Universidade do Minho
Escola de Engenharia
Jorge Filipe Bouça Barreira
UMinho|20
14
Jor
ge F
ilipe Bouça Barr
eir
a
Deteção das pernas e controlo do andarilho
recorrendo a um sensor laser range finder
De teção das pernas e controlo do andarilho recorrendo a um sensor laser range finder
Dissertação de Mestrado
Mestrado Integrado em Engenharia Biomédica
Ramo Eletrónica Médica
Trabalho efetuado sob a orientação da
Professora Doutora Cristina Manuela Peixoto dos Santos
Universidade do Minho
Escola de Engenharia
Jorge Filipe Bouça Barreira
Deteção das pernas e controlo do andarilho
recorrendo a um sensor laser range finder
DECLARAÇÃO
Nome: Jorge Filipe Bouça Barreira
Endereço eletrónico: a58511@alunos.uminho.pt Telemóvel: 914417270 Número do cartão de cidadão: 13665997
Título da Dissertação: Deteção das pernas e controlo do andarilho recorrendo a um sensor laser
range finder
Orientadora: Professora Doutora Cristina Manuela Peixoto dos Santos
Ano de conclusão: 2014
Designação do Mestrado: Mestrado Integrado em Engenharia Biomédica – Ramo Eletrónica Médica
É AUTORIZADA A REPRODUÇÃO INTEGRAL DESTA DISSERTAÇÃO APENAS PARA EFEITOS DE INVESTIGAÇÃO, MEDIANTE DECLARAÇÃO ESCRITA DO INTERESSADO, QUE A TAL SE COMPROMETE.
Universidade do Minho, ___ /___ /______ Assinatura: _______________________________________________________________
Agradecimentos
Agradecimentos
Um especial agradecimento à minha orientadora, Professora Doutora Cristina Santos, pelo apoio e dedicação prestados ao longo da elaboração desta dissertação.
À Maria Martins, um profundo agradecimento por todo o apoio, disponibilidade, esclarecimento de dúvidas e pela transmissão de conhecimentos.
Sem esquecer a Dra. Catarina Matias e à terapeuta Tânia Pereira do Hospital de Braga, que contribuíram para que fosse possível a realização dos testes com os pacientes.
Aos meus amigos e companheiros de curso um agradecimento especial pela amizade, incentivo e pela certeza que permanecerão na minha vida.
Finalmente, um agradecimento muito especial aos meus pais que desde sempre me guiaram e permitiram que eu chegasse onde cheguei.
Resumo
Resumo
Este trabalho está inserido num projeto do grupo de investigação ASBG (Adaptative System Behavior Group), do CAR (Controlo, Automação e Robótica) do centro de investigação ALGORITMI da Universidade do Minho que consiste no desenvolvimento de um andarilho motorizado como ferramenta de ajuda à reabilitação.
É apresentado o desenvolvimento de um algoritmo de deteção e identificação das pernas utilizando um sensor laser range finder. O algoritmo foi implementado em ambiente Matlab e permite extrair parâmetros da marcha do utilizador. Estes parâmetros foram utilizados num controlo com a finalidade de definir a velocidade e orientação do andarilho.
As provas de validação permitiram demonstrar a eficácia na deteção e identificação das pernas bem como dos parâmetros de marcha que foram calculados. Foram ainda realizados testes em dois pacientes sujeitos a uma artroplastia total do joelho e num paciente diagnosticado com ataxia onde, pela análise dos parâmetros de marcha extraídos, foi possível verificar melhorias no processo de reabilitação dos pacientes.
Abstract
Abstract
The present work is integrated in a project of the research group ASBG (Adaptative System Behavior Group), from CAR (Controlo, Automação e Robótica), from research center ALGORITMI in the University of Minho. It consists on the development of a motorized smartwalker as a tool to improve rehabilitation.
It is presented the development of an algorithm of detection and identification of the patient’s legs using a laser range finder sensor. This algorithm was implemented in Matlab environment and it allows the extraction of parameters of the patient’s gait. These parameters were used in a control as a way to define the speed and orientation of the smartwalker.
The validation tests allowed to demonstrate the efficiency in the detection and identification of the legs, as well as march parameters that were calculated. Tests in two patients who were submitted to a total knee arthroplasty and in a patient diagnosed with ataxia were accomplished. From the analysis of the gait parameters extracted, it was possible to verify significant progress in these patients’ recovery.
Índice
Índice
Agradecimentos ... iii Resumo ... v Abstract ... vii Índice ... ix Índice de Figuras ... xiÍndice de Tabelas ... xiv
Lista de Acrónimos ... xv Capítulo 1 - Introdução ... 1 1.1. Motivação ... 1 1.2. Contexto ... 1 1.3. Objetivos ... 3 1.4. Resultados da dissertação ... 4 1.5. Estrutura da Dissertação ... 4
Capítulo 2 – Estado da arte ... 5
2.1. Técnicas de deteção baseadas em sensores laser range finder ... 5
2.1.1. Deteção geométrica ... 6 2.1.2. Métodos probabilísticos ... 8 Capítulo 3 – Materiais ... 9 3.1. Andarilho ... 9 3.2. Sensor LRF utilizado ... 11 3.3. Potenciómetros ... 12
Índice
Capítulo 4 - Interação entre utilizador e andarilho com base num sensor
LRF e no guiador ... 15
4.1. Deteção das pernas ... 17
4.1.1. Pré-processamento ... 18
4.1.2. Tratamento de marcha normal ... 22
4.1.3. Tratamento de casos especiais ... 24
4.2. Extração de parâmetros de marcha ... 30
4.2.1. Através de dados do sensor LRF ... 30
4.2.2. Através de dados dos potenciómetros ... 35
4.2.3. Outros parâmetros de marcha possíveis de ser extraídos ... 35
4.3. Controlo implementado para o andarilho ... 36
Capítulo 5 – Resultados e discussão ... 39
5.1. Validação dos dados obtidos através do sensor LRF ... 40
5.1.1. Validação da deteção e identificação das pernas ... 41
5.1.2. Validação do comprimento do passo ... 41
5.1.3. Validação do número de passos ... 43
5.1.4. Validação da velocidade média ... 43
5.1.5. Validação do ângulo entre utilizador e andarilho ... 44
5.2. Validação dos dados obtidos através do potenciómetro ... 47
5.2.1. Validação de “φ” com guiador na posição central ... 47
5.2.2. Validação de “φ” com viragem para a esquerda ... 48
5.2.3. Validação de “φ” com viragem para a direita ... 50
5.3. Validação do controlo ... 51
5.4. Resultados para provas de marcha feitas por pacientes ... 52
5.4.1. Pacientes sujeitos a uma artroplastia total do joelho ... 53
5.4.2. Paciente diagnosticado com ataxia ... 58
Capítulo 6 - Conclusões e Trabalho Futuro ... 65
Bibliografia ... 69
Índice
Índice de Figuras
Figura 3.2 – Sensor laser range finder, Hokuyo URG-04LX-UG01 ... 11 Figura 3.3 – Área de varrimento do sensor LRF ... 11 Figura 3.4 – Potenciómetro angular representado no lado esquerdo e potenciómetro linear no lado direito ... 12 Figura 4.1 – Bloco de diagramas do controlo implementado. ... 16 Figura 4.2 - Modelo da interação entre o utilizador (representado pelas pernas P1 e P2) e o andarilho. ... 16 Figura 4.3 - Exemplo de um varrimento de uma aquisição laser. ... 18 Figura 4.4 – Representação da área de interesse, a vermelho, num varrimento
laser... 19 Figura 4.5 - A) Representação da limitação da distância, a vermelho, num varrimento laser. B) Limitação da distância aplicada ao varrimento da Figura 4.3. ... 20 Figura 4.6 - A) Representação da limitação angular, a vermelho, num varrimento laser. B) Limitação angular aplicada ao varrimento da Figura 4.3. ... 21 Figura 4.7 - Resultado do pré-processamento aplicado ao varrimento da Figura 4.3... 21 Figura 4.8 – Fluxograma do tratamento de marcha normal ... 23 Figura 4.9 – Exemplo de identificação das pernas com dados de um varrimento laser. ... 24 Figura 4.10 A) Aquisição onde as pernas estavam colocadas lado a lado e B) uma avançada em relação à outra. ... 25 Figura 4.11 – Exemplo de aquisições onde A) as pernas têm aproximadamente o mesmo número de pontos e B) onde existe uma grande discrepância entre os números de pontos das duas pernas ... 26 Figura 4.12 – Exemplos de aquisição onde ocorre sobreposição e A) os pontos pertencentes a ambas as pernas estão perfeitamente separados e B) são detetados pontos entre as duas pernas. ... 27 Figura 4.13 - Fluxograma para casos onde a maior diferença entre pontos adjacentes é superior ao threshold. ... 28
Índice
Figura 4.14 – Exemplo de aquisição laser onde ocorre sobreposição com as pernas colocadas praticamente lado a lado. ... 29 Figura 4.15 - Fluxograma para casos onde a maior diferença entre pontos adjacentes é menor ao threshold. ... 30 Figura 4.16 – Gráfico com a diferença entre as distâncias do ponto médio da perna direita e da perna esquerda. Os picos do gráfico estão representados pelos pontos a vermelho. ... 32 Figura 4.17 – Gráfico representativo das distâncias do ponto médio da perna esquerda, a azul, e da perna direito, a vermelho. ... 36 Figura 5.1 – Gráficos com a diferença entre as distâncias dos pontos médios das duas pernas e representação a vermelho dos picos da função. Em A) para o primeiro teste e B) para o segundo teste. Em x, o número de varrimentos e em y o valor da distância lido pelo laser. ... 41 Figura 5.2 – Variação do ângulo da perna relativamente ao pé quando este se encontra em contato com o chão. A diferença das distâncias lidas pelo sensor laser foram de 7cm. ... 42 Figura 5.3 - Velocidade em cada passada A) na primeira aquisição e B) na segunda aquisição. Em x o número de passos e em y a velocidade obtida. ... 44 Figura 5.4 – Esquema da posição das pernas para validação do ângulo entre utilizador e andarilho. ... 45 Figura 5.5 – Ângulo obtido experimentalmente entre a perna esquerda e o andarilho (linha azul); entre a perna direita e o andarilho (linha a vermelho); ângulo entre o utilizador e o andarilho (linha a verde). Em x estão representados os varrimentos laser e, em y, o valor do ângulo obtido. ... 46 Figura 5.6 – Ângulo extraído do potenciómetro com guiador na posição central. No eixo das abcissas estão representados os varrimentos laser e nas ordenadas o ângulo φ. ... 48 Figura 5.7 – Valor de “φ” e “θ” com viragem para a esquerda em A) e B), respectivamente. Em x estão representados os varrimentos laser e, em y, os valores dos ângulos obtidos. ... 49 Figura 5.8 - Valor de “φ” em A e valor de “θ” em B com viragem para a direita. Em x estão representados os varrimentos laser e, em y, os valores dos ângulos obtidos. ... 50 Figura 5.9 – Valor experimental de “Vr” em A) e valor experimental de “Wr” em B) ... 52
Índice Figura 5.10 - Distância de cada perna do paciente, a azul a perna esquerda e a vermelho a perna direita, ao andarilho. Em A) 3 a 5 dias após a cirurgia e em B) 15 dias após a mesma. Em cima, gráficos A e B, para o paciente 1 e em baixo, gráficos C e D, para o paciente 2. ... 53 Figura 5.11 - Distância do paciente ao andarilho. Em A) 3 a 5 dias após a cirurgia e em B) 15 dias após a mesma. Em cima, gráficos A e B, para o paciente 1 e em baixo, gráficos C e D, para o paciente 2. ... 54 Figura 5.12 - Velocidade do paciente 2. Em A) 3 a 5 dias após a cirurgia e em B) 15 dias após a mesma. Em cima, gráficos A e B, para o paciente 1 e em baixo, gráficos C e D, para o paciente 2. ... 55 Figura 5.13 - Ângulo entre o paciente e o andarilho. Em A) 3 a 5 dias após a cirurgia e em B) 15 dias após a mesma. Em cima, gráficos A e B, para o paciente 1 e em baixo, gráficos C e D, para o paciente 2. ... 56 Figura 5.14 - Comprimento do passo do paciente. Em A) 3 a 5 dias após a cirurgia e em B) 15 dias após a mesma. Em cima, gráficos A e B, para o paciente 1 e em baixo, gráficos C e D, para o paciente 2. ... 57 Figura 5.15 – Distância de cada perna do paciente, a azul a perna esquerda e a vermelho a perna direita, ao andarilho. Em três momentos distintos: A), B) e C). ... 58 Figura 5.16 - Distância do paciente ao andarilho. Em três momentos distintos: A), B) e C). ... 59 Figura 5.17 - Velocidade do paciente em três momentos distintos: A), B) e C). ... 60
Figura 5.18 - Ângulo entre o paciente e o andarilho em três momentos distintos: A), B) e C). ... 61 Figura 5.19 – Comprimento do passo do paciente em três momentos distintos: A), B) e C). ... 62 Figura AII.6.1 – Circuito de leitura do potenciómetro ... 74
Índice
Índice de Tabelas
Lista de Acrónimos
Lista de Acrónimos
ADC – Analog-to-Digital Converter LRF – Laser Range Finder
MHT – Multiple Hypothesis Tracker
ASBGo – Adaptative System Behavior Group mm – milímetros
USB – Universal Serial Bus cm – centímetros
m – metros
m/s – metros por segundo cm/s – centímetros por segundo Kg – quilograma DC – corrente contínua V – Volts nF – nanofaraday ms – milisegundos nm – nanómetros
Capítulo 1 Introdução
Capítulo 1 - Introdução
1.1.Motivação
A marcha humana é um mecanismo essencial à autonomia e qualidade de vida de qualquer pessoa [1]. Sendo evidente que vivemos numa sociedade cada vez mais envelhecida e com um crescente aumento de pessoas portadoras de algum tipo de incapacidade motora, torna-se imperativo o desenvolvimento de mecanismos capazes de auxiliar pessoas cuja mobilidade tenha sido afetada.
Entre os mecanismos de reabilitação existentes, a mais recente aposta tem sido feita nos andarilhos que, quando incorporados com diferentes tipos de sensores conferem ao utilizador, entre outras vantagens, uma maior estabilidade, segurança e autonomia o que os torna excelentes ferramentas de apoio à marcha e reabilitação.
1.2.Contexto
Com o desenvolvimento da ciência e tecnologia, a esperança média de vida da população tem vindo a aumentar significativamente nas ultimas décadas. Este fator aliado a uma melhoria das condições de vida, levou a um aumento da população mais
Capítulo 1 Introdução
idosa, tornando este índice demográfico um dos aspetos mais preocupantes nas sociedades modernas [2].
Devido aos problemas que surgem com o avanço da idade, as pessoas idosas são mais suscetíveis a quedas tornando-as mais vulneráveis a fraturas ósseas. As consequências que resultam deste tipo de acidentes incluem perdas de mobilidade, autonomia e, ainda, sintomas depressivos [3].
Entre as atividades do quotidiano, caminhar constitui uma das funções mais básicas e fundamentais para qualquer pessoa. Caso esta função seja afetada, a qualidade de vida e autonomia é colocada em risco [4]. Deste modo, tornou-se imperativa a procura de dispositivos e estratégias capazes de prevenir, compensar e até restaurar a capacidade motora.
Mediante o tipo de incapacidade motora, são aplicadas diferentes abordagens no que toca à reabilitação. As soluções disponíveis passam pela utilização de cadeiras de rodas, bengalas, moletas, próteses, ortóteses e andarilhos. Para os casos de total incapacidade de locomoção, os andarilhos e cadeiras de rodas são os dipositivos de eleição. A utilização prolongada de cadeira de rodas acarreta problemas de saúde para o utilizador, maioritariamente por se encontrarem sentados durante longos períodos de tempo. Pode-se incluir, por exemplo, o aparecimento de úlceras de pressão, osteoporose e problemas de circulação.
Neste contexto, os andarilhos assumem um papel importante no auxílio da marcha. Graças ao seu suporte para membros superiores, é possível manter uma postura estável e reduzir a pressão exercida nos membros inferiores [5]. Os andarilhos recorrem à capacidade motora do utilizador para se movimentarem, evitando assim problemas que possam advir da não utilização das pernas.
Contudo, andarilhos convencionais requerem o cuidado por parte do utilizador em manter uma certa distância ao mesmo, pois podem desencadear desequilíbrios, o que levanta problemas relacionados com a sua segurança [6].
Estas questões levaram à incorporação de sensores nos andarilhos, permitindo a identificação de intenções de movimento, o controlo da velocidade e direção do andarilho, bem como a sua distância ao utilizador.
Os sensores LRF (laser Range Finder) são uma peça importante na deteção de pernas. Ao contrário de outros tipos de sensores, como por exemplo sensores de imagem, os sensores LRF apresentam um comportamento bastante robusto na variação da luminosidade e o processamento requerido é muito reduzido [7].
Capítulo 1 Introdução Este tipo de sensores também não necessita de quaisquer tipos de marcadores no corpo, pode ser utilizado tanto no interior como no exterior e em qualquer tipo de superfície. Não requer calibração ou utilização de escalas de referência, possuindo ainda uma elevada precisão e uma vasta área de aquisição [7].
É neste sentido que se enquadra o trabalho proposto. Pretende-se estudar e analisar os parâmetros de interação entre o utilizador e o andarilho através de um sensor LRF para deteção das pernas e, assim, auferir a velocidade e posição do utilizador.
Desenvolveu-se um algoritmo de deteção que foi testado com um andarilho inteligente no Hospital de Braga em pacientes diagnosticados com osteoartrose no joelho e sujeitos à cirurgia de artroplastia total do joelho.
Numa primeira fase o andarilho foi testado 3 a 5 dias após a intervenção cirúrgica e, numa segunda fase, 15 dias após a cirurgia, aos mesmos pacientes.
Os parâmetros obtidos com o sensor LRF, juntamente com dados obtidos pelos potenciómetros do guiador, permitiram a implementação de um controlo para o andarilho capaz de controlar a sua velocidade e orientação.
1.3.Objetivos
Esta dissertação de mestrado tem como objetivos:
• Implementação de um algoritmo de deteção e identificação das pernas com dados obtidos de um sensor LRF instalado no andarilho.
• Determinação de parâmetros da marcha partindo da análise dos varrimentos laser.
• Elaboração dos testes necessários para validar o algoritmo implementado e os parâmetros de marcha extraídos.
• Implementação de um controlo para o andarilho capaz de controlar a sua velocidade e orientação.
• Análise a pacientes diagnosticados com ataxia e pacientes submetidos a uma artroplastia total do joelho.
Capítulo 1 Introdução
1.4.Resultados da dissertação
Foi desenvolvido e implementado um algoritmo capaz de detetar e identificar corretamente as pernas do utilizador. Foram extraídos os parâmetros necessários à caraterização da marcha e implementada uma estratégia de controlo para o andarilho. Foi ainda feita uma avaliação da evolução da marcha a dois pacientes sujeitos a uma artroplastia total do joelho e a um paciente diagnosticado com ataxia.
1.5.Estrutura da Dissertação
A presente dissertação encontra-se organizada da seguinte forma: no Capítulo 2 são apresentados alguns dos principais trabalhos na área de deteção e seguimento de pessoas que utilizam sensores LRF. No Capítulo 3 é descrito o andarilho utilizado e explicado o modo de funcionamento dos sensores. O algoritmo implementado é descrito no Capítulo 4, bem como a estratégia de controlo seguida. É igualmente abordada a forma como são calculados os parâmetros de marcha e tratados os dados do potenciómetro. No Capítulo 5 é feita a validação da deteção e identificação das pernas e de todos os parâmetros calculados, sendo que no fim são apresentados os resultados para provas de marcha feitas por pacientes no Hospital de Braga. As conclusões e contribuições desta dissertação são apresentadas no Capítulo 6, revelando possíveis áreas de interesse para trabalho futuro.
Capítulo 2 Estado da arte
Capítulo 2 – Estado da arte
Neste capítulo são referenciadas diferentes técnicas de deteção de pernas, mais concretamente técnicas baseadas em sensores LRF. Na literatura são descritos vários trabalhos cuja abordagem consiste na utilização de mais do que um sensor LRF. Normalmente este tipo de abordagens utiliza um sensor para detetar as pernas e outro para detetar a região do torso. O intuito desta utilização consiste na posterior correspondência entre as pernas e a pessoa em ambientes onde são detetadas simultaneamente várias pessoas [8] [9] [10]. Nesta dissertação somente foi utilizado um sensor LRF, pelo que o foco deste capítulo será em trabalhos que utilizam igualmente um sensor para deteção.
2.1.Técnicas de deteção baseadas em sensores laser range
finder
Atualmente, as abordagens de deteção podem ser divididas em duas principais categorias: métodos probabilísticos e métodos de deteção geométrica.
Capítulo 2 Estado da arte
2.1.1.Deteção geométrica
Os métodos de deteção geométrica são mais simples, rápidos e requerem menor processamento computacional. O pressuposto deste tipo de métodos assenta no fato de as pernas humanas, quando detetadas por um sensor LRF, se assemelharem a uma forma geométrica. Assim, é criado um modelo de uma forma geométrica e é feita, posteriormente, a correspondência entre o modelo e os objetos detetados pelo
laser, por forma a identificar as pernas[11] [12].
De entre os trabalhos de perceção geométrica para deteção de pernas, o trabalho desenvolvido por Xavier et al. [11] é dos que apresenta maior relevo na literatura.
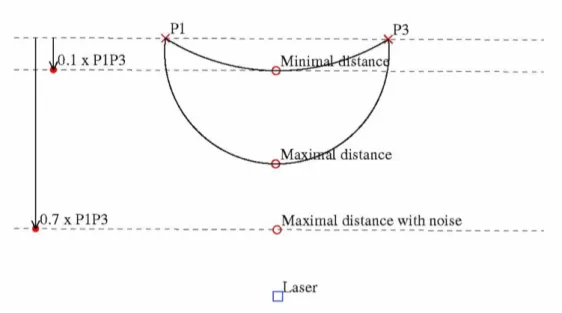
Neste trabalho, a perna é assumida como tendo uma forma compreendida entre um círculo e uma elipse. Para a deteção foi utilizada uma técnica intitulada pelos autores de Inscribed Angle Variance. Esta técnica tira partido de uma propriedade trigonométrica dos arcos que indica que todos os pontos de um arco possuem o mesmo ângulo relativamente aos dois extremos do arco (Figura 2.1). Com este método os autores fazem a distinção entre pernas, arcos e linhas.
Neste trabalho, os pontos são considerados como pertencentes a um círculo quando o desvio padrão dos ângulos obtidos é inferior a 8.6º e a sua média está compreendida entre 90º e 135º. Para além disto, o círculo tem que respeitar uma condição geométrica em que o ponto central do segmento tem que estar dentro de
Capítulo 2 Estado da arte uma área delimitada por duas linhas paralelas, definida pelos autores. O ponto terá que estar compreendido entre:
0.1i d(P1, P3) < x < 0.7 i d(P1, P3)
Equação 2.1
Onde na Equação 2.1, “x” representa o ponto central do segmento.
A deteção de pernas é feita com uma pequena variação à deteção de círculos, onde neste caso é acrescentada uma restrição: a distância entre os dois pontos extremos, representados na Figura 2.2 por “P1” e “P3”, terá que estar compreendida entre 0,1 e 0,25 metros.
O maior problema deste tipo de abordagens é que não existe adaptação a várias formas de pernas. O vestuário em si afeta a forma como a perna será detetada pelo laser, comprometendo os resultados obtidos, o que para esta dissertação se torna crucial.
Capítulo 2 Estado da arte
2.1.2.Métodos probabilísticos
Este tipo de abordagem é baseada em modelos que extraem regiões em movimento através de filtros, como é o caso de particle filters, filtros de Kalman, entre outros. Grande parte dos trabalhos nesta vertente utilizam, como forma de deteção e seguimento das pessoas, uma abordagem de hipóteses múltiplas (multiple
hypothesis). O movimento da pessoa é representado por um modelo dinâmico que tem
em conta parâmetros físicos da marcha, sendo a deteção consumada através de medições por associação de dados e conjuntos de hipóteses [13] [14] [15] [16].
No trabalho desenvolvido por Arras et al. [16], é utilizada uma aproximação a um filtro de Kalman para detetar e acompanhar o movimento das pernas.
Os autores, na fase de previsão do estado, para prever o movimento, utilizaram um modelo de velocidade constante. Por sua vez, na fase de observação/medição, utilizaram um classificador AdaBoost para detetar pessoas na aquisição laser. Este classificador, na fase de aprendizagem, recebe um conjunto de dados de treino e caraterísticas da marcha, sendo depois criado um classificador que se adequa melhor aos dados de treino, tendo por base as caraterísticas que foram introduzidas.
Neste trabalho, uma abordagem MHT (Multiple Hypothesis Tracker) foi implementada para fazer a associação de dados no contexto do seguimento da pessoa. Foram criados marcadores que estão associados às deteções do laser e, sempre que ocorre uma nova deteção, esta pode ser associada a um marcador existente, servir de base na criação de um novo marcador ou ser considerada como falso alarme.
Foram definidos conjuntos de diferentes hipóteses de associação para os próximos varrimentos, permitindo assim fazer o seguimento do movimento da pessoa. Foram definidas condições essenciais como base para o tratamento de problemas de oclusão e seguimento de pessoas: estas têm sempre duas pernas e estão próximas uma da outra e as pernas movem-se na mesma direção e têm maior probabilidade de se ocultarem uma à outra do que serem ocultadas por outros objetos ou outras pessoas. Os autores apresentam ainda uma adaptação à probabilidade de oclusão como forma de tratamento dos casos de oclusão.
Capítulo 3 Materiais
Capítulo 3 – Materiais
Neste capítulo será descrito o andarilho utilizado, tendo como principal foco o tipo de sensores incluídos e os diferentes modos de funcionamento. Dos sensores que fazem parte do andarilho serão aprofundados aqueles cujos dados serão utilizados nesta dissertação, o sensor LRF e o potenciómetro.
3.1. Andarilho
Neste projeto utilizou-se o andarilho ASBGo, um andarilho desenvolvido no âmbito do projeto de doutoramento de uma investigadora da Universidade do Minho [17]. Este andarilho teve protótipos diferentes, sendo que o trabalho desta dissertação incidiu nos protótipos dois e três que se encontram representados na Figura 3.1.
Capítulo 3 Materiais
O andarilho mais recente tem incorporados sensores de ultrassom e encoders que permitem a deteção de obstáculos e recolha de informação relativa à distância percorrida pelo andarilho. Esta informação sensorial é utilizada pelo controlador, que define os comandos dos atuadores.
Este andarilho possui quatro modos de funcionamento: autónomo, semi-autónomo, manual e controlo remoto. Em modo semi-autónomo, o andarilho desloca-se para uma posição alvo definida pelo utilizador evitando todos os obstáculos detetados durante o percurso; no modo manual, o utilizador por si próprio controla o andarilho através do guiador; em modo semi-autónomo, o utilizador controla o andarilho, porém este é avisado através de sinais luminosos da presença de obstáculos, e, por fim, o modo de controlo remoto permite que o andarilho seja controlado à distância.
Estes diferentes modos de operação permitem que o andarilho se adapte a vários tipos de reabilitação consoante as dificuldades sentidas pelo paciente.
Figura 3.1 – Andarilhos ASBGo 2 no lado esquerdo e ASBGo 3 no lado direito
Capítulo 3 Materiais
3.2. Sensor LRF utilizado
Para a detecção dos membros inferiores utilizou-se o scanning laser range
finder da Hokuyo com a referência URG-04LX-UG01 (Figura 3.2).
Figura 3.2 – Sensor laser range finder, Hokuyo URG-04LX-UG01
Este sensor, alimentado por USB, fornece informações relativas à distância, em mm, ao longo de um plano horizontal. A área de aquisição consiste num semicírculo de 240º com um raio máximo de 4000mm. Num varrimento completo são adquiridos 682 pontos com uma resolução angular de aproximadamente 0,36º.
Figura 3.3 – Área de varrimento do sensor LRF
Capítulo 3 Materiais
Durante a marcha, os pés erguem-se alguns centímetros acima do solo. Deste modo, por forma a garantir uma deteção contínua das pernas, o sensor foi colocado 30 centímetros (cm) acima do solo e paralelo a este.
3.3. Potenciómetros
Os potenciómetros consistem em sensores resistivos cujo movimento causa uma variação no valor da resistência. O tipo de movimento responsável pela variação define a sua categoria, podendo estes ser categorizados como lineares ou angulares.
O andarilho utilizado tem dois potenciómetros, um de cada tipo (Figura 3.4), instalados no guiador. Estes permitem definir a velocidade angular e linear do andarilho. Movimentos para a frente e para trás no guiador refletem movimentos de rotação no potenciómetro, que traduzem a velocidade linear máxima e mínima. Por sua vez, movimentos lineares entre o lado esquerdo e direito, traduzem a velocidade angular indicando a direção desejada para o andarilho.
Figura 3.4 – Potenciómetro angular representado no lado esquerdo e potenciómetro linear no lado direito
Nesta dissertação, utilizaram-se os dados do potenciómetro linear, referente à velocidade angular do andarilho, como variável de entrada do controlo implementado.
Capítulo 3 Materiais O potenciómetro apresenta um valor de 10KΩ e encontra-se ligado a um circuito com um divisor de tensão (Anexo II) cujo sinal resultante é lido pelo
Analog-to-digital converter (ADC) do microcontrolador.
Os valores finais referentes à velocidade angular do andarilho apresentam uma gama de variação entre 132 e 258.
Capítulo 4 Interação entre utilizador e o andarilho com base num sensor LRF e no guiador
Capítulo 4 - Interação entre utilizador e
andarilho com base num sensor LRF e no
guiador
Neste capítulo, serão apresentados o algoritmo de deteção das pernas desenvolvido e os parâmetros de marcha que foram considerados para análise. O objetivo da deteção e identificação das pernas, é a definição dos parâmetros de marcha do utilizador, partindo da informação do sensor LRF, que, juntamente com dados do potenciómetro do guiador do andarilho, servirão de base a um controlo por forma a definir a velocidade e orientação do andarilho.
Capítulo 4 Interação entre utilizador e o andarilho com base num sensor LRF e no guiador
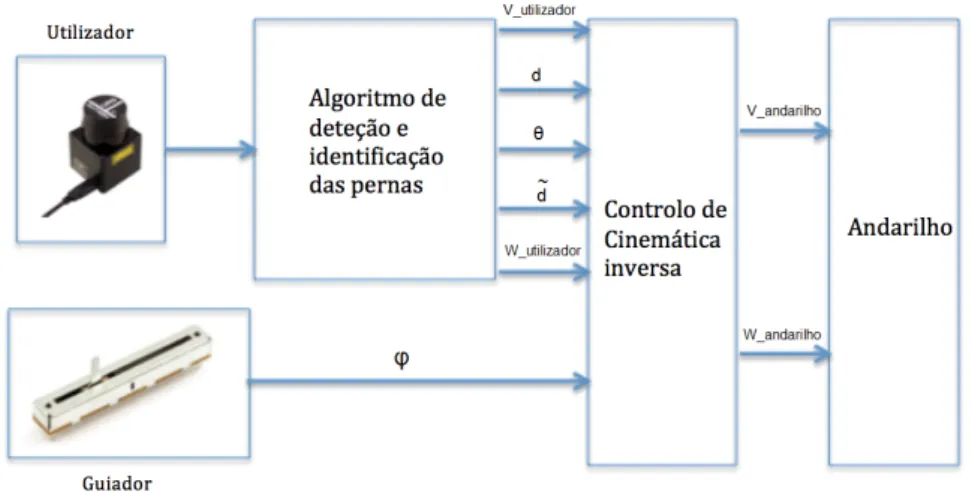
Figura 4.1 – Bloco de diagramas do controlo implementado.
Após a identificação das pernas, são extraídas a velocidade linear (“V_uti”) e angular do utilizador (“W_uti”), a sua distância ao andarilho (“d”) e o ângulo deste relativamente ao sensor LRF (“θ”). O valor da distância “
d
~” corresponde à diferençaentre a distância medida pelo sensor laser (“d”) e o valor predefinido para a distância entre o utilizador e o andarilho (“dd”). Através do potenciómetro linear colocado no guiador, é definido o ângulo de viragem do andarilho(“φ”).
Figura 4.2 - Modelo da interação entre o utilizador (representado pelas pernas P1 e P2) e o andarilho.
Posteriormente, através de um controlo de cinemática inversa, são calculadas a velocidade linear (“V_andarilho”) e angular (“W_andarilho”) do andarilho com o
Capítulo 4 Interação entre utilizador e o andarilho com base num sensor LRF e no guiador objectivo de manter o utilizador centrado com o andarilho (θ=90º) e a distância entre ambos (“d”) igual a uma distância previamente definida (“dd”).
4.1. Deteção das pernas
Para a deteção e identificação das pernas, desenvolveu-se um novo algoritmo com a finalidade de ser simples, eficiente e eficaz.
O algoritmo implementado pode ser dividido em: • Pré-processamento.
• Tratamento em marcha normal • Tratamento dos casos especiais.
Na Figura 4.3 está representado um exemplo de varrimento sem qualquer tipo de tratamento. Como é possível verificar, na aquisição aparecem muitos artefactos devido à grande área de varrimento do sensor laser. Para isolar as pernas, é realizado um pré-processamento com vista a limitar tanto a distância como os ângulos do varrimento.
Posteriormente a esse processamento é feito um tratamento para o caso de uma marcha normal, isto é, com as pernas perfeitamente afastadas. Por fim, são tratados os casos de oclusão de uma das pernas.
Capítulo 4 Interação entre utilizador e o andarilho com base num sensor LRF e no guiador
Figura 4.3 - Exemplo de um varrimento de uma aquisição laser.
4.1.1.Pré-processamento
O intuito da limitação da área é centrar a aquisição no espaço onde se encontra o utilizador, que corresponde ao espaço compreendido entre as duas rodas do andarilho.
A limitação, em distância e angular, teve que ser cuidadosamente escolhida, pois é necessário garantir que não se remove pontos correspondentes às pernas do utilizador.
Devido à variabilidade da marcha de pessoa para pessoa, os parâmetros de limitação escolhidos podem funcionar para um determinado grupo de utilizadores, contudo podem omitir pontos das pernas de outros. É necessário ter em consideração que os utilizadores podem caminhar próximos ou afastados do andarilho, bem como podem não se encontrar centrados em relação a este.
Na Figura 4.4 está representada de uma forma simplista o resultado final que se pretende com o pré-processamento, estando a região de interesse representada a vermelho.
Capítulo 4 Interação entre utilizador e o andarilho com base num sensor LRF e no guiador
Figura 4.4 – Representação da área de interesse, a vermelho, num varrimento laser.
! Limitação da distância
Atendendo à estrutura do andarilho, com o seu suporte de antebraço e guiador, este não permite que o utilizador numa marcha normal, sem qualquer percalço, se aproxime demasiado ou se afaste do andarilho. Com isto, a distância da área de interesse foi limitada entre 0,1 e 0,8 metros. Na Figura 4.5 está representado o resultado ilustrativo (A) bem como a aplicação desta limitação à aquisição da Figura 4.3 (B).
Capítulo 4 Interação entre utilizador e o andarilho com base num sensor LRF e no guiador
Figura 4.5 - A) Representação da limitação da distância, a vermelho, num varrimento laser. B) Limitação da distância aplicada ao varrimento da Figura 4.3.
! Limitação angular
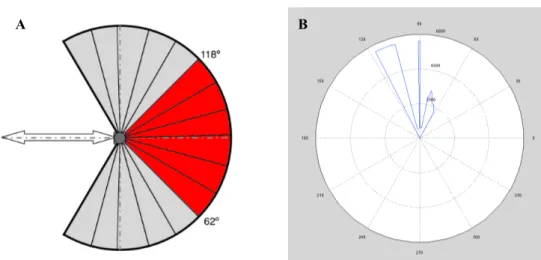
Após medições do ângulo entre o sensor e as extremidades do andarilho, limitou-se a aquisição entre 62º e 118º. Assim, delimitou-se uma área de 28º do centro para a esquerda do sensor e de 28º do centro para a direita, perfazendo um total de 56º. Com esta limitação obtém-se o resultado A) da Figura 4.6. Aplicando a limitação angular ao varrimento da Figura 4.3, tem-se como resultado a imagem B) da Figura 4.6.
Capítulo 4 Interação entre utilizador e o andarilho com base num sensor LRF e no guiador
Figura 4.6 - A) Representação da limitação angular, a vermelho, num varrimento laser. B) Limitação angular aplicada ao varrimento da Figura 4.3.
O resultado final do pré-processamento está representado na Figura 4.7.
O pré-processamento foi aplicado ao mesmo varrimento que foi considerado nos casos anteriores. É possível verificar que através da junção das duas limitações é possível isolar perfeitamente as pernas dos restantes objetos existentes na aquisição
laser.
Figura 4.7 - Resultado do pré-processamento aplicado ao varrimento da Figura 4.3.
Capítulo 4 Interação entre utilizador e o andarilho com base num sensor LRF e no guiador
4.1.2. Tratamento de marcha normal
Como já se referiu, foi considerada como marcha normal, uma marcha onde as pernas se encontram perfeitamente afastadas.
Neste tipo de casos, a separação entre perna direita e esquerda é feita atendendo aos seguintes fatores:
• Como o input para este tratamento são dados provenientes do pré-processamento apresentado em 4.1.1, tem-se que os únicos objetos a ser analisados correspondem às pernas.
• Durante um varrimento ambas as pernas são detetadas continuamente, não existindo leituras provenientes do laser a “0” enquanto se percorre cada perna.
• Entre cada perna são obtidas leituras a “0” pois neste tipo de marcha as pernas encontram-se perfeitamente afastadas.
Tendo estes pontos como base, o algoritmo implementado para deteção e identificação das pernas pode ser traduzido por:
• Percorrendo cada varrimento, a primeira leitura diferente de “0” por parte do sensor corresponde à perna esquerda do utilizador.
• Todos os pontos detetados, partindo da primeira leitura diferente de “0”, até se obter novamente uma leitura a “0”, são todos pontos pertencentes à perna esquerda.
• Os próximos pontos cujo valor é “0”, correspondem ao espaço vazio entre as duas pernas.
• Após este espaço vazio, o próximo ponto diferente de ”0” corresponde à primeira leitura da perna direita.
• Todos os pontos que se seguem a este, até se obter novamente uma leitura a “0”, são pontos pertencentes à perna direita.
Capítulo 4 Interação entre utilizador e o andarilho com base num sensor LRF e no guiador
Figura 4.8 – Fluxograma do tratamento de marcha normal
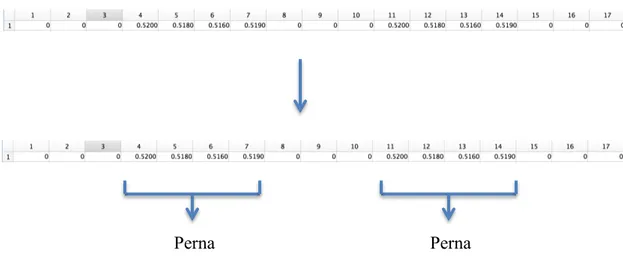
Encontra-se representado, na parte superior da Figura 4.9, um varrimento
laser. Aplicando o algoritmo acima descrito, o primeiro ponto diferente de “0” que se
Percorrer Varrimento
Leitura ≠ 0
Perna esquerda
Leitura = 0
Espaço vazio entre as duas pernas Valor ≠ 0 Perna direita Valor = 0 Espaço vazio Não Sim
Não Percorrer varrimento
Sim
Não Percorrer varrimento
Sim
Percorrer varrimento Não
Capítulo 4 Interação entre utilizador e o andarilho com base num sensor LRF e no guiador
de se obter novamente um “0” na leitura) são todos pontos pertencentes à perna esquerda. Continuando a análise, o seguinte ponto diferente de “0” encontra-se na posição 11, sendo que este e todos os pontos até à posição 14 são pontos correspondentes à perna direita.
Figura 4.9 – Exemplo de identificação das pernas com dados de um varrimento laser.
4.1.3. Tratamento de casos especiais
São considerados como especiais, os casos onde na aquisição laser não existem pontos nulos a separar as duas pernas. Estes ocorrem quando existe sobreposição de uma das pernas ou quando estas estão juntas lado a lado. Estas particularidades ao serem analisadas pelo algoritmo apresentado em 4.1.2, este vai assumir que todos os pontos do varrimento pertencem à mesma perna, quando na realidade estão as duas pernas na leitura.
Assim, o fato de só estar a ser detetada uma perna, é considerado o ponto de partida para se assumir que se está perante um caso especial da marcha.
Os casos especiais foram agrupados em dois grupos onde são tratados separadamente. O objetivo é separar os casos onde as pernas estão praticamente lado a lado dos casos onde uma perna se encontra avançada em relação à outra (Figura 4.10).
Perna esquerda
Perna direita
Capítulo 4 Interação entre utilizador e o andarilho com base num sensor LRF e no guiador
Figura 4.10 A) Aquisição onde as pernas estavam colocadas lado a lado e B) uma avançada em relação à outra.
Esta separação é feita tendo em conta a diferença entre pontos adjacentes no mesmo varrimento laser.
Assim, escolheu-se como threshold um valor de 0.04 metros. Este threshold é comparado com a maior diferença verificada entre pontos adjacentes do varrimento. Caso a diferença seja superior ao threshold trata-se de um caso onde uma perna está avançada em relação à outra, por outro lado, caso seja inferior, trata-se de um caso onde as pernas se encontram lado a lado. Porém não foram considerados todos os pontos para esta comparação. Foram escolhidos somente os 40 pontos centrais. Esta escolha tinha que garantir que se estava a incluir a zona de transição da perna esquerda para a perna direita e restringir a análise a uma pequena janela por forma a evitar possíveis interferências do vestuário na deteção da zona de transição.
Todavia, a margem teve que ser consideravelmente ampla pois podem existir casos onde aparentemente as duas pernas têm o mesmo número de pontos, Figura 4.11 A), fazendo quase coincidir o ponto central com a zona de transição, mas também podem existir casos de maior sobreposição onde uma das pernas tem mais pontos que a outra, Figura 4.11 B) fazendo com que a zona de transição se afaste mais do ponto central.
Capítulo 4 Interação entre utilizador e o andarilho com base num sensor LRF e no guiador
Figura 4.11 – Exemplo de aquisições onde A) as pernas têm aproximadamente o mesmo número de pontos e B) onde existe uma grande discrepância entre os números de pontos das duas pernas
• Casos onde a maior diferença entre pontos adjacentes é superior ao
threshold
Neste tipo de casos estão incluídos os casos de sobreposição quando uma das pernas está avançada em relação à outra.
Através da análise de dados deste tipo de sobreposição, podem surgir dois tipos de leituras: a leitura representada na Figura 4.12 A), onde os pontos pertencentes a cada uma das pernas se encontram perfeitamente separados, e no caso da Figura 4.12 b), onde devido à resolução do sensor LRF podem aparecer um ou mais pontos intermédios entre as duas pernas.
Capítulo 4 Interação entre utilizador e o andarilho com base num sensor LRF e no guiador
Figura 4.12 – Exemplos de aquisição onde ocorre sobreposição e A) os pontos pertencentes a ambas as pernas estão perfeitamente separados e B) são detetados pontos entre as duas pernas.
Em ambos os casos, a zona de transição entre pernas é verificada no ponto onde é maior a diferença entre os pontos adjacentes. Assim, o algoritmo implementado para este caso começa por calcular as diferenças entre os 40 pontos centrais e, onde essa diferença for máxima, faz-se a separação entre perna esquerda e perna direita.
Partindo do primeiro ponto da perna detetada, através do tratamento de marcha normal, até ao ponto onde se verificou a maior diferença entre pontos adjacentes, são pontos pertencentes à perna esquerda. Por sua vez, pertencem à perna direita todos os pontos partindo do ponto imediatamente após ao ponto onde se verifica a maior diferença, até ao último ponto da perna detetada.
Capítulo 4 Interação entre utilizador e o andarilho com base num sensor LRF e no guiador
Figura 4.13 - Fluxograma para casos onde a maior diferença entre pontos adjacentes é superior ao
threshold.
Para o caso em que se tem os pontos isolados entre as duas pernas, é indiferente eles pertencerem a uma perna ou a outra pois a sua influência é muito reduzida. Em certos casos, por exemplo o que se encontra representado na Figura 4.12 B), não se sabe a que perna poderá pertencer o ponto. Uma justificação para o aparecimento destes pode residir no vestuário da pessoa.
• Casos onde a maior diferença entre pontos adjacentes é inferior ao
threshold
Nesta análise estão incluídos os casos onde as pernas estão praticamente lado a lado uma com a outra. Na Figura 4.14 está representado um exemplo deste tipo de casos.
Perna detetada
40 pontos centrais
Diferenças entre pontos adjacentes
Perna esquerda = perna detetada(1)
: perna detetada(diferença máxima) detetada(diferença máxima + 1) : Perna direita = perna perna detetada(end)
Capítulo 4 Interação entre utilizador e o andarilho com base num sensor LRF e no guiador
Figura 4.14 – Exemplo de aquisição laser onde ocorre sobreposição com as pernas colocadas praticamente lado a lado.
Neste caso, verifica-se uma particularidade, nomeadamente a forma em “W” das pernas no varrimento, o que se torna interessante pois leva à existência de um pico na zona de transição de pernas que corresponde à zona de separação entre perna esquerda e perna direita.
Deste modo, para identificar as pernas, restringiu-se a análise aos pontos centrais, mais concretamente aos 20 pontos centrais. Neste tipo de casos, o ponto central coincide praticamente com a zona de transição da perna esquerda para a perna direita o que permite diminuir a janela de análise para os 20 pontos.
De seguida, seleciona-se o ponto cuja distância lida pelo laser é maior, sendo que este ponto corresponde ao pico onde se verifica a transição entre pernas, fazendo-se deste modo a fazendo-separação entre perna esquerda e perna direita.
Partindo do primeiro ponto da perna detetada, através do tratamento de marcha normal, até ao ponto onde se verificou a maior valor lido pelo laser, são pontos pertencentes à perna esquerda. Por sua vez, pertencem à perna direita todos os pontos partindo do ponto imediatamente após ao ponto onde se verifica o maior valor lido pelo laser, até ao último ponto da perna detetada.
Neste tipo de casos a janela não poderia ser muito abrangente uma vez que nas extremidades os pontos apresentam uma maior distância ao laser quando comparados com a zona de transição, fazendo variar a zona onde esta iria ser detetada pelo
Capítulo 4 Interação entre utilizador e o andarilho com base num sensor LRF e no guiador
Figura 4.15 - Fluxograma para casos onde a maior diferença entre pontos adjacentes é menor ao
threshold.
4.2.Extração de parâmetros de marcha
4.2.1.Através de dados do sensor LRF
Nesta fase tornou-se necessário definir um ponto que pudesse servir como referência de cada uma das pernas, pelo que, a escolha recaiu no ponto médio de cada perna. Atribuiu-se “pm_esq” para o ponto médio referente à perna esquerda e “pm_dir” para a perna direita.
Uma outra alternativa passava por escolher o ponto cuja distância ao laser fosse menor, pois este seria o ponto da perna que se encontra mais próximo do andarilho. Contudo, esta última alternativa poderia causar oscilações consideráveis na posição do ponto entre varrimentos consecutivos.
Perna detetada
20 pontos centrais
Ponto com maior valor (PMV)
Perna esquerda = perna detetada(1)
: perna detetada(PMV) detetada(PMV+1) : perna detetada Perna direita = perna (end)
Capítulo 4 Interação entre utilizador e o andarilho com base num sensor LRF e no guiador Apesar do ponto médio por vezes não ser o ponto mais próximo do andarilho, a sua posição não sofre oscilações bruscas e, a diferença para o ponto mais próximo em termos práticos são meros centímetros, sendo a sua influência praticamente nula.
Como ponto referência do utilizador, “pm_uti”, considerou-se o ponto médio entre “pm_esq” e “pm_dir”.
pm _ uti= pm _ esq+ pm _ dir
2
Equação 4.1
Os parâmetros importantes a extrair foram a velocidade do utilizador, a sua distância ao andarilho, o ângulo de cada perna em relação ao sensor LRF e o comprimento do passo. A escolha destes parâmetros recaiu na necessidade da sua utilização para o controlo do andarilho. O número de passos, apesar de não ser necessário para o controlo, foi igualmente calculado. Este é considerado um fator importante para a validação do algoritmo.
• Velocidade do utilizador
Foi considerado o movimento de avanço da perna como o movimento que define a velocidade do utilizador. Assim, no gráfico da diferença entre as distâncias dos pontos médios das duas pernas (Figura 4.16), os picos representam o momento onde as pernas se encontram na sua posição mais afastada. Os picos foram detetados recorrendo à função “findpeaks” do Matlab onde são ajustados os parâmetros para a distância mínima entre picos consecutivos e a altura mínima.
Neste gráfico, o movimento de avanço de uma perna em relação à outra, está descrito na transição entre picos consecutivos.
Capítulo 4 Interação entre utilizador e o andarilho com base num sensor LRF e no guiador
Figura 4.16 – Gráfico com a diferença entre as distâncias do ponto médio da perna direita e da perna esquerda. Os picos do gráfico estão representados pelos pontos a vermelho.
A velocidade é então retirada, fazendo o quociente entre a diferença das distâncias de cada perna no momento em que ocorrem os picos pelo tempo decorrido entre cada pico.
Pelo datasheet do sensor LRF, o tempo decorrido entre cada varrimento é de 100ms. Deste modo, o tempo decorrido entre picos consecutivos é dado pelo número de varrimentos entre cada pico a multiplicar por 0,1.
A velocidade é então calculada através da Equação 4.2
V _ uti=(| pm _ dir( pi co 2)− pm _ esq(pico2) |) − (| pm _ dir(pico1) − pm _ esq(pico1) |)
(nº var rimento( pico2)− nº var rimento(pico1))*0.1
Equação 4.2
Como o tempo entre cada varrimento foi convertido para segundos e a distância lida pelo laser é obtida em metros, a velocidade é dada em metros por segundo (m/s).
Capítulo 4 Interação entre utilizador e o andarilho com base num sensor LRF e no guiador • Velocidade média do utilizador
Sendo a velocidade calculada em cada passada, esta pode sofrer variações bruscas de passada em passada. Com vista a atenuar esse efeito, foi calculada a velocidade média do utilizador para um determinado número de passos.
Foi predefinido um parâmetro “n”, que indica de quantos em quantos passos se pretende calcular a velocidade média. Esta média, é então obtida pelo quociente entre a soma das velocidades de “n” em “n” passadas e o tempo decorrido entre cada “n” passadas.
• Distância ao andarilho
Sendo o valor médio de cada perna o seu ponto representativo, o valor atribuído pelo laser a este ponto é considerado a distância de cada perna ao andarilho.
O valor do ponto referente ao utilizador, “pm_uti”, é a distância do utilizador ao andarilho (“d”).
d= pm _uti
Equação 4.3
• Ângulo entre o utilizador e o andarilho
Com o pré-processamento, ao primeiro ponto do varrimento está atribuído um ângulo de 62º. Sabendo, pelo datasheet do sensor LRF, que a sua resolução angular é de 0,36º, tem-se que para os seguintes pontos do varrimento, os seus ângulos são obtidos somando 0,36º ao ângulo do ponto anterior.
Considerando que cada perna é representada pelo ponto médio, o ângulo deste em relação ao sensor LRF é obtido usando a metodologia acima referida.
O ângulo (“θ”) correspondente ao ponto “pm_uti” é assim considerado como o ângulo entre o utilizador e o andarilho.
Capítulo 4 Interação entre utilizador e o andarilho com base num sensor LRF e no guiador
• Velocidade angular do utilizador
Esta velocidade é obtida de forma análoga ao cálculo da velocidade anteriormente apresentado. Neste caso, é utilizada a variação do ângulo entre o utilizador e o andarilho entre cada varrimento.
utilizador
ω
= Δθ0.1
Equação 4.4
Onde “ω” é a velocidade angular do utilizador e “θ” o ângulo entre o utilizador e o andarilho.
• Comprimento do passo
O comprimento do passo é obtido através da diferença entre a distância das duas pernas quando estas se encontram no seu ponto mais afastado.
Para isto, calcula-se em primeiro lugar a diferença entre as distâncias obtidas dos pontos médios das duas pernas.
Quando as pernas estão no seu ponto mais afastado, a função acima referida atinge um pico, como se encontra ilustrado na Figura 4.16.
O comprimento do passo corresponde ao módulo da diferença do valor dos picos detectados.
• Número de passos do utilizador
Este parâmetro é igualmente retirado da diferença entre as distâncias obtidas dos pontos médios das duas pernas. Após identificados os picos da função, o número de passos é dado pela soma do número de picos detetados.
Número _ passos=
∑
nº pi cosCapítulo 4 Interação entre utilizador e o andarilho com base num sensor LRF e no guiador
4.2.2.Através de dados dos potenciómetros
Os potenciómetros colocados no guiador do andarilho permitem ao utilizador indicar intenções de mudança de direção. Os dados provenientes dos potenciómetros foram então utilizados para definir o ângulo do andarilho.
Inicialmente procedeu-se a uma calibração dos dados uma vez que com o guiador numa posição central, a leitura recebida era de 172, com o guiador na posição mais à esquerda o valor lido era de 132, e na extremidade direita o valor apresentado era 258. Desta forma, limitou-se a leitura a um valor de 212 para a variação ser a idêntica quer para o lado esquerdo, quer para o lado direito. Em termos práticos esta limitação não traz qualquer implicação uma vez que são deslocações de pequenos centímetros no guiador.
O passo seguinte foi converter essas leituras das intenções para ângulos. No caso do guiador estar nas posições extremas, corresponderia a uma intenção de viragem de cerca de “nº” relativamente à posição central, para o lado correspondente, podendo este parâmetro ser previamente definido. Através desta relação, atribuiu-se um ângulo para os restantes valores compreendidos entre 132 e 258, sendo que o valor central, 172, não está associado a qualquer intenção de mudança de direção.
Resumindo, quando o utilizador desloca o guiador completamente para o lado esquerdo, isso traduz-se numa mudança de direção por parte do andarilho de “nº” para a esquerda, sucedendo o mesmo quando a intenção de viragem é para o lado direito.
Assim, obtém-se a extração do ângulo do andarilho “φ” proveniente de leituras dos potenciómetros.
4.2.3.Outros parâmetros de marcha possíveis de ser extraídos
Com os dados dos parâmetros acima referidos, é possível extrair outros parâmetros de marcha que podem ser úteis para a análise da marcha da pessoa. Estes, não sendo necessários para o controlo do andarilho, não foram extraídos.
Nesta secção será feita uma breve referência a esses parâmetros, dos quais se destacam a identificação das fases da marcha stance e swing, o ciclo de marcha e
Capítulo 4 Interação entre utilizador e o andarilho com base num sensor LRF e no guiador
A fase stance começa quando um pé entra em contato com o solo e termina quando o mesmo pé deixa de estar em contato com este. Já a fase swing é exatamente o inverso, começa quando um pé deixa o solo e termina quando o mesmo pé entra em contato com o solo. O ciclo de marcha consiste na soma dos tempos decorridos na fase stance e swing. Por sua vez, a cadência consiste no número de passos dados por minuto.
Todos estes parâmetros podem ser extraídos analisando o gráfico com as distâncias das duas pernas. Um exemplo deste tipo de gráfico está representado na Figura 4.14, onde se encontram representadas as distâncias das duas pernas, a azul a perna esquerda e a vermelho a perna direita. A fase de stance corresponde à transição no gráfico de um mínimo para um máximo e a fase swing a transição de um máximo para um mínimo. O número de passos pode ser contabilizado como sendo o número total de máximos ou mínimos representados no gráfico.
Figura 4.17 – Gráfico representativo das distâncias do ponto médio da perna esquerda, a azul, e da perna direito, a vermelho.
4.3. Controlo implementado para o andarilho
O modelo de controlo implementado foi uma adaptação do modelo apresentado por Cifuentes et al. [18] .
Capítulo 4 Interação entre utilizador e o andarilho com base num sensor LRF e no guiador Os parâmetros de marcha necessários para este modelo estão representados na Tabela 4.1.
As variáveis que se pretendem controlar são a orientação do andarilho e a distância entre este e o utilizador, pelo que o objetivo é que a distância entre o andarilho e o utilizador seja constante e igual a um valor predefinido, e que ambos se encontrem centrados, ou seja, o ângulo entre o andarilho e o utilizador (“θ”) tenda para “90º”.
Partindo do modelo cinemático da Equação 4.6, extraiu-se o modelo cinemático inverso que se encontra representado nas Equações 4.7 e 4.8.
Os parâmetros a ser ajustados são os ganhos “Kd“ e “Kθ”. O primeiro é obtido
pelo quociente entre a distância real e a distância medida e o segundo, pelo quociente entre o ângulo “θ” medido sobre o real.
Nas equações abaixo referidas, “
d
~ ” é dado pela diferença entre a distância predefinida (“dd”) e a distância medida entre o utilizador e o andarilho (“d”).Capítulo 4 Interação entre utilizador e o andarilho com base num sensor LRF e no guiador Parâmetros Variável Velocidade linear do utilizador Vutilizador Velocidade angular do utilizador ωutilizador Ângulo entre o utilizador e o andarilho θ Velocidade linear do andarilho Vandarilho Velocidade angular do andarilho ωandarilho Orientação do andarilho φ Distância entre utilizador e o andarilho d D~ . ϕ. ⎛ ⎝ ⎜ ⎜ ⎜ ⎞ ⎠ ⎟ ⎟ ⎟ = cosθ −sinθ −sinθ D − cosθ D ⎛ ⎝ ⎜ ⎜ ⎞ ⎠ ⎟ ⎟ Vandarilho ωandarilho ⎛ ⎝⎜ ⎞ ⎠⎟+ −Vutilizadorcosϕ ωutilizador+ Vutilizador sinϕ D ⎛ ⎝ ⎜ ⎜ ⎜ ⎞ ⎠ ⎟ ⎟ ⎟ Equação 4.6
V
andarilho= cos
θ
⎡
−K
dD
~+V
utilizadorcos
ϕ
⎣⎢
⎤
⎦⎥
− Dsin
θ
−K
θϕ
−
ω
utilizador−
V
utilizadorD
sin
ϕ
⎡
⎣⎢
⎤
⎦⎥
Equação 4.7 ωandarilho= − sinθ D −KdD ~ +Vutilizadorcosϕ ⎡ ⎣⎢ ⎤⎦⎥− Dcosθ −Kθϕ −ωutilizador− Vutilizador D sinϕ ⎡ ⎣⎢ ⎤ ⎦⎥ Equação 4.8 Tabela 4.1 – Variáveis utilizadas na formulação do controlo.Capítulo 5 Resultados e discussão
Capítulo 5 – Resultados e discussão
Neste capítulo serão apresentados os resultados do algoritmo implementado. Em primeiro lugar, serão abordados os resultados para uma marcha com parâmetros controlados: comprimento do passo, número de passos, distância percorrida e tempo de marcha com a finalidade de validar o algoritmo de deteção e identificação das pernas e o controlo implementados. Posteriormente, serão apresentados os resultados da prova de marcha feita por pacientes no Hospital de Braga.
O algoritmo de deteção de pernas foi testado em pacientes diagnosticados com osteoartrose num joelho, os quais foram submetidos a uma cirurgia para colocação de uma prótese, artroplastia total do joelho. Para tal, contou-se com o apoio do serviço de ortopedia e medicina física e de reabilitação do Hospital de Braga. Os testes foram efetuados aos pacientes em dois espaços temporais diferentes, numa primeira fase, 3 a 5 dias após a intervenção cirúrgica e, numa segunda fase, 15 dias após a mesma.
O teste consistiu em caminhar 9 metros em linha reta a uma velocidade normal.
Numa fase mais avançada, o andarilho foi utilizado como ferramenta de reabilitação num paciente diagnosticado com ataxia. Deste modo, os resultados da aplicação do algoritmo de deteção a este paciente serão igualmente apresentados.
Capítulo 5 Resultados e discussão
A finalidade destes testes é validar a deteção e identificação das pernas em casos onde a marcha é bastante variável, o que se verifica neste tipo de pacientes, e onde o andarilho tem um grande potencial para ser usado como ferramenta de apoio à reabilitação. Para todos os pacientes em estudo, o algoritmo de deteção e identificação mostrou-se bastante robusto, tendo detetado e identificado corretamente as pernas ao longo das provas de marcha.
5.1.Validação dos dados obtidos através do sensor LRF
Os processos de validação foram realizados em ambiente laboratorial. Utilizou-se o andarilho ASBGo 2 com o sensor LRF incorporado e realizaram-se três testes. Dos testes realizados, dois consistiram em provas de marcha ao longo de um trajeto predefinido. Definiu-se uma distância a percorrer de 5,1m, onde estavam colocadas marcas no chão, igualmente espaçadas em cerca de 30cm, que seriam os locais onde a pessoa em teste teria que colocar os pés durante o percurso da marcha. Colocaram-se, no total, 17 marcas que correspondem ao número total de passos. Todo o percurso foi filmado permitindo, deste modo, determinar o tempo de marcha (os vídeos podem ser visualizados em [19] e [20]).
No outro teste, o utilizador estava imóvel com um ângulo entre as pernas e o laser predefinido.
Deste modo, nos testes onde foi feita a prova de marcha, pretendeu-se validar se ambas as pernas foram corretamente detetadas e identificadas ao longo do trajeto, o comprimento do passo, o número de passos dados e a velocidade média. No teste onde foi predefinido o ângulo entre as pernas e o laser pretendeu-se validar o ângulo entre o utilizador e o andarilho.
A velocidade em cada passada não foi definida devido à falta de material para proceder à sua medição. Assim, validou-se a velocidade média que, de certa forma, poderá ser um indicador se os valores obtidos para a velocidade estão dentro da gama que seriam de esperar.
Capítulo 5 Resultados e discussão
5.1.1. Validação da deteção e identificação das pernas
Pelos vídeos em [21] e [22], é possível verificar que em ambas as aquisições, tanto a perna esquerda como direita foram corretamente detetadas e identificadas ao longo do trajeto. O vídeo [21] diz respeito à primeira aquisição [19] e o vídeo [22] à segunda aquisição [20].
5.1.2.Validação do comprimento do passo
Uma vez que se colocaram marcas no chão (espaçadas em 30cm) para definir o comprimento do passo, seria de esperar que a média dos comprimentos calculados fosse 30cm. Foi escolhido o comprimento médio para análise pois seria muito difícil, numa marcha normal, fazer coincidir o pé com todas as marcas do trajeto.
Pelo subcapítulo 4.2.1, para se calcular o comprimento do passo, é necessário identificar os picos na função da diferença entre as distâncias das duas pernas ao sensor LRF. Em ambos os casos os picos foram corretamente identificados, como se pode comprovar através da Figura 5.1.
Figura 5.1 – Gráficos com a diferença entre as distâncias dos pontos médios das duas pernas e representação a vermelho dos picos da função. Em A) para o primeiro teste e B) para o segundo teste. Em x, o número de varrimentos e em y o valor da distância lido pelo laser.
Após o cálculo da média do comprimento do passo, o resultado obtido para ambas as provas de marcha foi de 40cm, levando a um erro de medição de 10cm.
Capítulo 5 Resultados e discussão
A justificação para esta diferença baseia-se em dois fatores: por uma lado, no vestuário que, devido ao movimento da perna, muda constantemente de posição. Este fator faz com que, por vezes, o vestuário usado se encontre mais junto das pernas, enquanto noutras aquisições esteja mais afastado. Em ambas as aquisições a peça de vestuário era a mesma e, medindo as possíveis oscilações, estas poderiam chegar aos 2cm; por outro lado, a perna desde que entra em contato com o solo até que deixa de estar em contato com este, varia muito de ângulo relativamente ao pé (Figura 5.2). Este fator pode não ser constante ao longo da marcha e faz variar a posição onde são detetados os picos, sendo responsável pelo restante erro de medição.
Figura 5.2 – Variação do ângulo da perna relativamente ao pé quando este se encontra em contato com o chão. A diferença das distâncias lidas pelo sensor laser foram de 7cm.