Seul le cas des sources interconnectées et des DDA étroites permet une amélioration de l'estimation. Dans le domaine du traitement d'antennes, de l'analyse bio-médicale ou encore de l'analyse vibratoire, on peut avoir une connaissance a priori d'un sous-ensemble réduit des paramètres d'intérêt.
Introduction
Les Méthodes Haute Résolution
- Généralités
- Formalisme matriciel pour l’estimation des DDA
- Modèle d’antenne linéaire
- Les méthodes du Maximum de Vraisemblance
- Les méthodes sous-espaces
- L’algorithme MinNorm
- Performances et comparaison des algorithmes MUSIC et MinNorm
- Estimation de l’ordre de modélisation
- Le Subspace Fitting
Ces critères conduisent à maximiser le rapport de la moyenne géométrique des valeurs propres du sous-espace de bruit à leur moyenne arithmétique. On obtient alors les bases E et G définies en (1.2.6) et (1.2.5) respectivement (on prendra leurs estimations Eˆ et G), notons que plus de détails sur le lien entre la SVD de la matrice d'observation et les valeurs propres (ou vecteurs propres) de l'estimation de la matrice de covariance associée peuvent être trouvés dans [Veen et al., 1993].
Les Projecteurs Obliques
Introduction
L'étape suivante de la modélisation du bruit consiste à supposer que le bruit est corrélé en appliquant une densité de probabilité appropriée au vecteur aléatoire représenté par le bruit. On appelle alors "bruit structuré" les composantes de bruit appartenant au sous-espace signal.
Algèbre des Projecteurs Obliques
Pour le projecteur E(B A) est R(B) le sous-espace de projection et R(A) est le sous-espace directionnel. Nous avons donc déterminé que le sous-espace de projection de E(A B) est R(A), et que son noyau est R([BN]).

Position du problème
Structure de la covariance spatiale
Déflation et a priori
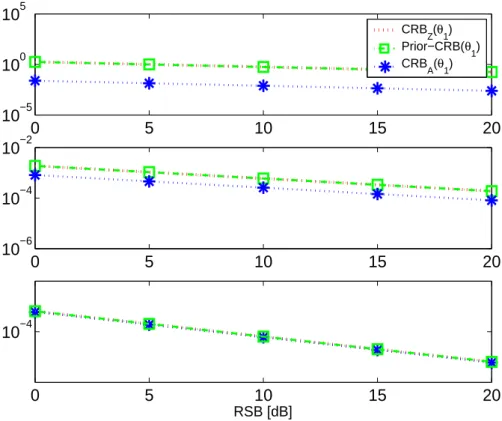
Dérivation et analyse de la Prior-CRB
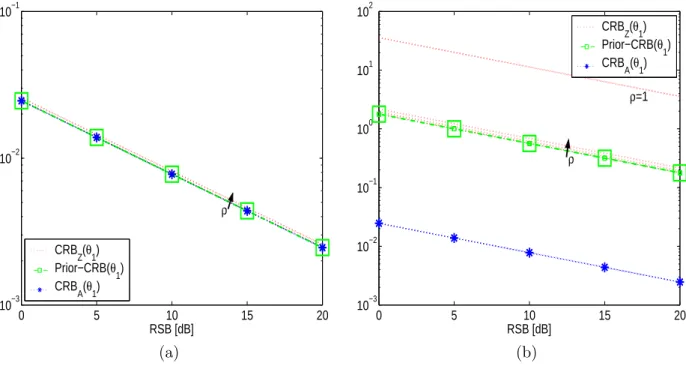
Les expressions (2.10) et (2.11) sont respectivement le CRB associé au sous-espace d'intérêt, R(A) et associé au sous-espace signal complet, R(Z). Si les sources ne sont pas corrélées et selon la propriété (i), on ne peut pas espérer avoir de meilleures performances que le CRB correspondant au sous-espace d'intérêt, R(A).
Algorithmes de type prior MUSIC (MUSIC a priori )
Si les DDA connus et inconnus ne sont pas corrélés, les sources connues ne sont pas cohérentes et les DDA sont éloignés, alors les propriétés (iii) et (v) impliquent que tous les CRB sont mélangés. Un point important, cependant, est que pour la propriété Lfinite (iv) implique que le projecteur orthogonal n'annule pas complètement l'influence des DDA connus dans l'estimation des inconnues et donc le CRB associé aux DDA qui nous intéressent pour la matrice de covariance diagonale par blocs dont les DDA sont proches. Par conséquent, dans un contexte limitant, comme un faible SNR ou lorsque les DDA sont proches, on peut imaginer que cette approche est sous-optimale.
Ainsi, pour les DDA connus, α¯ n'est pas une solution de norme minimale, ou en d'autres termes, la fonction de coût C(¯αZ, ω) n'atteint pas sa valeur minimale en fonction de αZ pour les DDA connus.
Implémentation du critère WP-MUSIC
De plus, les algorithmes WP-MUSIC et P-MUSIC basés respectivement sur les critères C( ¯α, ω) et C(˜α, ω) sont asymptotiquement équivalents. Cette nouvelle version "root" de l'algorithme spectral WP-MUSIC est sans doute moins chère. Nous donnons ici à nouveau une version "racine" de l'algorithme WP-MUSIC basée sur l'expression (2.23), car nous considérons que cette dernière révèle et met clairement en évidence le lien entre Root WP-MUSIC et Root-C-MUSIC.
Cependant, pour les deux raisons déjà citées et expliquées dans la section 2.2.3, il est préférable d'utiliser l'expression (2.22) pour implémenter l'algorithme Root WP-MUSIC basé sur la résolution du polynôme p(1/z)T“.
Simulations numériques
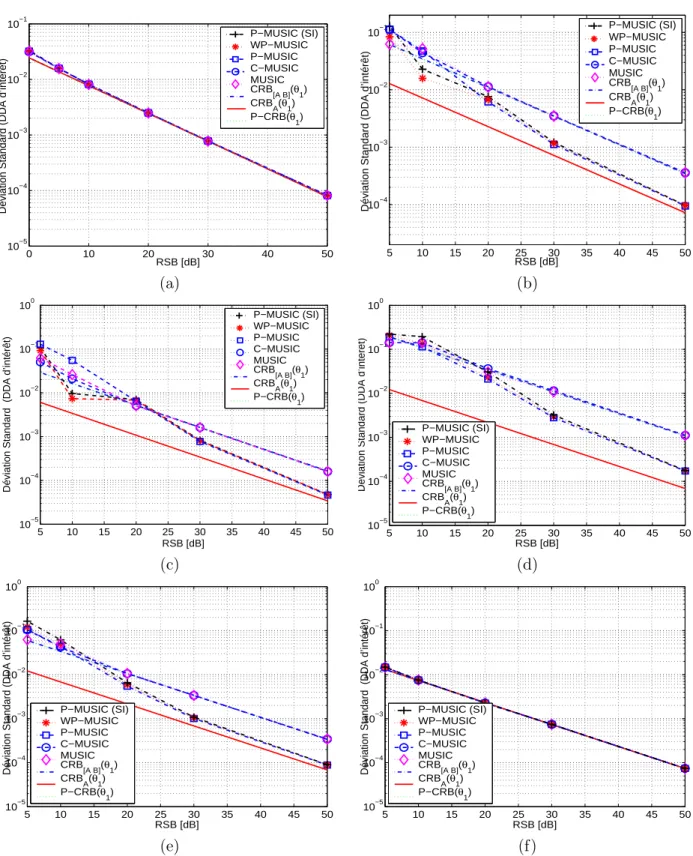
WP-MUSIC : Algorithme MUSIC à connaissance a priori basé sur la pseudo-inverse oblique pondérée (voir Section IV.B). L'analyse des figures 2.5-b et c nous montre que l'algorithme WP-MUSIC est plus efficace que l'algorithme P-MUSIC à faible SNR (≈10 dB) et pour des DDA proches. Pour un petit nombre de capteurs, l'algorithme WP-MUSIC est l'algorithme avec les meilleures performances et robustesse à une petite erreur DDA connue.
Comme expliqué dans la section 2.2.2, ainsi que dans la partie simulation, l'algorithme P-MUSIC est légèrement moins efficace que l'algorithme WP-MUSIC.
Conclusion
En particulier, la précision d'estimation de cet algorithme est proche de celle donnée par le CRB associé au sous-espace d'intérêt. L'algorithme P-MUSIC (SI) a des performances similaires aux algorithmes P-MUSIC et WP-MUSIC à SNR élevé, mais cet algorithme reste moins efficace et précis dans de nombreux cas. Pour un petit nombre de capteurs et dans le cas de DDA proches, dont la matrice.
Pour un grand nombre de capteurs et/ou de sources distantes, cet algorithme est équivalent à tous les algorithmes basés sur des projecteurs obliques.
L’algorithme MinNorm avec connaissance a priori : variances théoriques et
- Introduction
- Formulation des algorithmes Weighted Prior-MinNorm, et Prior MinNorm 53
- Validation numérique
- Variances asymptotiques et comparaison avec l’algorithme MinNorm . 57
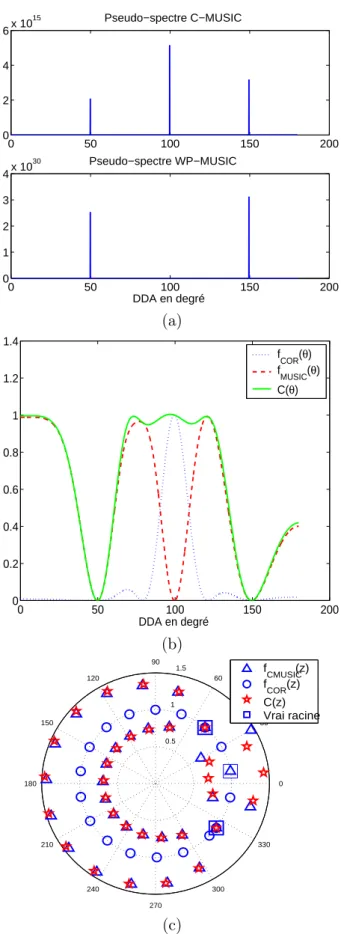
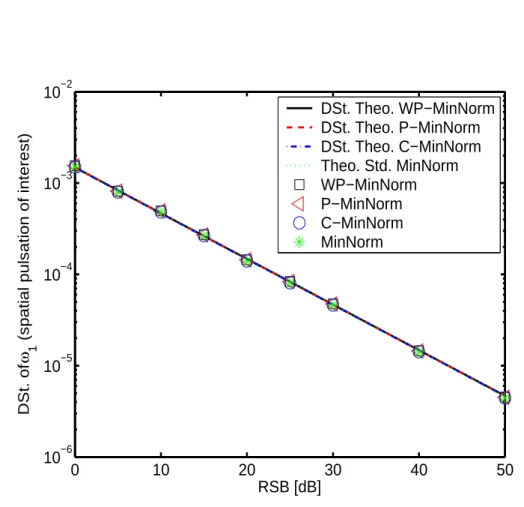
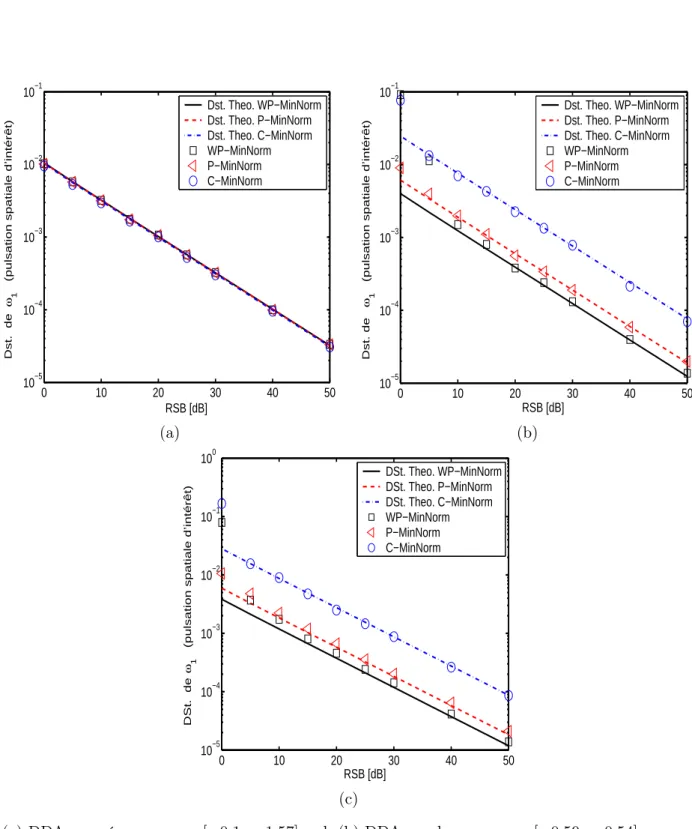
L'analyse de (2.49) nous permet d'interpréter l'algorithme WP-MinNorm comme la somme du critère C-MinNorm et d'une fonction de correction que nous appelons fCOR(z).7. 2.7-b, en revanche, nous indique que les algorithmes WP-MinNorm et P-MinNorm ont chacun une variance plus faible que la variance de l'algorithme Root Constrained MinNorm lorsque les DDA sont proches. Par conséquent, pour des pulsations DDA/spatiales proches, l'algorithme WP-MinNorm a une meilleure précision que l'algorithme P-MinNorm.
2.10-b montre que ρ2(∆ω, L) ≤ 1, ce qui implique que l'algorithme P-MinNorm est nettement plus efficace que l'algorithme C-MinNorm.
Conclusion
Annexes
- Demonstration de la proposition 1
- Demonstration du Théorème 1
- Demonstration du Théorème 2
- Demonstration du Théorème 3
- Preuve du Théorème 4
- Preuve du Théorème 5
- Dérivation des déviations
- Preuve du Théorème 6
- Preuve du Théorème 7
- Critère spectral
- Analyse de la fonction de forçage à zéro
Une erreur commise dans RY implique directement une erreur dans l'estimation de la base. De plus, nous proposons des expressions théoriques du biais et de la variance de cet algorithme. Nous rappelons également que la covariance spatiale est donnée par son estimation empirique comme suit.
Sans perte de généralité, on suppose que Le est grand, la fonction de forçage à zéro s'écrit alors comme suit.
Dérivation et analyse de la CRB déterministe structurée (CRB S )
CRB structurée
Pour déterminer l'expression de CRBS, nous "vectorisons" le modèle (1.54) de la manière suivante. Dans le modèle (3.8), le but est d'estimer les DDA associés au signal déterministe, Xm, contaminé par une interférence structurée et non structurée modélisée par le vecteur X¯m+σn. Soit maintenant le vecteur du signal plus les paramètres de nuisance pour le m-ième signal défini par χm = [χ′Tm ζTm]T où χ′m = [ωm ℜe{λm}T ℑm{λm}T]T est le vecteur des paramètres d'intérêt et où le vecteur des paramètres de nuisance est donné par ζm = [ϕTm σI2 σ2]T avec ϕm = [ ω 1.
En se référant aux propriétés statistiques du signal Y dérivées dans la section précédente et en utilisant le fait que les paramètres du signal et les paramètres de nuisance sont découplés [Stoica et Moses, 2005], l'expression (3.12) pour le sous-vecteur χ′m peut être réécrite comme suit.
Analyse de la CRB S
De plus, le CRB associé aux interférences structurées connues sans erreurs, c'est-à-dire le Prior-CRB vu au chapitre 2 et dans [Boyer et Bouleux, ], est donné par la relation. Nous pouvons maintenant fournir une analyse comparative des différents terminaux comme suit. Le théorème ci-dessus montre que pour les directions étroites, le CRBS a deux régimes principaux en fonction de la valeur (ordre de grandeur) du RIB.
Enfin, rappelons que (i) pour de petites valeurs (valeurs concrètes) du nombre de capteurs et pour des directions espacées et (ii) pour un grand nombre de capteurs, toutes les bornes sont confondues.
Analyse au premier ordre du biais, de la variance et de l’erreur de propagation 85
Analyse de l’erreur de propagation
L'un des plus gros désagréments des algorithmes séquentiels est sans aucun doute la propagation des erreurs. Nous définissons l'erreur d'estimation sans erreur de propagation comme (∆ωm|εm= 0)ZF et par le théorème 10 nous obtenons. En conséquence, nous pouvons maintenant définir l'erreur de propagation par . 3.26) Enfin, l'erreur de propagation de l'algorithme ZF-MUSIC pour la pulsation spatiale ωm. est donnée par la relation. ii) pour Lzhigh on sait que εm Lz≫1.
Simulations Numériques
- Résultats de Simulation pour la CRB S
- Précision de l’algorithme spectral ZF-MUSIC
- Une résolution fortement accrue
- Principaux résultats de simulation
Cette expérience illustre visuellement la très haute résolution de l'algorithme ZF-MUSIC à faible bruit. Par conséquent, le battement qui est maintenu et inclus dans la fonction de pondération de l'algorithme ZF-MUSIC est le battement estimé par MUSIC, c'est-à-dire ω1. Dans le cas de directions étroites, l'algorithme spectral ZF-MUSIC est nettement plus efficace que les algorithmes S-MUSIC et RAP-MUSIC lorsque le paramètre de sélectivité Lz est élevé (> L).
A faible SNR (et pour des valeurs de SNR modérées), l'algorithme ZF-MUSIC est proche du CRB sans interférence structurée, ce qui correspond à la variance minimale que ce type d'algorithme peut atteindre.
Conclusion
Annexes
- Preuve de la Propriété 1
- Preuve de l’expression (3.6)
- Dérivation de la CRB S , Théorème 8
- Demonstration du Théorème 9
- Démonstration du Théorème 10
Sur la base de cette nouvelle formulation, nous prouvons les propriétés (i) à (vi) comme suit. i) Notez quand la variance de l'interférence non structurée (bruit) domine la variance des sources interférentes (RIB est petit), c'est-à-dire σ2 ≫ σ2I, on a Km ≈ I, puisque I ≫ INR BmBHm. Conformément à la méthode introduite dans [McCloud and Scharf, 2002], nous supposons un SNR suffisamment élevé pour déterminer l'erreur d'estimation (∆ωm)ZF par une seule itération de l'algorithme de Newton [Murray, 1972, Brent, 1973] à partir de la fonctionnelle. Dans la dérivée première de la fonctionnelle ZF-MUSIC, toutes les conditions fonctionnelles pour le projecteur sont P⊥Z (resp.
En identifiant les termes D et ∆D de la même manière que l'identification faite pour G et ∆G, on obtient que
Exploitation des méthodes dans le contexte du diagnostic
Introduction générale
De la même manière que pour le traitement matriciel des DDA, nous supposons avoir la connaissance des fréquences M−S sur l'ensemble M composant le modèle. On suppose que le temps d'analyse correspond à une acquisition de T échantillons et on définit la matrice de Hankel H des données réelles comme suit. Pour obtenir une base du sous-espace signal associé aux fréquences d'intérêt, on utilise une décomposition en valeurs singulières de la partie dégonflée de H, (voir chapitre 2 section 2.2.3) à partir de laquelle on prend les vecteurs de base gauche dominants.
De manière générale, l'analyse vibratoire repose sur l'utilisation de capteurs de grandeurs mécaniques (capteur d'accélération ou de vitesse de déplacement) et est destinée à analyser les vibrations et leur évolution en fonction du vieillissement et donc de la dégradation de la machine.
Diagnostic de défaut d’engrenage
Cette évolution est le fruit des avancées technologiques des capteurs et des outils d'acquisition numérique qui permettent une mise en œuvre plus aisée des méthodes de traitement du signal. La caractéristique la plus frappante du signal est la modulation d'amplitude due à la rotation des roues. Cette famille de raies est répartie sur une grande partie du spectre car la nature du signal de maillage est de type large bande.
De plus, la modulation d'amplitude conduit à la présence de bandes latérales autour des harmoniques entremêlées, à différentes distances des rotations pour la modulation due au pignon, et pour la modulation due à la roue.
Manifestation d’un défaut de denture localisé
En réalité, l'amplitude de toutes les raies est pondérée par la réponse en fréquence de la structure mécanique reliant la source d'excitation au capteur.
Analyse Spectrale
Les signaux proviennent d'une expérience menée par le CETIM1 qui visait à étudier l'apparition d'un défaut et à suivre son évolution sur un rouage composé de 2 roues.
Présentation des signaux
4.4, recueille les signaux réels pour trois jours différents, correspondant à des niveaux de dégradation de défauts de clivage distincts. Le jour 1 correspond au cas sans erreur, les deux premiers chiffres représentent les signaux vibratoires réels. Dans cette expérience, nous voulons tester le pouvoir de résolution des méthodes proposées dans l'espoir de séparer deux harmoniques de rotation très proches avec un nombre limité d'échantillons.
On rappelle ici que la roue porteuse du défaut, au niveau de son harmonique, a une énergie beaucoup plus élevée que l'autre, ce qui complique l'estimation.
Apport des méthodes pour l’estimation des fréquences de rotation
114 4.2 L'utilisation des méthodes dans le cadre du diagnostic. figure 4.5 : DSP du signal de vibration, jour 2. Fréquence cachée prédite 322,68 Hz. Nombre d'échantillons traités T = 1120, fréquence d'échantillonnage fe = 800Hz. a) Pseudospectre de MUSIC Fct. Nous testons les limites d'estimation de l'algorithme WP-MinNorm par rapport à l'algorithme MUSIC, en prenant T = 260 échantillons. Nous montrons que contrairement à l'algorithme MUSIC, l'algorithme ZF-MUSIC permet l'estimation de ces fréquences.
In International Conference on Acoustics, Speech and Signal Processing (ICASSP 88), volume 5, pages New-York.
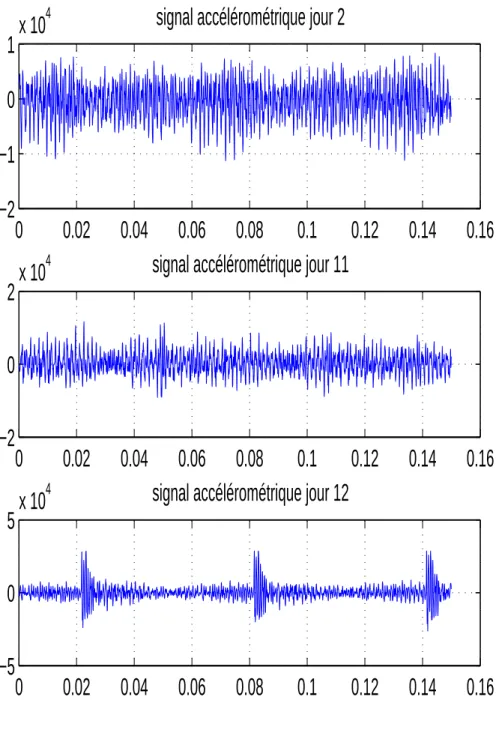
Figure géométrique illustrant la projection oblique
Figure géométrique montrant la projection oblique dans l’espace euclidien
Borne de Cramér-Rao Fct. du RSB
Borne de Cramér-Rao Fct. RSB
Borne de Cramér-Rao Fct. RSB
Explication visuelle des algorithmes C-MUSIC et WP-MUSIC
Déviation Standard Fct. RSB pour deux sources et pour trois sources
Déviation Standard Fct. de l’erreur sur la DDA connue
Déviation Standard Fct. RSB
Déviation Standard Fct. RSB
Fonction de forçage à zéro Fct. des valeurs de L z
Atténuation du premier lobe secondaire Fct. de L z
EQM de ω 2 Fct. RIB
EQM de ω 2 Fct. RSB quand ω 1 est sans erreur
EQM de ω 2 Fct. RSB quand ω 1 est estimée
EQM de ω 2 Fct. RSB quand ω 1 estimée pour des directions éloignées avec des
EQM de ω 2 Fct. RSB quand ω 1 est estimée pour des directions proches avec
Comparaison des Pseudo-spectre MUSIC et ZF-MUSIC
Spectre du signal vibratoire d’un engrenage
Spectre du signal vibratoire d’un engrenage
Evolution du défaut sur la roue
Signaux vibratoires réels
DSP du signal vibratoire, jour 2
Application aux signaux d’engrenage. Illustration de l’algorithme ZF-MUSIC. 115
Application aux signaux de courant d’une machine asynchrone. Pseudo-spectres