Je tiens à remercier tout le personnel permanent du laboratoire GIPSA pour leur soutien, notamment les membres de l'équipe SYSCO. Tan-Phu Vuong qui m'a suivi et soutenu tout au long de mon parcours, mes professeurs de l'ESISAR, mes professeurs de Master et mon professeur au GI qui m'ont transmis avec passion leurs connaissances et leurs précieuses expériences, notamment chez Mr.
Notations
Introduction
- Motivation et Principe de la COHG
Nous pouvons résoudre le problème du contrôle optimal à horizon infini hors ligne, et le contrôle peut être implémenté sous la forme d'un retour d'état. La présence de contraintes rend le problème de contrôle optimal non linéaire et donc une formulation générale du contrôle sous forme de retour d’état devient très difficile, voire impossible.
Introduction
- Les systèmes de lois de conservation
Le principe COHG comprend les étapes suivantes : – A chaque instant t, on obtient l'état courant (t). De cette formulation, nous pouvons déduire les caractéristiques suivantes de COHG (voir [Findeisen, Imsland, Allgöwer & Foss, 2003], [Mayne & Michalska, 1990]).
Introduction lement modélisé par
- Etat de l’art sur la commande des systèmes de lois de conservationlois de conservation
- Résumé des contributions
- Organisation du mémoire
Une preuve complète de la stabilité du COHG pour certaines classes de systèmes linéaires en dimensions infinies. Dans le chapitre 3, nous discutons du COHG pour les systèmes hyperboliques 2×2 avec ordres aux limites.

Stabilité de la commande prédictive en dimension infinie
- Stabilité de la commande prédictive en dimension infinie
- Lemme de stabilité de la COHG
- Approche avec coût final
- Stabilité de la commande prédictive en dimension infinie Existence de la commande optimale
- Approche avec état final fixé à zéro
- Stabilité de la commande prédictive en dimension infinie Solution optimale
- Caractérisation de la commande optimale par l’état adjointl’état adjoint
- Stabilité de la commande prédictive en dimension infinie Alors, L u = 0 signifie que
- Calcul de la solution numérique
- Commande optimale avec état final fixé à zéro
- Stabilité de la commande prédictive en dimension infinie Comme précédemment, la condition L u = 0 signifie que
- Calcul de la solution numérique
- Problème de commande frontière
- Conclusion
Stabilité du contrôle prédictif en dimension infinie Existence d'un contrôle optimal Existence d'un contrôle optimal. Stabilité du contrôle prédictif en dimension infinie. Alors, Lu = 0 signifie que : Alors, Lu = 0 signifie cela.
Application de la COHG à des systèmes hyperboliques linéaires
- Régularité de la solution
- Atteignabilité d’un système hyperbolique 2 × 2 avec 2 commandes frontières
- Atteignabilité d’un système hyperbolique 2 × 2 avec 1 commande frontière
- COHG pour des systèmes hyperboliques 2 × 2
- Formulation abstraite
- Approche avec coût final
- Approche avec état final fixé à zéro
- Conclusions
En combinant les résultats sur la stabilité de COHG (Théorème 2.3.1) et sur l'accessibilité des systèmes hyperboliques 2×2 (Lemme 3.2.1), nous avons le résultat suivant. La première approche dépend de l’existence de la fonction de coût fini et ne peut s’appliquer qu’à certains systèmes particuliers.
Les équations de Saint-Venant linéarisées
Les équations de Saint-Venant linéarisées
- Introduction aux équations de Saint-Venant
On considère ici un écoulement dans un canal rectangulaire dont la longueur est L et la largeur est B. L'écoulement et la hauteur d'un tel écoulement sont classiquement modélisés par les équations dites de Saint-Venant, qui sont obtenues à partir des lois de conservation de la quantité de mouvement et masse sous certaines hypothèses. Ces hypothèses sont : la pente est faible, la longueur est bien supérieure à la hauteur d'eau, la répartition de la pression est hydrostatique, le fluide est incompressible, et enfin la viscosité intrinsèque est négligée (voir [Litrico & Fromion, 2009b]).
Les conditions aux limites sont spécifiées par les équations de valve à x= 0 et à x=L (voir [Graf & Altinakar, 2000]). Désormais, par souci de simplicité, la notation tilde˜ sera omise, et nous utiliserons fα pour désigner la dérivée de f en α, et ¯f pour désigner la valeur de f à l'état d'équilibre (¯h,Q).
Les équations de Saint-Venant linéarisées Posons
- Modèle linéarisé autour d’un profil uniforme
- Stabilisation
Dans ce régime, selon la relation entre la pente I et le frottement J(¯h,Q), on a différents profils de ¯h. Dans [Coron et al., 2007], les auteurs ont proposé une fonction de Lyapunov pour dériver les commandes aux limites qui stabilisent le système non linéaire (4.1.1) dans le cas d'un canal sans pente ni frottement. Cette fonction de Lyapunov est simplifiée dans [Coron et al., 2009] pour les équations de Saint-Venant linéarisées avec pente et frottement autour d'un profil uniforme.
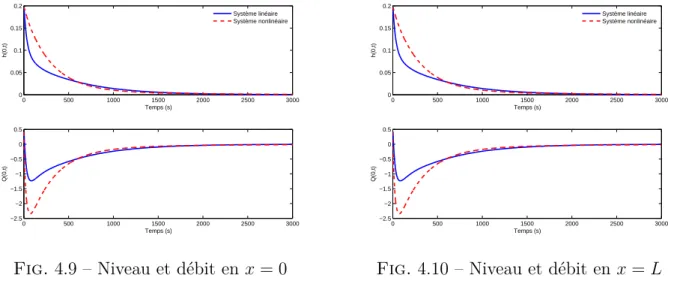
L'analyse de stabilité de ce système par la méthode de caractérisation a été envisagée dans [Prieur et al., 2008] et [Halleux et al., 2003]. Sur la base des analyses de stabilité présentées dans le chapitre précédent, nous étudierons dans ce qui suit deux approches COHG pour stabiliser deux modèles linéarisés du système (4.1.1) : autour d'un profil d'équilibre uniforme et autour d'un profil d'équilibre non uniforme.

- Validation par simulation
- Modèle linéarisé autour d’un profil non uniforme
- Méthode de Galerkin
- Application à l’approximation de la commande
- Résultats de simulation
- Conclusion
Puis, pendant la période [t, t+ ∆t] de la phase d'épandage, la nouvelle distribution se déplace vers le lieu voisin dans le sens de la vitesse. Nous devons maintenant utiliser un schéma de discrétisation pour obtenir une approximation du contrôle optimal pouvant être implémenté. Considérons le problème où nous voulons trouver la solution f(x, t) de l'équation abstraite suivante :. 4.3.3) On suppose que la solution approchée a la forme
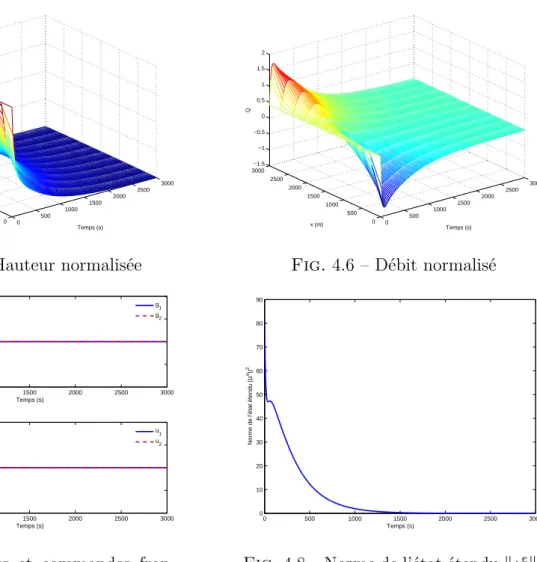
Les évolutions normalisées de hauteur de charge et de débit sont données dans les figures 4.14 et 4.15, tandis que les états et commandes sont présentés dans la figure 4.16. Enfin, soulignons que le calcul du contrôle optimal à chaque point d'échantillonnage prend environ 10 secondes pour un ordinateur portable Intel Core 2 Duo 2,4 Ghz, 1,95 Go RAM.

La COHG pour un réseau de systèmes hyperboliques 2 × 2
- Réseau de systèmes hyperboliques 2 × 2 en cas- cade
- Existence de la solution
- Atteignabilité
- CHOG pour un réseau de systèmes hyperbo- liques 2 × 2 en cascadeliques2×2en cascade
- Formulation abstraite
- Stabilité de la COHG avec état final fixé à zéro
- Application à un réseau de canaux d’irrigation
- Validation par simulation
- Conclusions
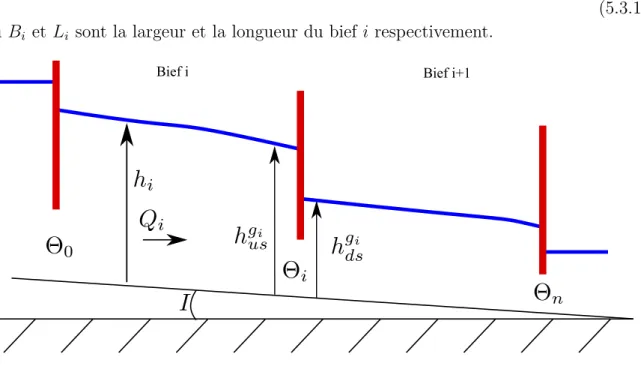
COHG pour un réseau de systèmes hyperboliques 2×2 lois de conservation, il est possible de consulter par exemple [Dick et al., 2010] pour un réseau de conduites de gaz ou [Gugat et al., 2010] pour un réseau de trafic routier. Dans la suite, nous utiliserons COHG pour stabiliser le système (5.3.1) linéarisé autour d'un profil d'équilibre non uniforme (¯hi(x),Q¯i(x)), i = 1,. 0 ziTQizidx+gTPfg+uTRu, Qi, Pf, R> le système de canaux d'irrigation peut également être stabilisé par l'approche COHG avec l'état final mis à zéro, ce qui sera illustré par la simulation réalisée dans la section ci-dessous -Après.
Dans ce chapitre, nous avons montré que COHG peut être utilisé pour stabiliser le réseau de systèmes hyperboliques 2×2. A noter qu'il subsiste un écart entre COHG en dimension infinie et son approximation en dimension finie car la convergence du schéma numérique vers une solution exacte n'a pas été établie.
COHG pour une classe de systèmes de lois de conservation scalaires non
- La stabilité des systèmes hyperboliques scalaires avec commande frontière
- COHG pour des systèmes de lois de conservation scalaires de départ, nous proposons dans cette étude une méthode pour éviter ces situations dans
- Les conditions pour éviter le choc
- COHG pour des systèmes de lois de conservation scalaires l’équation dx
- La stabilité
- COHG pour des systèmes de lois de conservation scalaires où τ est déterminé par une relation implicite
- La stabilité par COHG
- COHG pour des systèmes de lois de conservation scalaires
- COHG pour des systèmes de lois de conservation scalaires où nous avons introduit une nouvelle variable ¯z = ¯ w − a r et
- Les conditions pour éviter le choc en présence d’une per- turbation mesurableturbation mesurable
- COHG pour des systèmes de lois de conservation scalaires doit être également une fonction croissante. Nous obtenons alors la condition suivante
- La solution de la commande optimale
- Exemple
- COHG pour des systèmes de lois de conservation scalaires Supposons que la commande agit au point x = 0
- Résultats de simulation
- Conclusion
Cette condition garantit que la valeur de la condition dans le domaine [0,1] est déterminée par celle à la limite x = 0. Dans ce paragraphe nous montrerons que la convergence de la valeur à la limite vers une référence donnée conduit à la convergence de valeur sur l'ensemble du domaine. La fonction de coût J peut être décomposée en 2 parties : l'une sous l'effet de la condition initiale et l'autre sous l'effet de l'affectation au point x= 0.
Afin d’éviter la contrainte non linéaire de (6.2.4), elle peut être remplacée par la contrainte ¯u ∈ Uad. On peut considérer une fonction de coût plus simple qui ne considère que l'état limite x= 0 comme suit : 6.2.12).

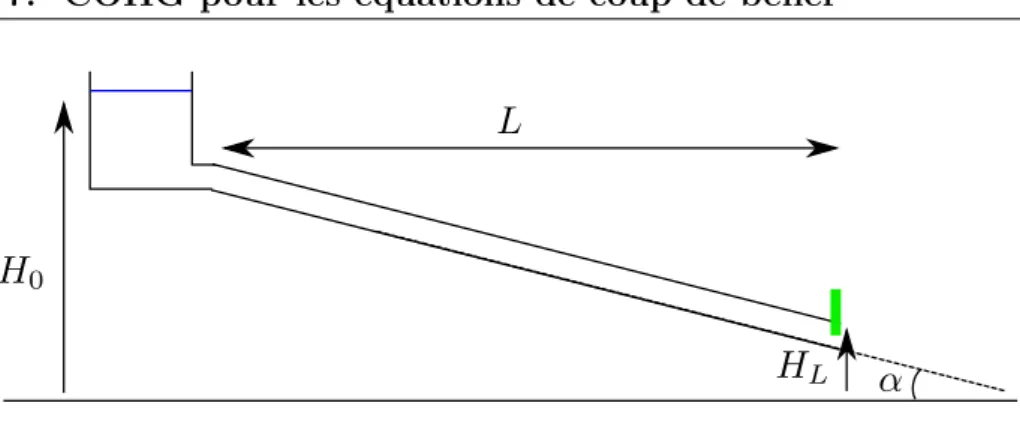
COHG pour les équations de coup de bélier
- Introduction
- COHG pour les équations de coup de bélier
- Formulation abstraite
- COHG pour les équations de coup de bélier où z 0 = (w 0 y 10 y 20 ) T et
- COHG pour les équations de coup de bélier l’opérateur S : Z → Z
- COHG pour les équations de coup de bélier Nous rappelons la définition d’un semigroupe de contraction
- Stabilité
- COHG pour les équations de coup de bélier pour un certain p > a
- COHG pour les équations de coup de bélier avec τ = t − L − x
- COHG pour les équations de coup de bélier Considérons une suite de fonctions { ǫ n } ⊂ C 1 ([0, ∞ )) telles que
- Application de la COHG
- COHG pour les équations de coup de bélier la contrainte pour assurer la stabilité
- Calcul de la commande optimale
- COHG pour les équations de coup de bélier alors, en utilisant (7.4.15)
- Résultat de simulation
- Conclusion
Premièrement, le système n'est pas autonome car on souhaite laisser le libre choix de l'affectation pour minimiser ultérieurement un critère. Puisque le contrôle optimal satisfait la condition du théorème 7.3.1, la stabilité de la boucle fermée est garantie. L'évolution du niveau piézométrique et celle de la vitesse sont représentées sur les figures 7.4 et 7.5.
L'évolution de l'état w et celle de la commande ˜u dans les deux cas (le COHG et la commande par retour d'état (7.5.1)) sont présentées. Il est vrai que le COHG n'est pas indispensable à la stabilisation, mais il offre l'avantage de l'optimisation d'un critère et de la prise en compte des contraintes.
Conclusions et Perspectives
Conclusions et Perspectives
Nous avons également étudié l'application de COHG aux systèmes de lois de conservation scalaires non linéaires. Enfin, l'utilisation du COHG pour le problème de stabilisation d'un pipeline sous pression a été envisagée. La première piste concerne l’application du COHG aux réseaux de lois de conservation.
Enfin, l’application du COHG au réseau routier apporte également un grand intérêt pour éviter les embouteillages. La deuxième piste concerne le problème de stabilité du COHG à partir des réactions de production.
Annexe A
Rappel des principaux résultats de la commande optimale en dimension
Le contrôle optimal aboutit à une dimension infinie. De plus, il existe une constante positive M telle que. Alors pour z1, z2 ∈ D(A) et t ∈ (t0, te), la fonction hz1,Π(t)z2i est dérivable et satisfait l'équation différentielle de Riccati de l'opérateur. De plus, c'est la solution unique de cette équation différentielle d'opérateur dans la classe des opérateurs fortement continus et auto-adjoints dans L(Z) telle que hz1,Π(t)z2i est différentielle pour z1, z2 ∈D(A) et t . ∈(t0,te).
Considérons maintenant le problème d'optimisation de (A.0.5) avec un état final fixe z(te) = z1 et la fonction de coût suivante.
Annexe B
Preuve de la régularité de la
La condition nécessaire pour que la solution z de (B.0.1) soit dans la classe Cp([0, T];Hs−p(Ω)), 0≤p≤s, est la condition de compatibilité suivante. Premièrement, nous avons le résultat suivant concernant l'existence d'une solution au problème avec une condition aux limites homogène (c'est-à-dire g = 0 dans B.0.1)). Nous donnons maintenant un résultat concernant la régularité de la solution du problème avec une condition aux limites homogène (B.0.10).
Supposons maintenant que f et F soient des données générales qui satisfont aux hypothèses du théorème B.0.2, et considérons les séquences {fn} et {Fn} qui satisfont aux conclusions du lemme B.0.5.
Annexe C
Structure des matrices du système discrétisé par la méthode de
Galerkin
Bibliographie
2007], 'A strict Lyapunov function for boundary control of hyperbolic systems of conservation laws', IEEE Transactions on Automatic Control 52, 2 – 11. 2006], 'Predictive Control of Parabolic PDEs with State and Control Constraints', International Journal of Robust and non-linear control. 2006], 'Predictive control of parabolic PDEs with state and control constraints', International Journal of robust and non-linear control.
1973], 'Quadratic performance measures in boundary control of linear symmetric hyperbolic systems', SIAM Journal of Control. 2008], "Open channel boundary control with numerical and experimental validations", IEEE Transactions on Control Systems Technology.
English summary
THÈSE
DOCTEUR DE L’UNIVERSITÉ DE GRENOBLE
Van Thang PHAM
Contribution
Bernhard MASCHKE
Jean-Michel CORON
Panagiotis D. CHRISTOFIDES
Denis DOCHAIN
Didier GEORGES
Gildas BESANÇON
Résumé
Abstract
Introduction
- Motivation and principle of RHOC
The reason for employing RHOC lies in its ability to treat optimal control problems where off-line calculation of the control law is difficult or impossible. The optimal control for linear systems has long been well studied and has reached a certain maturity (see e.g. [Kirk, 1998]). We can solve the infinite horizon optimal control problem offline, and the control can be implemented in the feedback form.
The presence of constraints makes the optimal control problem non-linear and therefore it is not easy to obtain a general formula of the control in the feedback form. The fact that the optimal control can only be calculated for a specified condition motivates the use of RHOC.
Introduction
- Systems of conservation laws
- State of the art in control problem for systems of conservation laws
- Contributions summary
- Thesis outline
The first part of the optimal control is applied to the system during the period [t, t+σ) for smallσ, and the procedure is repeated at t=t+σ. From a mathematical point of view, the boundary checks on the system operate through an unbounded operator, which requires more attention in the analysis of the solution. The interactions between subsystems create a new challenge for the analysis and stabilization of the whole system.
First, our work makes contributions to the stability problem of the infinite-dimensional RHOC strategy. As previously mentioned, one of the advantages of RHOC is the ability to consider constraints and one of the challenges of systems of conservation laws is the presence of discontinuities (shocks) in the solution.

Exponential stability of