101 3.9 Courbes enveloppes associées à plusieurs points de la surface. charge d'un empilement de 50 particules compactées suivant un chemin de charge isotrope jusqu'à Df = 0,9. 107 3.12 Courbes enveloppes associées à plusieurs points de la surface. charge d'un empilement de 50 particules. a) et (b) Compression isotrope, (c) et (d) compression matricielle jusqu'à une densité relative finale Df = 0,7.

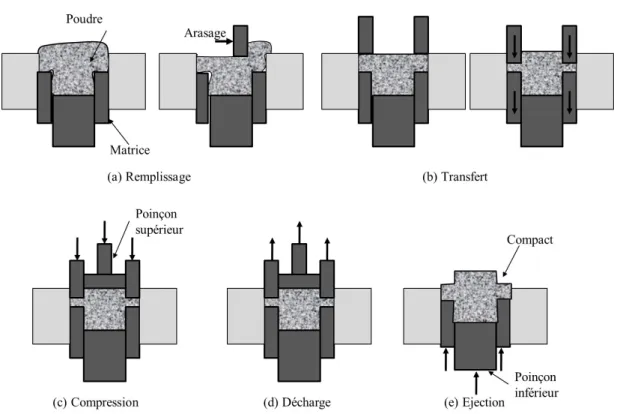
Procédé de la compression à froid
La phase de compression
L'étape suivante, appelée transfert de poudre (figure 1.2.b), consiste à mettre en place les différentes pièces. Le volume initial après remplissage ou transfert est réduit d'un tiers ou de moitié selon la poudre utilisée.
Simulation numérique du procédé
Mais quel est l’intérêt et la place de la simulation numérique dans le processus industriel ? En effet, la simulation numérique doit au préalable intégrer une base de données complète liée au comportement mécanique de la poudre.
Modélisation d’un matériau granulaire
Notions élémentaires d’élasto-plasticité
Figure 1.4 – Schématisation du domaine élastique et de la surface de charge dans l'espace de contraintes principal. L'écrouissage isotrope est une homothétie de la surface du joint sans modification de sa forme.

Modèle de Drucker-Prager Cap
Les notions de surface de charge, de loi d'écoulement et d'écrouissage constituent l'approche la plus courante de la modélisation continue des poudres ductiles dans le contexte de l'élastoplasticité. La surface de charge est donc indépendante du chemin suivi et dépend uniquement de la densité relative du courant.

Approches de caractérisation des poudres
Approche expérimentale
Supposer que la trajectoire de chargement n’a aucune influence sur les surfaces de chargement est une hypothèse restrictive. Les surfaces de charge obtenues pour les deux types de charges sont de forme très différente.

Approche multi-échelles
Positionnement de la MEFMP par rapport à la DEM
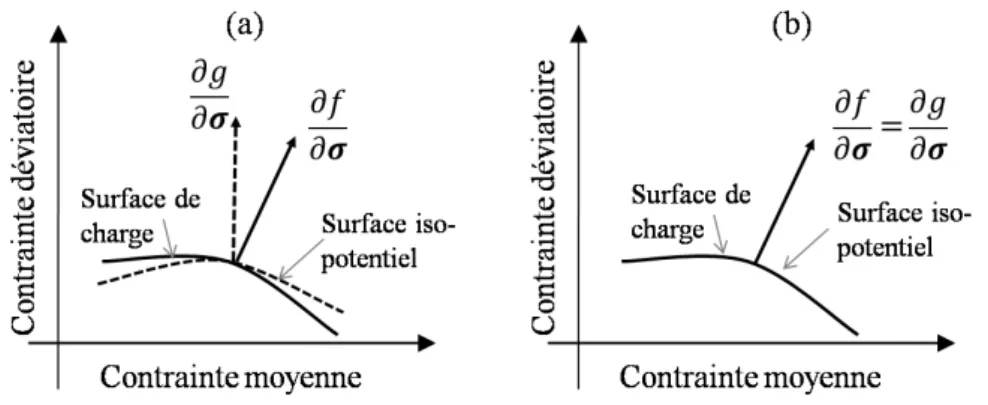
Dans le cas où σ est un point régulier sur la surface de charge (Figure 1.5), nous avons l'équation (1.3) qui donne dεpl ⊥f. Le surfaçage cinématique est une translation de la surface de chargement sans changement de taille ou de forme.
Validation expérimentale de la MEFMP
Évolution de la surface de charge avec la MEFMP
L'évolution de la surface est décrite par les trois paramètres d, β et Pb visibles sur la figure 1.8, qui sont respectivement Les résultats montrent que la forme de la surface de charge pour les orbites composées dépend de la densité relative intermédiaire D1, qui varie entre 0,6 et 0,9.
Conclusion
En revanche, il existe très peu d’études expérimentales ou numériques sur la déformation plastique incrémentale. Cependant, peu de travaux expérimentaux ont été menés sur le sable en raison de l'extrême difficulté d'appliquer expérimentalement ces augmentations de contraintes. En effet, il faut séparer la déformation plastique de la déformation totale à chaque augmentation de la contrainte appliquée.
Mais de nombreuses études numériques et expérimentales peuvent être trouvées dans le domaine de la mécanique des sols.
![Figure 1.32 – Courbes isodensités (en pointillés) et potentielles (continues) obtenues pour une poudre de fer par Pavier [69] pour un essai normalement consolidé](https://thumb-eu.123doks.com/thumbv2/1bibliocom/462810.68736/77.892.181.647.189.531/courbes-isodensités-pointillés-potentielles-continues-obtenues-normalement-consolidé.webp)
Modèle numérique
Construction de l’échantillon numérique
Considérons la fonction de distance d (Figure 2.4) entre le nœud frontière de la particule A, noté nA, et la particule B, définie par. En supposant que le pieu est isotrope dans l'état initial, les principales directions de contrainte et de déformation sont supposées rester coaxiales tout au long de la simulation, de sorte qu'une charge axisymétrique en déformation entraîne une réponse de contrainte axisymétrique. L’une des difficultés du suivi des surfaces de déformation est de détecter l’entrée en plasticité lors du rechargement élastoplastique à partir du point de déchargement.
Figure 2.7 – Evolution de l'énergie dissipée lors de la détermination de la surface de charge : (a) Charge, (b) Décharge et (c) Recharge.

Choix de l’empilement initial
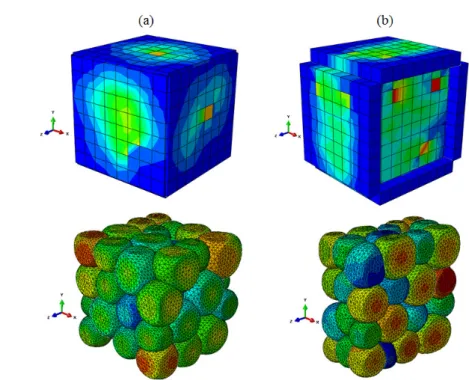
D'après le tableau 2.2, le temps de calcul évolue très rapidement avec le nombre de particules. Les autres tests numériques ont été réalisés avec des empilements plus grands en termes de nombre de particules (350 et 1000 particules) (Figure 2.11). Afin d'avoir un temps de calcul raisonnable pour le suivi des surfaces de charge, ces simulations ont été réalisées avec un maillage plus grossier afin de maintenir constant le nombre de degrés de liberté de l'ensemble de la pile.
Une augmentation du nombre de particules affecte une réduction significative de la taille de la surface de charge (Figure 2.12).

Simulation en contrainte
Mise en place du pilotage en contrainte
En réalité, le contrôle utilisé n'est pas un contrôle de contraintes, mais un contrôle de force, où tout l'espace de contraintes est balayé (figure 2.14.d) pour détecter l'entrée en plasticité (méthode citée en 2.2.2). Les deux surfaces de chargement à déformation et contrainte contrôlées sont très similaires et pratiquement identiques. La figure 2.16 montre que les deux surfaces de chargement sont proches l'une de l'autre et ont la même forme ; la zone vérifiée en traction est légèrement inférieure à celle vérifiée en déformation.
De plus, le contrôle des contraintes sera utilisé ultérieurement pour étudier l’écoulement plastique.
Étude de l’écoulement plastique
Selon cette équation, pour un état de contrainte donné de la surface de charge, la direction d’augmentation des contraintes est unique. Dans le cas général, la courbe enveloppe des incréments de déformation est une hypersurface dans un espace à 6 dimensions. En référence à l’équation (2.13), si la loi d’écoulement plastique est applicable et si le potentiel plastique existe, l’orientation de l’augmentation de la déformation plastique dεpl ne dépend pas de l’orientation de l’augmentation de la contrainte dσ.
A partir d'un état de contrainte donné, une série d'incréments de déformation de norme identique mais de directions différentes sont appliqués dans le plan de déformation déviant-volume.

Simulation en déformation
Dissipation d’énergie en fonction de la direction de
Test de validation : cas d’un matériau dense élasto-
La dissipation plastique est alors le produit scalaire de la contrainte et de l'incrément de déformation plastique : dEp=−→σ. La figure 3.9 montre les courbes d'enveloppe de déformation plastique associées à quelques points de la surface de chargement pour une compression isotrope jusqu'à une densité relative de Df = 0,9. Les amplitudes dσ utilisées pour différents points de la surface de charge sur la figure 3.9 sont expliquées dans le tableau 3.1.
Figure 3.11 – Courbes d'enveloppe associées à quelques points de la surface de charge d'un empilement de 50 particules. a) et (b) Compression isotrope, (c) et (d) compression matricielle jusqu'à une densité relative finale D = 0,9. On peut également constater l’effet du frottement sur la taille de la surface de charge. La tension standard augmente ||dσ|| = 0,1 MPa et différentes directions ont été appliquées à 7 points de la surface de chargement.
On remarque sur la figure 3.26.b que les courbes enveloppes de déformation plastique proches du point de chargement ne touchent pas les points de la surface de chargement. L'utilisation de courbes de déformation plastique a permis de caractériser l'influence de la direction de l'incrément de contrainte sur la direction d'écoulement.
Conclusion
Surfaces de charge
Évolution de la surface de charge avec la densité
Modification de la surface de charge lors d’un change-
La section 3.2 présente la première application liée à l'étude de la surface de charge avec la densité relative et les mécanismes de rotation de ces surfaces lors d'un changement de direction de charge. Dans cette section, une analyse des mécanismes d'évolution des surfaces de chargement avec le chemin de chargement est présentée. La surface de chargement s'oriente dans la direction du deuxième chemin, comme pour un chargement monotone.
Selon ces résultats, la surface de charge change lors du changement de direction du trajet de charge.

Écoulement plastique
Courbes enveloppes de déformation plastique
Influence du chemin de chargement et de la densité
Influence relative des énergies dissipées par plasticité
La figure 3.3.e montre en outre que pour observer la rotation de la surface de charge, une déformation plastique de faible amplitude est suffisante (ici caractérisée par une augmentation de la densité relative de 0,03 ou 0,5%). La figure 3.10 montre donc la courbe de déformation plastique associée au point D de la figure 3.9, dans le plan dévié. Enfin, la courbe enveloppe de déformation plastique pour le point B de la figure 3.9 correspond à 4.10−4, qui reste petite.
Figure 3.15 – Zoom sur deux courbes enveloppes associées à deux points de la surface de chargement d'un empilement de 50 particules soumis à une compression matricielle à D= 0,9 pour identifier la direction de l'écoulement plastique. Pour vérifier ce comportement, nous avons tracé sur la figure 3.22 les courbes enveloppes de l'énergie totale dissipée associées à quelques points de la surface de chargement dans le plan de déformation moyenne de contrainte anormale pour une compression isotrope jusqu'à Df = 0,98 et 0,7. Figure 3.26 – Courbes d'enveloppe associées à certains points de la surface de chargement d'un empilement de 50 particules comprimées selon un chemin de chargement isotrope à Df = 0,6 et avec un coefficient de frottement f = 0,5.
Chargement dilatant
Contrainte-Déformation en chargement dilatant
La figure 3.29.a montre l'évolution de la contrainte anormale (q) en fonction de la contrainte moyenne (p) pour le trajet de charge élastoplastique. L'évolution de l'aire de chargement sous l'influence du phénomène de dilatance a été étudiée par Pavier [69] à l'aide d'un test de surconsolidation. Il est alors intéressant d'utiliser les possibilités qu'offre le MEFMP pour observer l'évolution de la zone de chargement lors d'un tel chargement.
A partir du point C situé au bas de la surface de charge, une décharge élastique est appliquée au point A (figure 3.36.b).

Surface de rupture
Évolution de la surface de charge sous l’effet du phé-
42, 43] ont étudié comment l'échantillon numérique conserve la mémoire de la surface de charge formée par la première charge. En revanche, pour le trajet AB (pour lequel aucune diminution de surface de charge n'est observée) il n'a pas été possible de visualiser les pertes de contact. Les figures et 3.13 montrent la réponse du matériau dans le plan de contrainte moyenne-déformation anormale, qui correspond aux courbes enveloppes associées à différents points de la surface de chargement pour la compression isotrope et la compression matricielle à une densité relative finale Df et 0,6.
Ces figures montrent que pour les deux types de chargement et pour différentes valeurs de densité relative, la norme des stades de déformation plastique varie très considérablement d'un point à l'autre de la surface de chargement. Des chemins de recharge (cf. Étape 4, Chapitre 2) ont été appliqués à la pile numérique pour détecter les points sur la surface de la faille. Cette dernière étape a été réalisée trois fois pour tracer trois surfaces de charge afin d'identifier la transformation progressive de la surface de charge.
Conclusion
Cette étude a montré que le principal mécanisme de déformation plastique macroscopique est la déformation plastique des particules et qu'elle résulte de la croissance des surfaces de contact plutôt que d'un mécanisme de glissement entre les particules. Un comportement dilatant a été observé à travers les courbes enveloppes de déformation plastique détectées à proximité de la rupture dans le cas d'une compression isotrope pour Df = 0,6 et Df = 0,9. Un autre axe consiste à apporter davantage d'informations sur le phénomène de rupture en détectant les surfaces de fracture grâce au MEFMP.
Modélisation du compactage haute densité de poudres métalliques ductiles par la méthode des éléments discrets.
![Figure 1.12 – Schéma de la machine triaxial de révolution utilisée par Pavier [69].](https://thumb-eu.123doks.com/thumbv2/1bibliocom/462810.68736/50.892.217.726.198.605/figure-12-schéma-machine-triaxial-révolution-utilisée-pavier.webp)
![Figure 1.21 – La limite des méthodes utilisées par Martin et al. [62] et Storåkers [86] à une densité relative de 0,8 par rapport aux résultats expé-rimentaux de James [49]](https://thumb-eu.123doks.com/thumbv2/1bibliocom/462810.68736/61.892.253.571.201.523/figure-méthodes-utilisées-storåkers-densité-relative-résultats-rimentaux.webp)
![Figure 1.23 – Comparaison des contraintes macroscopiques sur l’échantillon de 32 sphères en compression isotrope avec les méthodes MEFMP et MED [42].](https://thumb-eu.123doks.com/thumbv2/1bibliocom/462810.68736/65.892.131.677.196.645/comparaison-contraintes-macroscopiques-échantillon-sphères-compression-isotrope-méthodes.webp)
![Figure 1.25 – Ajustement des paramètres du matériau sur un essai de com- com-pression simple homogène d’un échantillon cylindrique de plomb [16].](https://thumb-eu.123doks.com/thumbv2/1bibliocom/462810.68736/68.892.213.744.198.399/figure-ajustement-paramètres-matériau-pression-homogène-échantillon-cylindrique.webp)