Lista de Tabelas
Motivação da Pesquisa
Critérios como segurança, confiabilidade e estabilidade são comumente usados no projeto desse tipo de estrutura de controle. A implementação desse tipo de estrutura de controle de parâmetro fixo é feita usando técnicas de discretização e emulação em sistemas digitais altamente confiáveis, como controladores lógicos programáveis (PLCs). Devido à natureza não linear dos sistemas de potência, as estratégias de controle de parâmetros fixos têm dificuldade em exibir um bom desempenho uniforme em todas as condições operacionais.
Model Based Predictive Controller - MBPC
Ele usou um modelo linear de resposta impulsiva finita (FIR), uma função de custo quadrática e restrições de entrada e saída manipuladas de maneira ad hoc. Em 1979 e 1980, Cutler e Ramaker propuseram o Dynamic Matrix Controller (DMC), um algoritmo aplicável a sistemas multivariáveis, com restrições também tratadas de forma não sistemática, e que utilizava modelos de resposta degrau. Uma extensão do método DMC que considerou restrições explícitas nos sinais e estados de entrada e saída usando técnicas de programação quadrática para resolver exatamente o problema de otimização resultante deu origem ao algoritmo Quadrática Dynamic Matrix Control (QDMC), proposto por Cutler et al.
Generalized Predictive Control - GPC
Uma descrição detalhada do GPC usando um modelo de espaço de estados pode ser encontrada em Ordys e Clarke (1993) e posteriormente em Salcedo et al. Uma descrição de uma formulação unificada de controlador GPC e Linear Quadrático Gaussiano (LQG) baseada em representações de espaço de estados de modelos ARMAX pode ser encontrada em Blachuta (1996). Uma formulação alternativa de GPC baseada em controle ótimo usando modelos de espaço de estado também pode ser encontrada em Bitmead et al.
Estratégias de Controle Avançadas aplicadas à SEP
Os resultados simulados apresentados demonstram a viabilidade do uso de modelos de predição não linear do tipo TS em conjunto com técnicas de controle preditivo do tipo GPC. Em 1994, Zachariah propôs o uso de controle adaptativo autoajustável aplicado ao controle de tensão e velocidade de um sistema de potência real em escala reduzida. A implementação do controle suplementar com ESP para melhorar a estabilidade com GMV foi apresentada em Lim e Hiyama, (1990) e Gu e Bollinger (1989) para o caso SISO (Single-Input Single-Output) e em Pahalawathatha et al.
Contribuições da Tese
O esquema de controle não adaptativo com parâmetros fixos utiliza duas técnicas de projeto: a) GPC em formulações monovariáveis e multivariáveis (Camacho e Bordons). A Tabela 1.2 resume as estratégias de controle a serem avaliadas para o exemplo de formulação SISO. Nesse contexto, uma das principais contribuições deste trabalho é de natureza prática, pois a avaliação do desempenho das estratégias de controle digital preditivo avançado propostas será realizada por meio de testes em um sistema de potência real e escala reduzida.

Organização da tese
Apêndice L – Comportamento gráfico dos coeficientes matriciais F~i e G~i segundo a estimação ESPRML_AP_MIMO, descrito no Capítulo 4;. Apêndice M – Comportamento gráfico dos coeficientes de ganho linear da matriz K, (ki), segundo a estimação ESPRML_GPC_MIMO, descrita no Capítulo 4;. Apêndice N – Comportamento gráfico dos coeficientes matriciais F~i e G~i segundo a estimação ESPRCL_AP_MIMO, descrito no Capítulo 4;.
Estabilidade de Sistemas Elétricos de Potência
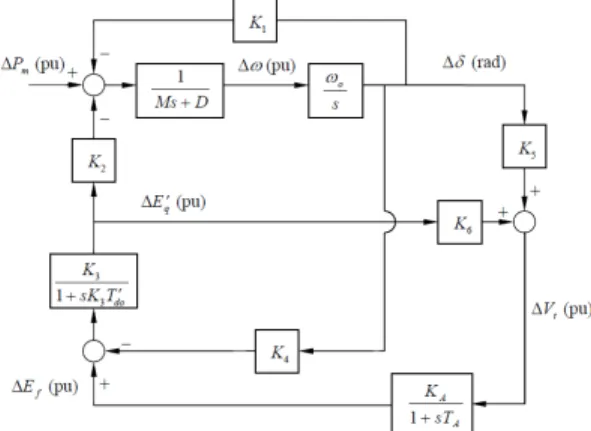
Estabilizador de Sistemas de Potência
Os três sinais que normalmente podem ser usados como entrada para o ESP são: desvio de velocidade do eixo do rotor, potência elétrica e desvio de frequência. Nesta tese, para o caso dos MIMO ESPs propostos, serão utilizados como sinais de entrada o desvio de velocidade e o desvio de potência elétrica ativa. No caso de estratégias SISO, apenas o sinal de desvio de energia elétrica ativo será usado como sinal de entrada do ESP.
Simulação da Dinâmica de Sistemas Elétricos de Potência
A Tabela 2.1 apresenta as principais características do simulador de sistema de potência desenvolvido com técnicas de controle preditivo baseadas em modelos paramétricos (PowerSim_PredC_Id). Permite o desenvolvimento de sistemas de controle com técnicas de atribuição de pólos monovariáveis e multivariáveis usando variáveis de loop de tensão e velocidade. Esse recurso permite o projeto de sistemas de controle não lineares usando técnicas de modelagem do tipo RML para descrever o comportamento não linear global do SEP.

Introdução
Esses dois termos correspondem à resposta livre do processo obtida considerando o sinal de controle constante. Considerando que o sinal de controle permanecerá constante após os primeiros sinais de controle N3, as previsões do sinal de saída incluídas no custo da equação 3.68) podem ser reescritas da seguinte forma: 3.68) dá a sequência dos sinais de controle. No tempo (k+1) um novo problema de minimização é resolvido e novamente apenas o primeiro elemento do vetor de sinais de controle é aplicado ao sistema.
Portanto, a lei de controle pode ser expressa pelo produto de um ganho linear matricial K pelo erro entre as previsões do sinal de referência e as previsões da resposta livre do modelo da Eq. A principal vantagem desse tipo de controlador é a capacidade de alterar rapidamente os parâmetros de controle em resposta a mudanças no ponto de operação do sistema. O principal desafio dessa estratégia de controle é determinar o mecanismo de ajuste para satisfazer os critérios de estabilidade.
No controle adaptativo do tipo auto-adaptativo, utiliza-se uma técnica de estimação para obter, em tempo real, os parâmetros do modelo do processo controlado e, com o auxílio dessas informações, formula-se uma lei de controle a partir de um método de dimensionamento adequado . O esquema de controle adaptativo autoajustável apresentado na Seção 3.4.3 utiliza um modelo linear discreto do sistema controlado obtido em tempo real por um método de identificação recursivo, como o ERMQ apresentado na Seção 3.2.2. Com base neste modelo identificado, a lei de controle é formulada usando um método adequado, como por exemplo a atribuição de pólos apresentada na Seção 3.3.
O projeto de um controlador local começa com a escolha de uma técnica de controle digital adequada para o problema que está sendo analisado.
Introdução
A Tabela 4.3 apresenta uma comparação entre os polos do modelo SISO utilizado na Eq. 4.1), as características de seu modo oscilatório dominante e o modo oscilatório representado pelos autovalores sϕ~(0). Na Tabela 4.7 a comparação entre os polos dominantes do modelo ARX MIMO identificado da Eq. 4.4) e o modo oscilatório dominante representado por sϕ~(0) apresentado. A estratégia de controle ESPF_AP_SISO usa o modelo de 3ª ordem da Eq. 4.1), estimado pelo procedimento não recursivo descrito na Seção 4.2.1, para sintetizar uma lei de controle estabilizadora.
Vesp E, obtido resolvendo a equação 4.17), é adicionado à referência para o sistema de regulação de tensão do gerador síncrono. Os coeficientes polinomiais da matriz Ai e Bi são obtidos a partir do modelo MIMO de 3ª ordem da Eq. Na Tabela 4.12 é apresentada uma comparação entre o modo de oscilação dominante presente no modelo CARMA MIMO da Equação 4.25), identificado nesta seção, e o modo de oscilação do sistema MSBI, representado pelos autovalores sϕ~(0).
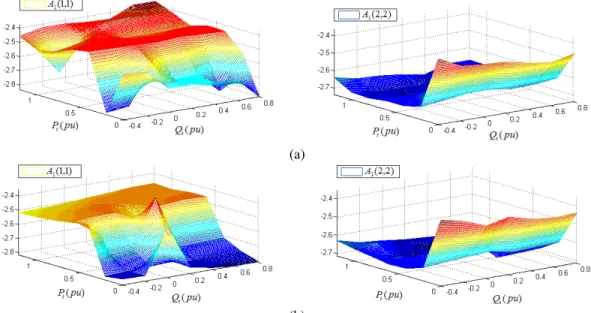
96 As Figuras 4.14 e 4.15 mostram o comportamento dos coeficientes de matriz A1 e B1 do modelo ARX331 MIMO da Eq. 4.4) estimado por RML em função do estado operacional do sistema MSBI. Nas Figuras J.1 e J.2, disponíveis no Anexo J, o comportamento dos demais coeficientes da matriz Ai e Bi do modelo ARX331 MIMO da Eq. 4.4) estimado por RML em função do estado operacional do sistema MSBI. apresentado. 105 As Tabelas 4.18 e 4.19 apresentam os modos oscilatórios dominantes estimados por RML usando o modelo Eq com um e dois circuitos ativos de transmissão, respectivamente.
As Figuras 4.18 e 4.19 mostram o comportamento dos coeficientes da matriz dos polinômios A1 e B0 do modelo CARMA MIMO 331 da equação 4.25) estimados por RML em função do estado operacional quando se utiliza um ou dois circuitos de transmissão ativos. Na etapa de identificação, o MIMO RML descrito na Seção 4.5.2 é usado para estimar os coeficientes da matriz do modelo de processo. Na etapa de identificação, o MIMO RML descrito na Seção 4.5.3 é usado para estimar os coeficientes da matriz do modelo de processo.

Passo 4: Calcular o vetor
ESPRCL_AP_MIMO - usa o algoritmo AP_MIMO descrito na Seção 3.3.2 e os modelos locais ARX MIMO RML MIMO de 3ª ordem descritos na Seção 4.5.2 para formar um conjunto de controladores RCL locais; ESPRCL_GPC_MIMO - usa o algoritmo de posição GPC MIMO descrito na Seção 3.3.4 e os modelos CARMA MIMO RML MIMO locais de 3ª ordem descritos na Seção 4.5.3 para projetar um conjunto de controladores RCL locais; Para a estratégia de controle ESPRCL_AP_MIMO, o conjunto de 98 modelos ARX MIMO locais de 3ª ordem da Eq.
O conjunto de 98 controladores locais assim obtidos constitui o RCL utilizado na estratégia de controle ESPRCL_AP_MIMO. F em função do estado operacional ϕ~(k), segundo estimativas ESPRCL_AP_MIMO, para um e dois circuitos de transmissão ativos. As Figuras N.1 e N.2, disponíveis no Anexo N, apresentam as estimativas dos demais coeficientes da matriz G~i e F~i em função da condição operacional ϕ~(k), estimada por ESPRCL_AP_MIMO, para um e dois circuitos de transmissão ativa.
Na Figura N.3, disponível no Anexo N, é apresentado o comportamento dos parâmetros ξd, α, ωn e Kξ em função do estado operacional ϕ~(k), determinado no projeto ESPRCL_AP_MIMO. b) Figura 4.26 – Estimativas do coeficiente de matriz ~0. G de ESPRCL_AP_MIMO em função do estado operacional ϕ~(k): a) para circuito de transmissão ativo; b) Para dois circuitos de transmissão ativos. b) Figura 4.27 – Estimativas do coeficiente de matriz ~1. F de ESPRCL_AP_MIMO dependendo das condições de operação ϕ~(k)a) Para circuito de transmissão ativo; b) Para dois circuitos de transmissão ativos.
A Figura 4.29 mostra um diagrama de blocos representando a operação da estrutura de controle ESPRCL_AP_MIMO.

Utilizar a RML descrita na Seção 4.5.3 para estimar os coeficientes matriciais )
Na tabela 4.26 são apresentados os valores dos índices de desempenho obtidos no teste 1 para cada estratégia de controle avaliada. Na Figura 4.35 são apresentadas as respostas obtidas no Teste 1 utilizando as estratégias de controle ESPRML_AP_MIMO (descritas na Seção 4.5.4) e ESPRCL_AP_MIMO (descritas na Seção 4.6.2). Na Figura 4.36 são apresentadas as respostas obtidas no Teste 1 utilizando as estratégias de controle ESPRML_GPC_MIMO (descritas na Seção 4.5.5) e ESPRCL_GPC_MIMO.
140 A Figura 4.37 mostra uma comparação das respostas obtidas no teste 1 para o sinal de potência operacional Pt com todas as 8 estratégias de controle avaliadas. A Tabela 4.27 apresenta os valores dos índices de desempenho obtidos no teste 2 para cada estratégia de controle avaliada. A Figura 4.43 mostra uma comparação das respostas obtidas no teste 2 para o sinal de potência operacional Pt com todas as 8 estratégias de controle avaliadas.
A Tabela 4.28 apresenta os valores dos índices de desempenho obtidos no teste 3 para cada estratégia de controle avaliada. 154 A resposta obtida no teste 3 com ESPs multivariáveis com parâmetros fixos ESPF_AP_MIMO e ESPF_GPC_MIMO é mostrada na Figura 4.46. A análise do comportamento de ESPF_AP_MIMO durante o teste revela que na malha de excitação o sinal de controle satura após a aplicação da primeira perturbação.
Após a aplicação da primeira perturbação na referência de potência mecânica, ocorre um baixo overshoot na variável Pt e saturação do sinal de controle aplicado ao circuito de excitação do gerador quando são utilizados os controladores ESPRCL_AP_MIMO e ESPRML_AP_MIMO, como pode ser visto na Figura 4.47. A Figura 4.49 mostra a comparação das respostas obtidas no teste 3 para o sinal de potência ativa, Pt, com todas as 8 estratégias de controle avaliadas. A Figura 4.55 mostra a comparação das respostas obtidas no teste 4 para o sinal de potência ativa, Pt, com todas as 8 estratégias de controle avaliadas.