Dans cet article, nous proposons une solution à ce problème pour le cas des réseaux de Petri ordinaires et généralisés. Dans le 5ème chapitre nous nous sommes intéressés à la généralisation de l'idée de la classe des réseaux de Petri généralisés.

Introduction
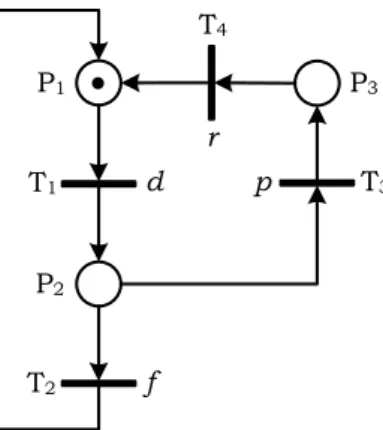
A partir de l'état de panne, la réparation de la machine – événement r – la ramène à son état d'origine. La machine termine le premier cycle d'usinage à l'instant t2 (événement f), démarre un nouveau cycle à l'instant t3 (événement d), tombe en panne à l'instant t4 (événement p) et est réparée à l'instant t5 (événement r).

Langages
Définitions
Opérations avec les langages
Langages réguliers
Pour faire correspondre un langage unique à chaque expression régulière, les opérateurs sont placés dans l'ordre de priorité suivant. Étant donné un alphabet Σ, l'ensemble des langages finis au-dessus de Σ est inclus dans l'ensemble des langages réguliers (figure 1.2).
Automates
Notions fondamentales
Différents chemins sont possibles pour passer de l’état initial q0 à l’état final q3, tels que : δ(q0, abc), ou δ(q0, acb), ou δ(q0, cbaa). On appelle état accessible de A tout état qk ∈ QA pouvant être atteint par l'automate à partir de son état initial et en traversant les transitions d'état impliquées par un mot s ∈ Σ∗A.

Composition synchrone
Chaque état de cet automate est un couple (qi, xj), où qi est un état de AD1 et xj est un état de AD2. Un premier changement d'état se produit alors lorsqu'une des conditions nécessaires à la libération d'un jeton est remplie : soit une pièce est détectée à l'entrée du distributeur (q0 −→p q1), soit le bouton est imprimé ( x0 −→ bx1).
Machine de Moore
Le modèle global du distributeur (récepteur AD de la figure 1.4) est obtenu en reliant les deux contraintes de fonctionnement illustrées par AD1 et AD2, c'est-à-dire que la séquence d'entrée S = aaba entraîne la machine depuis son état initial q0, où la sortie de l'automate est égal à 0, dans l'état q1, où la sortie a la valeur 1.
Réseaux de Petri
- Définitions
- Franchissement des transitions
- Graphe de marquages
- Propriétés
- Composition synchrone
L'ensemble des sites étiquetés avec n'importe quel état RdP est donné par une fonction support définie comme suit. La fonction Support(X) du vecteur X ∈N∗ est telle que : Support(X) = L'ensemble des endroits marqués dans le vecteur X.
Conclusions
L'importance du concept de contrôlabilité pour la théorie de la supervision SED sera clarifiée dans les sections suivantes. C’est pour ces raisons que de nombreuses tentatives ont été faites pour adapter la théorie générale du contrôle SED à d’autres formalismes de modélisation ([Uzam & Wonham, 2006], [Li & Wonham, 1994], [Hollay &.
Le concept de la commande par supervision
Le schéma de supervision
Étant donné un état q ∈ Q du processus, on note Σ(q) l'ensemble des événements qui peuvent être générés par le processus à partir de cet état, et Φ(q) la liste des événements interdits par la spécification (l'action de contrôle) capable q. Dans chaque état q, le processus connecté au contrôleur reçoit en entrée la liste des événements interdits Φ(q) et sort l'ensemble des événements possibles et autorisés, Σ(q)\Φ(q). Il va sans dire que le processus contrôlé peut être défini de manière analogue en spécifiant en entrée la liste des événements autorisés, Σ\Φ. Le fonctionnement du processus connecté au contrôleur, appelé fonctionnement en boucle fermée, est représenté sur la figure 2.2c.

Contrôlabilité
Ensuite, le contrôleur est défini en fonction du langage de processus sur l'ensemble des sous-ensembles de ΣC:S:L(P)→2ΣC. Étant donné deux langages L1 et L2, les déclarations suivantes peuvent être faites sur la contrôlabilité des opérations impliquant L1 et L2. Un langage K est contrôlable si, et seulement si, son préfixe de fermeture, K, est contrôlable. b) [Condition de contrôlabilité :] Si dans la définition 2.2.1 on considère K comme langage de spécification et L le langage de processus, avec K ⊆ L,K 6= ∅, on dit que le langage de spécification est contrôlable par rapport au langage de le processus si : ∀mot ω∈ K, ∀σ∈ΣU : ωσ∈ L ⇒ωσ ∈ K .
Définitions
Synthèse du contrôle
- L’idée
- L’algorithme de Kumar
- Exemple d’un système manufacturier
- Avantages et inconvénients de la théorie de Ramadge & Wonham 39
- La méthode des invariants
- La théorie des régions
- Contrôle des blocages en utilisant les siphons
- Contrôle par retour d’état
Soit P = (Q,Σ, δ, q0) le modèle accepteur du processus et Sspec = (V,Σ, ξ, v0) le modèle de la spécification que l'on veut lui imposer. L'idée est d'utiliser un point de contrôle pour inclure la spécification dans tous les composants conservateurs du système contrôlé. Il s'ensuit que pour inclure la spécification dans l'ensemble des composantes conservatrices R de l'inégalité de contrainte, la quantité mC =b−lT ·M doit être ajoutée.

Conclusions
Malheureusement, le problème de la détermination d'un ensemble approprié et complet de contraintes permettant le calcul d'un contrôleur maximalement permissif devient beaucoup plus compliqué avec l'intrusion de l'incontrôlabilité dans les modèles. De plus, nous disposons de modèles de processus et de spécifications depuis la création du RdP. Notre travail se situe donc avant la méthode invariante et se réfère à la phase de planification des contraintes admissibles pour cette dernière.
États autorisés et interdits d’un RdP
Les ensembles complets d'états interdits et d'états autorisés pour ce système, ainsi que l'ensemble pertinent d'états accessibles, sont les suivants. Une fois que tous les ensembles d'états interdits et autorisés ont été identifiés, il est possible de calculer le langage vérifiable suprême du système en boucle fermée en appliquant l'algorithme de Kumar au graphe de marqueurs. Malheureusement, ce type de synthèse de contrôleur implique la suppression des états limites interdits, faiblement interdits et interdits des graphiques de marqueurs.

Contraintes admissibles
1.4.1 : a) spécifications non conservatrices ; b) modèle de système en boucle fermée ; c) la grille de marquage correspondante. Cette restriction n'est pas acceptable, car une étude attentive des ensembles d'états du système révèle que, même si elle interdit l'état P1P2P3P63, elle interdit également un état autorisé : P12P3P63 ∈ MA. Même si la violation des comportements souhaités du système n’est pas trop grave dans ce cas particulier, il convient de noter qu’il s’agit d’un exemple très simple.

Optimalité structurelle
Le chevauchement (total ou partiel) du support entre les états interdits et les états autorisés rend la solution de contrôle intuitive - la restriction des jetons de somme non pondérés - devenue trop restrictive pour cette classe de modèles. Parmi les résultats présentés dans le 5ème chapitre de cette thèse, nous proposerons également un algorithme pour obtenir le contrôleur maximum permissif-minimum en termes de nombre d'emplacements et d'arcs de contrôle. L'optimalité de la contrainte sera prise en compte dans la technique pour déterminer les contraintes admissibles.
Conclusions
En particulier, le nombre d'opérations reste considérable malgré la complexité (généralement) polynomiale des algorithmes. Détermination des contraintes pour la synthèse d'un contrôleur optimal pour les réseaux de Petri sécurisés. Dans ce chapitre, une technique de définition de contraintes est présentée, qui permet la synthèse, par la méthode des invariants, d'un contrôleur maximal autorisé pour les réseaux de Petri, sauf qu'elle n'est pas nécessairement conservatrice.
L’importance de la conservativité
Synthèse de contrôleur pour les RdP saufs conservatifs
Figure 4.1 : Étapes de la procédure de synthèse du contrôleur mettant l'accent sur l'équivalence contrainte - état interdit associé. contrôleur optimal pour les réseaux de Petri sécurisés. e). Le schéma du système de fabrication, ainsi que les modèles RdP du procédé, la contrainte de stock (spécification) et le fonctionnement souhaité en boucle fermée sont présentés dans la Figure 4.2, à côté du graphique correspondant des marquages disponibles en boucle fermée (Figure 4.2 e). L'optimalité du contrôleur ainsi obtenu est également assurée dans le cas où les modèles du procédé et/ou de la spécification sont non conservateurs.

Problèmes posés par l’hypothèse de non-conservativité
Même s'il est possible de trouver des cas favorables de modèles non conservateurs dans lesquels il est possible de calculer un régulateur maximum admissible par la méthode des invariants, l'opération de synthèse donne des résultats insatisfaisants dans le cas général. 4.2.1 : a) modèle RdP de la spécification non conservatrice ; b) modèle RdP de fonctionnement en boucle fermée ; c) un tableau de marqueurs en boucle fermée pertinent ; d) solution de contrôle optimale (R&W) ; e) Modèle RdP du système contrôlé par la méthode invariante classique ; f) graphique de marquage du système contrôlé. Cela nous permet de calculer la matrice d'incidence et le marquage initial du contrôleur.

Synthèse de contrôleur pour les RdP saufs non-conservatifs
- Redéfinition des contraintes
- Passage d’un modèle non-conservatif à un modèle conservatif
- Élimination des marquages complémentés
- Exemple
De plus, la transformation est systématique et peut être effectuée à partir de la matrice d'incidence du modèle. Il est désormais possible d'éliminer les signes remplis de notre structure de contraintes afin de pouvoir les utiliser avec la méthode des invariants. Deuxièmement, c’est le partitionnement de la contrainte en sous-ensembles disjoints de tokens qui est réalisé.

Conclusions
Détermination des contraintes pour la synthèse du contrôleur optimal pour les réseaux de Petri ordinaires et généralisés. Ce chapitre présente une technique de détermination de contraintes qui permet la synthèse, par la méthode des invariants, du contrôle maximum admissible pour les réseaux de Petri généralisés. L'objectif est de développer une technique pour déterminer les contraintes admissibles de la méthode invariante qui produira toujours un ensemble de contraintes caractérisant le contrôleur optimal, si un tel contrôleur existe.
Contraintes et optimalité dans le contexte des RdP généralisés
Étant donné le modèle RdP du système en boucle fermée, nous utilisons d'abord l'approche R&W pour déterminer deux ensembles nécessaires et suffisants pour calculer le contrôleur optimal : le comportement admissible, MA, et l'ensemble limite des états interdits, MB. L'ensemble des états interdits contient un sous-ensemble qui présente un grand intérêt pour la synthèse des contrôleurs : l'ensemble Mo d'états interdits qui sont accessibles à partir de l'ensemble des états autorisés via des transitions contrôlées. Par conséquent, il est nécessaire de trouver une technique pour déterminer les contraintes admissibles qui assure une transition biunivoque (équivalence) entre un ensemble d'états interdits et un ensemble de contraintes.
Détermination des contraintes admissibles
La figure 5.1 présente un schéma du système en boucle fermée et RdP modélise le processus, les spécifications et le fonctionnement en boucle fermée souhaité. Car l'espace d'état défini par la contrainte doit être caractérisé par un ensemble d'états qu'il confirme, c'est-à-dire de l'État qui les permet, il s'ensuit naturellement qu'il s'agit d'une restriction de forme. En gardant à l’esprit que le système (5.3.1) est généralement surdéterminé, une contrainte de complexité minimale (« limite optimale » dans la figure 5.3) peut être calculée comme solution au problème d’optimisation suivant.

Synthèse de contrôleur
L'espace d'état du MCB défini par l'ensemble des contraintes CB obtenu par l'algorithme 5.1 est égal à l'espace d'état autorisé du système. L'ensemble des états accessibles du MCB défini par l'ensemble des contraintes (CB) est égal à l'ensemble des états accessibles du contrôleur MAC. Le contrôleur obtenu par la méthode invariante à partir de l'ensemble des contraintes obtenues par l'algorithme 5.1 est optimal.

Optimalité structurelle
Si ce n’est pas le cas, il faut démarrer l’analyse par sous-ensemble ; c'est-à-dire qu'il est nécessaire de vérifier dans un premier temps tout sous-ensemble S1 de K= Map[MB]-1 états, puis tout sous-ensemble S2 de K= Map[MB]-2 états, et ainsi de suite immédiatement jusqu'à ce qu'une solution de sous-ensemble soit trouvée. déterminé. Supposons qu’une telle solution soit trouvée pour le sous-ensemble Si de K= Card[MB]−istates. Si le sous-ensemble actuel fournit une solution de sous-ensemble, AS = [aSj], passez à l'étape 6.

Étude de cas
P8 Pièce en attente de sortie de la zone d'assemblage. P9 Pièce en cours de sortie de la zone d'assemblage. P11 Aucune pièce n'attend de sortir de la boucle d'assemblage. P12 Pièce en attente de sortie de la boucle d'assemblage. Le contrôleur optimal minimum de la chaîne d'assemblage de la figure 5.7 peut donc être calculé.
Conclusions
Nous sommes donc revenus à la définition fondamentale du problème et à l’idée d’une relation entre la théorie R&W et la méthode des invariants. Sur la base de ces hypothèses, nous avons développé une technique pour déterminer les contraintes admissibles pour la méthode invariante, qui produit toujours un ensemble de contraintes caractérisant le contrôleur optimal, si un tel contrôleur existe. 2003b], « Logique de contrôle de rétroaction pour les problèmes d'état interdit des graphes marqués : application à un système de production réel », IEEE Trans.

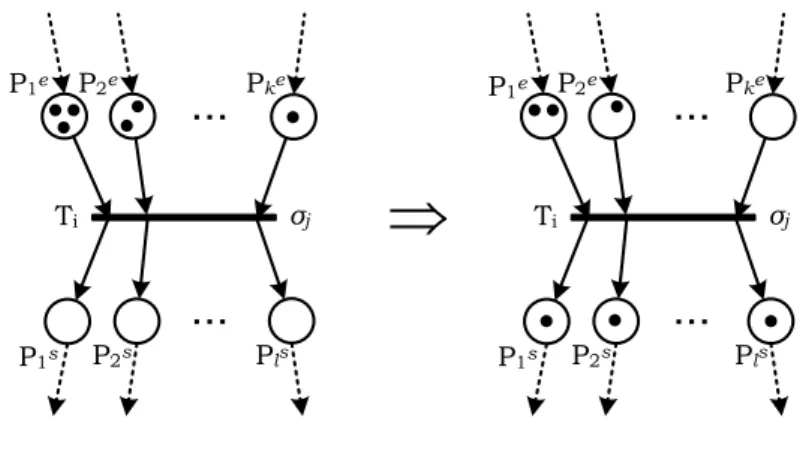
Transition contrôlée par retour d’état
Modèle du système manufacturier de l’exemple 3.2.1
Graphe de marquages accessibles du système de l’exemple .1
Graphe pertinent de marquage du système de l’exemple 3.2.1
Modèle RdP non-conservatif
Modèle contrôlé du RdP non-conservatif
Étapes de la procédure de synthèse de contrôleur
Modèle du système manufacturier de l’exemple .1
Modèle contrôlé pour l’exemple 4.2.1
Variante non-conservative du système manufacturier de l’exemple 4.2.1 . 70
Un RdP non-conservatif et son RdP conservatif équivalent
Modèle conservatif et implémentation du contrôle pour le système de la
Modèle contrôlé pour le système de la figure 4.4
Modèle du système manufacturier de l’exemple 3.2.1
Représentation de la frontière
Représentation de la frontière optimale
Le système commandé pour le système de la figure 5.1
Modèle RdP du système commandé avec le contrôleur optimal minimal
Graphe de marquage du système commandé avec le contrôleur optimal
Ligne d’assemblage
Modèles RdP du procédé et de la spécification pour la figure 5.7
Modèle RdP du fonctionnement désiré en boucle fermée pour la figure 5.7 106