Les prédictions du modèle adapté lors de la rotation de l'électrobroche sont soumises à une validation expérimentale. Il est possible de déterminer les conditions optimales d'utilisation de l'ensemble « broche - outil », qui assurent, d'une part, la productivité et la stabilité de la coupe, et, d'autre part, le comportement de l'équipement lors de l'entretien.
ETAT DE L’ART
Domaines d’applications
Les principaux domaines d'application de l'UGV sont l'aéronautique avec l'usinage de pièces de structure et de pièces de moteurs d'avions (ventilateurs, ventilateurs, pales...), l'industrie du moulage pour l'usinage de formes complexes à partir de matériaux à haute résistance mécanique, et l'automobile. l’industrie sur les pièces de forge ou de fonderie (Figure 1-1). Les broches sont principalement sollicitées par des opérations d'usinage longues pouvant atteindre plusieurs heures avec des fréquences de rotation élevées.
La problématique industrielle
Nous citerons ici l'exemple de la machine METEOR 5 ou METEOR ML qui produit des culasses moteurs à La Française de Mécanique. La société PCI-SCEMM et plus généralement les professionnels de la machine-outil ont donc exprimé le besoin de réduire significativement les coûts d'exploitation des électrobroches à grande vitesse.
Principes
Ce sont les électrobroches à roulements magnétiques qui équipèrent les premières voitures à grande vitesse, qui viendront bientôt concurrencer les électrobroches à roulements à billes en céramique. Dans l’état actuel des choses, les électrobroches à roulement à billes détiennent la majorité du marché.

Fonctions et composants associés
Cependant, la résistance à la fatigue des céramiques est bien supérieure à celle de l’acier. Le changement d'outil s'effectue grâce au vérin hydraulique "pot de serrage" fixé à l'arrière de la broche.

Introduction
Une analyse critique de ces travaux est ensuite réalisée pour mettre en évidence les intérêts et les lacunes des approches proposées.
Approches de modélisation existantes
- Modélisation dynamique des broches par éléments finis
- Modélisation par identification expérimentale
Ils représentent les effets de la précharge induite thermiquement sur le comportement dynamique d'un arbre. L'influence du comportement du roulement sur la raideur dynamique de l'arbre en fonction de sa vitesse de rotation est analysée.
Synthèse
Par ailleurs, les conditions de stabilité des opérations d'usinage doivent être affinées, et des gains en termes de productivité et de qualité des opérations d'usinage sont également envisagés. Le domaine d'étude se limite aux phénomènes vibratoires liés à la dynamique de l'ensemble broche-outil et à ses interactions avec une pièce infiniment rigide.
DEMARCHE D’ELABORATION D’UN MODELE GLOBAL
Entités structurales d’une broche
Le rotor est commandé en rotation via un roulement avant et un roulement arrière constitués respectivement de trois et deux roulements hybrides. Le roulement arrière est relié au corps de broche via une douille à billes.
Démarche de modélisation
- Modélisation par éléments finis
- Identification du comportement dynamique
- Recalage de modèle
Le développement du modèle dynamique du pivot jusqu’à l’arrêt se fait selon une approche « étape par étape ». Le but de cette partie est de développer des modèles éléments finis des entités structurelles de la broche.
Modèle éléments finis de l’entité rotor
Les travaux et résultats liés à la modélisation des autres entités structurelles de la broche sont présentés en annexe 3. La zone 2 représente l'assemblage des tubes représentatifs de la section rotor, de l'axe de broche et de la section liée à l'outil de serrage.
Identification modale de l’entité rotor
Par exemple, la zone 1 représente la composition d'un tube d'arbre en acier représentatif et d'un tube de mandrin d'outil représentatif. Les critères de corrélation carrée et logarithmique des FRF identifiés et expérimentaux [Balmes & Leclere 03] en sortie de boucle d'optimisation sont inférieurs à 10-15 et 0,07, respectivement, pour tous les modes identifiés (Figure 2-11).

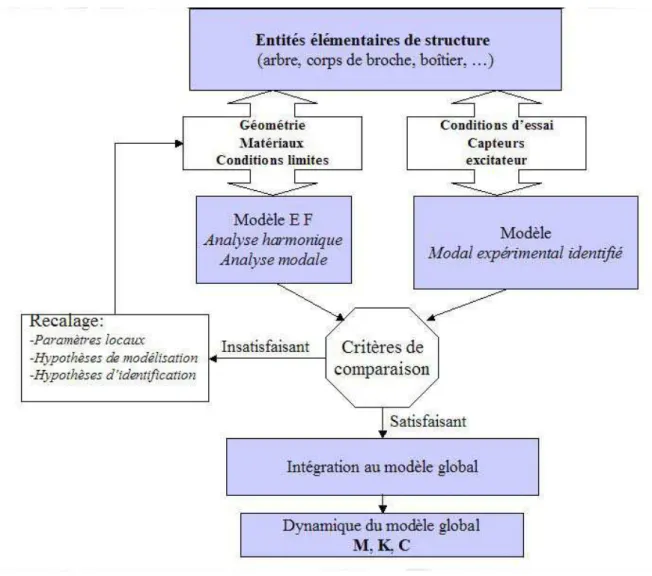
Intégration essais / éléments finis et recalage du modèle
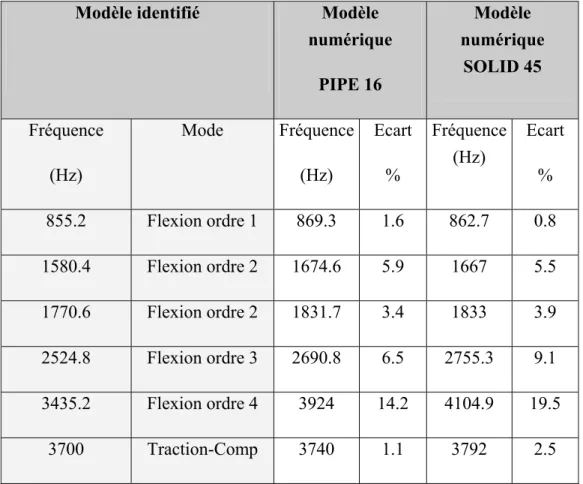
Ils constituent donc les paramètres privilégiés à définir lors de la procédure d'enregistrement du modèle. La figure 2-12 ci-contre représente les résultats comparant les modes de flexion du modèle PIPE 16 avec ceux du modèle identifié.
Synthèse
Ce résultat indique la bonne représentativité du modèle éléments finis poutre pour modéliser le comportement dynamique réel de l’entité rotor. Le critère MAC (Figure 2-13) est utilisé pour comparer la base modale expérimentale avec celle du modèle éléments finis.
Modèle éléments finis de la broche
Cette partie présente l'application de l'approche du fuseau complet adoptée pour la modélisation, l'identification et le réajustement du modèle comportemental. Une description de l'assemblage du modèle d'unité de rotor avec roulements est présentée dans la Figure 2-14.
Caractérisation expérimentale de la broche à l’arrêt
Avant que le modèle d’essieu puisse être utilisé en simulation, il est nécessaire de vérifier la bonne représentation du modèle dans des cas de charges simples et représentatifs. Pour ce faire, les résultats de simulation du modèle dynamique global du puits doivent être comparés aux résultats d'une caractérisation expérimentale.
Recalage du modèle éléments finis
- Propriétés dynamiques d’une broche non tournante
- Procédure de recalage
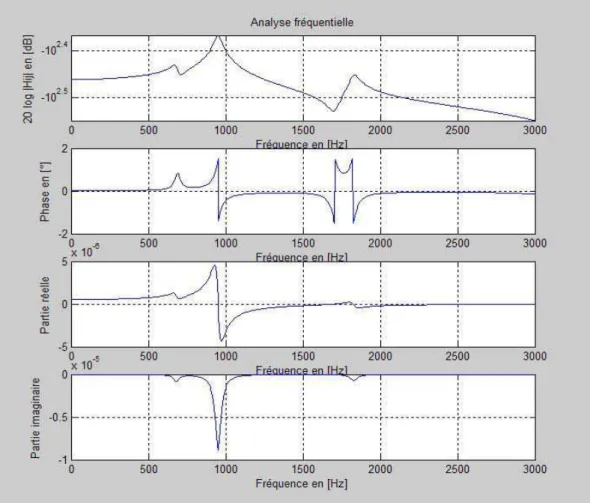
L'analyse harmonique (Figure 2-17) permet le suivi des termes de la matrice de transfert dérivés d'un modèle analytique ajusté en fonction de la fréquence. Nous pouvons donc voir que nous pouvons cibler des FRF proches de la réalité et ainsi nous rapprocher de l'amortissement réel de la broche.
Synthèse
Le processus de développement du modèle dynamique global d’une broche UGV a été présenté dans ce chapitre. Une procédure de réinitialisation du modèle éléments finis est mise en œuvre pour faire correspondre ses propriétés modales avec celles du modèle identifié.
MODELISATION DYNAMIQUE D’UNE ELECTROBROCHE UGV
Approche retenue
Le mouvement d'un corps flexible, aux petites déformations, est considéré comme une superposition d'un déplacement non linéaire d'un corps rigide et de déformations élastiques linéaires. Dans cette formulation, deux ensembles de coordonnées sont utilisés pour décrire la configuration du corps.
Formulation cinématique d’une section
Toutes les translation et rotations de section sont regroupées dans une matrice colonne de déplacements généralisés xq=[xrGT xθT]T. Enfin, on peut regrouper ces différentes expressions dans une matrice de vitesses généralisées pour une section.
Définition d’un élément fini « poutre-rotor »
- Energie cinétique
- Energie élastique
- Application à l’entité tournante de la broche
Les déplacements au sein d'un élément sont décrits par une interpolation de déplacements nodaux à l'aide de fonctions de forme appropriées. On remarque que la matrice de masse d'un élément n'est pas une matrice constante du fait de la contribution de

Modélisation des paliers à roulement
- Etude bibliographique
- Définition d’un élément « roulement »
D'autres études caractérisent analytiquement et expérimentalement le comportement dynamique des roulements à travers le comportement de la broche. Cette équation est établie pour chaque élément roulant autour d'une position de déplacement moyen due à la précharge initiale dans le roulement.
Modélisation de l’amortissement
- Généralités
- Techniques de modélisation
Si D est la matrice d'amortissement visqueux équivalente dans l'espace nodal, Φ est la matrice des vecteurs propres du système non amorti, mi la masse modale du mode i de pulsation ωi. En réalité, les vecteurs propres du système non amorti ne diagonalisent pas la matrice d'amortissement.
Equation différentielle du mouvement
Un panel d'outils d'analyse numérique est développé sous Matlab® pour simuler le modèle de broche dans des conditions de contraintes représentatives de la réalité. L'outil privilégié pour représenter l'évolution du comportement dynamique de la broche en fonction de sa vitesse de rotation est le diagramme de Campbell [Lalanne & Ferraris 01].
Analyse harmonique du modèle
Une étude de la réponse harmonique en fonction de la vitesse de rotation est réalisée pour évaluer l'influence de la vitesse de rotation sur le comportement dynamique de la broche. En fixant q( )t =Qejωt, l'équation différentielle devient :. 3.27) La matrice des fonctions de transfert de la broche est définie par.
Diagramme de Campbell
Cette évolution en fréquence des modes est présentée en fonction de la vitesse de rotation de l'arbre. Marquer sur la Figure 3-8 les cinq points d'intersection entre la droite représentative de l'excitation synchrone et les courbes représentatives de l'évolution des modes de flexion en fonction de la vitesse de l'arbre.
Réponse à une excitation synchrone
L'analyse des courbes obtenues sur la figure 3-10 fournit des indications importantes liées aux contraintes sur les roulements en fonction de la vitesse de rotation de la broche. Ces contraintes vibratoires sont des mécanismes de fatigue des composants et se traduisent directement par une réduction de la durée de vie des roulements.
Réponse au balourd
En particulier, nous montrons que le comportement évolue significativement avec la vitesse de rotation de la broche. Enfin, les propriétés dynamiques mises en évidence par le modèle numérique du fuseau tournant ont été validées expérimentalement.
STABILITE DE LA COUPE EN USINAGE
Régénération de la surface
Si le déphasage entre l'ondulation superficielle et la trajectoire de l'outil est quasiment nul, le changement d'épaisseur des copeaux est relativement insensible à ces effets dynamiques et l'amplitude des vibrations diminue progressivement pour tendre vers zéro. A l'inverse, si le déphasage est prononcé et si l'amortissement ou la raideur de la structure est insuffisant, des modifications de la section du copeau vont exciter la structure et les vibrations vont se développer significativement jusqu'à stabilisation à un seuil. là où la coupe est interrompue, l'amplitude et la période de la vibration sont telles que l'outil se trouve dans une (ou plusieurs) parties du tour en dehors de la matière.
Phénomène de couplage des modes
Talonnage
Problématique de la modélisation du système broche – outil – pièce pour la stabilité
- Approche par identification du comportement
- Approche par modélisation du comportement
- Synthèse
La figure 4-5b montre un diagramme des lobes de stabilité calculé à partir des propriétés effectives de la broche à la vitesse de rotation considérée. Les variations du comportement dynamique de la broche en fonction de sa vitesse de rotation apparaissent faibles et ont peu d'influence sur les lobes de stabilité.

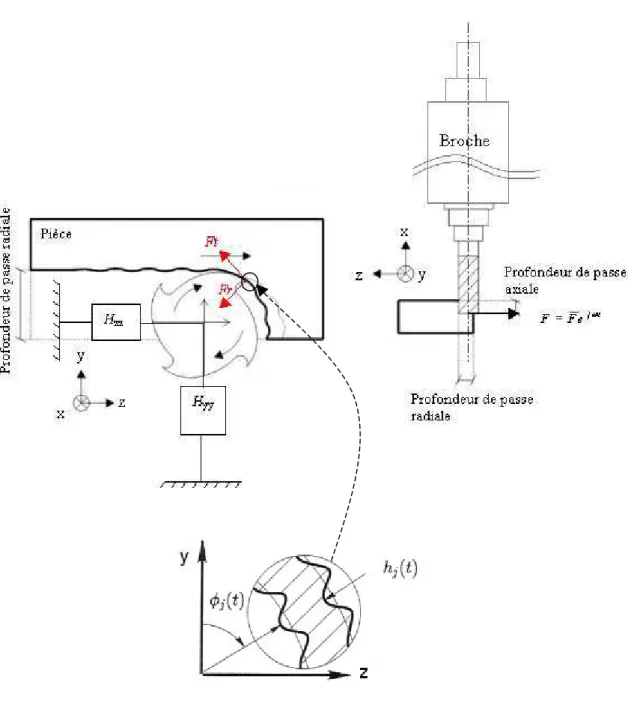
Modèles d’efforts de coupe en fraisage
L'amélioration des prévisions de stabilité d'une opération basée sur un examen attentif du comportement dynamique de la broche rotative peut être réalisée de deux manières différentes. La connaissance et le contrôle de la formation des copeaux et des aspects thermodynamiques associés à la découpe ne sont pas nécessaires.
Etude du broutement en fraisage par les approches analytiques et semi-analytiques
Ils sont représentatifs de l'orientation des efforts de coupe sur chaque dent, en fonction de sa position angulaire, et des coefficients de coupe spécifiques. Les lobes de stabilité sont tracés en fonction de la vitesse de rotation et de l'engagement axial.
Intégration du comportement dynamique de broche
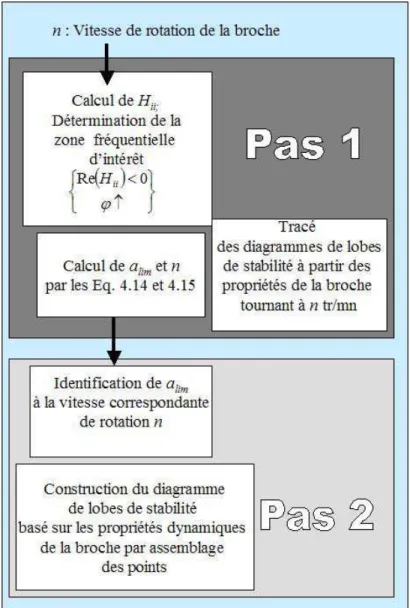
Les caractéristiques modales sont saisies dans ce logiciel pour calculer les lobes de stabilité. La zone de pulsation ω nécessaire au calcul des lobes de stabilité est limitée par un Rii( )ω négatif et une variation monotone de la phase ϕ.

Lobes de stabilité dynamiques
La position en vitesse des pics de stabilité résulte des propriétés modales de l'électrobroche en fonction de sa vitesse de rotation. La valeur de alim tend pour les deux approches vers la valeur minimale prédite par les lobes de stabilité statique.
Validation expérimentale
Les différences observées sont probablement dues aux écarts observés à la fin de la procédure de recalibrage du modèle d’éléments finis. Ce glissement résulte en grande partie d’erreurs résiduelles à la fin de la procédure d’enregistrement numérique des dessins ou modèles.

APPLICATIONS INDUSTRIELLES
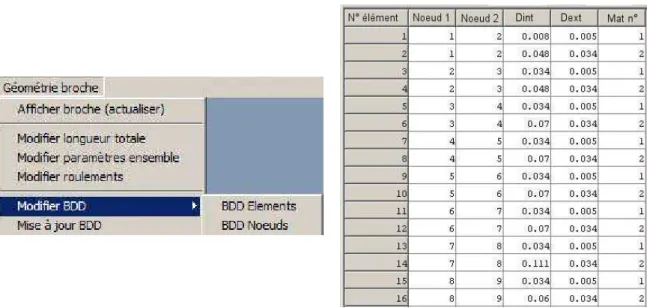
Module de conception de broche
Il est également possible de modifier directement la base de données (Figure 5-3) en spécifiant les positions des nœuds ou la taille des éléments. Après avoir spécifié les paramètres du modèle, la base de données des broches est mise à jour.
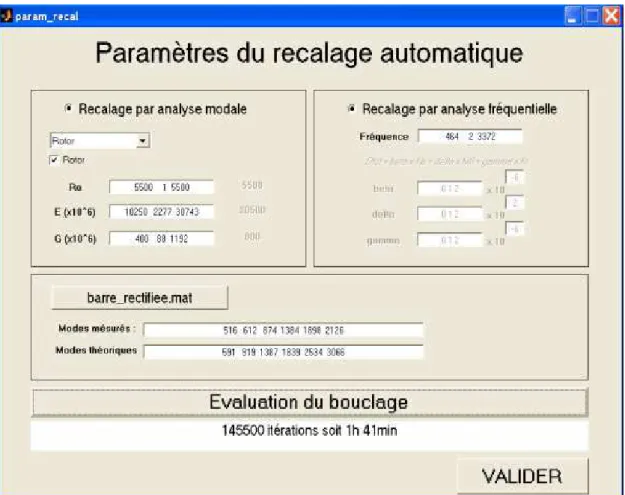
Module de recalage du modèle
Le principe est de faire converger les fréquences modales du modèle vers les fréquences modales issues de la procédure d'identification. L’objectif ici est que les facteurs d’amortissement modaux du modèle convergent vers ceux déterminés après la procédure d’identification expérimentale.
Processeur du logiciel
La première application présente une étude comparative des broches de différents fabricants en fonction de leurs fentes de stabilité. Cette approche permet de sélectionner pour un procédé d'usinage donné la broche qui présentera les meilleures performances en termes de stabilité.
Etude comparative de broche
Cette comparaison des limites de stabilité permet de sélectionner la broche la plus adaptée pour réaliser l'opération considérée. Pour les opérations nécessitant des fréquences de rotation de 11 000 et 12 500 tr/min, le choix se porte donc sur la broche (iii).

Etude d’optimisation
Le diagramme des lobes de stabilité associé à la broche (a) se trouve en dessous du point représentatif de l'opération considérée. Les pics de stabilité du « fuseau (b) » sont plus importants, mais ils n'incluent pas le point représentatif du fonctionnement considéré.

Conditions d’utilisation pour la tenue en service du couple broche-outil
La broche de recherche considérée est une broche Fischer équipée d'une fraise à 5 dents de diamètre 50 mm (Figure 5-13). Les conditions de rotation de la broche qui sollicitent le moins les roulements se situent dans les zones autour de 7 000 tr/min, 11 500 tr/min et 15 000 tr/min.
Conditions d’utilisation pour l’optimisation de la coupe
Zone d’intérêt
Merrit, Teorija samovzburjenega klepetanja strojnega orodja, Transactions of ASME Journal of Engineering for Industry. McVaugh, The Dynamics of rotor-bearing systems using finite element, Journal of engineering for industrial, Transactions of the ASME.
En pratique, la colonne H peut être déterminée en imposant une impulsion sur un seul ddl de la structure et en mesurant la réponse sur tous les ddl. En revanche, la ligne H peut être déterminée en mesurant la réponse qui suit un pas de profondeur de structure lorsque des impulsions sont appliquées à tous les ddl.
Les modèles d'identification diffèrent selon les hypothèses sous-jacentes (caractère linéaire ou non linéaire du comportement, nature de l'amortissement structurel, etc.) et les différences de conception. Après avoir mis en place un modèle expérimental, on souhaite souvent quantifier son degré de corrélation avec un autre modèle (éléments finis ou résultat d'une identification expérimentale par une autre méthode).
Cependant, les hypothèses d'utilisation de l'élément PIPE 16 sont mal adaptées à la modélisation par éléments finis du corps de broche. En fait, les fréquences propres des trois premiers modes de flexion sont ajustées de manière satisfaisante (différence inférieure à 6%).

Gs représente le module de cisaillement, v le coefficient de Poisson, comme la section transversale de l'arbre, et µ le rapport entre le rayon extérieur et intérieur de l'arbre. La matrice de rigidité d'un élément de poutre est obtenue à partir du calcul de l'énergie de déformation de la poutre en flexion, traction-compression et torsion.

![Figure 1-13 : Bloc-diagramme du modèle de précharge. Source [Spiewak & Nickel 00]](https://thumb-eu.123doks.com/thumbv2/1bibliocom/462800.68731/40.892.185.752.684.1009/figure-bloc-diagramme-modèle-précharge-source-spiewak-nickel.webp)