Le but de cette thèse est d'étudier l'application des techniques de traitement d'antenne au problème de localisation de source en champ proche. La thèse contribue à la recherche dans le domaine de la localisation des sources en champ proche.
Introduction
Champ proche
Rayonnement électromagnétique
Les distributions de charge et de courant de la source obéissent à la loi de conservation. Cette fonction décrit l'amplitude et la phase du champ électrique à la position créée par une source ponctuelle à la position.

Définition
Applications
Télécommunications mobiles
D'un point de vue général, le problème de localisation de la source devient plus complexe en situation de champ proche. Les enjeux de la localisation des sources dans le domaine des télécommunications relèvent principalement de deux aspects.
Radio-identification
La situation de champ proche est prise en compte lorsque l'hélicoptère est proche de la zone accidentée. CONCLUSION 15 Un autre problème de localisation des sources RFID réside en fait.

Conclusion
Ce chapitre présente les méthodes classiques de localisation de source à l'aide d'un réseau de capteurs. Leur principe peut être utilisé pour la localisation de sources en champ proche après des ajustements appropriés.
Modèle des observations
- Hypothèses de travail
- Modèle général
- Modèle de champ lointain
- Matrice de covariance
Pour minimiser l'influence du bruit, la plupart des méthodes de traitement du signal à haute résolution sont formulées à partir de la matrice de covariance des signaux reçus [40]. FAR FIELD METHODS 23 En pratique, la matrice de covariance est estimée à partir d'échantillons temporels.
Méthodes de champ lointain
- Méthodes conventionnelles
- Formation de voies
- Améliorations de la formation de voies
- Méthodes paramétriques
- Prédiction linéaire
- Maximum de vraisemblance
- Méthodes à sous-espaces
- MUSIC (MUtiple SIgnal Classification)
- Root-MUSIC
- ESPRIT (Estimation of Signal Parameters via Ro-
- Conclusion
L'algorithme MUSIC exploite les propriétés de décomposition en éléments propres de la matrice de covariance du vecteur d'observations. La décomposition en éléments propres de la matrice de covariance du vecteur d'observations s'écrit sous la forme suivante.
Méthodes de champ proche
Extension des méthodes conventionnelles
Extension des méthodes du maximum de vraisemblance
Extension de la méthode MUSIC
De même, la puissance à la sortie de la formation de canal MVDR bidimensionnelle est écrite dans le formulaire. La transformation proposée dans l'équation (2.54) permet de séparer les deux paramètres source : direction et distance. Puis les distances des sources sont calculées avec ces estimations des directions d'arrivée des sources selon la méthode de MUSIC-2D décrite par l'équation (2.50).
Conclusion
Lorsque les sources sont situées dans le champ proche, la localisation de la source est plus compliquée en raison de la distorsion du front d'onde. Dans le chapitre précédent, nous avons montré que les techniques ESPRIT et root-MUSIC sont les plus efficaces pour la localisation des sources. Dans la troisième partie, les méthodes SPIRIT symétriques sont présentées ; – La quatrième partie conclut ce chapitre.
Généralités
Modèle approché
L'avantage de cette approximation réside principalement dans le fait que le paramètre reste partiellement séparé du paramètre θ. Ce développement permet de mettre en évidence les propriétés qui sont exploitées dans la suite du chapitre.
Réseau de configuration symétrique
Premièrement, le premier terme de la phase des éléments de a(r, θ) est identique à celui du modèle champ lointain. Cette double propriété permet de développer des méthodes rapides de localisation des ressources.
Techniques cumulant-ESPRIT
Définition
Estimation des paramètres
En décomposant matrixCA en ses éléments propres, on peut obtenir une matrice de vecteurs propres dans le sous-espace signalUs. Us1 : une matrice de dimension (M, K) comprenant les M premières lignes (lignes 1 à M) de la matrice Us;. Il est facile de montrer que la matrice Φˆ (ou Ω) a les mêmes valeurs propres que la matrice Φ (ou Ω).

Techniques symétrique-ESPRIT
- Analyse du modèle
- Estimation des directions d’arrivée
- Symétrique-ESPRIT spectrale [76]
- Symétrique-ESPRIT polynomiale [28]
- Symétrique-ESPRIT de degré réduit
- Estimation des distances
- Résultats de simulation
- Probabilité d’échec
- Précision
Pour ce faire, nous pouvons exploiter la propriété de rang réduit de la matrice de transfert. La version polynomiale de la méthode ESPRIT symétrique présente plusieurs avantages par rapport à sa version spectrale. Notons que cette partition de la matrice Us s'effectue de la même manière.
Conclusion
Ces erreurs proviennent principalement de la troncature dans le développement limité du déphasage utilisé dans l'approximation du modèle. Le biais provient principalement de la troncature à développement limité, qui dégrade les performances de ces techniques. Ce chapitre présente l'utilisation de la technique de focalisation pour la localisation de sources en champ proche.
Sources en champ proche
Analyse du modèle
D'un point de vue électromagnétique, la fonction g(r, θ, m) peut représenter la distorsion du front d'onde d'une source dans le champ lointain venant de la direction θ. L'explication de ce phénomène réside dans le fait que la distorsion devient faible lorsque la source s'éloigne du réseau. Cette propriété est très intéressante car elle permet d'estimer la distorsion g(r, θ, m) à partir d'une observation approchée.
Cas 1 : sources groupées
De manière similaire, l'application de focalisation à la matrice de covariance (décrite par l'équation (2.11)) permet de retrouver la structure en champ lointain de la matrice de covariance focalisée, qui s'écrit sous la forme Mn =UnUHn =BHU0nU0Hn B : matrice projecteur de dimension (M, M) ; – Un : matrice des vecteurs propres de la matrice de covariance R en sous-. U0n : matrice des vecteurs propres de la matrice de covariance focalisée Ry dans le sous-espace de bruit.
Cas 2 : sources non-groupées
L'imprécision de l'évaluation avec la technique de focalisation provient principalement de l'erreur due à l'approximation de la distorsion dans le modèle. On peut alors écrire la matrice de focalisation de zone q sous la forme : Bq = diag. De la même manière que dans la méthode ESPRIT, les éléments diagonaux de la matrice Φ sont estimés à partir de la décomposition en éléments propres de la matrice de covariance.
Sources à large bande
Modèle dans le domaine fréquentiel
SOURCES LARGE BANDE 75 On peut donc estimer les DOA des sources Pq dans la zone q par. A noter que la matrice de transfert A(f) dans le domaine fréquentiel a la même structure que celle dans le domaine temporel pour les signaux à bande étroite. Nous pouvons utiliser les techniques de localisation des sources présentées précédemment pour estimer les positions des sources.
Compensation conjointe
Nous pouvons utiliser les techniques de localisation des sources présentées précédemment pour estimer les positions des sources. 4.32) avec (re, θe) une estimation a priori de la position des sources. Notons que les vecteurs propres de la matrice ΓF dans le sous-espace du signal génèrent le même espace généré par les colonnes de A(f0). En pratique, la fréquence centrale de la bande du signal est privilégiée, ce qui minimise l'influence de ces erreurs.
Résultats de simulation
Cas 1 : sources groupées
- Probabilité d’échec
- Précision
- Discussion
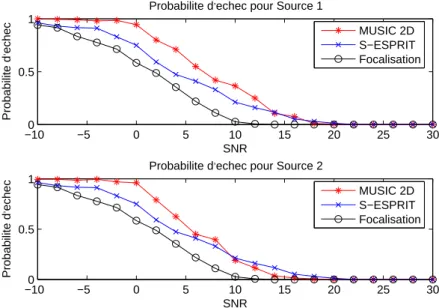
Fig.4.5 – Comparaison des méthodes en termes de probabilité de défaillance : MUSIC-2D, symétrique-ESPRIT et méthodes de focalisation. On constate que l'estimateur basé sur la technique de focalisation présente une meilleure performance que la technique symétrique-SPIRIT. 4.7 – Comparaison en termes de RMSE (versus le nombre d'images) : méthodes de mise au point et symétrique-ESPRIT.
Cas 2 : sources non-groupées
La bonne performance de la méthode de focalisation est montrée dans les simulations précédentes. Ces résultats montrent le potentiel de la technique de focalisation pour le cas de sources localisées dans plusieurs zones distinctes. 4.9 – Performance de la technique de focalisation pour les sources large bande : RMSE de l'estimation DOA.
Cas 3 : sources à large bande
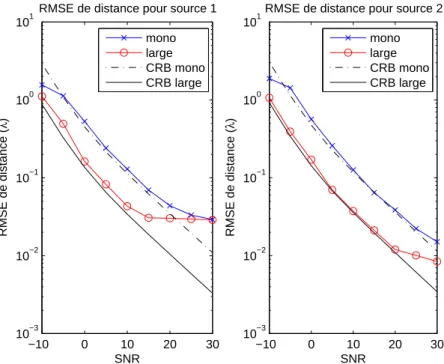
4.10 - Performance de la technique de focalisation pour les sources large bande : RMSE des estimations de distance. La technique de focalisation montre de bonnes performances dans le cas des sources large bande, indiquant l'application possible de cette technique aux sources large bande. Cependant, les RMSE associées à l'estimateur monofréquence sont plus élevées (0,3◦ et 0,2◦ pour DOA et 0,02λ0 et 0,02λ0 pour les distances).
Conclusion
Dans une première partie, les imperfections du réseau de capteurs sont étudiées depuis leur origine d'un point de vue physique. Le modèle étendu d'observations est présenté en tenant compte des influences des imperfections dans la deuxième partie. L'intégration des données de calibration dans la localisation est présentée dans la quatrième partie avec des simulations.
Imperfections dans un système de localisation
Erreurs globales
- Désynchronisation
- Couplage mutuel
Par exemple, la charge d'un condensateur produit une temporisation qui dépend de sa capacité et de la résistance du circuit. Cependant, dans la localisation des sources, le couplage mutuel des capteurs peut assurer une transmission d'énergie entre les capteurs, ce qui conduit à des difficultés dans la détermination des déphasages. L'influence du couplage mutuel dans un réseau d'antennes réside dans la production d'un bruit additif et cohérent du signal utile [66].

Erreurs locales
- Amplitude du signal
- Propagation par trajets multiples [43]
- Incertitude des positions des capteurs
Fig.5.4 - Imperfections dans un réseau de capteurs : propagation sur plusieurs trajets et incertitude des positions des capteurs. Sachant que le retard est fonction de la distance de propagation, cette erreur dépend aussi des positions des sources. Deuxièmement, des informations de position de capteur inexactes peuvent se produire pendant la fabrication.
Conclusion
Modèle des observations dans un contexte réel
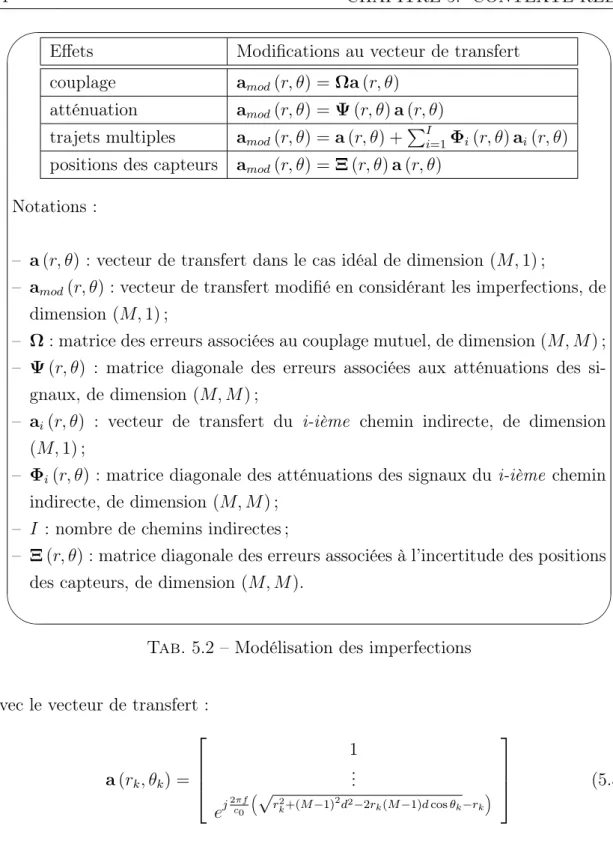
Ω : matrice des erreurs d'interconnexion, dimensions (M, M) ; – Ψ(r, θ) : matrice d'erreur diagonale associée aux si-atténuations. Dans un contexte réel, les observations ne satisfont plus le modèle général décrit par les équations (5.2) et (5.3). À partir des analyses présentées dans la section précédente et des études bibliographiques, nous présentons des modèles des effets de l'imperfection dans le tableau (5.2).
Techniques de calibration
Calibration globale
Les techniques de calage global utilisent une transformation qui permet de décrire la relation entre le vecteur de transfert dans un contexte réel amod(r, θ) et celui dans le contexte idéal a(r, θ). Pour minimiser les erreurs causées par la matrice G dans la localisation de la source, la matrice G doit être estimée avant que les techniques de localisation de la source ne soient exécutées. Pour résoudre l'optimisation (5.10), le nombre de mesures Lm doit être supérieur au nombre de capteurs M. La solution de cette optimisation s'écrit sous la forme suivante :. 5.11) L'estimation de la matrice de correction Gˆ permet donc d'associer idéalement le vecteur de transfert à celui du cas réel.
Calibration locale
5.11) L'évaluation de la matrice de correction Gˆ permet de relier le vecteur de transfert dans le cas idéal à celui du cas réel. Cependant, cette influence dépend des positions des sources du fait de la présence de failles locales. Ensuite, le vecteur de transfert modifié aˆmod(r, θ) est calculé à partir de la relation (5.13) pour chaque position de cette zone.
Technique d’interpolation
Analyse du modèle
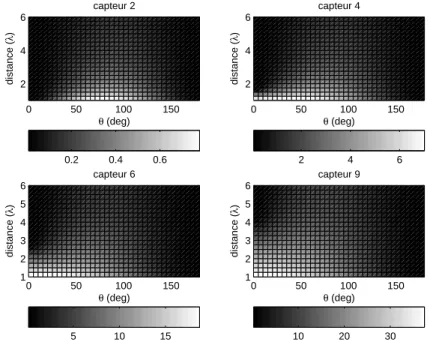
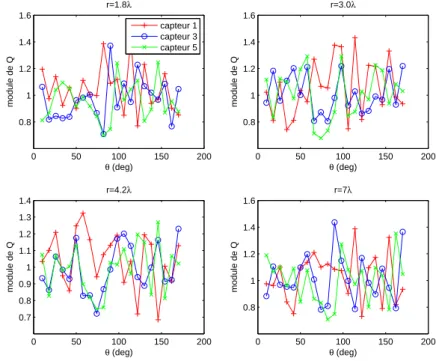
Dans ce paragraphe, nous présentons une analyse de la variation des éléments de cette matrice en fonction de ses paramètres dans un environnement réel. Dans la figure (5.5), on montre la variation du module des éléments diagonaux de la matrice Q(r, θ). En pratique, la matrice Q(r, θ) a une variation douce par rapport à la position (r, θ), grâce à la continuité et à la différenciation de la fonction de Green.
Interpolation
Cette propriété permet d'estimer cette matrice pour toutes les positions de cette zone de recherche à partir d'un processus d'interpolation. De plus, l'erreur d'interpolation dans ce processus est faible en raison de la faible variation de Q(r, θ). Estimer les matrices de correction Q(r, θ) par rapport aux positions calibrées à l'étape 1 (utiliser les équations (5.13) et (5.3)).
Résultats de simulation
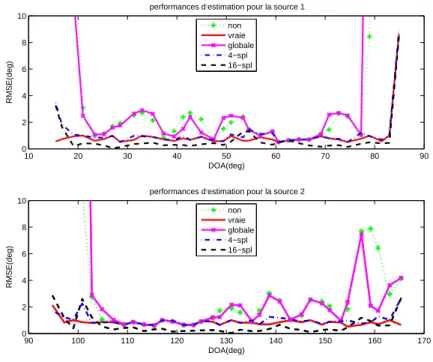
Performances en fonction des positions de sources
Dans cette simulation, nous comparons les résultats obtenus selon 5 techniques de calibration listées ci-dessous. En effet, les deux types d'étalonnage ont la même densité (81 points). D'après les résultats de cette simulation, nous pouvons conclure que l'approche de calage local par interpolation présente de bonnes performances.
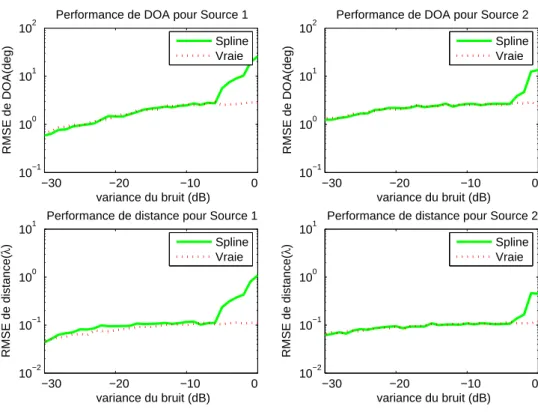
Performances en fonction du bruit de calibration
Pour comparer ces résultats de manière plus quantitative, nous présentons dans le tableau (5.3) les erreurs moyennes pour les différents secteurs des fonctions. Les estimations des données sans calage et celles obtenues par calage global sont largement biaisées. 5.10 – Performances en fonction de la puissance sonore de calibrage vise à représenter les performances des techniques de calibrage en fonction de la variance du son de calibrage.
Conclusion
Cependant, certaines situations peuvent nécessiter l'examen de l'hypothèse de sources passives (réflecteurs). Une partie importante de ce projet était d'étudier les techniques de localisation des contraintes [75] où l'hypothèse des sources passives est considérée. La localisation de sources passives est souvent mise en œuvre en exploitant les propriétés des ondes réfléchies par les sources.
Technique du retournement temporel
Principe
TECHNIQUE D'INVERSION TEMPORELLE 111 L'inversion temporelle est basée sur la propriété d'invariance de la solution de l'équation de propagation d'onde avec inversion temporelle. Idéalement, l'utilisation de la technique de retournement temporel se décompose en deux étapes. En utilisant l'inversion temporelle des signaux reçus, un réseau de récepteurs transmet ensuite les signaux inversés dans le temps.
Application à la localisation de sources passives
En principe, la projection sur l'opérateur de retournement temporel est équivalente à la technique de formation de canal. De même, nous pouvons utiliser d'autres projecteurs pour la localisation de la source, tels que ceux basés sur le sous-espace (MUSIC), etc. Cet exemple montre la faisabilité de la technique variable dans le temps pour trouver des sources passives.
Techniques basées sur le système MIMO
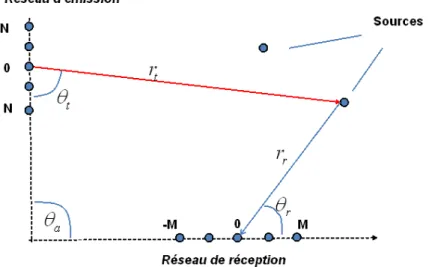
Modèle des observations
La distance entre les capteurs du réseau est d pour les deux réseaux K sources passives sont considérées dans la zone d'observation. Cependant, la matrice (6.14) est indépendante du vecteur de transfert d'arrivée, tandis que la matrice (6.15) est indépendante du vecteur de départ. Cette séparation des vecteurs de transfert (départ et arrivée) permet d'estimer les positions des sources à partir d'une des deux matrices de covariance.
Estimation des paramètres
À partir des équations (6.7) et (6.12), nous définissons ensuite les matrices de covariance comme suit. TECHNIQUES BASÉES SUR MIMO 117 réseau de départ (distances et directions de départ). Par conséquent, les estimations des paramètres d'arrivée et celles des paramètres de départ ont des performances différentes.
Résultats de simulation
Cette utilisation améliore les performances d'estimation grâce à une meilleure estimation de la matrice de covariance. Cette thèse a apporté un certain nombre de contributions à la recherche dans le domaine de la localisation de sources en champ proche. La matrice de focalisation, qui sert à compenser la sphéricité du front d'onde, dépend en grande partie de la connaissance estimée des positions des sources (obtenue au moyen d'une pré-estimation).
Rayonnement électromagnétique d’une source ponctuelle
Champ proche et champ lointain
Front d’onde du signal provenant d’une source en champ lointain
Front d’onde du signal provenant d’une source en champ proche
Traitement d’antennes en télécommunications : estimation des posi-
Géolocalisation en utilisant la technologie de radio-identification
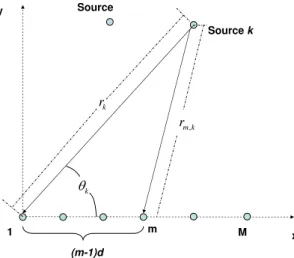
Réseau de M capteurs
Déphasage inter-capteurs dans le contexte de champ lointain
Méthode de formation de voies
ESPRIT : Partition du réseau
Comparaison des méthodes de champ proche
Cumulant-ESPRIT : 5 itérations
Probabilités d’échec en fonction du SNR
Probabilités d’échec en fonction du nombre de snapshots
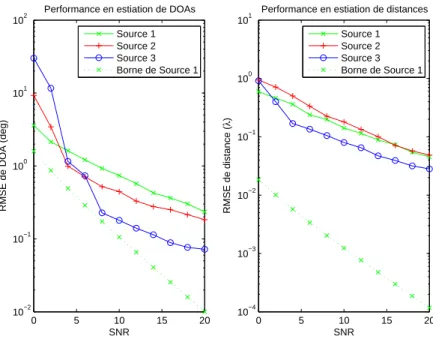
RMSE de l’estimation des DOAs en fonction du SNR
RMSE de l’estimation des distances en fonction du SNR
RMSE de l’estimation des DOAs en fonction du nombre de snapshots 61
Distorsion du front d’onde en champ proche versus distance pour
Distorsion du front d’onde en champ proche versus direction pour
Répartition des sources pour l’application de focalisation
Comparaison en termes de RMSE (versus SNR) : les méthodes de
Comparaison en termes de RMSE (versus nombre de snapshots) : les
Performances de la technique de focalisation pour les sources non-
Performances de la technique de focalisation pour les sources à large
Performances de la technique de focalisation pour les sources à large
Transmission du signal dans un système de localisation
Couplage mutuel dans un réseau de capteurs
Atténuation due au canal de propagation
Imperfections dans un réseau de capteurs : propagation par trajets
Interpolation des données de mesure
Performances en fonction de la position des sources
Performances en fonction de la puissance du bruit de calibration
Principe du retournement temporel
Localisation de sources passives par la projection de l’opérateur du
Réseau MIMO pour la localisation de sources passives
Performances d’estimation pour le système MIMO
Comparaison des méthodes de champ lointain
Méthodes exploitant les propriétés d’un réseau symétrique
Imperfections d’un réseau de capteurs dans un contexte réel
Modélisation des imperfections
Comparaison en termes de RMSE