ASSISTANCE : Aide à la conduite prenant en compte le trafic, l'état du véhicule et la situation de conduite du conducteur. PPreVent : un autre système d'aide à la conduite pour avertir les usagers de la route (automobilistes mais aussi piétons et cyclistes) d'un accident.
Le transport des personnes
Selon l'Agence internationale de l'énergie, entre les années 2000 et 2030, la croissance annuelle de la demande de transport devrait atteindre 2,4 % pour les véhicules et 2,1 % pour les voies de communication [Billard, 2008]. Avec en moyenne 80 % de population urbaine dans les pays européens, l’avenir est prêt.
Le transport des marchandises
Bilan
Bien que nos véhicules soient de plus en plus sûrs et que la technologie de la circulation ait progressé, le nombre d'accidents sur la route reste important. Un délai pouvant aller jusqu'à trente jours est accordé entre l'accident et le décès de la personne avant que ce décès ne soit pris en compte dans les statistiques des accidents mortels de la route.
Les causes
Dans le cas de notre étude, nous nous intéresserons au rôle que jouent les infrastructures dans la conduite du conducteur sur les routes départementales, routes les plus touchées par un grand nombre d'accidents. Le comportement et le style de conduite du conducteur ne peuvent être quantifiés par un ou plusieurs capteurs.
Méthode
Cet outil doit être aussi discret que possible pour conserver le comportement authentique de chaque conducteur. Cela doit garantir que le conducteur ne soit pas perturbé pour l'étudier dans son environnement et sa manière de conduire habituels.
Critères et contraintes
Les valeurs limites du domaine sont définies par les termes « étendue minimale » et « étendue maximale » ; – la sensibilité : c'est le rapport entre la variation du signal de sortie et la variation correspondante. La fréquence de résonance (ou fréquence propre amortie) est la fréquence à laquelle l'amplitude de la réponse est la plus grande.
La mesure de la trace
La vidéo
Les technologies hybrides : la fusion de données
Son objectif est de fusionner les données de deux radars (un court portée et un autre longue portée), deux caméras (vision stéréo) et un télémètre laser [CARSENSE, 2003]. Le projet Limiteur d'adaptation à la vitesse autorisée (LAVIA) propose un système embarqué qui intègre la combinaison d'un GPS, d'un odomètre et d'un gyromètre et d'une carte numérique de la région dans laquelle il circule.
Bilan de la mesure de la trace
A partir de ces informations, l'ordinateur de bord identifie la position, la limite de vitesse autorisée sur la route et régule automatiquement la vitesse du véhicule [projet LAVIA, 2006]. La localisation dite relative utilise un ou plusieurs capteurs proprioceptifs qui positionnent le véhicule par rapport à une référence initiale.
Les systèmes de capteurs non embarqués
Les capteurs à contact
- Le capteur pneumatique
- Les capteurs de pesée, WIM
- Le capteur résistif
La constante diélectrique des matériaux piézoélectriques varie en fonction de la charge appliquée au matériau [Iaquinta et al., 2004]. Ils sont ainsi utiles dans les phases d'études préliminaires afin de placer au mieux le futur capteur de poids dans la chaussée [Yannis et Antoniou, 2005].
Les capteurs actifs sans contact
- Présentation
- La disposition des capteurs
- Le capteur à infrarouge
- Le capteur à ultrasons
- Le radar : capteur à micro-ondes
Certains capteurs à ultrasons ont une précision de 0,2 mm pour la mesure de distance et de 0,5 km/h pour l'estimation de vitesse [Hexamite, 2006]. Selon la composition du signal émis, l'analyse de son écho peut fournir différentes informations comme la vitesse du véhicule.
Les capteurs passifs sans contact
- Les capteurs passifs à infrarouge
- Les capteurs magnétiques
- Les boucles électromagnétiques
- Le capteur phonique
En combinant deux capteurs, il est possible de mesurer la vitesse avec une précision inférieure à 10. Pour effectuer des mesures de vitesse et de position latérale du véhicule, deux boucles à déplacement latéral sont nécessaires.
Les systèmes de capteurs embarqués
Les capteurs proprioceptifs
- Les capteurs actifs à ondes
- L’odomètre et le tachymètre
- Le gyromètre
- La centrale inertielle
L'odométrie consiste à déterminer la position et la direction d'un véhicule circulant sur un terrain plat. Pour créer une centrale inertielle, des gyroscopes, des accéléromètres (type esclave) et un ordinateur sont intégrés dans un même composant.
Les capteurs extéroceptifs
- Les aimants et le magnétomètre
- Le filoguidage
- L’identification par radiofréquence
- Les balises actives
- Les repères passifs
- L’utilisation d’un modèle
- L’utilisation des téléphones portables
Dans [Plainchault, 2005] il est montré comment utiliser cette technologie dans le domaine de la sécurité routière. La mesure de position est réalisée par trilatération (mesure de distance) ou triangulation (mesure d'angle).

Généralités sur les systèmes d’acquisition
- Définition
- La récupération de l’information
- Les avantages et inconvénients des capteurs à fibre optique
- Les techniques de mesure
- Les réseaux de capteurs optiques
Ce signal traverse un capteur à fibre optique (ou des capteurs en cas de capteurs multiples) qui réfléchit ou diffuse ce signal. À ces avantages s’ajoutent les avantages intrinsèques liés à l’utilisation de fibres optiques, tels qu’une communication bidirectionnelle ou une faible perte de signal (paragraphe A.5).
Le réseau de Bragg
- Le principe
- Le réseau de diffraction
- Du réseau de diffraction au réseau de Bragg
- La fabrication d’un réseau de Bragg
- La réflexion du réseau de Bragg
- Les spécifications d’un réseau
- La modélisation des réseaux
- Le réseau de Bragg comme transducteur
- L’interrogation d’un réseau de Bragg
- Les techniques de séparation des longueurs d’onde en amont 66
- Bilan des techniques d’interrogation d’un réseau de Bragg
Les réseaux de Bragg jouent un rôle majeur dans la séparation des signaux multiplexés en longueur d'onde (codage WDM (Wavelength Division Multiplexing)) en télécommunications [Verneuil, 2003]. D'après 7.4, la longueur d'onde de Bragg dépend de l'indice effectif ainsi que du pas du réseau.
Les capteurs à réseaux de Bragg
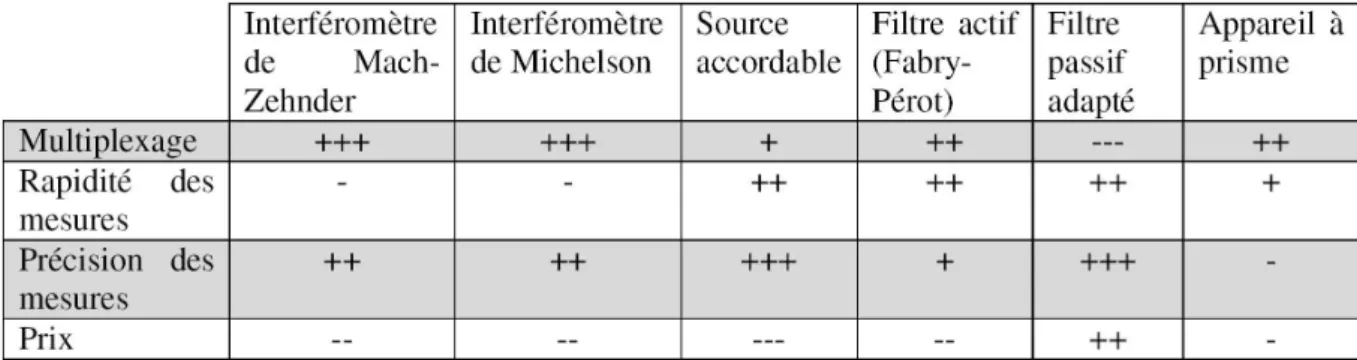
Le tableau ci-dessous contient une comparaison des différentes techniques d'interrogation d'un réseau de Bragg. La sélection de la longueur d'onde est réalisée par des réseaux de Bragg, qui n'ont pas le même pas.
Un capteur à réseaux de Bragg innovant
- Objectifs
- Principe
- La précision sur la mesure
- Le capteur testé
- Le choix de l’interrogation des réseaux
- La construction du capteur
- Les valeurs théoriques attendues
- L’influence du processus d’adjonction de la résine sur les réseaux de
Chaque réseau doit avoir une longueur d'onde de Bragg différente pour identifier la position de la souche. Sensibles à la déformation, les longueurs d'onde des réseaux de Bragg varient également avec la température.
Bilan du capteur à fibres optiques à réseaux de Bragg
Cette tige est placée dans un tube (3 sur la figure 8.1) dont la paroi interne (4 sur la figure 8.1) conduit le courant. La paroi interne (4) entre en contact avec le fil de résistance contenu dans le fil, provoquant un court-circuit d'une partie de la résistance totale.
Le système d’acquisition et de conditionnement
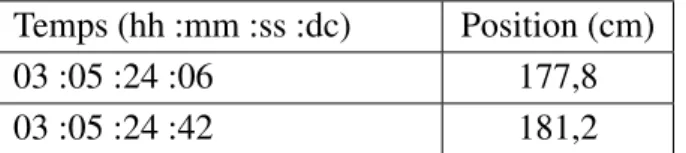
La précision de la mesure de la vitesse d'un véhicule dépend à la fois de la précision du système électronique dans la mesure du temps et de la précision de la mesure de la distance entre deux capteurs. Une estimation de la charge des bus a été réalisée pour s'assurer que les échanges permettraient de collecter toutes les données.
La linéarité du capteur
Sur les capteurs testés, l'erreur liée à l'utilisation de la droite de régression est limitée entre -2,5 et 2,5 cm. Pour les mesures effectuées avec un ohmmètre, l'utilisation de la droite de régression linéaire entraîne une erreur comprise entre -0,67 et 0,46 cm.
La modélisation du capteur
- Présentation
- Les caractéristiques techniques du capteur
- Les caractéristiques du modèle
- La valeur de la résistance
- La valeur de l’inductance
- La valeur de la capacité
- Bilan
- La modélisation par une ligne de transmission à constantes uniformé-
- Le temps de propagation
- Le modèle électrique équivalent
- Bilan
La longueur du filetage dépend de la longueur de la tige filetée et de sa position dans le filetage. FIGURE 8.7 – Présentation de la partie réelle (en haut à gauche), imaginaire (en bas à gauche), absolue (en haut à droite) et angulaire (en bas à droite) du paramètre (1/A) sur un capteur de 3m.

L’influence de la température
- Présentation
- L’influence de la température sur le capteur
- L’influence de la température sur le système d’acquisition seul
- L’influence simultanée de la température sur l’électronique et le capteur 111
A chaque changement, la mesure de la tension maximale de référence du convertisseur est enregistrée (une tension de 2,7 V fournie par une diode Zener). Cette nouvelle expérience permet d'observer l'influence de la température à la fois sur la carte électronique et sur le capteur (figure 8.21).
Bilan du capteur résistif
Cependant, la part de l'influence de la température sur le capteur représente environ 14 % de toutes les variations de température. La résolution du capteur conçu dépend principalement de la résolution du système électronique d’acquisition.
Expérimentation sur la route départementale 961 117
Le conditionnement et l’intégration des capteurs dans la chaussée
- Le conditionnement des capteurs optiques
- Le conditionnement des capteurs résistifs
- L’installation des capteurs dans la chaussée
Le principe de conditionnement de ces capteurs s'inspire de capteurs externes placés sur la route, comme des boucles électromagnétiques ou des capteurs piézoélectriques. L'ensemble est donc facilement transportable et prêt à être mis en route.
Schéma général des expérimentations
Les véhicules de test
Comme présenté dans la section 7.4.7, page 76, nous nous intéressons aux variations des longueurs d'onde de Bragg. Cela nécessite de considérer une situation initiale permettant d'établir le réseau de longueurs d'onde de Bragg sans sollicitations extérieures, puis d'observer l'évolution de ces variations lorsqu'une sollicitation statique ou dynamique apparaît.
Les mesures statiques
- Acquisition des longueurs d’onde de référence
- Le véhicule à l’arrêt sur le CFO n°1
- Les remarques sur cette première expérience
- Le véhicule à l’arrêt sur le CFO n°2
- Bilan
Connaissant la longueur d'onde et le nombre de fibres optiques interrogées, la tension peut alors être localisée physiquement sur le capteur. Des tests ont été réalisés en changeant l'extrémité de la fibre optique pour obtenir des mesures des longueurs d'onde des différents réseaux de Bragg.
Les mesures en dynamique à faible vitesse
FIGURE 10.5 - Aperçu de la variation de la longueur d'onde centrale de Bragg au CFO 2 d'une voiture circulant à faible vitesse (marche avant, arrière, marche avant) en fonction de sa position le long du capteur, avec la lecture réelle à gauche et la traînée lecture à droite changement de référence. La représentation 3D, figure 10.7, de la longueur d'onde de mesure en fonction de la position sur le capteur et du temps ne révèle rien de très important sur le papier.
Les effets du passage du camion de référence du LRPC sur les CFO
- Les effets du passage du camion sur les capteurs suivant des positions
- Les effets de l’essieu avant sur le capteur optique
- Les effets de l’essieu arrière sur le capteur optique
- Bilan
- Les effets du passage du camion en fonction de la vitesse
- Les effets de l’essieu avant sur le capteur optique
- Les effets de l’essieu arrière sur le capteur optique
- Bilan
La mesure de bande passante est effectuée lorsque les variations des longueurs d'onde de Bragg sont supérieures à 0,2 nm. FIGURE 10.20 – Passage 1 – Image de la vidéo montrant l'essieu arrière sur le capteur à fibre optique.

Bilan
La figure 11.3 représente les valeurs enregistrées par le système d'acquisition sans faire la moyenne des valeurs. FIGURE 11.4 – Acquisition lorsque la voiture d'essai passe le capteur à 35 km/h avec un oscilloscope numérique.
Influence de l’angle d’attaque sur le capteur
Dès que le pneu n'est plus en contact avec le capteur, la position revient à sa valeur de repos, sauf s'il y a un angle d'inclinaison du capteur. Pour cette voiture, à partir de l'angle d'inclinaison du capteur de 8,8°, le pneu droit ne se confond plus avec le pneu gauche.
L’expérimentation sur une route départementale
- Les tests préalables
- Le recueil des données
- Les résultats
Le système électronique installé en bord de piste, le pneu avant droit est le pneu le plus proche de l'origine du capteur, soit la position 0. Par rapport au revêtement de la route, ce dernier n'est pas placé partout à la même hauteur.

Le capteur résistif amélioré
De plus, placer le capteur à quelques millimètres au-dessus de la surface de la route crée du bruit lors du passage des véhicules. Un exemple de signature d'un camion à quatre essieux sur le capteur 22, une semaine après l'installation de la deuxième version, est présenté sur la figure 11.10, Tech = 0,7 ms.

Bilan
Le capteur résistif fournit une position latérale du côté passager du véhicule par rapport au bord de la chaussée. Leur disposition est conçue pour observer une déviation de la piste d'un centimètre maximum.

Propriétés de la fibre
- L’atténuation
- La dispersion chromatique
- La dispersion de polarisation
C'est la somme de l'atténuation de la fibre due au matériau qui constitue le guide et du retard obtenu grâce à la vitesse du groupe. L'effet Raman provient d'une interaction photon-phonon, c'est-à-dire un échange d'énergie entre l'onde optique et les vibrations du matériau.
Les différents connecteurs
- Les propriétés physiques
- Les propriétés optiques
- Les pertes par insertion
- Les pertes par réflexion
L’impact de la non linéarité de la fibre
Les avantages et les inconvénients de la fibre
Actuellement, les systèmes électroniques d'acquisition ne permettent pas de distinguer les différentes longueurs d'onde d'un signal optique. Distinguer les variations de ces longueurs d'onde est essentiel pour connaître celle de la mesure.
Les appareils à prisme
Cependant, ces cellules renvoient une intensité qui ne permet alors pas le calcul de la longueur d'onde (en effet, selon Louis De Broglie, l'intensité de l'onde mesure la probabilité de présence de photons [Grécias et Migeon, 1999]). Dans le contexte des capteurs à réseau de Bragg, les informations sont facilement obtenues en mesurant les longueurs d'onde de Bragg.
Les filtres passifs
Les appareils interférentiels
Les filtres actifs
Les réseaux de diffraction
Vues d’ensemble de graphiques complémentaires suite au passage du camion
Quelques mesures obtenues par l’action de l’essieu avant du camion de réfé-
Quelques mesures obtenues par l’action de l’essieu arrière du camion de réfé-
Les revues
Les conférences avec Actes
Les communications orales
- Les affiches
- Les séminaires