On peut ainsi montrer une réduction de la consommation d'énergie en utilisant plus d'interfaces. Enfin, nous avons proposé d'améliorer le contrôle de la consommation d'énergie dans notre architecture en utilisant des antennes directives.
Introduction sur les réseaux de capteurs sans fil
Généralités
Réseaux de capteurs sans fil
- Mise en œuvre
- Déploiement
- Exemple d’applications des WSNs
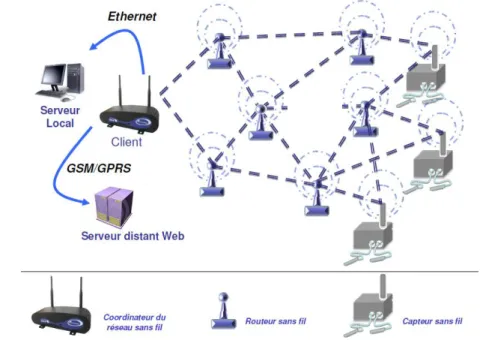
Un réseau intégré de capteurs sans fil se caractérise par une autonomie du point de vue de la réception d'informations physiques, du traitement, du stockage puis de la transmission des données d'un module sans fil. Le temps et le coût de déploiement d'un réseau de capteurs n'étant pas négligeables, il existe de nombreuses applications pour lesquelles le déploiement aléatoire permet d'obtenir le meilleur compromis.
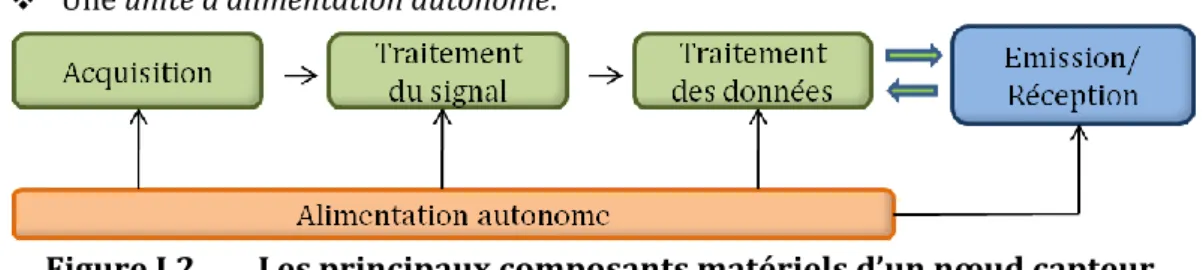
Le nœud capteur
- Composants matériels et logiciels
- Modules de nœuds capteurs existants
- La pile protocolaire
Le matériel comprend un microcontrôleur de la famille Atmel, un modem radio (généralement un TR 1000 de RFM) et diverses entités de sortie. Il ne faut pas oublier que le choix du mode d'accès au médium est l'un des facteurs déterminants des performances d'un réseau de capteurs sans fil.
Principales caractéristiques d’un WSN
Les réseaux traditionnels vs les WSNs
- Typologie des réseaux sans fil
- Les principales normes de communication sans fil
- Protocoles de communication pour les WSNs
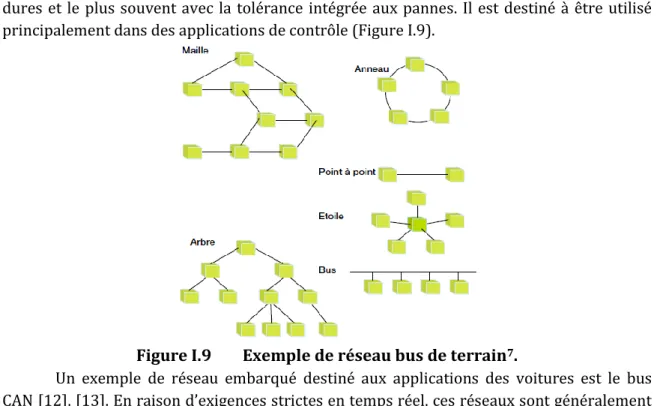
Les bus de terrain se concentrent également sur la gestion de l'environnement physique (comme la détection et le contrôle des données), les rapprochant des réseaux de capteurs sans fil. Ceci n'est pas compatible avec les réseaux denses de capteurs sans fil, où un grand nombre de masternodes serait nécessaire.
La limitation en énergie pour un WSN
Nous pouvons voir que le problème lié à la consommation d'énergie est un aspect souvent pris en compte dans la conception des technologies de communication sans fil. En général, les batteries ont une faible capacité, et la charge avec récupération d'énergie est compliquée et insuffisante, ce qui impose un contrôle strict de la consommation énergétique du nœud capteur.
La mobilité
En analysant la consommation énergétique des microcontrôleurs et des récepteurs radio [35], une question évidente se pose : quelle est la solution la plus optimale pour utiliser les sources d'énergie d'un nœud capteur. Nous avons parlé de l'influence que "l'absence de fil" dans les WSN a sur la consommation totale d'énergie.
Optimisation et paramètres de performances
L’optimisation { travers les principes du cross-layer
Dans ces circonstances, une étude sur les aspects de mise en œuvre des couches de communication pour les réseaux de capteurs sans fil est nécessaire. Il sera donc nécessaire de concevoir de nouveaux protocoles car les réseaux de capteurs sans fil nécessitent des fonctions de routage spécifiques.
Les principaux paramètres de performances
- La gestion du réseau
- La synchronisation
- La synchronisation vs l’économie d’énergie
- L’économie d’énergie
- Topologie dynamique et passage { l’échelle
Le protocole de synchronisation temporelle pour les réseaux de capteurs (TPSN) est une implémentation de la méthode de synchronisation « émetteur-récepteur ». Une grande partie de la discussion précédente montre que l'énergie est une ressource précieuse dans les réseaux de capteurs sans fil et que l'efficacité énergétique devrait être un objectif évident d'optimisation [45].
![Figure I.14 Différentes options de contrôle de topologie [64].](https://thumb-eu.123doks.com/thumbv2/1bibliocom/459829.66853/41.892.119.745.363.748/figure-options-contrôle-topologie.webp)
Evaluation des WSNs
Etude des outils disponibles
Ensuite, une description de l'environnement de la simulation doit être donnée, c'est-à-dire le type de canal radio. Ce logiciel est reconnu et surtout utilisé dans l'étude de la nature dynamique des réseaux de capteurs sans fil.
Justification de notre choix
C++, qui représente la partie centrale du simulateur (core) et définit tous les mécanismes internes des objets de simulation ; Étant donné que NS-2 fournit un grand nombre d'objets C++, il est recommandé d'utiliser ces objets et de créer une simulation à l'aide d'un script de simulation Tcl.
Objectifs de notre recherche
- Présentation générale de notre application
- Le choix de la topologie
- Le besoin de synchronisation
- Le besoin d’économie d’énergie
La communication énergétique entre les éléments du réseau reste la solution la plus utilisée dans le besoin de gestion de l'énergie. Une autre possibilité pour économiser de l'énergie est d'introduire, si l'application le permet, des états de fonctionnement des capteurs, ce qui n'est pas le cas de la tonalité (car les capteurs doivent rester constamment actifs).
Conclusion
En ce qui concerne l'aspect énergétique, nous avons fait le choix de plusieurs stratégies de gestion possibles (notamment pour l'énergie de calcul et de communication) ; cela nous permettra de prolonger au maximum la durée de vie de notre système. Le dernier chapitre (chapitre V) aura pour objectif de présenter l'ensemble des résultats des simulations et expérimentations que nous avons réalisées pour la conception de notre système de communication.
Introduction
Tous ces types d'applications nécessitent également que le capteur soit autonome du point de vue de l'alimentation. Ces réseaux de communication sans fil se caractérisent généralement par un faible débit, une portée radio inférieure à quelques centaines de mètres et une consommation énergétique qui dépend de la consommation du capteur et de sa fréquence d'interrogation30.
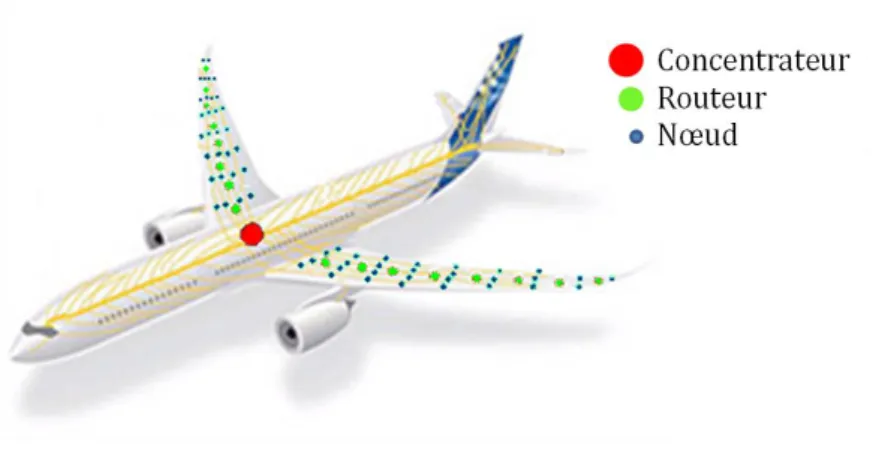
Description de notre réseau d’instrumentation et de mesures
- Topologie du réseau
- Méthodologie et choix de technologies
- Spécification des besoins
- Analyse préliminaire du système
- Conception du système
- Description des couches liaison de données et physique
- Description de la couche réseau
- Description de la couche Applicative
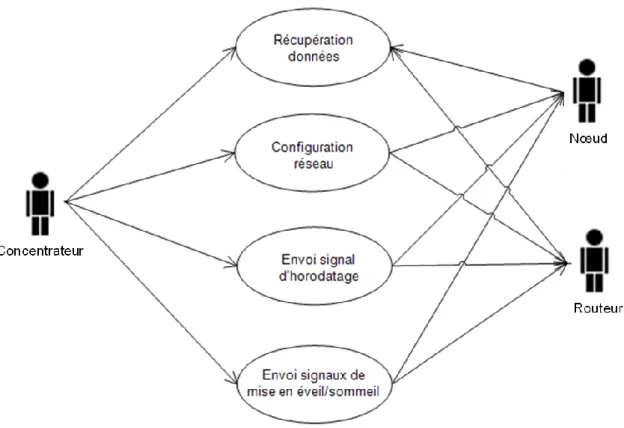
Ainsi, dans la Figure II.6, les principales étapes résultant de la simplification des cas d'utilisation discutés précédemment sont illustrées. Les différentes applications du système SACER découlent naturellement du diagramme de cas d'utilisation de la figure II.15.
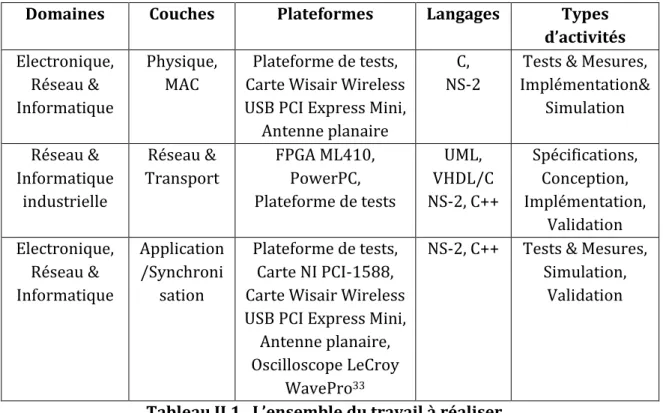
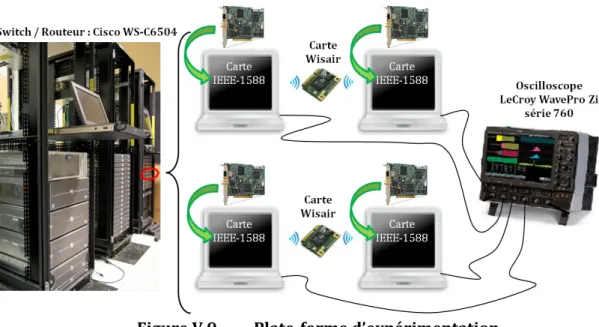
Description de la plateforme matérielle
Carte Wisair Wireless USB PCI Express Mini
A noter que les campagnes de test liées à la synchronisation nous ont permis de montrer une incompatibilité fonctionnelle entre les cartes Wisair et les cartes NI PCI-1588, ce qui se traduit par une dégradation des performances en terme de précision de synchronisation. Par conséquent, les cartes Wisair n'ont pas été conservées dans notre projet.
Carte NI PCI-1588
Selon la connexion choisie par l'utilisateur, l'écart type des heures sera. Ainsi, nous pouvons voir que les capacités de la norme IEEE-1588 répondent aux limitations de notre application.
Plateforme ML410
33 ns pour une connexion Ethernet directe via un câble d'une longueur moyenne de 3 m. Pour cela, plusieurs entrées/sorties haut débit sont disponibles, comme des ports PCI express accessibles via des émetteurs-récepteurs RocketIO Multi-Gigabit (MGT, 622 Mb/s à 6,5 Gb/s).
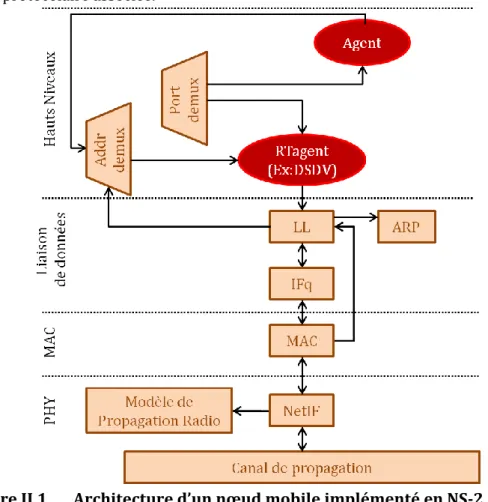
Modélisation sur NS-2
Eléments de base de la simulation en NS-2
L'agent est un objet NS-2, responsable de la création et de la destruction des packages. L'agent de couche transport contrôle l'encombrement et la fiabilité d'un flux de données reçu d'une application associée.
Les principales contributions en NS-2
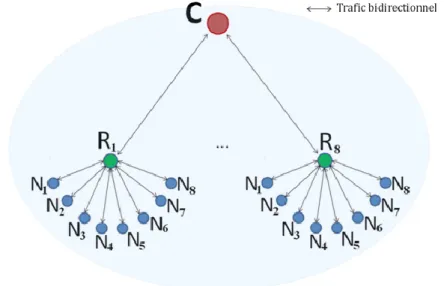
- Implémentation de notre topologie réseau
- Proposition d’utilisation d’interfaces multiples
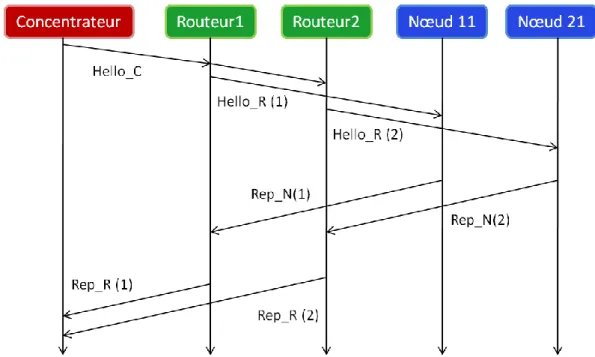
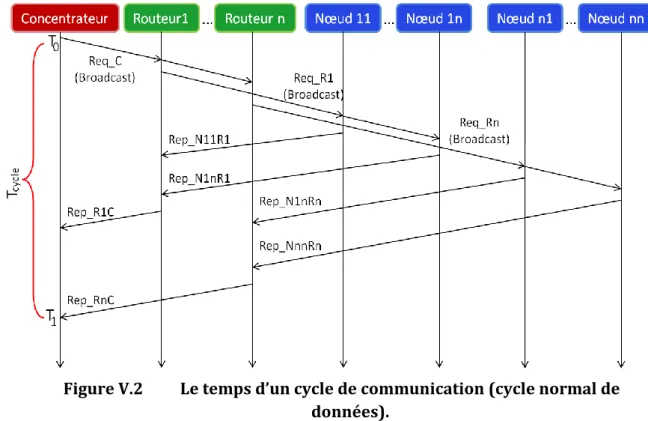
La session de communication débutera au niveau du concentrateur avec la création au niveau de la couche application d'un paquet avec l'identifiant "pkt_no=150. Après la réalisation d'un cycle complet, le concentrateur recevra un message de chaque routeur avec l'id "pkt_no= 400.
Conclusion
Introduction
Problématique de la synchronisation
- Stratégies possibles
- Analyse
- Bilan
- Le standard IEEE-1588
- Le protocole de synchronisation PBS
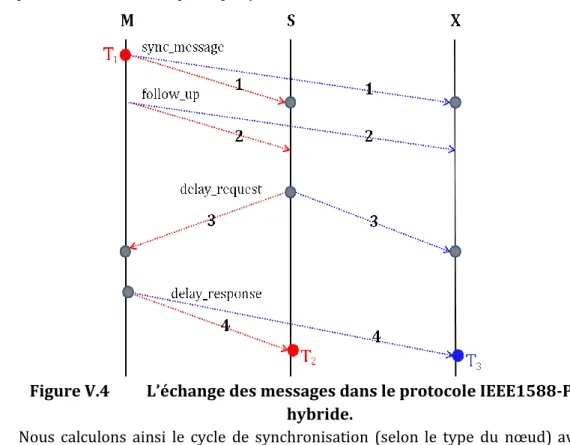
Ainsi, les mesures effectuées montrent l'influence de l'asymétrie du lien de communication sur la précision de synchronisation apportée par le protocole IEEE-1588. Le nœud X recevra une série de messages de synchronisation contenant les horodatages de la paire A-B.
Présentation de la contribution: l’IEEE1588-PBS hybride
Algorithme et fonctionnement
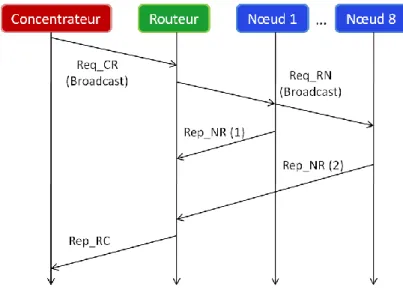
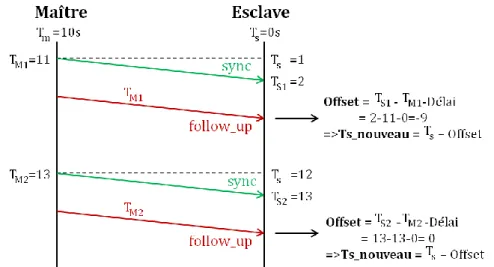
Le fonctionnement du nouveau protocole est expliqué dans l'exemple suivant (Figure III.6), pour un groupe plus petit { seulement 3 nœuds comme annoncé précédemment. La Figure III.6 montre l'échange de messages entre éléments de réseau pour un cycle de synchronisation a) Le nœud maître (M) diffuse un message sync_message (1) à tous les nœuds et mémorise l'heure d'envoi du message.
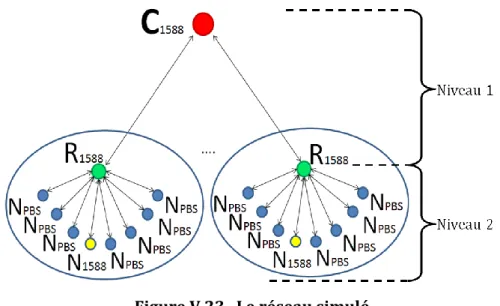
Intégration dans notre cas d’étude
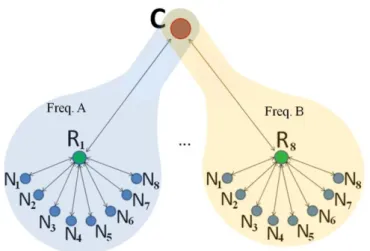
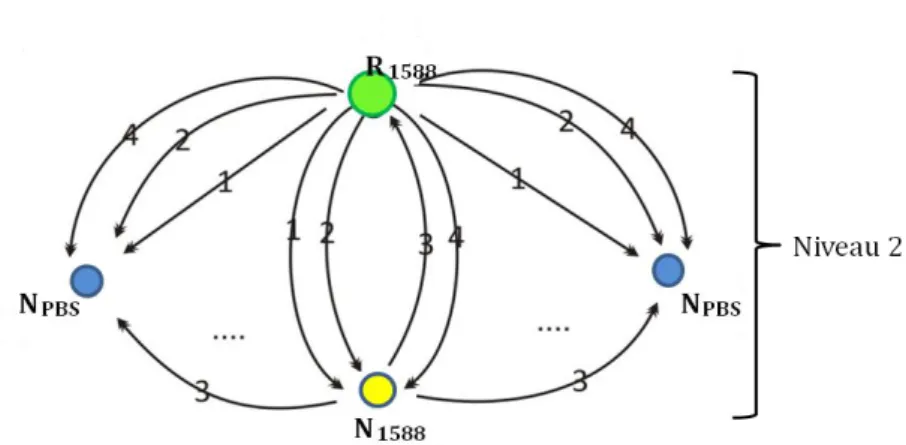
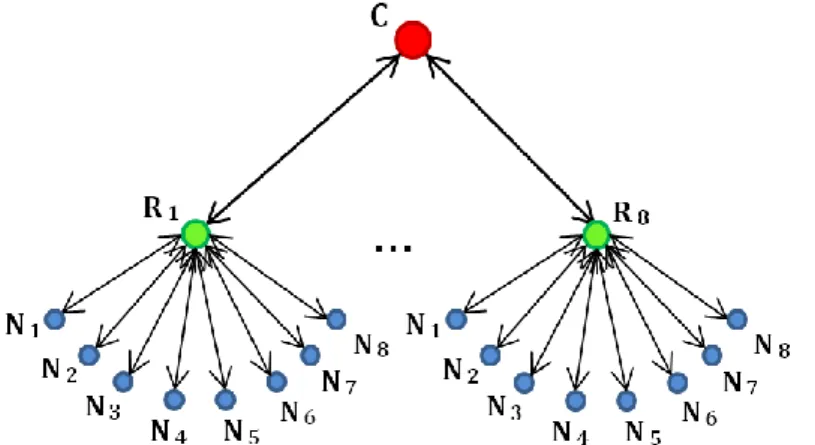
Pour le trafic de synchronisation, le concentrateur (C1588) communique avec les routeurs (éléments R1588) en échangeant des messages selon le principe de l'IEEE 1588 (synchronisation de niveau 1) (Figure III.8). Les sept autres nœuds (NPBS), qui se synchroniseront en utilisant les informations contenues dans les messages reçus, selon l'algorithme hybride IEEE1588-PBS présenté précédemment (Figure III.6), et illustré par la figure suivante (figure III.9).
L’impact sur la consommation d’énergie
Implémentation et mise en œuvre
Conditions pratiques de mise en œuvre
L'avantage est qu'il utilise une tension de correction qui réduit la fluctuation de fréquence de température. Concrètement, la tension de correction sera appliquée à la diode du circuit de manière à ce que la fréquence du cristal ait une très faible variation (une tolérance pouvant approcher 0,1 ppm).
Les étapes d’implémentation dans le simulateur NS-2
- L’intégration du modèle d’horloge interne
- La phase d’implémentation d’IEEE-1588
- La phase d’implémentation d’IEEE1588-PBS hybride
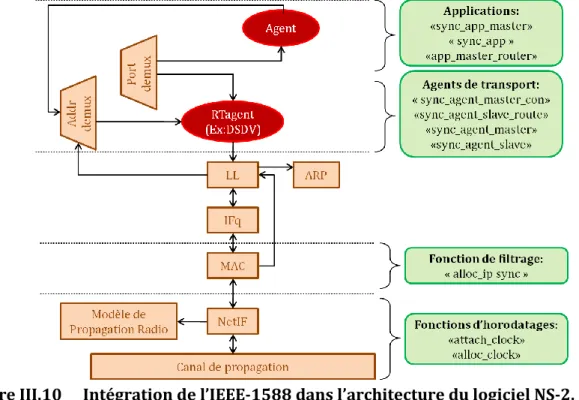
Dans la figure ci-dessous (Figure III.10), nous avons présenté les principales modifications que nous avons apportées au niveau de la pile protocolaire logicielle NS-2, dans le but de simuler le protocole de synchronisation IEEE-1588. Dans la Figure III.11, nous présentons les modifications qui nous ont permis d'intégrer le protocole de synchronisation hybride IEEE1588-PBS dans le logiciel de simulation NS-2.
Conclusion
Introduction
La différence entre ces deux représentations est que dans le schéma de gauche (a) les antennes rayonnent dans toutes les directions, contrairement à l'antenne du schéma de droite (b) qui n'émettra que dans une direction déterminée par l'orientation de la principale lobe. On trouve également des antennes bidirectionnelles, c'est-à-dire des antennes qui rayonnent également vers l'avant et vers l'arrière, comme l'antenne 1/2 dipôle (Figure IV.1 (a)).
L’impact des antennes directives sur les différentes couches de communication
Introduction
La classification la plus générale des antennes est étroitement liée aux paramètres susmentionnés, de sorte que l'on peut parler de deux grandes classes d'antennes. Selon les applications, l'utilisation d'antennes directionnelles présente des avantages, comme éviter le rayonnement dans une zone où des interférences avec d'autres émetteurs pourraient se produire ou économiser de l'énergie par rapport aux antennes omnidirectionnelles, mais aussi des inconvénients, notamment la complexité de gestion.
Concepts de base
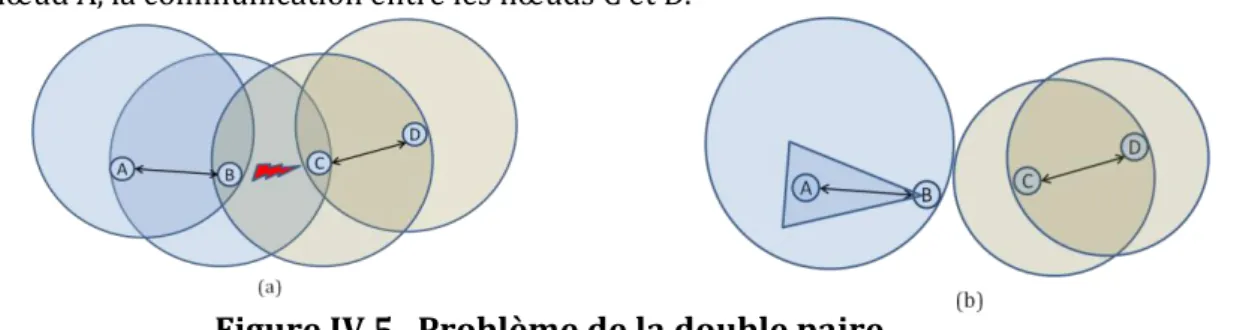
Le phénomène de capture se produit lorsque, par exemple, le nœud 0 est capable d'atteindre et de communiquer en mode direct avec le nœud 2, et le nœud 4 avec le nœud 1 (figure IV.4). C'est l'exemple de la paire double illustrée à la Figure IV.5 (a), où le nœud B interfère lors de sa communication avec le nœud A, la communication entre les nœuds C et D.
Propositions pour l’utilisation d’antennes directives
- Solutions existantes pour la couche MAC
- Les principaux protocoles de routage
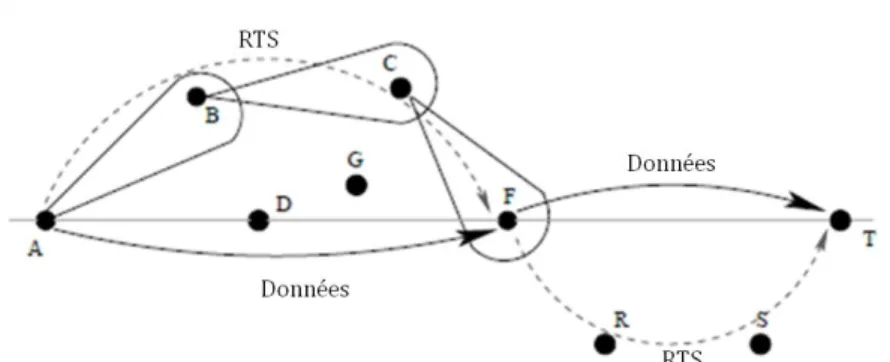
Ainsi, [141] propose une méthode basée sur l'apprentissage d'automates qui choisit un chemin en fonction d'un paramètre principal tel que le niveau de consommation d'énergie. Le principe de fonctionnement est schématisé à la Figure IV.7, où le nœud A essaie d'établir une connexion directionnelle avec le nœud F.
L’applicabilité dans une catégorie large de réseaux sans fil
Un autre aspect important est que chaque nœud connaît le coût pour atteindre chacune des régions ainsi formées. Dans la phase de routage, le paquet contient les informations sur la région de destination, et chaque nœud connaît sa position et son énergie résiduelle ainsi que celles de ses voisins (sur demande).
Principe et implémentation de notre solution
Proposition d’architecture d’antennes directives
Chaque antenne directive peut émettre et recevoir des données et est caractérisée par son gain d'émission et de réception (Gt, Gr) dans une direction spécifique (Figure IV.10). 116 IV.4 Principe et mise en oeuvre de notre solution. activer/désactiver les antennes, déterminer l'angle de réception du signal et déterminer la force du signal reçu.
L’implémentation de notre solution
Conclusion
Introduction
Ainsi, la Figure IV.1 présente les deux principales catégories de diagrammes de rayonnement (représentés dans le plan horizontal) : pour les antennes omni/bidirectionnelles (a) et pour les antennes directionnelles (b). Ce phénomène peut être évité, par exemple, en mettant en œuvre un modèle d'antenne directionnelle pour B (Figure IV.5 (b)), ou une réduction de la puissance d'émission qui diviserait le réseau en deux composants connectés.
Topologie : choix et validation
Objectif : déterminer la meilleure topologie du système
Nous constatons également que la durée d'un cycle dépend du nombre de routeurs présents dans le réseau. Nous pouvons conclure que le nombre de routeurs a une influence directe sur le temps de propagation du réseau.
Intégration des interfaces multiples
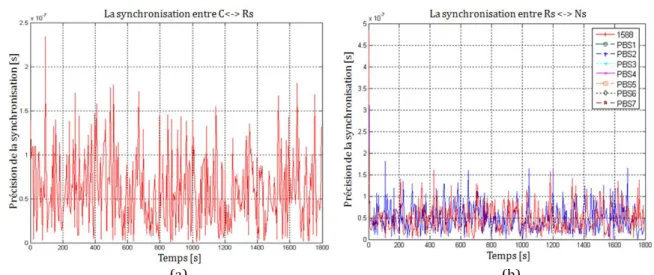
Vérifier que cela n'affecte pas la précision de synchronisation par rapport aux performances (performances de précision de synchronisation allant de quelques dizaines de microsecondes à quelques centaines de nanosecondes) obtenues dans [146]. Ainsi, dans la Figure V.6(a), nous pouvons observer que la précision de synchronisation pour le premier niveau de Hub-Routeurs correspond à la performance d'organisation de type MIR en présence du protocole hybride IEEE1588-PBS [146], car le les valeurs varient entre 10 ns et 230 n.s.
Synthèse
En revanche, dans une organisation de type MIC, le routeur dispose d'une interface de communication qui équivaut à acheminer le trafic divisé par deux par rapport à l'autre solution. En effet, dans le scénario de type MIR (Figure V.5), la présence de deux interfaces de communication au niveau des éléments intermédiaires (routeurs) va augmenter significativement le trafic, ce qui signifie une consommation d'énergie multipliée par deux ou plus. .
La synchronisation vs. l’économie d’énergie
Evaluation des solutions existantes
- Description de la plateforme
- Etudes sur les performances de synchronisation
- Conclusion
Analyse Matlab41 - pour calculer la précision de synchronisation à partir des signaux capturés par l'oscilloscope. La première méthode d'évaluation de la variation de gigue, Λ1, consiste à utiliser la valeur moyenne d'une capture d'oscilloscope.
Notre proposition de synchronisation. Analyse comparative des performances
- La précision de la synchronisation
- Evaluation de la consommation d’énergie
Ces informations seront ensuite utilisées dans l'algorithme de synchronisation au niveau de la couche application. Par conséquent, dans la figure V.24, nous avons présenté la précision temporelle pour la communication de niveau 1 (Hub - Routeurs), qui est de l'ordre de la centaine de nanosecondes.
Conclusion
La directivité des antennes vs. l’économie d’énergie
Analyse comparative des performances
Ainsi on peut voir sur la figure V.27 (a) la précision de la synchronisation pour le premier niveau de communication. Pour un nœud PBS (Figure V.30), les simulations ont montré que la durée de vie augmente alors de 64%.
Conclusion
Synthèse générale
Krishnamurthy, "Pump-slowly, fetch-quickly (PSFQ): en pålidelig transportprotokol for sensornetværk", IEEE Journal on Selected Areas in Communications, Vol.23, nr.4, s. Tomaciello, "One-Way Delay Measurement: State of the Art", IEEE Transactions on Instrumentation and Measurement, Vol.57, no.