7 1.5 Géométrie de l'échantillon de pied de pale en vue de face et vue de dessous. 42 4.6 Vue du visage observé par CIN lors de l'essai avant dépôt du colorant.
Pr´esentation g´en´erale des composites
Composites tiss´es 3D
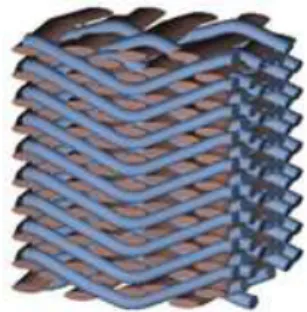
FIGURE1.1 : Exemple d'un composite tissé 3D de type verrou orthogonal en vue longitudinale [Quinnet al., 2008]. FIGURE 1.2 : Exemple d'un composite tissé 3D de type couche-couche en vue longitudinale [Sunet al., 2005].
Sp´ecificit´es du mat´eriau de l’´etude
Dans ce cas, la buée est limitée, mais en contrepartie, les propriétés mécaniques dans la troisième direction sont également réduites par rapport aux tissages précédents [Brandtet al., 1996]. Le matériau étudié est un composite tissé de type entrelacement couche par couche permettant d'améliorer les propriétés hors plan par rapport aux matériaux composites stratifiés. [Gu'enonet al., 1989, Mouritzet al., 1999, Mouritz, 2008] .
Eprouvettes test´ees
FIGURE 1.5 : Géométrie du spécimen de pied de pale en vue de face et vue de dessous. Dans le premier cas de coupons courts, le matériau est considéré comme homogène et les directions d’orthotropie sont constantes dans tout l’échantillon.
Echelle microscopique
Echelle m´esoscopique
Echelle macroscopique
Changement d’´echelle
La méthode d'inclusion Eshelby suppose également une connaissance précise de la forme et de la position du toron dans la pièce réalisée. De ce fait, la connaissance du positionnement, de la forme et des propriétés locales des brins reste approximative, et les propriétés mécaniques résultant de l'homogénéisation sont fortement influencées par ces approximations.
Essais
En effet, la taille caractéristique de l’hétérogénéité doit être petite devant la taille de l’ensemble à considérer, elle-même devant être petite devant la taille de la structure. De plus, le traitement de préformage provoque des dommages plus ou moins importants aux fibres, pouvant modifier localement les propriétés du composite.
Approche globale
Le niveau de gris du pixel (respectivement l'interpolation des pixels voisins) est lu aux coordonnées de. Le niveau de gris retenu est donc le résultat de l'interpolation des niveaux de gris de ces quatre pixels.
Etude d’incertitude CIN
Tracez les niveaux de gris de f par rapport à celui de deg pour tout point avec des coordonnées x dans l'image. Il est montré que l'interpolation sous-pixel des niveaux de gris joue un rôle primordial dans l'estimation sous-pixel de la position d'un point dans l'image.
Cadre g´en´eral
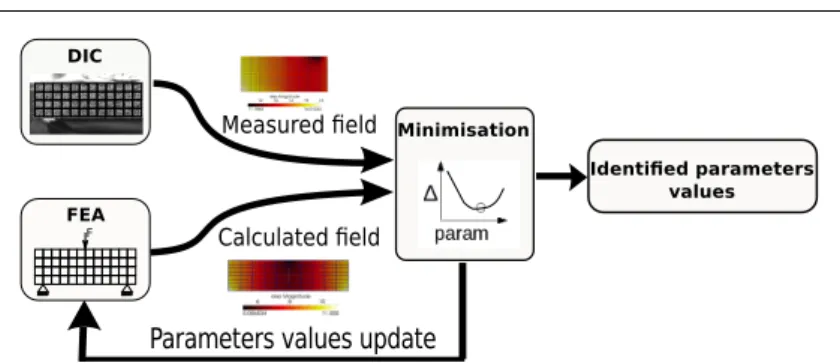
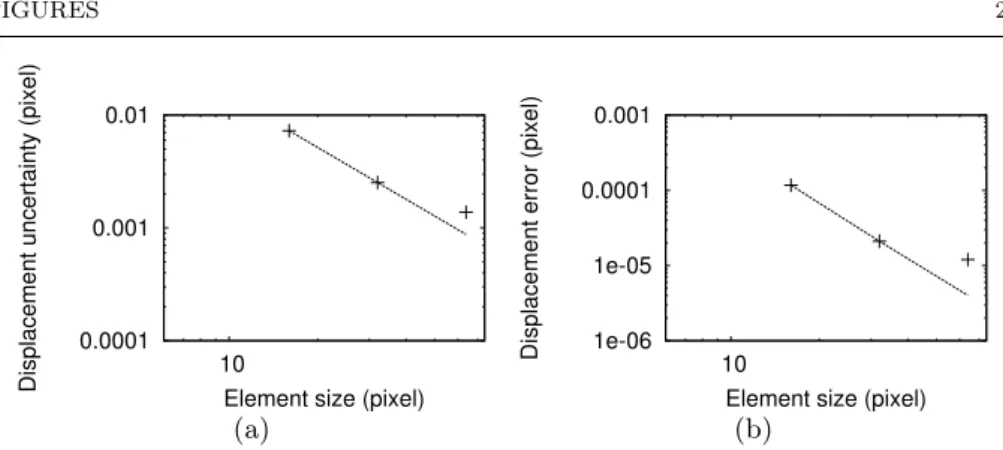
Enfin, les résultats des champs de déplacement mesurés sont obtenus ci-dessous en prenant le jeu de paramètres CIN J5cub. FIGURE 3.7 : Incertitude (a) (respectivement (c)) et biais (b) (respectivement (d)) pour les jeux de paramètres avec interpolation bilinéaire de sous-pixels (respectivement spline cubique).
Choix de la FEMU
Ceci est caractérisé par la matrice de covariance du champ de déplacement, humei umej i. La matrice C est donc prise comme matrice de covariance du champ de déplacement mesuré, [C] =humei umej i.
Description de l’essai
La surface observée de l'échantillon correspond au plan du composite tissé 3D, brins de chaîne. FIGURE 4.3 : Maillage FE 2D modélisant l'ensemble de l'échantillon superposé à la zone observée pour CIN.
Mod´elisation
R´esum´e de l’article
Quant à la direction x, la périodicité de la mésostructure est trop importante pour la zone observée, la taille de maille correspondant au plus petit résidu permet une description assez fidèle de la cinématique d'essai, tout en restant dans la description macroscopique du champ de déplacement. On voit donc que l’identification des paramètres matériaux du comportement macroscopique sur un tel échantillon dépend fortement de la mésostructure.
Robustesse de l’identification
Plus la contrainte est élevée, plus le résiduel adimensionnel augmente, mettant en évidence l’écart entre la modélisation choisie et le comportement réel du matériau. Dans la partie suivante, nous verrons combien il est important de considérer la modélisation pour une description correcte du comportement des matériaux.
Mat´eriau
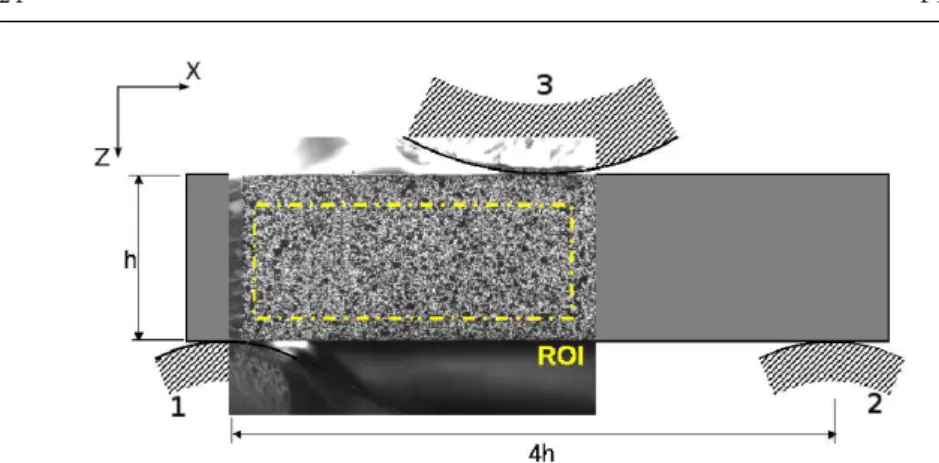
FIGURE 4.6 : Une image du visage observé par CIN lors du test avant dépôt des spots. Une image du visage observé lors du test avant dépôt des taches est présentée sur la figure 4.6.
Description de l’essai
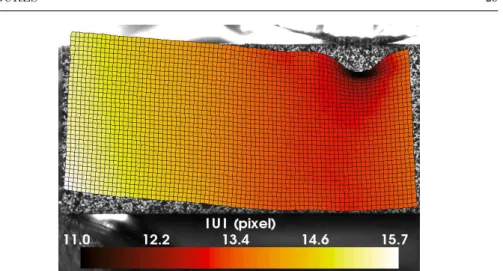
FIGURE 4.10 : Carte résiduelle de corrélation correspondant au champ de déplacement mesuré entre l'image de référence 80 et l'image déformée 104. FIGURE 4.11 : Champ de déplacement mesuré entre l'image de référence 80 et l'image déformée 125, composante selon l'axe (a).
M´ethode num´erique
Cependant, l'incertitude sur les valeurs nominales est souvent prise indépendamment, nous prendrons donc Cnomii j = (σnomii )2δi j. Par conséquent, les incertitudes sur les paramètres macroscopiques des matériaux peuvent être élevées et doivent être prises en compte.
Mod´elisation avec interface parfaite
Cela donne des incertitudes sur les paramètres macroscopiques équivalents des matériaux deux à trois fois plus grandes que sur les matériaux d'entrée. Quatrièmement, les paramètres du matériau relatifs à la direction 2 sont fixes et ont très peu d'influence sur le champ de déplacement pour une charge de flexion. Ceci tend à confirmer qu'il y a bien un changement dans le comportement de l'interface et que cela affecte les modules identifiés. Cependant, la valeur des modules de cisaillement identifiés diminue au cours de l'essai, indiquant un endommagement progressif du matériau, alors que la déformation macroscopique est élastique linéaire.
Ceci semble prouver que la modélisation d’une interface parfaite utilisée ici n’est pas suffisante pour décrire le comportement du matériau.
Mod´elisation avec interface ´elastique
Du fait de la modélisation uniforme du comportement de l'adhésif sur l'ensemble de l'éprouvette, un compromis est trouvé entre les pièces droite et gauche. La contrainte de traction est imposée à l'aide d'une fente sur le dessus de l'éprouvette de jambe. La position des capteurs LVDT est marquée sur le plan de la jambe d'essai (b).
Le champ de déplacement résultant de la minimisation de l'équation 5.5 est représenté sur la figure 5.9.
Approximation faite par la mod´elisation 2D
FIGURE 5.11 : Maillage FE enregistré sur l'image de référence après projection des nœuds de bord à la limite réelle de l'échantillon. Tout d’abord, sur la face supérieure de l’échantillon, nous appliquons le déplacement mesuré par CIN à la ligne supérieure de la grille 2D et extrapolons à l’épaisseur, c’est-à-dire le long de l’axe y. Le champ de déplacement calculé du pied d'aube est représenté sur la figure 5.13 selon les trois axes définis dans les figures précédentes.
Pour caractériser cette erreur, la différence entre ce calcul 3D et un calcul 2D est tracée sur la Figure 5.14.
Mod´elisation EF homog`ene
Cela affecte le résultat de l'identification, cependant dans cette étude nous choisissons de nous limiter à une modélisation 2D pour le calcul FE et pour la mesure de champ par CIN. Le désalignement du cylindre de traction et de la mâchoire provoque une contrainte de flexion (Fig. 5.6). Cependant, la projection de la force de traction, mesurée le long de l'axe du cylindre, sur l'axe de l'image conduit à une faible erreur, 1−cos(0,27)≃10−5.
On suppose alors que la force mesurée selon l’axe du cylindre de traction est égale à la force selon l’axe de l’image.
Identification
Ces champs reflètent l'impact des différents paramètres identifiés sur le champ de décalage calculé. L'analyse d'incertitude consiste à définir l'impact du bruit du capteur CCD sur les paramètres du matériau identifiés. A partir de la connaissance de la matrice [N] à la convergence de l'algorithme d'identification et de l'équation 5.16, on peut obtenir les incertitudes des trois paramètres matériaux identifiés dans ce cas.
On peut également effectuer cette opération avec le champ de déplacement calculé à la convergence de l'algorithme d'identification.
Mod´elisation avec zonage mat´eriau
It shows the improvement in identification that comes from using the DIC correlation matrix. 13 Horizontal x-component (a) (respectively (c)) and vertical x-component (b) (respectively (d)) of the difference between measured and calculated shear fields. Based on knowledge of the mesostructure and its mechanical properties [7], the elastic behavior of such materials can be modeled based on the homogenization theory [8, 9, 10].
In the following, let us focus on the uncertainty obtained by convergence of the identification algorithm.
Etude spatio-temporelle
Le problème d’identification concerne l’obtention des paramètres matériels d’un comportement supposé. Puisque nous recherchons une solution unique au problème sur l’ensemble du chargement, nous pouvons utiliser toutes les paires d’images pour identifier les paramètres du matériau. Dans l'essai sur l'échantillon de racine de feuille, la charge élastique correspond à la charge de traction totale.
L’essentiel ici est de profiter de toutes les informations disponibles lors du test pour identifier un ensemble de paramètres essentiels.
CIN int´egr´ee
Champ de d´eplacement mesur´e entre l’image de r´ef´erence 80 et l’image
Domaine maill´e avec des ´el´ements triangulaires dont les cˆot´es font 32
Incremental corrections of the displacement fieldδu(n+1) are calculated based on the minimization of the linearized form of the objective functional Tlin. It provides a positive-definite weighting of the kinematic degrees of freedom based on the measurement. The load is applied to the upper part of the sample by a hydraulic jack (Figure 2).
The location of sensitive parts is mainly in the lower part of the fan blade root, which corresponds to large variations in the displacement field. The quantification of the uncertainty of each identified parameter based on the identification method is now addressed. Let {δu} and {δp} denote the deviations from the exact value of the displacement field and the material parameters due to noise.
The standard deviation of the displacement obtained for each node is also shown on the mesh (Figure 11c-d). To better understand the standard uncertainty, it is useful to diagonalize matrix[N].
Domaine maill´e avec des ´el´ements triangulaires dont les cˆot´es font 32 pix-
Domaine maill´e avec des ´el´ements triangulaires dont les cˆot´es font 32 pix-
Incr´ement calcul´e `a chaque it´eration n pour les modules ´elastiques (a) et
Carte des r´esidus issus du champ de d´eplacement calcul´e pour l’image
FIGURE 4.18 : Carte des résidus du champ de déplacement calculé pour la Figure 100 pour une modélisation d'interface parfaite.
Maillage avec interface (a) dont les trois zones mat´eriau sont la partie
Carte de sensibilit´e dU/dG 1 13 suivant l’axe x (a) et l’axe z (b)
Carte de sensibilit´e dU/dG 2 13 suivant l’axe x (a) et l’axe z (b)
Carte de sensibilit´e dU/dG inter f ace
Carte de sensibilit´e dU/dE 1 1 suivant l’axe x (a) et l’axe z (b)
Carte de sensibilit´e dU/dE 1 2 suivant l’axe x (a) et l’axe z (b)
Carte de sensibilit´e dU/dE 3 1 suivant l’axe x (a) et l’axe z (b)
Carte de sensibilit´e dU/dE 3 2 suivant l’axe x (a) et l’axe z (b)
Carte de sensibilit´e dU/dν 1 13 suivant l’axe x (a) et l’axe z (b)
Carte de sensibilit´e dU/dν 2 13 suivant l’axe x (a) et l’axe z (b)
The incremental corrections to the displacement field δu(n+1) are calculated by minimizing the linearized form of the objective functional, Tlin. The results of the first step, shown in Figure 9, show that the iterative scheme converges.