Une autre façon d'évaluer l'élasticité des tissus consiste à examiner la deuxième grande famille d'ondes, les ondes de cisaillement. Il détaille l'élastographie impulsionnelle et explique les principes de la sonde acoustique et de l'imagerie ultrasonore ultrarapide.
L’élastographie, un vaste domaine de recherche
Elastographie statique
A partir de la relation 1.4, on voit que la contrainte unidirectionnelle est liée aux contraintes dans la même direction par le module d'Young. Mais elle est aussi liée aux déformations dans les axes perpendiculaires à la contrainte par le rapport du module d'Young et du coefficient de Poisson.

Elastographie dynamique
En revanche, dans le cas des organes internes, son utilisation semble peu probable car l'application d'une tension statique uniforme sur toute la zone imagée est impossible. Dans son expérience, un vibromasseur stimule les muscles de la cuisse à une fréquence de 10 Hz.
A. Sonoélastographie
Pour dépasser les préjugés précédents, ces chercheurs se sont intéressés à la vitesse de propagation des ondes de cisaillement. Le module d'Young du milieu étudié est directement lié à la vitesse de propagation des ondes de cisaillement.

B. Elastographie par résonance magnétique
La sensibilité de cette méthode aux conditions aux limites pose donc le problème de l'interprétation des cartes de phase des ondes de cisaillement. Le module de cisaillement est obtenu avec le rapport 1,5 en exprimant la vitesse en fonction de la fréquence d'excitation et de la longueur d'onde.

C. Elastographie impulsionnelle
Un transducteur à ultrasons focalisé (3 MHz) éclaire un échantillon pendant la propagation des ondes de cisaillement. Les signaux ultrasonores enregistrés permettent alors de suivre les déplacements induits dans l'environnement par la propagation des ondes de cisaillement.
C.1. Déplacements induits par une impulsion acoustique
Par régression linéaire sur la phase à la fréquence centrale de l'onde de cisaillement en fonction de la profondeur, on obtient une bonne estimation de la vitesse de phase de l'onde (Fig. 9). 9 : Retard de phase de l'onde de cisaillement à la fréquence centrale (100 Hz) en fonction de la profondeur.

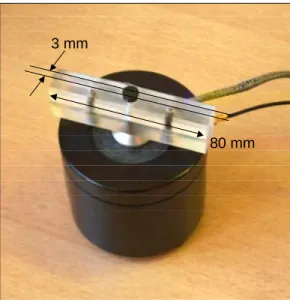
C.2. Le palpeur acoustique
Le faisceau ultrasonore et les deux faisceaux qui génèrent l'onde de cisaillement sont situés sur le côté gauche de l'image. Le front d'onde de cisaillement se déforme et s'accélère lors de sa traversée du confinement.

Conclusion
Théorie des ondes élastiques en milieu transverse isotrope
A. Cas général
Dans notre cas nous ne nous intéressons qu'à la propagation des ondes selon l'axe perpendiculaire aux fibres musculaires (selon l'axe x ou z). En conséquence, les vitesses et les polarisations des ondes planes se propageant le long de la direction de l'axe de profondeur sont obtenues en recherchant les valeurs propres (réels positifs) et les vecteurs propres (deux des deux orthogonaux) du tenseur de Christoffel, respectivement.

B. La polarisation des ondes de cisaillement
Pour chaque position de colonne, le champ de déplacement est calculé et le taux de cisaillement le long de l'axe de contrainte z est mesuré. La polarisation de l'onde de cisaillement dans l'axe ultrasonore reste longitudinale, selon l'axe z.

Résultats expérimentaux
Le point important de ce paragraphe est que l'utilisation d'une barre favorise le champ de déformation de l'onde de cisaillement dans une direction perpendiculaire à elle-même (axe des abscisses). De ce fait, dans la suite de la thèse, nous ferons un amalgame entre le champ de déformation d'une onde de cisaillement polarisée et une onde de cisaillement polarisée.
A. Expérience in vitro
On mesure alors la vitesse de l'onde de cisaillement pour une impulsion de fréquence centrale de 100 Hz (Fig. Quelle que soit la position de la tige, la vitesse de l'onde de cisaillement reste constante : VS m/s moyenne.
B. Expérience in vivo
9 : Développement du taux de cisaillement en fonction de la rotation de la tige par rapport aux fibres musculaires sur le biceps humain in vivo. Bien que ces résultats in vivo soient inférieurs en termes de taux de cisaillement, ils sont cohérents avec les résultats de simulation et les expériences in vitro.

Conclusion de ce chapitre
C'est dans ce but que nous avons réalisé une collaboration avec l'Institut de Myologie de l'hôpital « la Pitié Salpetrière. Lhermitte, "Anisotropie des propriétés élastiques des composites carbone/époxy - Etude de la propagation et de la diffusion et de la diffusion ultrasonore", Mémoire Université Paris VI, Sp.
Théorie de l’acoustoélasticité
Nous avons donc voulu quantifier ces paramètres non linéaires en estimant l'anisotropie induite dans le milieu. Enfin, nous discuterons les résultats expérimentaux et leur lien avec les coefficients non linéaires définis par L.
A. Formulation générale
En introduisant l'expression du tenseur de Piola-Kirchhoff (3.2) et l'expression de l'énergie interne (3.3) dans l'équation du mouvement (3.1) et en tenant compte du tenseur de déformation (3.4), l'équation devient généralement élastique non linéaire. En supposant que le milieu est homogène, que les déformations statiques induites sont uniformes et que les déformations dynamiques sont faibles, l'équation du mouvement devient (3.5).
B. Validation de l’utilisation du palpeur acoustique
Pour chaque paire de vitesses, le champ de déplacements des ondes de cisaillement est calculé lorsque la barre est parallèle (a) et perpendiculaire (b) à l'axe des contraintes. Pour chaque couple de vitesse, nous préférons l'onde de cisaillement lente lorsque la barre est parallèle à l'axe de contrainte (Fig.

Expérience sur un gel d’Agar-gélatine
A. Montage expérimental
B. Résultats et discussion
5, les modules de cisaillement parallèle et perpendiculaire sont représentés en fonction de la contrainte appliquée. 5 : Modules de cisaillement expérimentaux parallèles (étoile rouge) et perpendiculaires (cercles noirs) à l'axe de contrainte en fonction de la contrainte appliquée.

Onde transverse choquée
Propagation non linéaire dans les solides : rappel théorique
Dans cette partie, nous nous intéressons au cas isotrope sans viscosité, et nous allons dévoiler les considérations théoriques qui permettent d'écrire les équations de propagation non linéaires dans le cas de la compression plane et des ondes de cisaillement. Ce développement nous conduira aux équations de Burgers, qui permettent de simuler numériquement la propagation non linéaire de chacune des deux ondes.
A. Ondes longitudinales d’amplitude finie
Le profil de l'onde de choc apparaît alors au-delà de la distance d'impact (z = 2LCP, z = 3LCP). 2 : Contenu spectral d'une onde plane longitudinale lors de sa propagation à différentes distances de la source.

B. Ondes transverses d’amplitude finie
L'évolution de la forme temporelle de l'onde de cisaillement à différentes distances de la source proportionnelle à la distance de choc est représentée sur la Fig. 4 : Contenu spectral de l'onde plane de cisaillement lors de sa propagation à différentes distances de la source.

Observation expérimentale d’ondes transverses choquées
La vitesse des particules de l'onde de cisaillement de faible amplitude en fonction du temps est présentée à différentes positions de la source dans la figure suivante. L'évolution du contenu spectral de l'onde de cisaillement en fonction de la profondeur est représentée sur la Fig.

B.1 Evolution des harmoniques
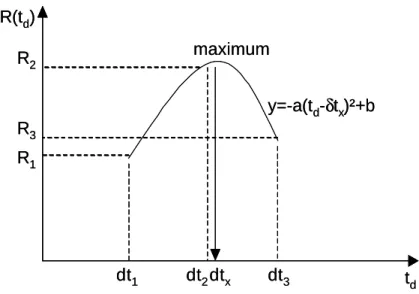
Par une régression avec un polynôme d'ordre trois, on trouve la position de l'amplitude maximale de la troisième harmonique de chaque série de données. Ceci résulte du fait que la viscosité du milieu n'est pas prise en compte dans la simulation effectuée.

B.2 Un paramètre important : la viscosité
Les positions des maxima d'amplitude augmentent progressivement au cours de la propagation à mesure que l'amplitude de l'onde diminue. Nous constatons que la position des maxima augmente lorsque l'amplitude de l'onde de cisaillement diminue.

Cas général : l’onde de cisaillement non plane
Vitesse des particules de l'onde de cisaillement à différentes distances de la source en fonction du temps. Le profil d'onde est complètement différent de celui observé dans une onde plane.

Conclusion de ce chapitre
Nous développons ensuite une nouvelle méthode pour calculer l'élasticité mise en œuvre : le problème inverse. Une autre étude porte sur l'utilisation de la mesure de l'élasticité cutanée en collaboration avec L'Oréal.
Etude de l’élasticité du biceps durant la contraction musculaire
L'exploitation des résultats montre un résultat surprenant, une relation linéaire entre l'activité électrique musculaire et le module transversal d'élasticité. Enfin, nous présentons les résultats expérimentaux et discutons des relations observées entre l'élasticité et l'activité électrique du biceps.
A. Le protocole expérimental
Dans une deuxième partie, nous expliquons l'algorithme d'inversion que nous avons utilisé pour calculer le module de la section transversale du biceps.
A.1 Sujets et matériels
Cet appareil permet de contrôler le couple exercé par le complexe musculo-tendineux de l'avant-bras. Pour cette raison, il est difficile de contrôler seul la force de sortie du biceps.

A.2 Protocole
Lors de chaque exercice, le couple exercé par le sujet et l'activité électrique du biceps sont enregistrés en continu. On obtient ainsi trois paramètres immédiats permettant de décrire l'évolution du biceps lors de la contraction : Couple – EMG-RMS – Module d'élasticité.
A.3 Résultats bruts
4 : (a) Couple exercé par le complexe musculo-tendineux dans la partie antérieure du bras en fonction du temps. b) Activité électrique du biceps (cercle noir) et du triceps (carré rouge) en fonction du temps. A partir du champ de déplacements, le module d'élasticité de cisaillement transverse du biceps est calculé en résolvant le problème inverse.

B. Le problème inverse
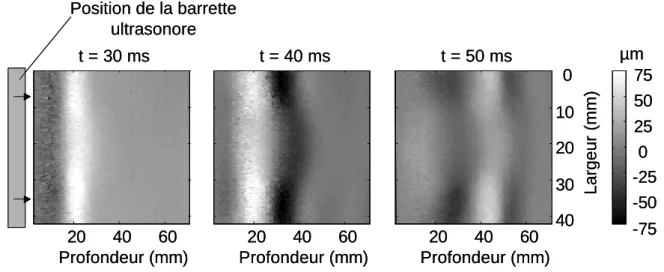
Le champ de déplacements de l'onde de cisaillement mesuré le long de l'axe des ultrasons est représenté en nuances de gris sur la figure (Fig. Ceci est obtenu en choisissant une plage de fréquence fixe autour de la fréquence centrale de l'onde de cisaillement.

C. Résultats expérimentaux
Le module de cisaillement est normalisé au module de repos et l'EMG-RMS à la valeur maximale. Dans la figure suivante, nous traçons la relation entre le module de cisaillement au repos et l'indice d'élasticité de chaque sujet (R = 0,80, P < 0,05).
D. Discussion
Cela signifie que plus la plage de variation de l'élasticité musculaire est grande, plus l'élasticité au repos est faible. Par exemple, une personne dont l'élasticité musculaire peut varier dans de grandes proportions a un muscle particulièrement mou au repos.
E. Conclusion
Application à la mesure d’élasticité de la peau
Ainsi, avec une approche phénoménologique du système, en collaboration avec L'Oréal, nous avons tenté de développer une nouvelle sonde ultrasonore pour la mesure locale et in vivo de l'élasticité cutanée. Dans la dernière partie, ce résultat est confirmé par une étude in vivo sur plusieurs personnes, où il est montré que la vitesse des ondes basse fréquence dépend également de la zone du corps investiguée.
A. Transposition du problème
12 : (a) Lobe de directivité de l'onde de cisaillement simulé à l'aide des fonctions de Green dans un milieu semi-infini isotrope à 12 mm d'une source ponctuelle. 12(b) est une coupe schématique des boucles de directivité des ondes de cisaillement produites par un anneau.

A.2. Un nouveau palpeur acoustique pour la peau
13 : (a, b) Champ de déplacement de l'onde de cisaillement dans le domaine de Fourier, dans le cas d'un piston et d'un anneau de même surface à la fréquence centrale. c) Augmentation du décibel entre le fonctionnement d'un segment de diamètre extérieur 18 mm et d'un piston de surface équivalente. De plus, sa concentration en gélatine (10%) permet une bonne transmission des ondes de cisaillement.
A.3 Les limites de l’élastographie impulsionnelle
Le mode monochromatique permet de mesurer avec précision le léger déphasage de l'onde de cisaillement en profondeur lors de sa propagation. De plus, notre système traite de la propagation des ondes de cisaillement dans un milieu à trois couches.
A.4 Validation de la sonoélastographie par simulation
16 champs de déplacements d'ondes de cisaillement à différents intervalles de temps pendant la propagation. Dans la deuxième zone équivalente de derme, nous surestimons à nouveau la mesure de la vitesse de l'onde de cisaillement.
B. Validation expérimentale du procédé
La vitesse des ondes basse fréquence mesurées n'est donc pas celle des ondes de cisaillement, mais varie proportionnellement à celles-ci.
B.1. Expérience sur des fantômes de peau
19 : Retard de phase de l'onde basse fréquence dans le fantôme de peau en fonction de la profondeur. 20 : Test de répétabilité pour estimer la vitesse des ondes basse fréquence en fonction du temps.

B.4. Comparaison entre différents fantômes
B.5. Expériences in vivo
La rupture de pente entre les deux zones que sont le derme et l'hypoderme est évidente. Cette nouvelle sonde cutanée permet donc d'obtenir une mesure locale d'un paramètre lié à l'élasticité dans le derme, mais aussi dans l'hypoderme.
C. Etude in vivo en collaboration avec l’Oréal
La contrainte parallèle à la surface cutanée augmente la raideur du derme, 52 m/s sur le bras tendu (peau relâchée) et 64 m/s sur le bras fléchi (peau tendue). Enfin, on observe dans chaque couche de la peau un coefficient de variation de la mesure assez important, 36% dans le derme et 41% dans l'hypoderme.
D. Conclusion
Le caractère local de la mesure dans les deux couches principales de la peau est frappant. En effet, une variation de l'élasticité de la peau en fonction de la zone du corps explorée et l'effet d'un biais sur la mesure a été observé et quantifié.
Annexes
- Mesure de déplacements par intercorrélation
- Expressions des fonctions de Green en milieu isotrope pour une source ponctuelle en mode impulsionnelle
- Expressions des fonctions de Green en milieu hexagonal pour une source ponctuelle en mode impulsionnelle
- Estimation de l’erreur sur la vitesse moyenne des ondes de cisaillement en sonoélastographie
- Inversion des équations de la vitesse et de l’atténuation du modèle de Voigt
Les deux inconnues sont µ1 et µ2 en fonction de la vitesse et de l'atténuation de l'onde de cisaillement. Les équations A.44 et A.46 donnent donc les coefficients de Lamé µ1 et µ2 en fonction de la vitesse et de l'atténuation de l'onde de cisaillement, qui peuvent être calculés expérimentalement.