Enfin, une grande partie des développements réalisés dans HEREZH ont été mis en place dans le cadre de la thèse de N. Développements numériques [Rio et al. (1995b)] qui ont permis d'analyser la validité de la loi comportementale appliquée de l'élastohystérésis. différents types de matériaux sont présentés au chapitre 2.
Introduction
Cin´ ematique g´ en´ erale 3D
- Description cin´ ematique
- Rep` ere mat´ eriel entraˆın´ e
- Tenseur m´ etrique
- Tenseur des d´ eformations d’Almansi
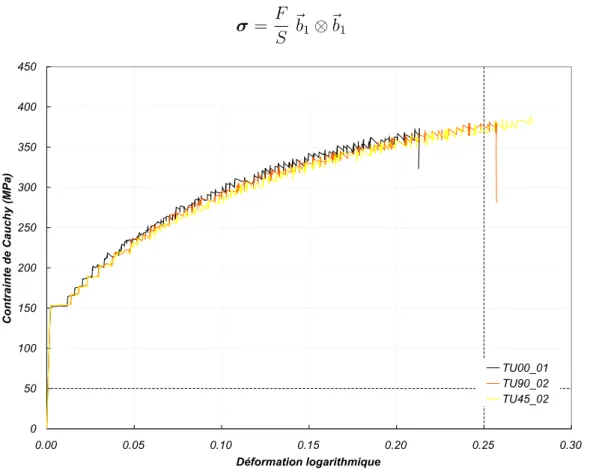
- Tenseur des contraintes de Cauchy
- D´ eriv´ ee convective
- Tenseur des vitesses de d´ eformation
La position du point matériel M à un instant t peut être déterminée à l'aide d'un système de coordonnées curvilignes θi (i = 1,2,3). La dérivée matérielle en un point fixe matériel dans l'espace d'un tenseur d'ordre 2 est exprimée.

Formulation variationnelle
Ensuite, un de nos domaines d'étude (explosions et impacts) a nécessité de considérer l'effet de la vitesse de déformation. Il prend en compte la dépendance du comportement au degré de déformation.
Principe de superposition
Enfin, dans le cadre de la modélisation de matériaux composites élastomère-tissu, le comportement du tissu peut provoquer d'importantes déformations élastiques des fibres et de la matrice. Lorsque de telles déformations sont prises en compte, il est clair que le comportement orthotrope classique ne peut plus être pris en compte en raison de la perte de symétrie du matériau.
Mod` ele hyper´ elastique
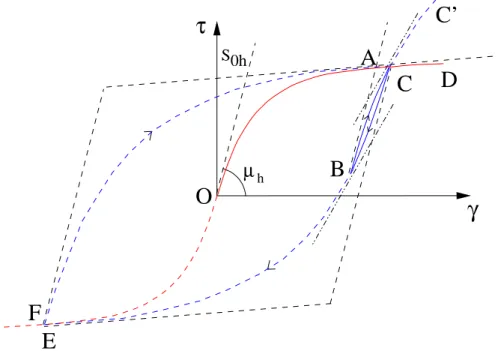
Par exemple, si l’on veut que la partie isotrope du tenseur des contraintes soit indépendante de la phaseϕ, une solution triviale est que E ne dépend pas de ϕ. 2.1 – Signification des paramètres matériaux de la loi hyperélastique sur un essai de cisaillement simple (figure de gauche) et un essai de traction uniaxiale (figure de droite).
Mod` ele d’hyst´ er´ esis pure
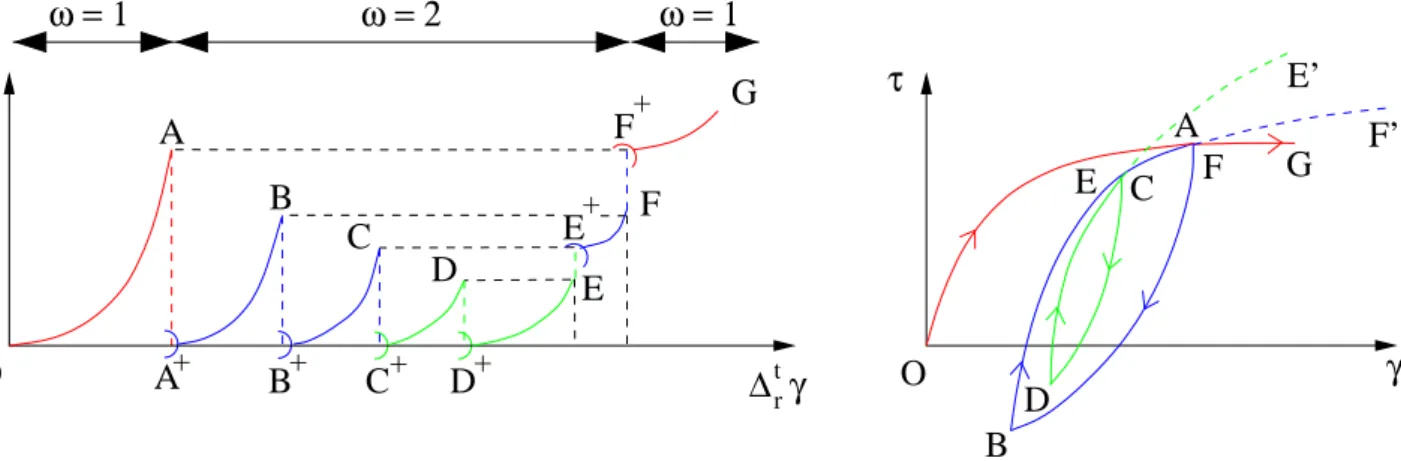
La valeur tr du paramètre de progression représente une situation de référence correspondant à l'état initial lors du premier chargement et au dernier état d'inversion dans le cas courant. 2.4 – Signification des paramètres matériaux de la loi d'hystérésis pure pour un essai de cisaillement simple (figure de gauche) et pour un essai de traction simple (figure de droite).
Mod` ele viscoplastique de Norton
Dans l’hypothèse de déformation isovolume, la figure (2.4) met en évidence le rôle des paramètres matériaux du modèle d’hystérésis pure dans le cas du cisaillement et de la traction simple, respectivement. Cette loi de comportement a été appliquée au calcul de la déformation d'une inclusion viscoplastique noyée dans une matrice viscoplastique [Manach et Couty (2001)].
Mod` ele orthotrope entraˆın´ e
L'hypothèse d'orthotropie entraînée conduit à des coefficients A et B qui restent constants pendant la déformation, c'est-à-dire que le repère d'orthotropie suit la rotation de la base naturelle ; on obtient dans le cadre déformé. L'originalité de ce modèle est donc que, comme dans le cas de l'orthotropie linéaire, seuls 9 coefficients peuvent être retenus pour décrire l'orthotropie non linéaire.
Mod` ele d’´ elastohyst´ er´ esis : application aux alliages ` a m´ emoire de forme
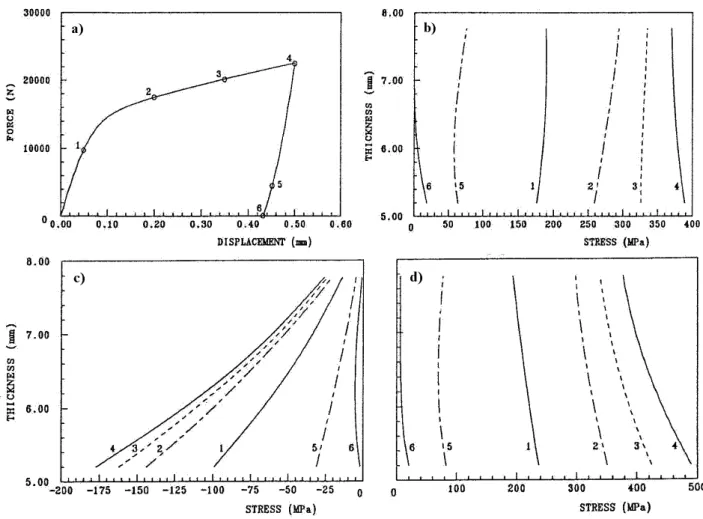
On voit sur la figure (3.2.b) que la répartition de la contrainte σI dans l'épaisseur du joint augmente du rayon interne vers la surface externe à mesure que la déformation augmente. Lors du déchargement, la répartition des contraintes σ montre que la face interne reste soumise à des contraintes résiduelles.
Mod` ele d’´ elastoviscohyst´ er´ esis : comportement dynamique d’un acier doux
Identification des param` etres mat´ eriau
L'identification de la contribution des contraintes viscoplastiques est réalisée à l'aide des résultats d'essais de compression obtenus à différents niveaux de déformation. Ainsi, la contrainte viscoplastique σvp est fonction de la vitesse de déformation ˙ dans le sens de traction ou de compression, selon.
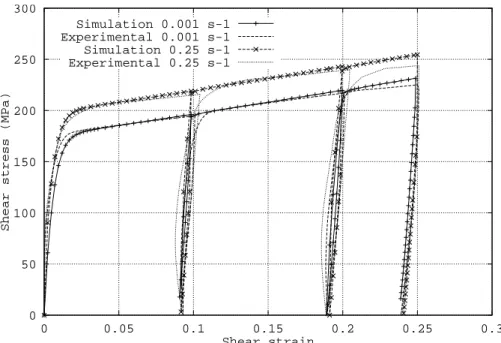
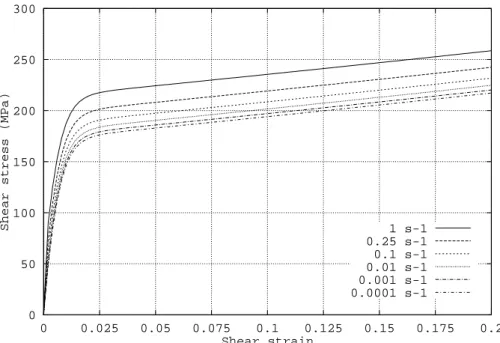
Cisaillement ` a diff´ erentes vitesses de d´ eformation
Tab.3.2 – Paramètres matériau K (en MPa.sm) et m de loi Norton-Hoff identifiés pour différentes valeurs de déformation. Tab.3.3 – Paramètres matériaux de la loi d'élastohystérésis identifiés par la méthode inverse dans un essai de compression à ˙= 10−3s−1.
Mod` ele d’orthotropie entraˆın´ ee : application aux composites ´ elastom` ere-tissu
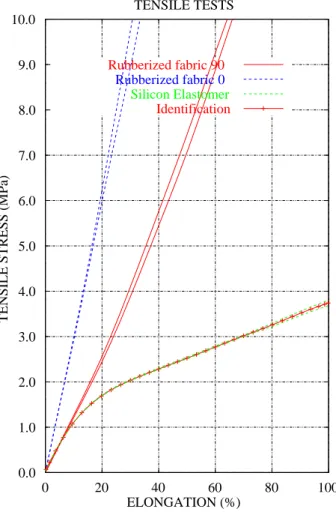
Etude exp´ erimentale
Tab.3.4 – Paramètres matériaux de la loi hyperélastique des couches d'élastomère silicone. Tab.3.5 : Paramètres matériau de la loi orthotrope entraînée de la couche de tissu enduit.
Simulation num´ erique du comportement de tuyaux flexibles
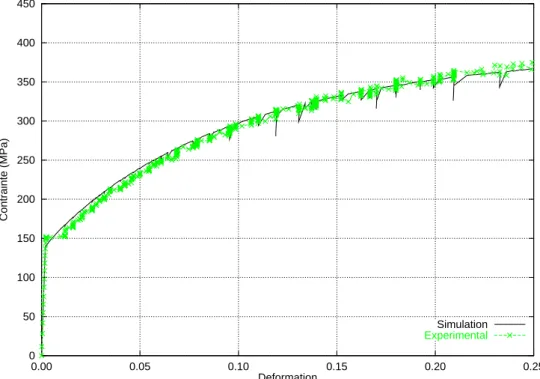
Cependant, en raison de la complexité du processus, il est nécessaire de valider les simulations numériques en comparant les résultats simulés aux résultats expérimentaux. Pour ce faire, les conférences internationales sur la simulation numérique 3D du formage de tôles [Makinouchi et al. (1993)] [Lee et al. (1996)].

M´ ethode de l’´ etat local
Comportement ´ elastique
Comportement plastique
- Surface de plasticit´ e
- Ecrouissage isotrope
- Ecrouissage cin´ ematique
- Ecoulement plastique
- Crit` ere de Hill 1948
- Crit` ere de Barlat 1991 avec ´ ecrouissage cin´ ematique
Dans le cas d'un écoulement associé (ce qui est le cas lorsque la fonction de charge est quadratique et le forçage cinématique est linéaire), ce potentiel est identifié par la fonction de charge f. Dans le cas de la plasticité non visqueuse, si l'on considère un critère de plasticité quadratique (ce qui est le cas au chapitre 6), on peut le montrer.
Extension aux cas des grandes transformations
D´ ecomposition du taux de d´ eformation
Dans les transformations finies, D et σ/ρ (où ρ est la densité du solide) sont des variables privilégiées dans le référentiel E. Il existe une famille unique de cibles de référentiels locaux Rc telles qu'à tout moment et à tout moment la vitesse de la rotation du milieu par rapport à ce référentiel n'est rien.
D´ ecomposition multiplicative du gradient de transformation
Enfin, la loi de comportement doit être invariante vis-à-vis d'un changement de référentiel d'observation (principe d'objectivité [Sidoroff (1982)]). Dans le cas présent, le principe d'objectivité sera satisfait si la loi de comportement est formulée par rapport à la configuration naturelle relâchée CR [Green et Naghdi (1965)] [Lee (1969)] et que toutes les quantités tournent à la vitesse de rotation W.
Loi ´ elastoplastique
Le but de cette étude est de déterminer les paramètres du matériau et de valider la loi de comportement sur de nombreux chemins de déformation différents. Les paramètres sont déterminés à partir d'essais de traction et de cisaillement pour différentes orientations dans le plan de la plaque, d'essais de traction à plat et d'expansion biaxiale (essai de renflement).
Essais m´ ecaniques
- Essais de traction uniaxiale
- Essais de cisaillement
- Essais d’expansion biaxiale
- Essais de traction plane
5.2 – Mesure des coefficients d'anisotropie de Hill en déterminant la pente de la droite dp22=f(dp33) lors d'un essai de traction. Lors d'un test de traction plan, le gradient de la transformation est tel que seul F11 est imposé.
Mod` ele de comportement
Identification et validation
La simulation des essais de cisaillement monotone de la figure (5.11) produit également de très bons résultats. En ce qui concerne les essais de cisaillement cyclique de la figure (5.12), il faut considérer l'écrouissage cinématique pour décrire l'effet Baushinger.
Mod` eles d’´ ecrouissage
Le second est un modèle d'écrouissage mixte, où l'écrouissage isotrope est modélisé par une loi de Voce (voir équation (4.10)) et l'écrouissage cinématique est non linéaire du type de l'équation (4.11). Enfin, le troisième modèle est le modèle de surfaçage mixte de Teodosiu et Hu.
Etude exp´ erimentale de l’emboutissage inverse
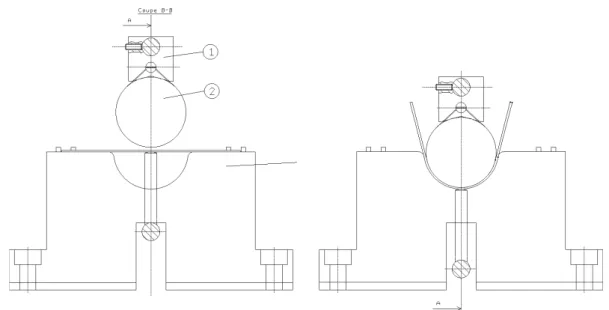
Comme dans la première étape, le serre-flan est relié au champignon par des vis et est placé à distance constante de la tête par réglage des cales. En raison de la courbure du godet près du fond, il n'a pas été possible de mesurer une épaisseur inférieure à 7 mm pour le premier étage et à 12 mm pour le deuxième étage.
Simulation num´ erique de l’emboutissage inverse
Etape 1
On constate un amincissement de la plaque en dessous d'une hauteur d'environ 25 mm (entre 18 mm et 30 mm) et un épaississement au dessus. Il se produit alors une compression circonférentielle et par conséquent un épaississement de la plaque.
Etape 2
Pour éviter de tels problèmes, la taille des éléments de maille doit être inférieure à 20 % du rayon de courbure de la matrice, ce qui correspond à 1,6 mm pour la première étape (la taille des mailles est d'environ 3 mm). La déformation élastique de la presse et du serre-flan ne semble donc pas avoir d'influence significative sur ce type de procédé d'emboutissage profond.
Changement de trajets de d´ eformation
Lors de la première étape, on rencontre des valeurs de l'ordre de 0,3 - 0,5, et dans la seconde, des valeurs proches de 0. On remarque que les changements de trajectoire les plus importants se produisent lorsque les chocs se déplacent entre 20 et 40 mm. lors de la deuxième étape.
Etude exp´ erimentale du retour ´ elastique
Fig.6.9 – Courbes force-déplacement du tampon expérimental et numérique pour l'aluminium Al6111-T4 dans le DL. Des images en niveaux de gris sont incluses pour différentes valeurs de déplacement du poinçon (respectivement mm et après retour élastique).
Simulation num´ erique de la flexion cylindrique
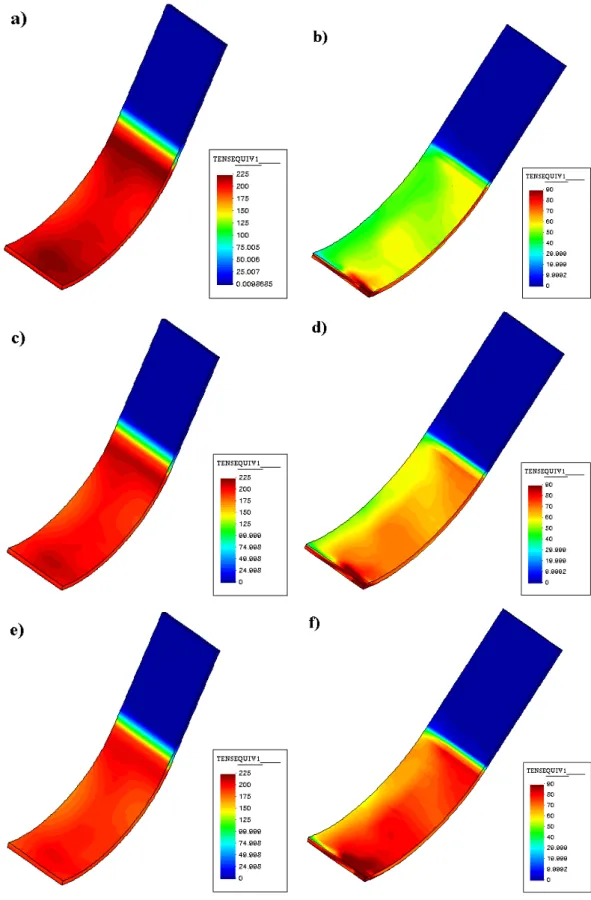
6.12 – Répartition de la contrainte équivalente en fin de chargement (images à gauche) et après reprise élastique (images à droite). a) et b) correspondent au modèle d'écrouissage isotrope de Swift, c) et d) au modèle d'écrouissage mixte de Voca, et e) et f) au modèle de Teodosiu et Hu. Dans une première partie, nous présentons un modèle micromécanique capable de prendre en compte l'évolution de la microstructure du matériau, et comparons ce modèle avec l'œnoménologie du modèle ph utilisant le critère de Hill.
Mod` ele de comportement
Description de la transformation aust´ enite-martensite
7.2 – Evolution de la fraction volumique de martensite en fonction de la déformation plastique pour différentes températures, obtenue par la loi de Shin et al [Shin et al.(2001)]. La loi d'évolution de la fraction volumique de martensite fM s'exprime donc en fonction du critère g(A,σA) selon l'expression.
Transition d’´ echelles et homog´ en´ eisation
La transition d'échelle pour chaque composante est décrite par une relation de la forme [Forest et Pilvin (1999)]. E˙p = (1−fM) ˙pA+fM ˙pM + ˙fM (pM −pA) (7.5) Ce modèle nécessite donc la connaissance de la fraction volumique de martensite et inclut les coefficients matériaux suivants .
Identification du comportement des mat´ eriaux
En revanche, dans la simulation des tests successifs dans le cas du degré 304, on constate que le modèle biphasé améliore significativement la corrélation par rapport aux résultats expérimentaux. Le modèle diphasique est initialement représenté par le comportement de l'austénite, qui est à l'origine la seule phase présente.

Simulation num´ erique de l’emboutissage d’un godet cylindrique
NotoLaDiega, 1990, Analyse par éléments finis du processus d'étirage inversé, Journal of Material Processing Technology, 24, pp.441-450. Lovato, 2004b, Identification des modèles de comportement, des matériaux et des techniques d'emboutissage de l'acier inoxydable, 3-4, pp.3-12.