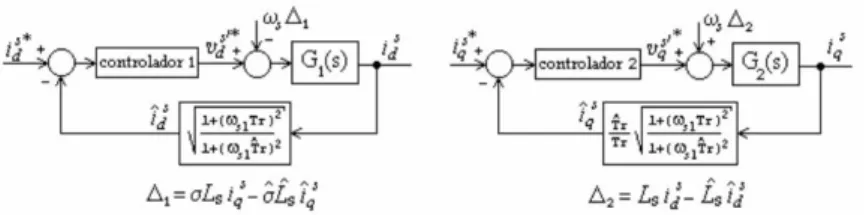
com inversor a entrada em tensão. . . 69 Figura 3.5 –Malha de controle das correntes, considerando-se as
distorções no desacoplamento. . . 70
Figura 4.1 –Comparativo da determinação dos parâmetros da reta com solução única. . . 73
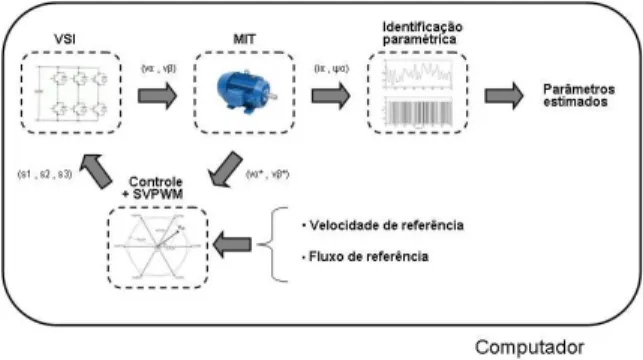
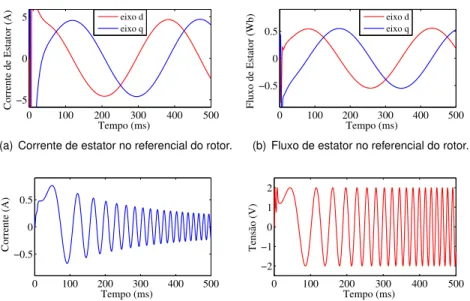
Figura 5.1 –Diagrama da rotina do algoritmo de simulação do MIT. . 98 Figura 5.2 –Variáveis do motor em malha fechada utilizadas na
iden-tificação paramétrica . . . 104 Figura 5.3 –Estimação de 𝑅𝑠e𝐿𝑠à usando o estimador em
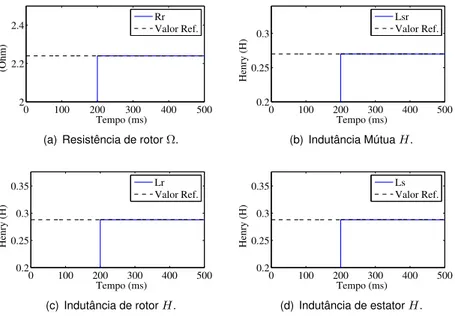
bate-lada com o modelo homopolar . . . 104 Figura 5.4 –Identificação de𝑅𝑟,𝐿𝑠,𝐿𝑟e𝐿𝑠𝑟usando o modelo
ho-mopolar com o estimadorbatch . . . 105 Figura 5.5 –Estimação de 𝑅𝑠e𝐿𝑠à usando o método RLS com o
modelo homopolar . . . 106 Figura 5.6 –A estimação de𝑅𝑟,𝐿𝑠,𝐿𝑟 e𝐿𝑠𝑟 usando o estimador
RLS com o modelo homopolar . . . 106 Figura 5.7 –A identificação de𝑅𝑟,𝐿𝑠,𝐿𝑟e𝐿𝑠𝑟usando método em
batelada com o modelo de classe de motores . . . 107 Figura 5.8 –A estimação de𝑅𝑟,𝐿𝑠,𝐿𝑟e𝐿𝑠𝑟pelo método de
esti-mação RLS usando o modelo de classe de motores . . 108
Figura 6.3 –Placa de Controle HPE - UPCC2812 . . . 111
Figura 6.4 –Estimação da resistência de estator através do método de injeção de corrente C.C:𝑅𝑠= (CH4:1,0Ω/𝑉) . . . . 113 Figura 6.5 –Variáveis utilizadas na identificação dos parâmetros do
MIT em malha aberta. . . 114
Figura 6.6 –Estimação dos coeficientes discretos e contínuos do modelo do motor usando o método em batelada com acionamento em malha aberta. . . 115
Figura 6.7 –Estimação dos parâmetros do motor pelo método batch em malha aberta:𝐿𝑠=(CH1:0,10𝐻/V),𝐿𝑟=(CH2:0,10𝐻/V),
𝐿𝑠𝑟=(CH3:0,10𝐻/V),𝑅𝑟=(CH4:1,0Ω/V) . . . 116 Figura 6.8 –Estimação dos coeficientes contínuos do modelo do
motor pelo método RLS com acionamento em malha aberta: Pólo discreto (𝑓ˆ): (CH1), (𝑏0ˆ): (CH2) e (𝑏1ˆ): (CH3)117 Figura 6.9 –Estimação dos parâmetros do motor pelo método RLS
com acionamento em malha fechada:𝐿𝑠=(CH1:0,10𝐻/V),
𝐿𝑟=(CH2: 0,10𝐻/V), 𝐿𝑠𝑟=(CH3: 0,10𝐻/V),𝑅𝑟=(CH4:
1,0Ω/𝑉) . . . 118 Figura 6.10 –Fluxo rotórico e Velocidade do rotor:ã𝑟
𝑑= (CH1:0,0875𝑊 𝑏/𝑉),
ã𝑟
𝑞= (CH2:0,0875𝑊 𝑏/𝑉),æ𝑟=(CH3:180𝑟𝑝𝑚/𝑉) eæ𝑟𝑒𝑓 = (CH4:180𝑟𝑝𝑚/𝑉). . . 119 Figura 6.11 –Variáveis utilizadas na identificação dos parâmetros do
motor: Fluxo de Estator: (CH1 e CH2:0,08753𝑊 𝑏/𝑉) Corrente de estator: (CH3 e CH4:0,7𝐴/𝑉). . . 119 Figura 6.12 –Estimação dos coeficientes discretos e contínuos do
modelo do motor usando o método em batelada com acionamento em malha fechada. . . 120
Figura 6.13 –Estimação dos parâmetros do motor pelo método batch em malha fechada:𝐿𝑠=(CH1:0,10𝐻/V),𝐿𝑟=(CH2:0,10𝐻/V),
Figura 6.14 –Estimação dos coeficientes contínuos do modelo do motor pelo método RLS com acionamento em malha aberta: Pólo discreto (𝑓ˆ): (CH1), (𝑏0ˆ): (CH2) e (𝑏1ˆ): (CH3)121 Figura 6.15 –Estimação dos parâmetros do motor pelo método RLS
com acionamento em malha fechada:𝐿𝑠=(CH1:0,10𝐻/V),
𝐿𝑟=(CH2: 0,10𝐻/V), 𝐿𝑠𝑟=(CH3: 0,10𝐻/V), 𝑅𝑟=(CH4:
1,0Ω/𝑉) . . . 122
Figura 7.1 –Plataforma de Ensaios . . . 125
LISTA DE TABELAS
Tabela 4.1 –Dados para estimação dos parâmetros da reta . . . 72
Tabela 4.2 –Erro de estimação dos parâmetros da reta . . . 74
Tabela 5.1 –Parâmetros do motor de indução trifásico . . . 98
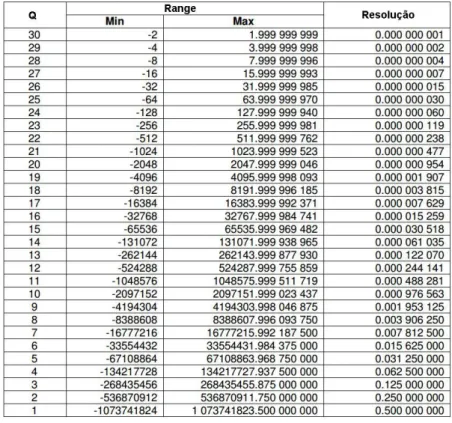
Tabela 5.2 –Representações de números inteiros. . . 100
LISTA DE ABREVIATURAS E SIGLAS
ARMA Autoregressive Moving Average
ARMAX Autoregressive Moving Average withExogenous Inputs
ARX Autoregressive with Exogenous Inputs
CC Corrente Contínua
DFOC Direct Field Oriented Control
DSP Digital Signal Processor
FOC Field Oritented Control
FT Função Transferência
IFOC Indirect Field Oriented Control
MIT Motor de Indução Trifásico
MQ Mínimos Quadrados
MQR Mínimos Quadrados Recursivo
PWM Pulse Width Modulation
SVPWM Space Vector Pulse Width Modulation
LISTA DE SÍMBOLOS
Ý Erro da previsão de saído do estimador MQ
Ü(𝑡) Representação discreta de um ruído branco
æ𝑟 Velocidade angular mecânica do rotor
æ𝑠 Velocidade angular elétrica do motor
æ𝑠𝑙 Frequência de escorregamento
â Número de pares de polo
Φr Vetor de fluxo enlaçado com os enrolamentos de rotor
Φs Vetor de fluxo enlaçado com os enrolamentos de
esta-tor
Φ𝑟
Ð Fluxo de rotor de eixo direto no referencial estacionário
Φ𝑟
Ñ Fluxo de rotor de eixo em quadratura no referencial es-tacionário
Φr
ÐÑ Vetor de fluxo de rotor no referencial estacionário
Φ𝑠
Ð Fluxo de estator de eixo direto no referencial estacioná-rio
Φ𝑠
Ñ Fluxo de estator de eixo em quadratura no referencial estacionário
Φs
ÐÑ Vetor de fluxo de estator no referencial estacionário
Φ𝑟
𝑑 Fluxo de rotor de eixo direto no referencial girante
Φ𝑟
Φ𝑠
𝑑 Fluxo de estator de eixo direto no referencial girante
Φ𝑠
𝑞 Fluxo de estator de eixo em quadratura no referencial girante
Φs
dq Vetor de fluxo de estator no referencial girante
á𝑐 Conjugado de carga
á𝑚 Conjugado eletromagnético
á𝑟 Constante de tempo rotórica
𝜃𝑟 Posição angular do rotor
æ𝑠 Velocidade síncrona do campo girante
æ𝑟 Velocidade mecânica do rotor
𝑎 Polo do modelo contínuo
ˆ
𝑎 Polo estimado do modelo contínuo
𝑏 Coeficiente de atrito viscoso
𝑏0 Zero do modelo discreto ˆ
𝑏0 Zero estimado do modelo discreto
𝑏1 Zero do modelo discreto
ˆ
𝑏1 Zero estimado do modelo discreto
𝑑0 Zero do modelo contínuo
ˆ
𝑑0 Zero estimado do modelo contínuo
𝑑1 Zero do modelo contínuo ˆ
Ir Vetor de corrente de rotor
Is Vetor de corrente de estator
𝑖𝑟
Ð Corrente de rotor de eixo direto no referencial estacio-nário
𝑖𝑟
Ñ Corrente de rotor de eixo em quadratura no referencial estacionário
Ir
ÐÑ Vetor de corrente de rotor no referencial estacionário
𝑖𝑠
Ð Corrente de estator de eixo direto no referencial estaci-onário
𝑖𝑠
Ñ Corrente de estator de eixo em quadratura no referen-cial estacionário
Is
ÐÑ Vetor de corrente de estator no referencial estacionário
𝑖𝑟
𝑑 Corrente de rotor de eixo direto no referencial girante
𝑖𝑟
𝑞 Corrente de rotor de eixo em quadratura no referencial girante
Ir
dq Vetor de corrente de rotor no referencial girante
𝑖𝑠
𝑑 Corrente de estator de eixo direto no referencial girante
𝑖𝑠
𝑞 Corrente de estator de eixo em quadratura no referen-cial girante
Is
dq Vetor de corrente de estator no referencial girante
𝐽 Coeficiente de inércia do conjunto rotor
𝐾 Velocidade angular elétrica do motor
𝐾(𝑡) Ganho do estimador recursivo no instante passado
𝐿123
𝑟2 Indutância própria do rotor ao enrolamento 2
𝐿123
𝑟3 Indutância própria do rotor ao enrolamento 3
𝐿123
𝑟 Indutância própria de rotor por fase
𝐿𝑟 Indutância própria de rotor
𝐿𝑟𝑟 Matriz de indutâncias de rotor
𝐿123
𝑠1 Indutância própria do estator ao enrolamento 1
𝐿123
𝑠2 Indutância própria do estator ao enrolamento 2
𝐿123
𝑠3 Indutância própria do estator ao enrolamento 3
𝐿123
𝑠 Indutância própria do estator por fase
𝐿𝑠 Indutância própria de estator
𝐿𝑠𝑠 Matriz de indutâncias de estator
𝐿𝑠𝑟 Indutância mútua equivalente
𝑀𝑟12 Indutância mútua entre os enrolamentos 1 e 2 de rotor 𝑀𝑟13 Indutância mútua entre os enrolamentos 1 e 3 de rotor
𝑀𝑟23 Indutância mútua entre os enrolamentos 2 e 3 de rotor
𝑀𝑟 Indutância mútua entre duas fases de rotor
𝑀𝑠12 Indutância mútua entre os enrolamentos 1 e 2 de
esta-tor
𝑀𝑠13 Indutância mútua entre os enrolamentos 1 e 3 de
esta-tor
𝑀𝑠23 Indutância mútua entre os enrolamentos 2 e 3 de
𝑀𝑠 Indutância mútua entre duas fases de estator
𝑀𝑠𝑟 Matriz de indutâncias mútuas estator-rotor
𝑃(𝑡) Matriz de Covariância do estimador de mínimos qua-drados recursivo
P(𝑡) Matriz Auxiliar para o cálculo do estimador em batelada
𝑃𝑚 Potência mecânica
Pt Potência total absorvida da rede
Q(𝑡) Matriz Auxiliar para o cálculo do estimador em batelada
𝑅𝑟1 Resistência de rotor da fase 1
𝑅𝑟2 Resistência de rotor da fase 2
𝑅𝑟3 Resistência de rotor da fase 3
𝑅𝑟 Resistência de rotor por fase
Rr Matriz de resistência de rotor
𝑅𝑠1 Resistência de estator da fase 1
𝑅𝑠2 Resistência de estator da fase 2
𝑅𝑠3 Resistência de estator da fase 3
𝑅𝑠 Resistência de estator por fase
Rs Matriz de resistência de estator
𝑇 Período de amostragem
Vr Vetor de tensão de rotor
Vs Vetor de tensão de estator
𝑉𝑟
Vr
ÐÑ Vetor de tensão de rotor no referencial estacionário
𝑉𝑠
Ð Tensão de estator de eixo direto no referencial estacio-nário
𝑉𝑠
Ñ Tensão de estator de eixo em quadratura no referencial estacionário
Vs
ÐÑ Vetor de tensão de estator no referencial estacionário
𝑉𝑟
𝑑 Tensão de rotor de eixo direto no referencial girante
𝑉𝑟
𝑞 Tensão de rotor de eixo em quadratura no referencial girante
Vr
dq Vetor de tensão de rotor no referencial girante
𝑉𝑠
𝑑 Tensão de estator de eixo direto no referencial estacio-nário
𝑉𝑠
𝑞 Tensão de estator de eixo em quadratura no referencial girante
Vs
dq Vetor de tensão de estator no referencial girante
X Vetor de regressores
𝑥(𝑡) representação discreta da entrada em sistemas dinâ-micos
𝑊 Energia armazenada no campo magnético
SUMÁRIO
1 INTRODUÇÃO . . . 33
1.1 MOTOR DE INDUÇÃO CONTROLADO . . . 34 1.2 ROTEIRO DO TRABALHO . . . 37
2 MODELAGEM DO MOTOR DE INDUÇÃO TRIFÁSICO . . . 39
2.1 INTRODUÇÃO . . . 39 2.2 MODELO TRIFÁSICO . . . 41 2.3 MODELO BIFÁSICO . . . 47
2.3.1 Representação no Espaço de Estados pelas Cor-rentes e Fluxos Estatóricos . . . 53 2.3.2 Modelo no Sistema de Coordenadas Síncrono ao
Campo Girante . . . 56
3 CONTROLE VETORIAL DO MOTOR DE INDUÇÃO TRIFÁSICO E O ESTUDO DA INFLUÊNCIA DOS PARÂMETROS . . . 59
3.1 INTRODUÇÃO . . . 59 3.2 PRINCÍPIOS DO CONTROLE VETORIAL . . . 61 3.3 ANÁLISE DAS DISTORÇÕES . . . 63 3.3.1 Análise de Distorção de Fase . . . 63 3.3.2 Análise da Distorção no Controle de Conjugado . . 64 3.3.3 Análise da Distorção do Fluxo de Rotor . . . 65 3.4 CONTROLE VETORIAL INDIRETO COM INVERSOR A
ENTRADA EM TENSÃO . . . 66 3.5 ANÁLISE DAS DISTORÇÕES NO DESACOPLAMENTO . 68
4 IDENTIFICAÇÃO PARAMÉTRICA PELO MÉTODO DOS MÍNI-MOS QUADRADOS . . . 71
4.3.3 Modelo de Erro na Saída . . . 76 4.4 REGRESSÃO LINEAR DE SISTEMAS
SOBREDETERMI-NADOS . . . 76 4.5 MÉTODO DE MÍNIMOS QUADRADOS . . . 78 4.5.1 Propriedade dos Estimadores MQ . . . 82 4.6 ESTIMADOR DE MÍNIMOS QUADRADOS RECURSIVO . 83 4.6.1 Fator de Esquecimento . . . 86 4.7 APLICAÇÃO DOS ESTIMADORES MQ NOS MOTORES
DE INDUÇÃO . . . 87 4.7.1 Discretização de Sistemas Contínuos . . . 89 4.7.2 Aplicação da Discretização em uma Planta Contínua 90 4.7.3 Identificação dos Parâmetros do Motor pelo
Mo-delo Homopolar . . . 91 4.7.3.1 Estimação de𝑅𝑠e𝐿𝑠à . . . 92 4.7.3.2 Estimação de𝐿𝑟à,𝐿𝑠𝑟e𝑅𝑟 . . . 92 4.7.4 Identificação do Motor de Indução Através do
Con-ceito de Classe de Motores . . . 93 4.7.4.1 Estimação de𝑅𝑠. . . 95
5 RESULTADOS DE SIMULAÇÃO . . . 97
5.1 PROCESSADOR DE PONTO FIXO . . . 99 5.2 RESULTADOS . . . 103
5.2.1 Identificação pelo Modelo Homopolar Usando o Es-timadorBatch . . . 103 5.2.2 Identificação pelo Modelo Homopolar Usando o
Es-timador Recursivo . . . 105 5.2.3 Identificação pelo Modelo de Classe de Motores
Usando o EstimadorBatch. . . 107 5.2.4 Identificação pelo Modelo de Classe de Motores
Usando o Estimador Recursivo . . . 107
6.1 PLATAFORMA DE ENSAIOS . . . 109 6.2 RESULTADOS . . . 112 6.2.1 Resultados em Malha Aberta . . . 114 6.2.1.1 Estimador em Batelada . . . 115 6.2.1.2 Estimador Recursivo . . . 116 6.2.2 Resultados em Malha Fechada . . . 118 6.2.2.1 Estimador em Batelada . . . 120 6.2.2.2 Estimador Recursivo . . . 120
7 CONSIDERAÇÕES FINAIS . . . 123
7.1 PROPOSTAS PARA TRABALHOS FUTUROS . . . 126
REFERÊNCIAS BIBLIOGRÁFICAS . . . 129
Anexos 133
ANEXO A TRANSFORMAÇÃO DE COORDENADAS . . . 135
A.1 TRANSFORMAÇÃO GERAL TRIFÁSICO-BIFÁSICO . . . . 135 A.1.1 Modelo no Sistema de Coordenadas Estacionáio . 137 A.1.2 Modelo no Sistema de Coordenadas Síncrono ao
Campo Girante . . . 139 A.1.2.1 Sistema de Coordenadas Síncrona ao Campo
Girante . . . 139 A.1.2.2 Sistema de Coordenadas que Gira com
o Rotor . . . 140
33
1 INTRODUÇÃO
A primeira máquina elétrica conhecida foi construída em 1663, pelo alemão Otto Von Guericke, inventor da máquina eletrostática, que transformava energia mecânica em energia elétrica. Mas foi com os ex-perimentos de Oersted e Ampère, em 1820, que realmente foi dado o pri-meiro grande passo para o surgimento do motor elétrico. Oersted obser-vou o deslocamento de uma agulha imantada ao aproximá-la e afastá-la de um condutor carregado. Com base nessas observações, ele concluiu que há uma influência da eletricidade no magnetismo. No ano seguinte, em 1821, Ampère complementou essa fundamentação apresentando a lei que relaciona a orientação do campo magnético com o sentido da cor-rente (WIKIPEDIA, 2013).
Inspirados pelas descobertas de Oersted e Ampère, William Stur-geon e Michael Faraday foram os responsáveis pelos últimos passos rumo à construção do motor elétrico. Sturgeon, em 1825, inventou o ele-troímã, fundamental na construção de máquinas elétricas girantes. E em 1831, Faraday descobriu a indução eletromagnética, provando a argu-mentação de Tales de Mileto que, há quase dois mil anos antes, havia relatado que ao se atritar o âmbar com um pano, este adquiria proprieda-des de atrair pequenos pedaços de tecido, pelos, etc (WEG, 2013).
Siemens possuía uma potência de aproximadamente 30 Watts e uma ro-tação de 1200rpm. Este não funcionava somente como um gerador de eletricidade, mas também podia operar como um motor, desde que se aplicasse aos seus bornes uma corrente contínua.
Cerca de 3 anos após a criação de Siemens, o engenheiro ele-trotécnico Dobrowolsky, da firma AEG, de Berlim, entrou com o pedido de patente de um motor trifásico com rotor de gaiola. O motor apresen-tado tinha uma potência de 80 Watts, um rendimento aproximado de 80% em relação a potência consumida e um excelente conjugado de partida. As vantagens do motor de corrente alternada para o motor de corrente contínua eram marcantes: construção mais simples, silencioso, menos manutenção e alta segurança em operação. Dobrowolsky desenvolveu, em 1891, a primeira fabricação em série de motores assíncronos, nas potências de 0,4 a 7,5 KW (WEG, 2013).
Após já sedimentado boa parte da tecnologia dos motores elé-tricos, a impulsão de seu uso nas indústrias ocorreu após a chamada segunda revolução industrial1que durou até meados da década de 1940, Com isso as indústrias passaram cada vez mais a buscar a automatiza-ção de seus processos, e mesmo com as evidentes vantagens do mo-tor de indução trifásico (MIT) em relação ao momo-tor de corrente contínua (Motor CC), este acabou tendo, durante muito tempo, uma posição de destaque na indústria devido a sua facilidade de controle de posição e velocidade.
1.1 MOTOR DE INDUÇÃO CONTROLADO
Com o avanço dos processos de automação, tem-se exigido cada vez mais desempenho dinâmico dos motores elétricos controlados. Até meados da década de oitenta, o motor CC era quase que exclusivamente utilizado para esse propósito devido ao seu desacoplamento natural das suas componentes de fluxo (estabelecido pela corrente de campo) e de
1.1. MOTOR DE INDUÇÃO CONTROLADO 35
conjugado (estabelecido pela corrente de armadura), o que torna seu con-trole um projeto relativamente simples (ZIPF, 2001).
Em contrapartida, motores de indução são mais baratos, mais robustos, possuem menor custo de manutenção em função de não utili-zarem comutadores e escovas de carvão em sua estrutura e apresentam maior relação potência-peso. Entretanto, o controle desse tipo de má-quina se torna muito mais complexo devido ao fato de ser uma planta altamente não linear, fortemente acoplada e multivariável, demandando tecnologias indisponíveis na época (FERRARI, 2005).
Em função da evolução tecnológica causada pelos microcontro-ladores, e atualmente, com os processadores Digitais de Sinais (DSP2), a implementação de algoritmos mais sofisticados de controle puderam ser realizados. Aliado a isso, o surgimento de novas tecnologias na área da eletrônica de potência, tem propiciado uma demanda crescente na utili-zação de motores de indução com controles avançados.
Em um primeiro momento, o controle de velocidade do motor de indução foi realizado com o uso da técnica de controle escalar. Assim, foi possível controlar a velocidade do motor a partir da frequência elé-trica, procurando manter constante a relação tensão/frequência. Porém, de acordo com Ferrari (2005), o desempenho dinâmico deste tipo de con-trole não é satisfatório, e muitas vezes fica abaixo do desempenho atin-gido pelos motores CC.
A teoria do controle vetorial, surgida no início dos anos setenta com os trabalhos de Hasse (1969) e Blaschke (1974), introduziu a base teórica para a operação do motor de indução com desempenho seme-lhante ao motor CC, uma vez que este tipo de controle também visa o de-sacoplamento das componentes de fluxo e conjugado no motor de indu-ção, e tem tido bons resultados. O avanço destas tecnologias deu origem ao desenvolvimento de técnicas não lineares de controle, podendo-se ci-tar os métodos baseados em geometria não-linear, que visam a
zação dos sistemas através de realimentação, e o controle baseado na teoria por modos deslizantes (LEONARD, 1996; BOSE, 1997).
Essas técnicas de controle modernas procuram atender desem-penhos dinâmicos cada vez mais exigentes. Mas a sua realização pres-supõe a utilização de observadores e controladores, os quais requerem o conhecimento prévio dos parâmetros elétricos do motor. Além disso, a precisão dos controles calculados a partir dos dados de placa, não é suficiente para a maioria das aplicações. Por isso, têm sido problemático combinar um inversor de um fabricante com o motor de indução de outro (BüNTE; H.GROTSTOLLEN, 1993).
Os métodos de identificação paramétrica buscam eliminar os pro-blemas causados pelos erros de declaração dos parâmetros do motor em algoritmos de controle vetorial. Existem várias técnicas de estimação pre-sentes na literatura Bünte e H.Grotstollen (1993), Coirault, Trigeassou, K’erignard e gaubert (1996), Kwon, Lee, Moon, Kwon e Choi (2009), Cor-tajanera, Marcos, Alvarez e Vicandi (2010). Neste trabalho, serão apre-sentados métodos baseados no estimador via mínimos quadrados e suas variações no intuito de estimar os parâmetros do motor, para que seja possível em um segundo momento, aprimorar a dinâmica de controle.
O trabalho foi baseado nos estudos desenvolvidos por Ferrari (2005). Porém, a identificação foi estendida à uma plataforma diferente, contendo apenas umDSPtrabalhando a uma frequência de amostragem de5𝑘𝐻𝑧. Além disso, Em função da implementação do controle vetorial indireto nas rotinas de acionamento, o sistema pôde ser identificado, tam-bém em malha fechada.
1.2. ROTEIRO DO TRABALHO 37
1.2 ROTEIRO DO TRABALHO
O presente trabalho foi dividido em 7 capítulos, de forma a dis-tribuir igualmente cada passo do processo e para melhor avaliação das dificuldades encontradas.
No Capítulo 2 são apresentadas as considerações iniciais da mo-delagem do motor. O objetivo principal deste capítulo é obter um modelo linear aproximado do motor para a realização dos primeiros procedimen-tos de simulação. Serão avaliadas também as principais relações do mo-tor que serão úteis na formulação do controle vemo-torial e análises de in-fluência dos parâmetros elétricos no motor, tanto em malha aberta quanto em malha fechada.
No Capítulo 3 será abordado o contexto geral do controle veto-rial, principais expressões e suas formas de implementação. Em seguida, com as relações de controle, serão avaliadas a dependência dos parâme-tros nas relações do controle vetorial e a influência deles na dinâmica da máquina nestas condições.
No Capítulo 4, primeiramente será feito uma introdução à repre-sentação de modelos discretos, em seguida serão deduzidos os princi-pais métodos de mínimos quadrados, o método em batelada (Batch) e o método recursivo. Será também tratada a modelagem do método de dis-cretização de Tustin, que será parte imprescindível para a identificação dos parâmetros do motor.
No Capítulo 5 serão apresentados os resultados de simulação obtidos e todos os processos que foram desenvolvidos nessa fase do trabalho. Entre eles pode-se citar o estudo feito para compreensão do funcionamento do processador de ponto fixo que foi utilizado no decorrer do processo de obtenção dos resultados experimentais. Será apresen-tado também, a forma de como foram implemenapresen-tados os hardwares de controle e potência na simulação.
ex-perimentais obtidos na plataforma desenvolvida no laboratório, bem como todos os procedimentos inerentes ao processo de aquisição dos resulta-dos.
Por fim, no Capítulo 7, são apresentadas as conclusões. Adicio-nalmente, tratar-se-á também das propostas e recomendações para tra-balhos futuros.
39
2 MODELAGEM DO MOTOR DE INDUÇÃO TRIFÁSICO
Neste capítulo são apresentadas a modelagem do motor de in-dução trifásico, e obtidas algumas relações importantes para análise da função de cada parâmetro dentro do motor de indução e do controle. Em seguida, será realizado uma transformação no modelo trifásico para um modelo bifásico equivalente na forma de equações de estados. Será tra-tado também a modelagem e as principais equações para a implementa-ção do controle vetorial indireto com orientaimplementa-ção pelo fluxo de rotor.
2.1 INTRODUÇÃO
Durante muitos anos, o motor de corrente contínua (Motor CC) foi a principal ferramenta em acionamentos controlados de velocidade e posição, devido à sua facilidade de implementação. Porém, algumas van-tagens do motor de indução o colocaram gradativamente como a melhor opção para este tipo de controle. Os principais pontos positivos são:
• O custo do Motor de Indução Trifásico (MIT) é muito menor em
re-lação ao motor CC de mesma potência
• O MIT atinge maiores velocidades, obtendo-se consequentemente
maiores potências
• A manutenção do MIT é muito mais simples, devido a inexistência
de escovas1
• Menor consumo em processos de aceleração e frenagem
O MIT é uma máquina rotativa cilíndrica, composta pelo estator, parte fixa, e pelo rotor, parte móvel. O estator possui enrolamentos dis-tribuídos uniformemente ao longo de sua estrutura e em alguns casos
possui acesso aos seis terminais2, podendo ser conectado em estrela ou triângulo, dependendo da utilização e da tensão de rede disponível no local. O rotor pode ser bobinado, ou seja, seus enrolamentos são distri-buídos ao longo do eixo do rotor e suas extremidades são conectadas aos anéis coletores deslizantes feitos de carbono, que permitem o contato elé-trico com o meio externo. São utilizados em aplicações que exigem altas velocidades e necessitam de alto conjugado de partida. O rotor também pode se apresentar de uma forma especial chamada rotor gaiola de es-quilo3. Neste caso, este é feito através de barras de alumínio injetadas em ranhuras e curto-circuitadas em suas extremidades com o mesmo mate-rial. Não há necessidade de nenhuma isolação especial e os terminais de rotor não são acessíveis, como no caso do rotor bobinado, seu uso é restrito à casos que requerem elevado conjugado de partida.
A aplicação de tensão alternada nos enrolamentos do estator produzirá um campo magnético variante no tempo que devido à distri-buição uniforme do enrolamento do estator gera um campo magnético resultante girante na velocidade proporcional à freqüência da rede trifá-sica. De acordo com a lei de Lenz, quando houver uma velocidade relativa entre a velocidade do rotor e o campo girante, surgirá uma tensão indu-zida no rotor, que por sua vez fará circular uma corrente elétrica em seus enrolamentos. Pela lei de Lorentz, a ação da corrente elétrica no rotor fará surgir uma força rotacional no eixo do motor (Conjugado4), na qual tenderá a impor uma velocidade no rotor. Note que para haver tensão induzida no rotor, e consequentemente torque eletromagnético, a veloci-dade do rotor deve ser diferente da velociveloci-dade do campo girante. Essa diferença de velocidade, conhecida como escorregamento, faz com que o rotor não gire em sincronismo com o campo girante, por esse motivo o motor de indução trifásico é também conhecido como motor assíncrono trifásico.
2 Dois terminais por enrolamento. 3 Ou simplesmente, rotor gaiola.
2.2. MODELO TRIFÁSICO 41
Para a representação do motor de indução, ir-se-á obter um mo-delo de acordo com as equações circuitais do motor, conforme efetuado em Marques (1996). Esse modelo é válido para qualquer tipo de máquina de indução simétrica, desde que sejam consideradas algumas hipóteses simplificadoras:
1. Enrolamentos estatóricos são idênticos e simétricos5;
2. Enrolamentos rotóricos são idênticos e simétricos;
3. O entreferro possui largura constante;
4. Material ferromagnético linear, sem saturação ou histerese;
5. A densidade de fluxo magnético no entreferro é radial, e sua distri-buição espacial é considerada senoidal;
6. Perdas magnéticas e no ferro são desprezadas.
Uma vez que o objetivo do trabalho é a identificação paramétrica, deve-se obter o modelo do MIT através de suas equações circuitais, de modo a entender com clareza o que cada parâmetro do motor representa no modelo matemático e também no controle.
2.2 MODELO TRIFÁSICO
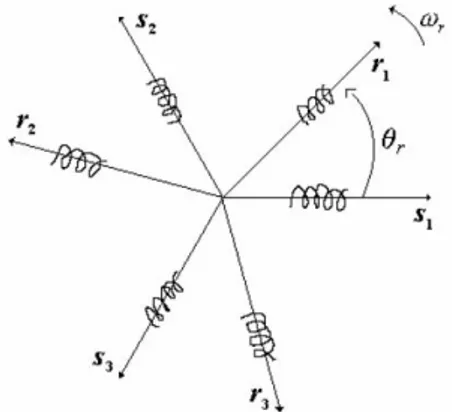
Em função das hipóteses definidas anteriormente, a Figura 2.1 apresenta a representação do motor de indução trifásico.
Os parâmetros elétricos do motor, devido às hipóteses simplifica-doras, ficam
𝐿123
𝑠1 =𝐿
123
𝑠2 =𝐿
123
𝑠3 =𝐿
123
𝑠
𝐿123
𝑟1 =𝐿
123
𝑟2 =𝐿
123
𝑟3 =𝐿
123
𝑟
Figura 2.1: Representação fasorial da máquina trifásica.
𝑀𝑠12 =𝑀𝑠13=𝑀𝑠23 =𝑀𝑠
𝑀𝑟12 =𝑀𝑟13 =𝑀𝑟23 =𝑀𝑟
𝑅𝑠1=𝑅𝑠2=𝑅𝑠3=𝑅𝑠
𝑅𝑟1=𝑅𝑟2=𝑅𝑟3=𝑅𝑟onde,
𝐿123
𝑠 = Indutância própria do estator por fase;
𝐿123
𝑟 = Indutância própria do rotor por fase;
𝑀𝑠= Indutância mútua entre duas fases de estator;
𝑀𝑟= Indutância mútua entre duas fases de rotor;
𝑅𝑠= Resistência de estator por fase;
2.2. MODELO TRIFÁSICO 43
As indutâncias mútuas são funções senoidais da posição angular𝜃𝑟, que é definida como:
𝜃𝑟=𝜃𝑟0+ ∫︁
âæ𝑟𝑑𝑡 (2.1)
ondeæ𝑟é velocidade mecânica do rotor,âé o número de pares de polos do motor e𝜃𝑟0a posição inicial.
Com a aplicação das leis de Kirchhoff aos circuitos elétricos de rotor e estator, pode-se escrever na forma matricial compacta as seguin-tes relações:
Vs=RsIs+Φ˙s (2.2)
Vr=RrIr+Φ˙r (2.3)
com
Vs= [𝑉𝑠1, 𝑉𝑠2, 𝑉𝑠3]𝑇 Vr= [𝑉𝑟1, 𝑉𝑟2, 𝑉𝑟3]𝑇 (2.4)
Is= [𝐼𝑠1, 𝐼𝑠2, 𝐼𝑠3]𝑇 Ir= [𝐼𝑟1, 𝐼𝑟2, 𝐼𝑟3]𝑇 (2.5)
Rs=
⋃︀
⋁︀ ⨄︀
𝑅𝑠 0 0
0 𝑅𝑠 0
0 0 𝑅𝑠 ⋂︀
⎥
⋀︀ Rr=
⋃︀
⋁︀ ⨄︀
𝑅𝑟 0 0
0 𝑅𝑟 0
0 0 𝑅𝑟 ⋂︀
⎥
⋀︀ (2.6)
˙ Φs=
𝑑 𝑑𝑡Φs =
𝑑
𝑑𝑡[ã𝑠1 ã𝑠2 ã𝑠3]
𝑇 (2.7)
˙ Φr=
𝑑 𝑑𝑡Φr=
𝑑
𝑑𝑡[ã𝑟1 ã𝑟2 ã𝑟3]
𝑇 (2.8)
e sendo que:
ΦseΦrsão, respectivamente, os vetores de fluxo enlaçado com
os enrolamentos de estator e de rotor;
VseVrrepresentam, respectivamente, os vetores de tensão de
estator e tensão de rotor;
Rs eRrsão as matrizes de resistência de estator e rotor,
res-pectivamente.
Além das Equações (2.7) e (2.8), o fluxo enlaçado pode ser re-presentado por:
Φs=LssIs+MsrIr (2.9)
Φr=MrsIs+LrrIr (2.10)
onde as matrizes de indutâncias de estator e rotor são
Lss=
⋃︀
⋁︀ ⨄︀
𝐿123
𝑠 𝑀𝑠 𝑀𝑠
𝑀𝑠 𝐿123𝑠 𝑀𝑠
𝑀𝑠 𝑀𝑠 𝐿123𝑠 ⋂︀
⎥ ⋀︀
Lrr=
⋃︀
⋁︀ ⨄︀
𝐿123
𝑟 𝑀𝑟 𝑀𝑟
𝑀𝑟 𝐿123𝑟 𝑀𝑟
𝑀𝑟 𝑀𝑟 𝐿123𝑟 ⋂︀
⎥ ⋀︀
(2.11)
e a matriz de indutâncias mútuas estator-rotor é
Msr=𝑀𝑠𝑟 ⋃︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⨄︀
cos𝜃𝑟 cos (︀
𝜃𝑟+23Þ
)︀
cos(︀
𝜃𝑟⊗23Þ
)︀
cos(︀
𝜃𝑟⊗23Þ
)︀
cos𝜃𝑟 cos(︀𝜃𝑟+23Þ
)︀
cos(︀
𝜃𝑟+23Þ
)︀
cos(︀
𝜃𝑟⊗23Þ
)︀
cos𝜃𝑟 ⋂︀ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⋀︀ (2.12)
𝑀𝑟𝑠é diretamente relacionada com𝑀𝑠𝑟pela seguinte relação:
Mrs=MTrs
As derivadas temporais dos fluxos de estator e de rotor, obtidas de (2.9) e (2.10), são
˙
Φs=Lss˙Is+Msr˙Ir+ ˙𝜃𝑟
𝜕Msr
𝜕𝜃𝑟
Ir (2.13)
˙
Φr=Lrr˙Ir+Mrs˙Is+ ˙𝜃𝑟
𝜕Mrs
𝜕𝜃𝑟
2.2. MODELO TRIFÁSICO 45
Assim, pela substituição de (2.13) em (2.2) e de (2.14) em (2.3), as equações das tensões de estator e de rotor ficam:
Vs=RsIs+Lss˙Is+Msr˙Ir+ ˙𝜃𝑟
𝜕Msr
𝜕𝜃𝑟
Ir (2.15)
Vr=RrIr+Lrr˙Ir+Mrs˙Is+ ˙𝜃𝑟
𝜕Mrs
𝜕𝜃𝑟
Is (2.16)
Relativamente ao sistema mecânico motor-carga, sua dinâmica pode ser modelada por
á𝑚=𝑏æ𝑟+𝐽æ˙𝑟+á𝑐 (2.17) ondeá𝑚representa o conjugado eletromagnético,𝑏æ𝑟o conjugado asso-ciado às perdas mecânicas do motor (𝑏é o coeficiente de atrito viscoso no eixo do motor),𝐽æ˙𝑟é o conjugado acelerante do sistema motor-carga (𝐽 é o momento de inércia do sistema) eá𝑐 é o conjugado resistente ou conjugado de carga.
A expressão da potência total que o motor absorve da rede elé-trica é
𝑃𝑡=ITsVs+ITrVr (2.18)
Desta forma, a substituição das equações das tensões, (2.15) e (2.16), em (2.18), leva a
𝑃𝑡=ITs RsIs+ITsLss˙Is+ITsMsr˙Ir+ITs 𝜕M
sr
𝜕𝜃r Ir
˙ 𝜃𝑟+
IT
rRrIr+ITrLrr˙Ir+ITrMrs˙Is+ITr 𝜕 Mrs
𝜕𝜃r Is
˙ 𝜃𝑟
(2.19)
Da potência total que o motor absorve, uma parte é dissipada em calor, outra fica armazenada no campo magnético e o restante transforma-se em conjugado eletromagnético. As parcelas correspondentes às per-dasJoulede estator e de rotor são facilmente identificadas pelos termos IT
sRsIs e ITrRrIr, respectivamente. A energia armazenada no campo
magnético pode ser escrita como
𝑊 = 1 2I
T
sLssIs+ 1 2I
T
rLrrIr+ 1 2I
T
sMsrIr+ 1 2I
T
Portanto, a parcela da potência de entrada que é utilizada para armazenar energia no campo magnético do motor, representada pela de-rivada temporal de (2.20), fica
˙ 𝑊 =IT
sLss˙Is+ITrLrr˙Ir+ 1 2I
T
sMsr˙Ir+
1 2I
T
rMrs˙Is+ 1 2I
T s
𝜕Msr
𝜕𝜃𝑟
Ir𝜃˙𝑟+
1 2I
T
rMrs˙Is+
1 2I
T
s Msr˙Ir+ 1 2I
T r
𝜕Mrs
𝜕𝜃𝑟 Is𝜃˙𝑟
(2.21)
e a Equação (2.19) pode ser reescrita do seguinte modo:
𝑃𝑡=ITsRsIs+ITrRrIr+ ˙𝑊+
1 2I
T r
𝜕Mrs
𝜕𝜃𝑟
˙Is𝜃˙𝑟+
1 2I
T s
𝜕Msr
𝜕𝜃𝑟 ˙Ir𝜃˙𝑟
(2.22) como 1 2I T s
𝜕Msr
𝜕𝜃𝑟
˙Ir𝜃˙𝑟=
1 2I
T r
𝜕Mrs
𝜕𝜃𝑟
˙Is𝜃˙𝑟 (2.23) a equação da potência absorvida pelo motor toma a forma
𝑃𝑡=ITsRsIs+ITrRrIr+ ˙𝑊+ITs
𝜕Msr
𝜕𝜃𝑟
˙Ir𝜃˙𝑟 (2.24)
de onde pode ser identificado que o termo
ITs 𝜕Msr
𝜕𝜃𝑟
˙Ir𝜃˙𝑟 (2.25)
corresponde à potencia mecânica,𝑃𝑚, associada ao conjugado eletro-magnético. Como o conjugado eletromagnético é relacionado com a po-tência mecânica por
á𝑚=
𝑃𝑚
æ𝑟
(2.26)
pode ser reescrito na forma
á𝑚=
𝐼𝑇 𝑠
𝜕𝑀𝑠𝑟
𝜕𝜃𝑟
˙ 𝐼𝑟𝜃˙𝑟
æ𝑟
2.3. MODELO BIFÁSICO 47
por fim, o uso da relação
æ𝑟=
˙ 𝜃𝑟
â (2.28)
permite obter uma expressão para o conjugado eletromagnético desen-volvido pelo motor, que é função das correntes e das indutâncias, como segue
á𝑚=âITs
𝜕Msr
𝜕𝜃𝑟
˙Ir (2.29)
A substituição de (2.29) em (2.17) leva a equação mecânica a tomar a forma
âITs 𝜕Msr
𝜕𝜃𝑟
Ir=𝑏æ𝑟+𝐽æ˙𝑟+á𝑐 (2.30)
Assim, o conjunto das Equações (2.15), (2.16) e (2.30), agru-padas a seguir, representa o modelo completo da máquina de indução trifásica:
𝑉𝑠=RsIs+Lss˙Is+Msr˙Ir+ ˙𝜃𝑟𝜕𝜕𝜃MrsrIr
𝑉𝑟=RrIr+Lrr˙Ir+Mrs˙Is+ ˙𝜃𝑟𝜕𝜕𝜃MrrsIs
âIT s
𝜕Msr
𝜕𝜃𝑟
Ir=𝑏æ𝑟+𝐽æ˙𝑟+á𝑐
(2.31)
2.3 MODELO BIFÁSICO
O modelo bifásico do motor, no sistema de coordenadas estaci-onário, pode ser obtido pela aplicação das transformações Ks
ÐÑ eKrÐÑ e suas inversas (Ks
ÐÑ)⊗
1 e(Kr
ÐÑ)⊗
1, apresentadas no Apêndice A, às
equações do modelo trifásico.
A partir da aplicação das transformações de coordenadas, o fluxo de estator é então obtido por:
KsÐÑΦs=KsÐÑLssIs+KsÐÑMsrIr (2.32)
como
Is=
(︀
e,
Ir=
(︀
KrÐÑ)︀⊗1
IrÐÑ (2.34)
OndeIs
ÐÑ eIrÐÑ representam, respectivamente, os vetores das correntes de estator e de rotor no sistema de coordenadas estacionário. Então, a Equação (2.32) apresenta-se na forma
ãs
ÐÑ=K
s
ÐÑLss(︀KsÐÑ)︀⊗
1
IsÐÑ+KsÐÑMsr(︀KrÐÑ)︀⊗
1
IrÐÑ (2.35)
A matriz de indutâncias de estator transformada para o referen-cial estacionário, é dada por
KsÐÑLss(︀KsÐÑ)︀⊗
1 = ⋃︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⨄︀ 𝐿123
𝑠 ⊗𝑀𝑠 0 0
0 𝐿123
𝑠 ⊗𝑀𝑠 0
0 0 𝐿123
𝑠 + 2𝑀𝑠 ⋂︀ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⋀︀ (2.36) e a matriz de indutâncias mútuas estator-rotor é
KsÐÑMsr(︀KsÐÑ)︀⊗
1 = 3
2𝑀𝑠𝑟
⋃︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⨄︀
1 0 0
0 1 0
0 0 0
2.3. MODELO BIFÁSICO 49
Assim, os fluxos estatóricos no referencial estacionário são
⋃︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⨄︀ ã𝑠 Ð ã𝑠 Ñ ã𝑠 0 ⋂︀ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⋀︀ = ⋃︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⨄︀ 𝐿123
𝑠 ⊗𝑀𝑠 0 0
0 𝐿123
𝑠 ⊗𝑀𝑠 0
0 0 𝐿123
𝑠 + 2𝑀𝑠 ⋂︀ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⋀︀ ⋃︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⨄︀ 𝑖𝑠 Ð 𝑖𝑠 Ñ 𝑖𝑠 0 ⋂︀ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⋀︀ +... ...3 2𝑀𝑠𝑟
⋃︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⨄︀
1 0 0
0 1 0
0 0 0
⋂︀ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⋀︀ ⋃︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⨄︀ 𝑖𝑟 Ð 𝑖𝑟 Ñ 𝑖𝑟 0 ⋂︀ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⋀︀ (2.38)
Com alimentação estatórica simétrica resulta que𝑖𝑠
0= 0e𝑖𝑟0= 0,
portanto
ã𝑠Ð=𝐿𝑠𝑖𝑠Ð+𝐿𝑠𝑟𝑖𝑟Ð (2.39)
ã𝑠Ñ=𝐿𝑠𝑖𝑠Ñ+𝐿𝑠𝑟𝑖𝑟Ñ (2.40)
ã𝑠0= 0 (2.41)
onde
𝐿𝑠=𝐿123𝑠 ⊗𝑀𝑠 (2.42)
𝐿𝑠𝑟=
3
2𝑀𝑠𝑟 (2.43)
As indutâncias𝐿𝑠e𝐿𝑠𝑟recebem, respectivamente, os nomes de Indutância Cíclica do Estator e Indutância Mútua Cíclica. Como será visto, essas indutâncias terão uma grande importância nos modelos obtidos para o motor de indução.
(2.10), para uma alimentação estatórica simétrica, tem-se:
ã𝑟
Ð=𝐿𝑟𝑖𝑟Ð+𝐿𝑠𝑟𝑖𝑠Ð (2.44)
ã𝑟Ñ=𝐿𝑟𝑖𝑟Ñ+𝐿𝑠𝑟𝑖𝑠Ñ (2.45)
ã𝑟
0= 0 (2.46)
onde
𝐿𝑟=𝐿123𝑟 ⊗𝑀𝑟 (2.47)
A indutância𝐿𝑟é denominada Indutância Cíclica do Rotor e cons-tituirá um parâmetro importante nos modelos obtidos para o motor de in-dução. As equações de tensão são obtidas a partir de (2.2) e (2.3). Para o estator, tem-se:
KsÐÑVs=KsÐÑRsIs+KsÐÑΦ˙s (2.48)
que pode ser reescrita como
VsÐÑ=KsÐÑRs(︀KsÐÑ)︀⊗
1
Is+KsÐÑΦ˙s (2.49)
e comoRsé proporcional à matriz identidade, definida em (2.6), tem-se
KsÐÑRs
(︀
KsÐÑ)︀⊗1
=Rs (2.50)
A transformação da derivada temporal do fluxo de estator é
KsÐÑΦ˙s=
𝑑 𝑑𝑡¶K
s
ÐÑΦs♢ ⊗
𝑑 𝑑𝑡¶K
s
ÐÑ♢Φs (2.51)
sendo
𝑑 𝑑𝑡¶K
s
ÐÑ♢Φs= [0]3×3 (2.52)
pode-se escrever
2.3. MODELO BIFÁSICO 51
A equação de tensão de estator no referencial estacionário é ob-tida pela substituição de (2.50) e (2.53) em (2.49), o que resulta em:
VsÐÑ=RsIsÐÑ+ã˙
s
ÐÑ (2.54)
Assim, com alimentação estatórica simétrica tem-se que
𝑉Ð𝑠=𝑅𝑠𝑖𝑠Ð+ ˙ã𝑠Ð (2.55)
𝑉𝑠
Ñ =𝑅𝑠𝑖𝑠Ñ+ ˙ã𝑠Ñ (2.56)
𝑉𝑠
0 = 0 (2.57)
A obtenção da tensão de rotor é feita a partir da Equação (2.3), como segue
KsÐÑVr=KrÐÑRrIr+KrÐÑΦ˙r (2.58)
que pode ser reescrita na forma
VrÐÑ=KrÐÑRr
(︀
KrÐÑ)︀⊗1Ir+KrÐÑΦ˙r (2.59)
Da definição deRr(Equação (2.6)), resulta
KrÐÑRr(︀KrÐÑ)︀⊗
1
=Rr (2.60)
como
KrÐÑΦ˙r=
𝑑 𝑑𝑡¶K
r
ÐÑΦr♢ ⊗
𝑑 𝑑𝑡¶K
r
ÐÑ♢Φr (2.61)
e
𝑑 𝑑𝑡¶K
r
ÐÑ♢Φr=
⋃︀ ⋁︀ ⨄︀ ã𝑟 Ñ ã𝑟 Ð 0 ⋂︀ ⎥
⋀︀â(⊗æ𝑟) (2.62)
a transformação da derivada temporal do fluxo rotórico, fica
KrÐÑΦ˙r=ã˙rÐÑ⊗ ⋃︀ ⋁︀ ⨄︀ ã𝑟 Ñ ã𝑟 Ð 0 ⋂︀ ⎥
Desta forma, a equação da tensão de rotor no referencial estaci-onário é
VrÐÑ=RrIrÐÑ+ã˙rÐÑ+
⋃︀ ⋁︀ ⨄︀ ã𝑟 Ñ ã𝑟 Ð 0 ⋂︀ ⎥
⋀︀â(⊗æ𝑟) (2.64) com alimentação estatórica simétrica, a Equação (2.64) particulariza-se para:
𝑉𝑟
Ð =𝑅𝑟𝑖𝑟Ð+ ˙ã𝑟Ð+ã𝑟Ñâæ𝑟 (2.65)
𝑉Ñ𝑟=𝑅𝑟𝑖𝑟Ñ+ ˙ã𝑟Ñ⊗ã𝑟Ðâæ𝑟 (2.66)
𝑉𝑟
0 = 0 (2.67)
As Equações (2.65), (2.66) e (2.67) definem, portanto, a dinâmica do sistema elétrico. A dinâmica do sistema mecânico pode ser obtida pela aplicação das transformações de variáveis à Equação (2.30), tal que
â(︀
IsÐÑ)︀𝑇[︁(︀KÐÑs )︀⊗1]︁𝜕Msr
𝜕𝜃𝑟 (︀
KrÐÑ)︀⊗1IrÐÑ=𝑏æ𝑟+𝐽æ˙𝑟+á𝑐 (2.68)
Uma vez que a transformaçãoKsÐÑé ortogonal, tem-se:
â(︀
IsÐÑ)︀𝑇KsÐÑ𝜕Msr
𝜕𝜃𝑟 (︀
KrÐÑ)︀⊗1IrÐÑ=𝑏æ𝑟+𝐽æ˙𝑟+á𝑐 (2.69) onde
KsÐÑ𝜕Msr
𝜕𝜃𝑟 (︀
KrÐÑ)︀⊗1
=𝐿𝑠𝑟 ⋃︀
⋁︀ ⨄︀
0 ⊗1 0 1 0 0 0 0 0
⋂︀
⎥
⋀︀ (2.70)
Assim, a equação mecânica no referencial estacionário fica:
â𝐿𝑠𝑟[︀𝑖𝑠Ð𝑖𝑠Ñ 𝑖𝑠0
⌊︃ ⋃︀
⋁︀ ⨄︀
0 ⊗1 0 1 0 0 0 0 0
⋂︀ ⎥ ⋀︀ ⋃︀ ⋁︀ ⨄︀ 𝑖𝑟 Ð 𝑖𝑟 Ñ 𝑖𝑟 0 ⋂︀ ⎥
⋀︀=𝑏æ𝑟+𝐽æ˙𝑟+á𝑐 (2.71)
o que corresponde a
â𝐿𝑠𝑟 (︀
𝑖𝑠
Ñ𝑖𝑟Ð⊗𝑖𝑠Ð𝑖𝑟Ñ )︀
2.3. MODELO BIFÁSICO 53
Portanto, o modelo dinâmico da máquina de indução simétrica, sob alimentação equilibrada, no referencial estacionário, é dado pelo con-junto das Equações (2.39), (2.40), (2.44), (2.45), (2.55), (2.56), (2.65), (2.66) e (2.72), Com isso tem-se:
• Equações Elétricas:
⋃︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⨄︀ ã𝑠 Ð ã𝑠 Ñ ã𝑟 Ð ã𝑟 Ñ ⋂︀ ⎥ ⎥ ⎥ ⎥ ⋀︀ = ⋃︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⨄︀
𝐿𝑠 0 𝐿𝑠𝑟 0
0 𝐿𝑠 0 𝐿𝑠𝑟
𝐿𝑠𝑟 0 𝐿𝑠 0
0 𝐿𝑠𝑟 0 𝐿𝑠 ⋂︀ ⎥ ⎥ ⎥ ⎥ ⋀︀ ⋃︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⨄︀ 𝑖𝑠 Ð 𝑖𝑠 Ñ 𝑖𝑟 Ð 𝑖𝑟 Ñ ⋂︀ ⎥ ⎥ ⎥ ⎥ ⋀︀ (2.73) ⋃︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⨄︀ 𝑉𝑠 Ð 𝑉𝑠 Ñ 𝑉𝑟 Ð 𝑉𝑟 Ñ ⋂︀ ⎥ ⎥ ⎥ ⎥ ⋀︀ = ⋃︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⨄︀
𝑅𝑠 0 0 0
0 𝑅𝑠 0 0
0 0 𝑅𝑠 0
0 0 0 𝑅𝑠 ⋂︀ ⎥ ⎥ ⎥ ⎥ ⋀︀ ⋃︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⨄︀ 𝑖𝑠 Ð 𝑖𝑠 Ñ 𝑖𝑟 Ð 𝑖𝑟 Ñ ⋂︀ ⎥ ⎥ ⎥ ⎥ ⋀︀ +. . . . . . ⋃︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⨄︀ ˙ ã𝑠 Ð ˙ ã𝑠 Ñ ˙ ã𝑟 Ð ˙ ã𝑟 Ñ ⋂︀ ⎥ ⎥ ⎥ ⎥ ⋀︀ + ⋃︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⨄︀ 0 0 ã𝑟
Ñâæ𝑟 ⊗ã𝑟
Ðâæ𝑟 ⋂︀ ⎥ ⎥ ⎥ ⎥ ⋀︀ (2.74)
• Equação Mecânica:
â𝐿𝑠𝑟(︀𝑖𝑠Ñ𝑖𝑟Ð⊗𝑖𝑠Ð𝑖𝑟Ñ )︀
=𝑏æ𝑟+𝐽æ˙𝑟+á𝑐 (2.75)
2.3.1 Representação no Espaço de Estados pelas Correntes e Fluxos Estatóricos
No decorrer deste trabalho será necessária a reconstrução dos sisnais de fluxo estatórico para que seja realizada a estimação paramé-trica. Portanto, a representação em espaço de estados pelas correntes e fluxos estatóricos se torna uma excelente opção.
Seja o vetor de estados do sistema elétrico dado por
𝑥=[︀
𝑖𝑠
Ð𝑖𝑠Ñã𝑠Ðã𝑠Ñ ⌊︃𝑇
O modelo de estados do sistema elétrico pode ser obtido a par-tir das Equações (2.73), (2.74) e (2.75). Da Equação (2.73), isola-se as variáveis𝑖𝑟
Ðe𝑖𝑟Ñ, com isso
𝑖𝑟 Ð= 1 𝐿𝑠𝑟 ã𝑠 Ð⊗ 𝐿𝑠 𝐿𝑠𝑟 𝑖𝑠 Ð (2.77)
𝑖𝑟Ñ=
1 𝐿𝑠𝑟
ã𝑠Ñ⊗
𝐿𝑠
𝐿𝑠𝑟
𝑖𝑠Ñ (2.78)
e substituindo nas equações dos fluxos rotóricos em (2.73), tem-se
ã𝑟
Ð=
(︂
𝐿𝑠𝑟⊗
𝐿𝑟𝐿𝑠
𝐿𝑠𝑟 )︂ 𝑖𝑠 Ð+ 𝐿𝑟 𝐿𝑠𝑟 ã𝑠 Ð (2.79)
ã𝑟Ñ= (︂
𝐿𝑠𝑟⊗
𝐿𝑟𝐿𝑠
𝐿𝑠𝑟 )︂
𝑖𝑠Ñ+
𝐿𝑟
𝐿𝑠𝑟
ã𝑠Ñ (2.80)
As derivadas temporais dos fluxos rotóricos são
𝑑 𝑑𝑡ã
𝑟
Ð=
(︂
𝐿𝑠𝑟⊗
𝐿𝑟𝐿𝑠
𝐿𝑠𝑟 )︂ 𝑑 𝑑𝑡𝑖 𝑠 Ð+ 𝐿𝑟 𝐿𝑠𝑟 𝑑 𝑑𝑡ã 𝑠 Ð (2.81) 𝑑 𝑑𝑡ã 𝑟 Ñ= (︂
𝐿𝑠𝑟⊗
𝐿𝑟𝐿𝑠
𝐿𝑠𝑟 )︂ 𝑑 𝑑𝑡𝑖 𝑠 Ñ+ 𝐿𝑟 𝐿𝑠𝑟 𝑑 𝑑𝑡ã 𝑠 Ñ (2.82)
Assumindo que o motor opera com o rotor em curto-circuito e substituindo (2.77), (2.80), (2.81), (2.55) em (2.65), resulta em
𝑉𝑟
Ð = 0 =𝑅𝑟 (︂ 1 𝐿𝑠𝑟 ã𝑠 Ð⊗ 𝐿𝑠 𝐿𝑠𝑟 𝑖𝑠 Ð )︂ + (︂
𝐿𝑠𝑟⊗
𝐿𝑟𝐿𝑠
𝐿𝑠𝑟 )︂
𝑑 𝑑𝑡𝑖
𝑠 Ð+. . .
. . . 𝐿𝑟 𝐿𝑠𝑟
(𝑉𝑠
Ð⊗𝑅𝑠𝑖𝑠Ð) + [︂(︂
𝐿𝑠𝑟⊗
𝐿𝑟𝐿𝑠
𝐿𝑠𝑟 )︂ 𝑖𝑠 Ñ+ 𝐿𝑟 𝐿𝑠𝑟 ã𝑠 Ñ ]︂ âæ𝑟 (2.83) substituindo (2.78), (2.79), (2.82), (2.56) em (2.66), tem-se:
𝑑 𝑑𝑡𝑖
𝑠
Ð=⊗
(︂𝑅
𝑟𝐿𝑠+𝑅𝑠𝐿𝑟
à𝐿𝑠𝐿𝑟 )︂
𝑖𝑠
Ð⊗âæ𝑟𝑖𝑠Ñ+
𝑅𝑟
à𝐿𝑠𝐿𝑟
ã𝑠 Ð+. . .
2.3. MODELO BIFÁSICO 55
𝑑 𝑑𝑡𝑖
𝑠
Ñ =âæ𝑟𝑖𝑠Ð⊗ (︂
𝑅𝑟𝐿𝑠+𝑅𝑠𝐿𝑟
à𝐿𝑠𝐿𝑟 )︂
𝑖𝑠 Ñ+
𝑅𝑟
à𝐿𝑠𝐿𝑟
ã𝑠 Ñ⊗. . .
. . .âæ𝑟 à𝐿𝑠 ã𝑠 Ð+ 1 à𝐿𝑠 𝑉𝑠 Ñ (2.85) sendo que
à= 1⊗ 𝐿
2
𝑠𝑟
𝐿𝑠𝐿𝑟
(2.86)
O modelo de estados para o sistema mecânico é obtido pela substituição de (2.77) e (2.78) em (2.75):
â𝐿𝑠𝑟 [︂ 𝑖𝑠 Ñ (︂ 1 𝐿𝑠𝑟 ã𝑠 Ð⊗ 𝐿𝑠 𝐿𝑠𝑟 𝑖𝑠 Ð )︂
+𝑖𝑠 Ð (︂ 1 𝐿𝑠𝑟 ã𝑠 Ñ⊗ 𝐿𝑠 𝐿𝑠𝑟 𝑖𝑠 Ñ )︂]︂ =. . . . . . 𝑏æ𝑟+𝐽æ˙𝑟+á𝑐
(2.87)
resultando em
â(︀
𝑖𝑠
Ñã𝑠Ð⊗𝑖𝑠Ðã𝑠Ñ )︀
=𝑏æ𝑟+𝐽æ˙𝑟+á𝑐 (2.88)
Assim, as equações de estados que modelam o motor de indu-ção no sistema de coordenadas estacionário, em termos de correntes e fluxos estatóricos, são:
• Modelo de Estados do Sistema Elétrico
⋃︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⨄︀ ˙ 𝑖𝑠 Ð ˙ 𝑖𝑠 Ñ ˙ ã𝑠 Ð ˙ ã𝑠 Ñ ⋂︀ ⎥ ⎥ ⎥ ⎥ ⋀︀ = ⋃︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⨄︀
⊗(𝐾1+𝐾2) ⊗âæ𝑟
Ñ 𝐿𝑠
âæ𝑟
à𝐿𝑠
âæ𝑟 ⊗(𝐾1+𝐾2)
âæ𝑟
à𝐿𝑠
Ñ 𝐿𝑠
⊗𝑅𝑠 0 0 0
0 ⊗𝑅𝑠 0 0
• Modelo de Estados do Sistema Mecânico
˙ æ𝑟=
â 𝐽
(︀
𝑖𝑠
Ñã𝑠Ð⊗𝑖𝑠Ðã𝑠Ñ )︀
⊗𝐽𝑏æ𝑟⊗
á𝑐
𝐽 (2.90)
onde
𝐾1= 𝑅𝑠 à𝐿𝑠
𝑒 𝐾2= 𝑅𝑟 à𝐿𝑟
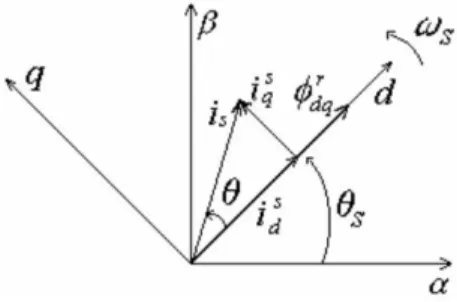
2.3.2 Modelo no Sistema de Coordenadas Síncrono ao Campo Girante
As matrizes do modelo de estados descrito por (2.89) e (2.90) modelam o motor de indução no referencial estacionário. Tais equações serão úteis para aplicações de simulação do motor de indução, uma vez que será necessário o conhecimento da dinâmica do fluxo de estator para o processo de estimação paramétrica. Por outro lado, em termos de con-trole vetorial, precisa-se obter as principais equações do motor no refe-rencial girante, ou seja, que gira com o fluxo de rotor. Portanto, este pode ser obtido com auxílio das transformações (A.15) e (A.16) aplicadas às equações do modelo trifásico.
A velocidade de rotação do sistema bifásico é obtida fazendo-seæ = æ𝑠, onde æ𝑠 representa a velocidade angular síncrona. Com a consideração de que𝜙= 0e𝜙0=𝜃𝑠0 = 0, o ângulo elétrico da posição desse referencial assume o valor da posição angular do fluxo, dada por
𝜃𝑠=∫︀ âæ𝑠𝑑𝑡.
2.3. MODELO BIFÁSICO 57
• Modelo de Estados do Sistema Elétrico
⋃︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⨄︀ ˙ 𝑖𝑠 𝑑 ˙ 𝑖𝑠 𝑞 ˙ ã𝑟 𝑑 ˙ ã𝑟 𝑞 ⋂︀ ⎥ ⎥ ⎥ ⎥ ⋀︀ = ⋃︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⨄︀
⊗Ò âæ𝑠
Ù á𝑟
âæ𝑠Ù ⊗âæ𝑠 ⊗Ò ⊗âæ𝑠Ù
Ù á𝑟
𝐿𝑠𝑟
á𝑟
0 ⊗á1 𝑟
âæ𝑠𝑙
0 𝐿𝑠𝑟 á𝑟 ⊗
âæ𝑠𝑙 ⊗
1 á𝑟 ⋂︀ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⋀︀ . . . . . . ⋃︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⨄︀ 𝑖𝑠 𝑑 𝑖𝑠 𝑞 ã𝑟 𝑑 ã𝑟 𝑞 ⋂︀ ⎥ ⎥ ⎥ ⎥ ⋀︀ + ⋃︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⋁︀ ⨄︀ 1 à𝐿𝑠 0 0 1 à𝐿𝑠 0 0 0 0 ⋂︀ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⋀︀ + ⎟ 𝑉𝑠 𝑑 𝑉𝑠 𝑞 ⟨ (2.91)
• Modelo de Estados do Sistema Mecânico
˙ æ𝑟=
â𝐿𝑠𝑟
𝐽𝐿𝑟 (︀
𝑖𝑠
𝑞ã𝑠𝑑⊗𝑖𝑠𝑑ã𝑠𝑞 )︀
⊗ 𝑏
𝐽æ𝑟⊗ á𝑐
𝐽 (2.92)
onde
á𝑟=
𝐿𝑟
𝑅𝑟
, Ù= 𝐿𝑠𝑟 à𝐿𝑠𝐿𝑟
, Ò= 𝑅𝑠𝐿 2
𝑟+𝑅𝑟𝐿2𝑠𝑟
à𝐿𝑠𝐿2𝑟
𝑒 æ𝑠𝑙=æ𝑠⊗æ𝑟
59
3 CONTROLE VETORIAL DO MOTOR DE INDUÇÃO
TRI-FÁSICO E O ESTUDO DA INFLUÊNCIA DOS
PARÂME-TROS
Neste capítulo será abordada a formulação das relações para a implementação do controle vetorial, bem como suas definições. Será tratado também a influência dos parâmetros do motor dentro do controle, e de que forma a variação desses parâmetros diminui o desempenho do controle vetorial.
3.1 INTRODUÇÃO
Até a década de 80, o motor CC era utilizado para condições de controle de velocidade ou posição devido ao seu desacoplamento ine-rente de fluxo e conjugado (ROSA, 2000). Entretanto, com o avanço da eletrônica de potência e com microprocessadores mais rápidos e con-fiáveis, foi possível estudar mais profundamente as técnicas de controle para o motor de indução, até então inexploradas. O motor CC, apesar de ser facilmente controlável, possui dinâmica limitada e sua relação potência-peso é consideravelmente menor se comparado ao motor de indução.
O surgimento dos princípios teóricos do controle vetorial, ocor-rido no final da década de 60 e início da década de 70 com os trabalhos de Hasse (1969) e Blaschke (1974) permitiu que o motor de indução fosse controlado da mesma forma que o motor CC de excitação independente. A base teórica se baseia no alinhamento do fluxo do motor com o eixo direto do sistema de coordenadas síncrono, conhecido como FOC (Fi-eld Oritented Control) resultando em desacoplamento entre fluxo e con-jugado. Com isso, a corrente de estator apresentam duas componentes defasadas de90◇, denominadas corrente de eixo direto e corrente de eixo em quadratura.
três fluxos presentes na máquina (rotor, estator e entreferro), entretanto apenas o alinhamento do fluxo de rotor promove o desacoplamento com-pleto entre fluxo e conjugado (DEDONKER; NOVOTNY, 1994).
A Figura 3.1 mostra a representação dos fasores presentes no controle vetorial com orientação por fluxo de rotor. Neste caso, nota-se que o fluxo de rotor está alinhado com o eixo direto do sistema de coorde-nadas. Além disso, é possível verificar que para promover o alinhamento é necessário o conhecimento da posição do fluxo (𝜃𝑠)1.
Figura 3.1: Representação espacial do controle vetorial. FONTE: Ferrari (2005)
Há duas formas de se calcular a posição do fluxo:
• Método Direto;
• Método Indireto.
No método direto2, como o próprio nome sugere, a posição do fluxo é medida diretamente com o uso de bobinas exploradoras ou sen-sores de efeito hall instalados no interior da máquina. Alternativamente, pode-se implementar observadores de fluxo que utilizam as gradezas ter-minais (Tensões, correntes, velocidade) para a sua medição. Há também a possibilidade do cálculo do fluxo em função da medição da terceira