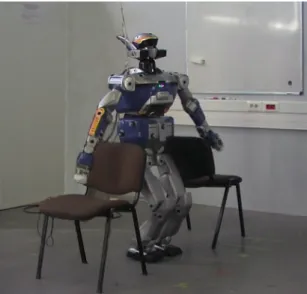
[PENDING] Dynamic Walking and Whole-Body Motion Planning for Humanoid Robots: an Integrated Approach
31
0
0
Texto
Imagem
+7
Documentos relacionados