Uma solução para navegação indoor
Texto
Imagem
![Figura 2.2: Método de deteção de passos (exemplo) [2].](https://thumb-eu.123doks.com/thumbv2/123dok_br/17833520.844932/32.892.291.650.613.877/figura-método-de-deteção-de-passos-exemplo.webp)

![Figura 2.6: Exemplo da localização de um objeto perdido: mala representada pelo círculo vermelho e o utilizador pelo círculo verde (adaptada de [4]).](https://thumb-eu.123doks.com/thumbv2/123dok_br/17833520.844932/39.892.169.665.699.915/exemplo-localização-representada-círculo-vermelho-utilizador-círculo-adaptada.webp)
![Figura 2.8: Exemplos da aplicação da tecnologia NFC (adaptada de 5 6 7 e [6]).](https://thumb-eu.123doks.com/thumbv2/123dok_br/17833520.844932/43.892.226.603.489.760/figura-exemplos-da-aplicação-da-tecnologia-nfc-adaptada.webp)
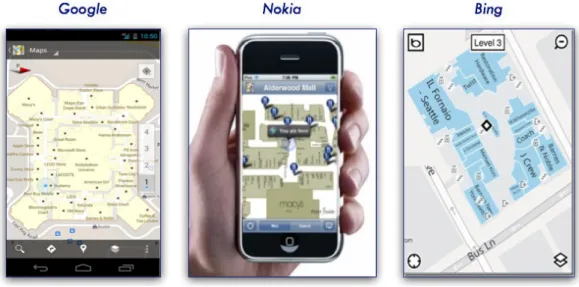
![Figura 2.9: Exemplo do sistema de posicionamento indoor aplicado em [7].](https://thumb-eu.123doks.com/thumbv2/123dok_br/17833520.844932/46.892.241.702.522.786/figura-exemplo-do-sistema-de-posicionamento-indoor-aplicado.webp)
![Figura 2.12: Interface web da aplicação Campus GIS, Universidade Klagenfurt [10].](https://thumb-eu.123doks.com/thumbv2/123dok_br/17833520.844932/57.892.149.685.515.806/figura-interface-web-aplicação-campus-gis-universidade-klagenfurt.webp)
![Figura 2.13: Interface web da aplicação Campus Guiden, NTNU [11].](https://thumb-eu.123doks.com/thumbv2/123dok_br/17833520.844932/58.892.202.740.470.771/figura-interface-web-da-aplicação-campus-guiden-ntnu.webp)
![Figura 3.2: Diagrama esquemático de um sistema de medição baseado em trian- trian-gulação ótica (adaptada de [12]).](https://thumb-eu.123doks.com/thumbv2/123dok_br/17833520.844932/65.892.266.570.704.916/figura-diagrama-esquemático-sistema-medição-baseado-gulação-adaptada.webp)
Documentos relacionados
Este estudo apresenta como tema central a análise sobre os processos de inclusão social de jovens e adultos com deficiência, alunos da APAE , assim, percorrendo
Portanto, mesmo percebendo a presença da música em diferentes situações no ambiente de educação infantil, percebe-se que as atividades relacionadas ao fazer musical ainda são
Entrar no lar, pressupõem para alguns, uma rotura com o meio ambiente, material e social em que vivia, um afastamento de uma rede de relações sociais e dos seus hábitos de vida
Cada qual a seu modo, com caraterísticas organizacionais diferentes, CCIR, CONIC, REJU e Koinonia são quatro entidades ecumênicas que vêm tendo certo destaque no país em
À exceção de pouquíssimos nomes, entre os quais o de Manuel Guimarães (com destaque para Saltimbancos (1951), Nazaré (1953) ou Vidas sem rumo (1956), todos eles na esteira
Devido às características do Sistema Brasileiro, o Planejamento da Operação de Sistemas Hidrotérmicos de Potência (POSHP) pode ser clas- si cado como um problema de
Dessa forma, os níveis de pressão sonora equivalente dos gabinetes dos professores, para o período diurno, para a condição de medição – portas e janelas abertas e equipamentos
PORTUGUÊS: Fonética e Fonologia; Divisão Silábica; Acentuação Gráfica; Emprego do hífen; Ortografia; Pontuação; Processos de Formação das Palavras; Estrutura das
