Dans ce manuscrit, la caractérisation du milieu océanique est résumée par l'évaluation de la réponse impulsionnelle du canal de propagation acoustique. Premièrement, nous souhaitons évaluer la réponse impulsionnelle du canal de propagation à l’aide de signaux d’opportunité à large bande.
Introduction et motivations
En effet, la propagation dans le milieu océanique et le mouvement inconnu de la source transforment conjointement les signaux d'événements enregistrés. A partir des concepts élémentaires de propagation des ondes en milieu liquide, nous introduirons les équations qui régissent la propagation acoustique dans l'océan.
Propagation acoustique
- L’´equation des ondes acoustiques
- Les ondes planes
- L’att´enuation des ondes acoustiques
- Propagation du son dans l’oc´ean
Pour ce trajet D, l'onde acoustique quitte le canal de propagation profond et interagit avec le fond marin. Dans le cas de l'interface eau-fond marin, la vitesse de propagation du son dans le deuxième milieu (le fond) est la plupart du temps supérieure à celle du premier milieu (l'eau).
![Table 1.1 : Tableau repr´esentant les coefficients d’absorption de l’eau de mer pour diff´erentes fr´equences [Urick68, Jensen94] et la distance de propagation correspondant ` a une perte par amortissement de − 10 dB, 𝑅 −10𝑑𝐵 .](https://thumb-eu.123doks.com/thumbv2/1bibliocom/466105.71005/23.918.252.646.123.189/tableau-coefficients-absorption-jensen94-propagation-correspondant-amortissement-10𝑑𝐵.webp)
Guide d’onde oc´eanique
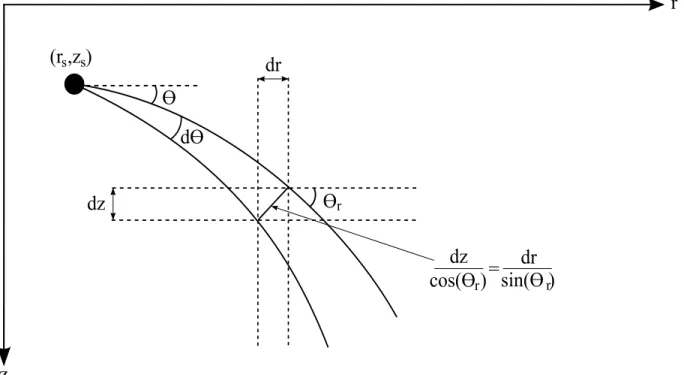
La th´eorie des rayons, d´erivation math´ematique
La phase est obtenue en résolvant l'équation eicon dans le système de coordonnées du faisceau. Nous avons choisi de présenter la méthode de résolution géométrique de l'équation de transport.
L’Op´erateur de propagation acoustique
L'expression de la réponse impulsionnelle de l'environnement est obtenue par transformation de Fourier inverse. L'expression de la réponse impulsionnelle du milieu de propagation obtenue dans la relation (1.72) est une expression modeste.

L’op´erateur de propagation acoustique pour les sources en mouvement
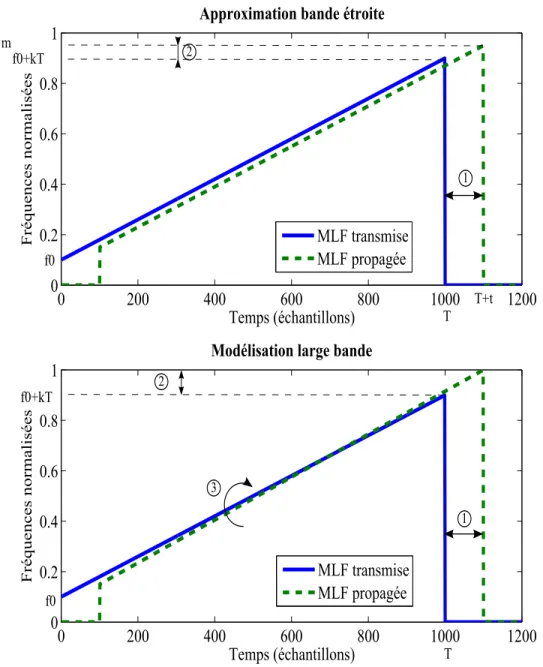
Si l'on considère la modélisation large bande de l'effet Doppler, le signal reçu est une version retardée et compressée du signal transmis. Lors de la transmission d'un signal bande étroite, la modélisation large bande de l'effet Doppler est valable mais doit être utilisée.

Outil de simulation avec une source mobile
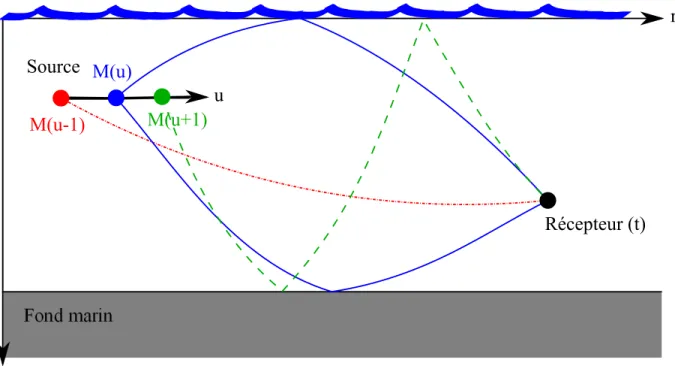
La relation (1.106) signifie que le signal reçu au temps 𝑡 est constitué de la composante issue du faisceau 𝑖 émis au temps 𝑢 de telle sorte que 𝑡=𝑢+𝜏𝑖(𝑢 ). Pour chaque instant 𝑡, le signal reçu est alors calculé comme suit.
Conclusion
La troisième partie de ce chapitre traite de l'équation d'estimation des paramètres du canal de propagation à l'aide de l'estimateur du maximum de vraisemblance. A partir du développement de l'estimateur des moindres carrés et de l'estimateur du maximum de vraisemblance, nous proposons dans la quatrième partie des méthodes et des algorithmes pour estimer les paramètres des canaux de propagation.
L’estimateur des moindres carr´es
Discr´etisation du mod`ele retard-Doppler
La relation (2.1) peut alors être reformulée comme suit : 2.2) Il est possible de représenter les déformations du milieu sous forme de paramètres de transformation discrétisés. Si le support de la transformée de Mellin est 𝛽 ∈ [−𝛽0/2,−𝛽0/2], alors les facteurs de compression Doppler pour la relation (2.2) sont échantillonnés géométriquement comme𝜂=𝜂𝑚0 o `u 𝑚 est un entier et le pas d'échantillonnage est défini de 𝜂0 = 𝑒1/𝛽0 [Jiang06b].
La m´ethode des moindres carr´es
Dans notre exemple, nous connaissons le signal observé 𝑠(𝑡), le signal transmis 𝑒(𝑡) et nous essayons d'estimer la fonction de diffusion à large bande du système 𝜓𝑛,𝑚. Nous obtenons alors une estimation par les moindres carrés de la matrice de diffusion, qui est.
L’estimateur du maximum de vraisemblance
Le maximum de vraisemblance
Le critère de log-vraisemblance ainsi défini devient : 2.20) L’estimation des paramètres 𝜙 en termes de maximum de vraisemblance est notée ˆ𝜙𝑀 𝑉 et vérifiée. Le retard et le facteur de compression Doppler estimés au sens du maximum de vraisemblance sont les paramètres qui maximisent le module de la fonction d'ambiguïté large bande. La maximisation du plan d'ambiguïté à large bande est l'estimateur du maximum de vraisemblance qui permet d'estimer les paramètres souhaités (𝐴, 𝜏, 𝜂) dans le cas d'une propagation simple à trajet unique.
Le plan d’ambigu¨ıt´e
Comme le montre la figure 2.3, il n’y a pas de maximum absolu dans le plan d’ambiguïté à bande étroite. C'est pourquoi le signal reçu est nettement moins ambigu dans le plan d'ambiguïté large bande illustré à la figure 2.3. Cependant, le plan d'ambiguïté large bande a une résolution finie qui dépend des caractéristiques du signal transmis.
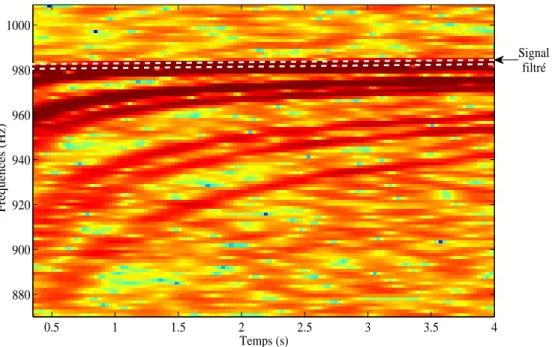
Etude du plan d’ambigu¨ıt´e large bande des MLF
La partie inférieure de la figure 2.2 montre un MLF et sa version propagée simulée avec la modélisation large bande du mouvement. 2 : un décalage de fréquence dû à la modélisation large bande du mouvement, – 3 : un changement du taux de modulation du MLF dû à l'expansion. La fréquence de départ, le taux de modulation et la durée du MLF sont respectivement 𝑓0, 𝑘 et 𝑇.
Algorithmes et m´ethodes d’estimation
L’algorithme de Matching Pursuit Decomposition
Les atomes du dictionnaire sont choisis pour que notre algorithme d'estimation basé sur MPD respecte l'estimation des paramètres au sens de maximum de vraisemblance donné par la relation (2.51). L'algorithme basé sur le MPD permet d'obtenir une caractérisation parcimonieuse du signal observé tout en estimant les paramètres du canal de propagation. C'est pourquoi il est possible d'utiliser un dictionnaire plus finement sélectionné pour estimer les paramètres d'un canal clairsemé au sens du maximum de vraisemblance que pour estimer la fonction de diffusion du canal au sens des moindres carrés.
L’algorithme de Warping Ambiguity Lag-Doppler Filtering
G´en´eralisation de l’utilisation de la WALF ` a un canal non parcimonieux . 80
Le signal reconstruit à partir de l'estimation du canal dépend des temps 𝑡 et de la variable 𝜃 représentant les paramètres du canal de propagation à estimer. MatrixΨ est une matrice de diffusion large bande dont les valeurs sont les coefficients de la fonction de diffusion large bande du canal de propagation. La première étape de la méthode WALF consiste à évaluer les caractéristiques de chaque chemin en termes de maximum de vraisemblance dans le plan d'ambiguïté large bande de la relation (2.28).

Configuration exp´erimentale
La construction de la matrice 퓓𝑖 est la même que la construction de la matrice dictionnaire du canal 퓓 décrite par les expressions (2.12). En utilisant la même méthodologie qu’à la section 2.2, nous obtenons une estimation par les moindres carrés de la matrice de diffusion de groupe 𝑖 avec la relation. Les effets de propagation, tels que l'étalement temporel, peuvent être observés dans une représentation temps-fréquence.
Les algorithmes de MPD et de WALF
Pour illustrer le fonctionnement des algorithmes MPD et WALF, nous détaillerons les résultats obtenus lors de la première itération. La figure 2.8 illustre le signal filtré (partie supérieure) associé au premier chemin et le signal résiduel (partie inférieure) obtenu après la première itération de la méthode WALF. Figure 2.12 : Illustration de la diminution de l'énergie résiduelle du signal en fonction du nombre d'itérations pour les algorithmes MPD et WALF.

Estimation des fonctions de diffusion du canal
La figure 2.13 montre les matrices de diffusion estimées pour les groupes de trajets impairs. Le signal filtré pour chaque groupe de trajets peut être reconstruit à partir de l'estimation de la matrice de diffusion et du signal transmis grâce à la relation (2.86). La fonction de diffusion totale du canal est estimée en additionnant les fonctions de diffusion estimées pour chaque groupe de chemins à partir de la relation (2.90).

Conclusion
La campagne BASE’07
Le deuxième thème de la campagne BASE'07 est l'évaluation environnementale rapide (REA) utilisant l'émission d'ondes acoustiques à large bande. La figure 3.4 schématise l'évolution des positions du réseau d'hydrophones et de la source au cours du temps ainsi que l'évolution de la distance séparant la source du réseau de capteurs. Figure 3.4 : Figures illustrant l'évolution des positions de la source et du réseau d'hydrophones au cours du temps ainsi que l'évolution de la distance séparant la source du réseau de capteurs.

La campagne KAM’08
M´ethodes de compensation du mouvement pour l’estimation de RI
L’approximation grande distance : compensation uniforme du mouvement 108
Ceci explique la dégradation de l'estimation du RI par compensation uniforme du mouvement pour les derniers rayons. La compensation de mouvement uniforme améliore considérablement l'estimation du RI sur chaque hydrophone. La compensation adaptative de mouvement (trait plein) permet d'obtenir une très bonne estimation du RI du canal de propagation.
![Figure 3.1 : Illustration de la zone op´erationnelle d’acquisition des donn´ees de la campagne BASE’07 [Billand07]](https://thumb-eu.123doks.com/thumbv2/1bibliocom/466105.71005/109.918.153.747.130.539/figure-illustration-zone-erationnelle-acquisition-campagne-base-billand07.webp)
Estimation d’un canal de communication
Estimation du canal de communication avec l’algorithme de MPD
Figure 3.19 : Plan d'ambiguïté haut débit pour une MLF enregistrée en mer lors de la campagne KAM'08. La figure 3.19 présente le plan d'ambiguïté à large bande pour un MLF de la campagne KAM'08. Figure 3.21 : Carte d'ambiguïté haut débit d'un signal de communication OFDM enregistré en mer lors de la campagne KAM'08.

Estimation de la fonction de diffusion du canal
L'estimation de la fonction de diffusion globale du canal de propagation est présentée sur la figure 3.25. La fonction de diffusion du canal peut être estimée par deux méthodes différentes. Pour les signaux multi-composantes, nous proposons d'estimer la fonction de diffusion du canal de propagation en utilisant la méthode directe.

Estimation de l’´evolution temporelle des RI
Figure 3.27 : Représentation tridimensionnelle de l'estimation du RI de l'environnement dans la campagne KAM'08 au cours du temps, centrée autour des trois premiers groupes d'arrivées. La figure 3.28 montre une représentation bidimensionnelle de l’IR environnemental estimé au fil du temps. L'évolution des temps d'arrivée contient donc des informations à la fois sur le mouvement de la source et sur l'évolution de l'environnement.

Conclusion
Introduction et enjeux
L’utilisation de sources sonores alternatives pour la tomographie acoustique des océans n’est pas un concept nouveau. Buckingham a initié ce concept en proposant d'utiliser le bruit environnemental pour caractériser le milieu océanique [Buckingham87, Carbone98]. Nous proposons donc de profiter de ces signaux acoustiques présents naturellement dans le milieu océanique pour réaliser des opérations d'inversion géoacoustique à l'aide de sifflets Odontoc`etes.
Pr´esentation de la campagne ERATO’09
Cependant, la méconnaissance du signal émis, de la position et de la vitesse de la source rend l'exploitation de ces signaux d'opportunité particulièrement difficile. Figure 4.3 : Photo du tir du ressort tracté X6 (photo prise par Nicolas Josso). Dans la section suivante, nous proposons d'étudier une nouvelle méthode TOAP, qui utilise des vocalisations enregistrées en champ proche lors de la campagne ERATO'09.

Extraction de l’arriv´ee la plus ´energ´etique
Le filtrage de la première arrivée se divise donc en deux phases. Figure 4.9 : Représentation temps-fréquence du signal reçu après une propagation de 165 mètres dans un environnement simulé proche de l'environnement de la campagne ERATO'09. L'estimation du FI associée au premier trajet correspond bien au signal reçu pour la première arrivée.

L’algorithme de WALF pour la TOAP
La méthode WALF est basée sur le calcul du niveau d'ambiguïté large bande du signal reçu. Classiquement, le niveau d’ambiguïté à large bande du signal reçu 𝑠(𝑡) est calculé comme suit (2.33). Pour TOAP, nous définissons le niveau d’ambiguïté large bande 𝑅TOAP(𝜏, 𝑣) qui suit la relation suivante.

Estimation de la position et de la vitesse de la source d’opportunit´e
Estimation de la position des sources d’opportunit´e
En effet, l’estimation de la position de la source est cruciale pour les opérations d’inversion géoacoustique. L'estimation de la position de la source d'opportunité peut également être utilisée pour les algorithmes de sonar passif. Notre méthode d’estimation de la position de la source est une méthode totalement passive qui fonctionne sur un seul récepteur.

Estimation de la vitesse des sources d’opportunit´e
Le processus d’estimation de la vitesse de la source de plomb peut être décomposé en cinq étapes principales. Le vecteur vitesse potentiel de la source est très bien estimé pour les sources se déplaçant en 1 et 4𝑚𝑠−1. Les résultats de simulation sont très encourageants, tant pour l'estimation de la position que pour l'estimation du vecteur vitesse de la source d'opportunité.

Conclusions
Dans cette thèse, nous nous intéressons principalement à l'estimation de la réponse impulsionnelle du canal. Les méthodes que nous avons proposées permettent d'estimer la réponse impulsionnelle dans le plan d'ambiguïté. Nous avons proposé une méthode pour estimer la réponse impulsionnelle à partir de signaux d'opportunité bioacoustiques enregistrés sur un seul hydrophone.
La m´ethode des sources virtuelles
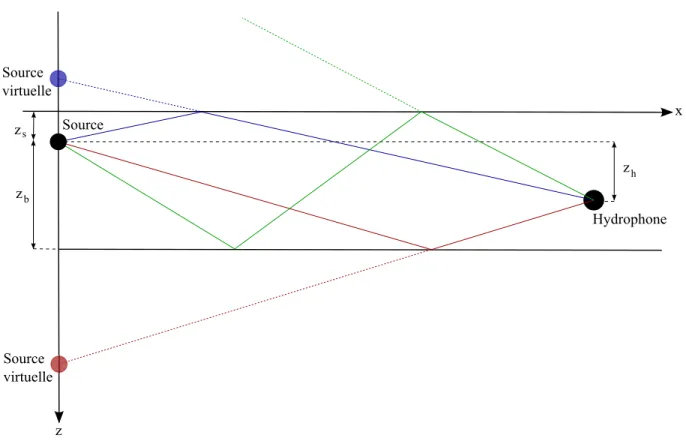
Cette annexe fournit l’expression de la hauteur de l’ensemble des sources virtuelles, 𝑧𝑖, introduite dans la formule (1.81) du chapitre 1. La famille des rayons avec un nombre impair de réflexions est la famille −( 2𝑝+ 1) pour laquelle l’expression car la hauteur des sources virtuelles est. Enfin, la dernière famille de rayons est la famille −2𝑝 qui possède un nombre pair de réflexions et dont l'expression est donnée pour la hauteur des sources virtuelles.
Mod´elisation du mouvement de la source
Les pertes par divergence g´eom´etrique
Les pertes par amortissement
Caract´erisation des chemins de propagation
Interactions aux interfaces
Guide d’onde oc´ eanique
- L’´equation Eikonale
- L’´equation de transport
- Les conditions initiales
- L’op´erateur de propagation acoustique pour les sources en mouvement . 37
![Figure 1.3 : Profils de c´el´erit´e enregistr´e dans l’oc´ean Atlantique durant la campagne BASE’07 [Billand07].](https://thumb-eu.123doks.com/thumbv2/1bibliocom/466105.71005/27.918.183.621.177.487/figure-profils-enregistr-atlantique-durant-campagne-base-billand07.webp)

![Figure 1.6 : Illustration sch´ematique des domaines de validit´e des th´eories de propagation mo- mo-dale et par rayon acoustique illustr´es en fonction de la fr´equence du signal transmis et de la profondeur de la colonne d’eau [Gervaise08a].](https://thumb-eu.123doks.com/thumbv2/1bibliocom/466105.71005/32.918.154.752.117.472/illustration-ematique-domaines-propagation-acoustique-fonction-profondeur-gervaise08a.webp)