Tässä diplomityössä tutkitaan sisäpaikannusta langattoman lähiverkon (WLAN) avulla Bayesin päättelyn ja moniulotteisen skaalauksen avulla. Tässä työssä tavoitteena on löytää moniulotteisen skaalausmenetelmän avulla RSS-skannauksille koordinaattiesitys, joka vastaa mahdollisimman tarkasti mittauspisteiden todellista sijaintia. Tapauksissa, joissa signaalinvoimakkuusmittaukset saadaan vain muutamalta tukiasemalta, Bayesin etäisyysestimoinnin ja moniulotteisen skaalauksen yhdistelmät eivät ole hyödyllisiä ongelman ratkaisemisessa.
The aim of this work is to investigate the use of a wireless local area network (WLAN) in indoor positioning using Bayesian inference and multidimensional scaling. Bayesian inference is a method of constructing posterior probabilities using both past probability and observed data. When RSS scans cover enough signal strength measurements from access points located in different parts of the room and environment, the RSS scans can be placed in their proper locations relative to each other using Bayesian inference and multidimensional scaling as the method of analysis.
On the other hand, when RSS measurements are obtained from only a few MAC addresses, using Bayesian inference and multidimensional scaling analysis as a combination does not bring much benefit. RSS vätänotetun radiosignalin voimakkuus (Power of the received signal) SMACOF eräs iterativisen moniulotteisen skaelauksen metode (Scaling with . MAjorizing complex function).
Johdanto
Tämä diplomi-aihe esittää matemaattisen taustan moniulotteisille skaalausmenetelmille, joiden avulla voidaan ratkaista optimaaliset koordinaatit mittauspisteille niiden välisten eromittausten perusteella.
Teoria
Moniulotteinen skaalaus
- Moniulotteisen skaalauksen määritelmiä
- Klassinen moniulotteinen skaalaus
- Iteratiiviset moniulotteisen skaalauksen algoritmit
- Moniulotteinen skaalaus SMACOF-menetelmällä
Moniulotteisen skaalauksen avulla elementit voidaan piirtää kartalle niin, että kartan mitat heijastavat materiaalin sisäistä rakennetta. Tässä luvussa määritellään aluksi kaikille MDS-algoritmeille yhteiset käsitteet, minkä jälkeen esitellään klassisen moniulotteisen skaalauksen yksityiskohdat. Tuloksena moniulotteisen skaalauksen koordinaattimatriisi on matriisi Y, jonka koko on m, joka sisältää materiaalin elementtien konkreettiset koordinaatit yi œRm hypoteettisen koordinaattimatriisin X kaltaisessa muodossa.
Moniulotteisessa skaalauksessa tavoitteena on löytää tuloskoordinaattimatriisi Y, jonka euklidiset etäisyydet di,j pisteiden välillä vastaavat mahdollisimman hyvin materiaalin eroja"i,j. Jos erilaisuusmatriisi on euklidinen etäisyysmatriisi, joka muodostuu hypoteettiset X-koordinaatit, tuloksena saadut klassisen moniulotteisen skaalauksen ˜Y-koordinaatit ovat keskitettyjä ja eri kierrossa X-koordinaatteihin verrattuna. Klassisen moniulotteisen skaalauksen lisäksi on kehitetty lukuisia iteratiivisia menetelmiä moniulotteisen skaaloinnin suorittamiseen (esim.
Tällaisessa tilanteessa erilaisuusmatriisi sisältää määrittelemättömiä arvoja, joten siihen ei voida käyttää klassista moniulotteista skaalausalgoritmia. Toisessa vaihtoehtoisessa menetelmässä alkukoordinaateina käytetään satunnaisia koordinaatteja, mutta iteratiivinen moniulotteinen skaalausalgoritmi toistetaan useita kertoja, esimerkiksi satoja kertoja [4, s.
Kaavaviitteet viittaavat SMACOF-menetelmän jännitysfunktioon ja sen minimointimenetelmään, mutta valitsemalla jännitysfunktio ‡r eri tavalla ja muuttamalla minimointimenetelmää (algoritmin kohta 7), algoritmin runko voidaan sovittaa muihin iteratiivisiin. moniulotteisen skaalaustapauksissa.
Koordinaattien muunnosoperaatiot
- Skaalaus, peilaus, rotaatio ja siirtäminen
- Prokrustes-analyysi
- Moniulotteisen skaalauksen tuloskoordinaattien muuntaminen
Yksi Groenen ja Heiserin simulaatiotutkimusten [18] tulos oli, että SMACOF-menetelmällä minimoimalla useimmat satunnaiset aloituskoordinaatit päätyivät globaaliin minimiin ulottuvuudesta riippumatta. Skaalaus muuttaa pisteiden välisiä etäisyyksiä, mutta jos skaalaat tasaisesti jokaiselle akselille, niiden välinen suhde ei muutu. Skaalausmatriisi S on diagonaalimatriisi, jonka koko on 3◊3, jonka skaalausvakiot sx, sy ja sz ovat diagonaalilla ja suuremmat kuin nolla.
Skaalaus on vakio silloin ja vain, jos kaikki skaalausvakiot ovat yhtä suuret, ts. sx = sy = sz. Jokaiselle akselille z, y ja x määritellään erikseen kiertomatriisi, joka kiertää kohdetta koordinaattiakselin ympäri kulman -, - tai " origon suhteen. Lisäksi on huomioitava, että kertomalla määritelmän 2.13 rotaatiomatriiseja, koordinaattipisteitä kierretään suhteessa origoon, jolloin suhde origoon on merkityksellinen lopputuloksen kannalta.
Kyseisessä algoritmissa koordinaatit X ja Y on keskitetty, joten käännöstä ei oteta huomioon minimoinnin yhteydessä, vaan se voidaan laskea muiden ennakkotietojen avulla kaavan (2.21) esittämässä muodossa. Koska kierto ja peilaus ovat riippumattomia mittakaavavakiosta, kun koordinaatit on keskitetty ja kierto suoritetaan suhteessa origoon [41], Procrustesin ongelma moniulotteisen mittakaavan tuloskoordinaateille ˜Y voidaan kirjoittaa muodossa Usein on tarpeen suorittaa muunnosoperaatioita moniulotteisen skaalauksen tuloskoordinaateille, koska tuloskoordinaatit ovat mielivaltaisessa kiertoliikkeessä ja moniulotteisen skaalauksen iteratiivisia menetelmiä käytettäessä ne voidaan myös peilata yhden tai muutaman tason suhteen.
Simuloidulle materiaalille käytetään moniulotteista skaalausmenetelmää, jolloin tiedetään mittauspisteiden alkuperäiset koordinaatit eli hypoteettiset koordinaatit X. Kierto ja peilaus ovat riippumattomia skaalausvakiosta s, kun koordinaatit on keskitetty ja kierto suoritetaan suhteessa alkuperä [41]. Siten peilaus- ja rotaatiomatriisista yhdistetty matriisi A = PR voidaan ratkaista Procrustes-analyysillä käyttämällä kaavoja ja (2.26).
Bayesilainen päättely
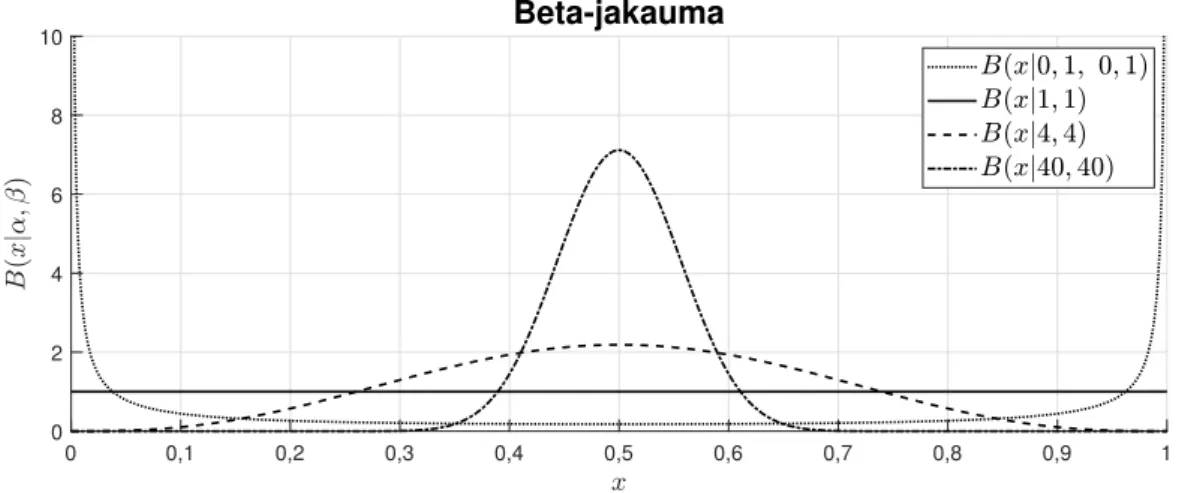
Jos parametritaksolla on hyvin vähän ennakkotietoa, parametrit -ja- voidaan valita niin, että Beta-jakauma muuttuu vakioksi. Jos toisaalta parametrien taksonomiassa on paljon merkittävää ennakkotietoa, voidaan parametrien arvoiksi valita suuria arvoja, jolloin jakauman varianssi pienenee ja ennakkotieto niillä on merkittävämpi vaikutus posterioriin. Jos ennakkotiedolla halutaan reilu vaikutus jälkikäteen, parametrien arvot - ja - voidaan valita siten, että Beta-jakauman keskiarvo on yhdenmukainen aiemman tiedon kanssa, mutta varianssi on suurempi.
Ydinestimointi
Sovellus
- Sisätilapaikannus
- MDS-algoritmien käyttö WLAN-sisätilapaikannuksessa
- Signaalin vaimenemismalli
- RSS-skannausten samanlaisuuden arviointi
Koska solmut ovat tässä tutkimuksessa oletuksena mittauspisteitä eivätkä tukiasemia, niiden välisiä etäisyyksiä ei voida arvioida toisen mittauspisteen lähettämästä signaalista, koska mittauspisteet eivät itsessään ole signaalilähteitä. Etäisyyden arvioinnin tulee siksi perustua pelkästään RSS-skannausten erojen mittaamiseen, ei signaalin vaimennusmallilla arvioituun tukiaseman ja mittauspisteen väliseen etäisyyteen. Aikaisemmissa moniulotteisen skaalaustutkimuksissa on todettu, että paremman tuloksen toivossa on parasta klusteroida suuri data pienempiin osiin ennen moniulotteisen skaaloinnin suorittamista [21].
Tämä tutkimus ei ota kantaa klusterointimenetelmiin, vaan oletetaan, että materiaali on jo klusteroitu sopivan pieniksi kokonaisuuksiksi. Seuraavaksi keskitymme kirjallisuudesta löydettyihin esimerkkeihin, joissa moniulotteisella skaalalla on ratkaistu sisätilojen WLAN-paikannusongelmia. Signaalin vaimennusmallilla generoidusta simulaatiosta kerätään tilastoja RSS-skannausten erojen ja mittauspisteiden välisen fyysisen etäisyyden välisestä suhteesta.
Langattomat paikannustekniikat voidaan jakaa etäisyysmittauksiin perustuviin teknologioihin ja teknologioihin, jotka eivät käytä suoria etäisyysmittauksia paikannettavan kohteen ja tunnetun sijainnin välillä. Sormenjälkimenetelmän heikkous on siis radiokartan luomiseen ja ylläpitoon liittyvä työ sekä RSS-skannausten herkkyys häiriöille [22]. Ongelma, jonka tässä tutkimuksessa yritettiin ratkaista, oli etäisyyden arviointi solmujen välillä, jotka eivät ole suoraan yhteydessä toisiinsa.
Eromittauksena käytettiin TOA- tai RSS-mittauksiin perustuvaa etäisyyden estimointia ja niille painotettua moniulotteista skaalausmenetelmää. Tutkimuksessa verrattiin klassista moniulotteista skaalausta ja painotettua moniulotteista skaalausta (WMDS) mittauspisteiden paikantamisessa, koska jälkimmäinen mahdollistaa puuttuvat etäisyydet. Kirjallisuudessa moniulotteinen skaalaus on siksi ollut laajalti käytössä tilanteissa, joissa pisteiden välille on pystytty muodostamaan suora etäisyysestimaatti, kuten eroarvo.
Mainituissa tutkimuksissa itse eromatriisin kehitystä on otettu vain vähän huomioon, mikä tässäkin tutkimuksessa on jälleen tärkeä rooli tulosten onnistumisen kannalta. Seuraavaksi yritetään arvioida kahden mittauspisteen x1 ja x2 välisen etäisyyden suhdetta näissä pisteissä mitattujen RSS-skannausten eroon, kun signaalit seuraavat signaalin vaimenemiskuviota. Jos matriisin G sarakevektorien oletetaan olevan lineaarisesti riippumattomia, vektori x voidaan ratkaista pienimmän neliösumman menetelmällä [42].
Testaus
- Mittausaineiston kerääminen ja analysointi
- Simulaatioaineiston muodostaminen
- Simulaation analysointi
- Tulokset
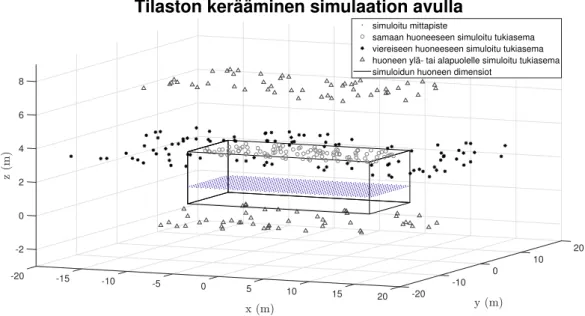
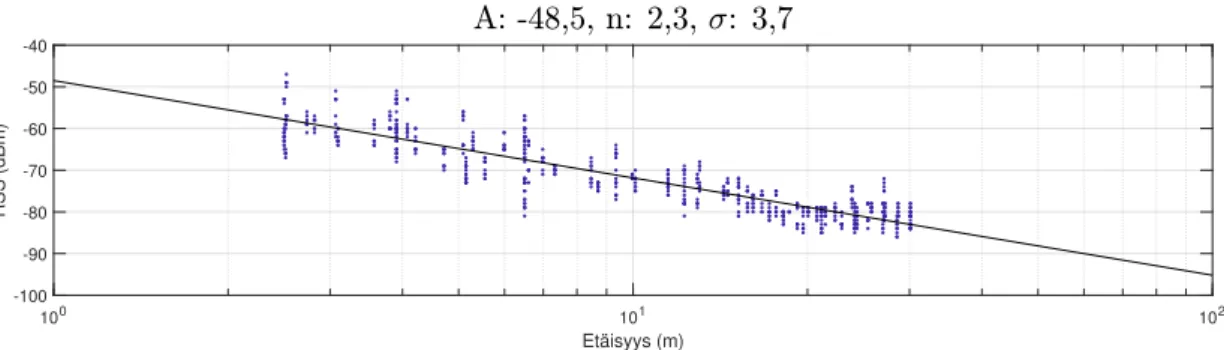
Simulaatiota varten oli tarpeen määrittää signaalin vaimennusmallin parametrit A, nja‡. Parametrit arvioitiin Tampereen yliopiston Hervannan kampuksen Sähkötalon käytävillä tehdyistä mittauksista. Kunkin tukiaseman mitatut signaalinvoimakkuudet ja vastaavat mittauspisteen ja tukiaseman väliset etäisyydet taulukoitiin. Jokaiselle mittauspisteelle simuloitiin kaikkien simuloitujen tukiasemien signaalinvoimakkuusarvot signaalin vaimennusmallin 3.1 mukaisesti käyttämällä satunnaisesti generoituja parametreja kuvan 7 normaalijakaumista.
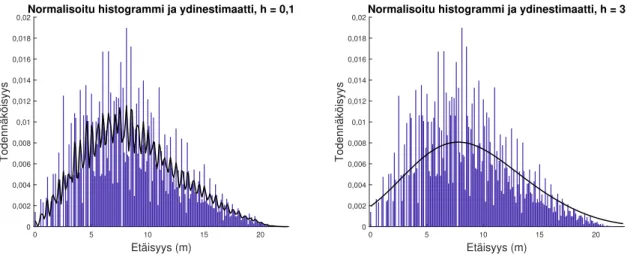
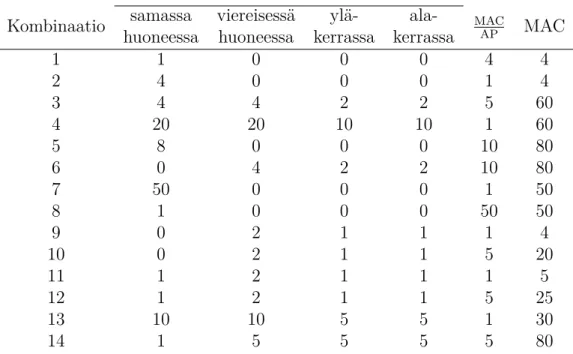
Reiteille simuloituja RSS-mittauksia eri tukiasemien yhdistelmillä analysoitiin yhteensä yhdeksällä eri tavalla, jotka on esitetty taulukossa 4.2. I Tasoitettu Bayesin Differentioitu Painotettu Tuloksia laskettaessa havaittiin, että joskus tiheysfunktiota p(d|U) suoraan laskettaessa kaavalla (3.5) esiintyy ei-toivottua kohinaa, mikä johtaa maksimihaun harhaan (kuva 10). Vasemmalla olevassa kuvassa etäisyyksien arvioimiseen käytetään yhteistä tilastoa ja oikealla eri tilastoja eri tukiasemista niiden luokkien mukaan.
Virhe kuvaa kuinka hyvin arvioidut koordinaatit vastaavat alkuperäisiä koordinaatteja analysoinnin ja koordinaattimuunnoksen jälkeen. Kuvassa 12 on esitetty 100 iteraatiosta laskettu keskivirhe ja virhehajautus kullekin tukiasemayhdistelmälle ja analyysimenetelmälle. Näissä ryhmissä ei ollut suurta merkitystä, käytettiinkö estimoinnissa tasoitettua vai tasoimatonta tiheysfunktiota.
Tietyssä yhdistelmässä 1 samassa huoneessa reitin kanssa oli vain yksi tukiasema, joka lähetti signaaleja neljältä. Yhdistelmässä oli 50 tukiasemaa, joista jokaisella oli vain yksi MAC-osoite, samassa tilassa kuin reitti. Etäisyystiheysfunktion tasoituksella ja käytetyllä MDS-algoritmilla ei ollut suurta vaikutusta keskivirheeseen.
Yhteenveto
Toisaalta moniulotteinen skaalaus, sekä klassisessa että painotetussa versiossa, on luonnostaan luotettavaa kohtuullisen kokoisilla tiedoilla. Blostein, Kahden 3D-pistejoukon pienimmän neliösumman sovitus, IEEE Transactions on Pattern Analysis and Machine Intelligence, Voi. Foh, A Practical Path Loss Model for Indoor WiFi Position Enhancement, 2007 6th International Conference on Information, Communication and Signal Processing, IEEE, s.
Robertson, Online path loss model training in Bayesian WLAN indoor positioning, International Conference on Indoor Positioning and Indoor Navigation, IEEE, 2013. So, Efficient Weighted Multidimensional Scaling for Wireless Sensor Network Localization, IEEE Transactions on Signal Processing, Vol. . Nandi, A Novel Distance Estimation Approach for 3D Localization in a Wireless Sensor Network Using Multidimensional Scaling, Information Fusion, Vol.
Hero Alfred, Distributed multidimensional weighted scaling for node localization in sensor networks, ACM Transactions on Sensor Networks (TOSN), Vol. Piche, A survey of selected indoor positioning methods for smart phones, IEEE Communications Surveys & Tutorials, Vol. Abdelzaher, Range-free localization schemes for large-scale sensor networks, Proceedings of the 9th Annual International Conference on Mobile Computing and Networking, ACM, 2003, p.
Groenen, Scaling of cluster differences with an intracluster loss component and a fuzzy sequential approximation strategy for avoiding local minima, Psychometrika, Vol. Zha, Sensor positioning in wireless ad-hoc sensor networks using multidimensional scaling, IEEE INFOCOM 2004, IEEE, p. Dunson, Marginally specific priors for non-parametric Bayesian estimation, Journal of the Royal Statistical Society: Series B (Statistical Methodology) , Vol.
Li, RSS-Based Location Estimation with Unknown Pathloss Model, IEEE Transactions on Wireless Communications, Vol. Neudecker, Matrix differential calculus with applications to simple, hadamard and kronecker products, Journal of Mathematical Psychology, Vol. Abril, Dynamic estimation of optimal path loss model in an RSS positioning system, 2008 IEEE/ION Position, Location and Navigation Symposium, IEEE.