Projeto e implementação de um sistema de controle numérico computacional: Trajetórias suaves através de restrições instantâneas / Paulo Augusto Sherring da Rocha Junior. Projeto e Implementação de um Sistema de Controle Numérico Computacional: Trajetórias Suaves Através de Restrições Instantâneas.
Justificativa
A programação de peças geralmente resulta em maior custo por peça devido à produção reduzida de peças. Interpretador, que tem a função de ler a programação da peça e armazenar os blocos na memória.

Objetivos
Este elemento tem dois requisitos principais: bom desempenho em tempo real, caso contrário, a possibilidade de erros de rastreamento de trajetória torna-se iminente; geração de trajetórias suaves, que possibilita o amortecimento de vibrações indesejadas e proporciona maior confiabilidade na operação por meio de uma operação que respeita os limites do sistema mecânico da máquina. Desde então, estabeleceu-se um interesse constante na busca de melhores técnicas para geração de trajetórias de referência de posição.
Contribuições
Organização desta Tese
No capítulo 4, será apresentada a técnica proposta para geração de trajetórias em três dimensões com limites atensnap. Neste capítulo, será explorada a literatura existente sobre técnicas de geração de trajetórias, bem como diferentes abordagens para sua implementação e, por fim, será feita uma contextualização da metodologia e abordagem proposta nesta tese com trabalhos desenvolvidos anteriormente.
Técnicas para Geração de Trajetórias
Na literatura, as técnicas de mistura de caminhos são altamente dependentes do algoritmo de controle. Desta forma, a mistura de trajetórias deve ser desenvolvida em paralelo e de forma coordenada com o algoritmo de geração de trajetórias.
Revisão em Aspectos de Implementação
Contextualização da Técnica Desenvolvida
Com o objetivo de aumentar a viabilidade econômica e aplicabilidade do método proposto, neste trabalho optou-se pela utilização de sistemas embarcados.
Conclusão
Quantidades menores de ordem podem ser obtidas integrando numericamente ou algebricamente o perfil ao longo do tempo. Algoritmicamente, todas as técnicas seguem a estrutura descrita na Figura 2: i) iniciar com a restrição de ordem mais alta, computando o perfil que realiza todo o deslocamento, ignorando as restrições de ordem mais baixa; ii) são testados os valores máximos obtidos para a trajetória, para cada uma das restrições de ordem inferior, recalculando quando necessário; iii) continue com a próxima restrição de pedido imediatamente abaixo e repita a etapa i) para a quantidade de pedido menor.
Algoritmo Trapezoidal
A posição ao longo do tempo pode ser obtida a partir da dupla integração do perfil de aceleração.
Algoritmo de Sete Segmentos
Algoritmo de Quinze Segmentos
Embora não explicitamente visível na Figura 5, também existe uma correlação inversa entre o tempo de ciclo e o valor limite de um determinado tamanho, ou seja, reduzir o valor máximo permitido para um determinado tamanho tende a aumentar o tempo de aumento para realizar o movimento. A Figura 6 apresenta o espectro de frequência de aceleração para cada um dos perfis ilustrados na Figura 5. Uma diferença mais suave, mas ainda significativa, entre os espectros de frequência resultantes dos métodos de sete e quinze segmentos também pode ser observada.
Em espectros de frequência como os mostrados na Figura 6, uma banda de frequência maior representa um estímulo com conteúdo espectral mais variado, o que muitas vezes é indesejável.
Conclusão
Os comandos de movimento mais comumente usados são movimentos lineares e circulares envolvendo múltiplos eixos. Portanto, o planejamento de rotas para cada comando deve levar em consideração as restrições individuais de cada um dos componentes em execução. Além disso, as limitações gerais da máquina e as especificidades de cada comando de movimento também devem ser levadas em consideração.
Neste capítulo, a implementação desses tipos de movimentos será explorada considerando restrições até a quarta derivada da posição em relação ao tempo.
Deslocamento Linear
Isso garante que cada uma das restrições seja respeitada para cada eixo dado qualquer movimento linear, −→p = (px,py,pz). Após esses testes, restam duas etapas: o cálculo da trajetória para um eixo principal; e calculando a trajetória dos demais eixos. Consequentemente, obtêm-se valores para td, tj, ta, tv e para o sono de referência, ¯dnew, onde i é o eixo maior escolhido.
Para os demais eixos é calculada uma referência rápida, utilizando os períodos calculados para o eixo principal.
Deslocamento Circular
Se o valor resultante de denap for maior que seu limite, setd é recalculado resolvendo a Equação (4.23) para td, enquanto retém sua menor raiz real. O valor máximo da velocidade resultante do perfil de corrente é calculado, dado por ˆv= d¯θr(2td3+3td2tj+tdt2j). Se o valor resultante de denap for maior que sua restrição, recalcule setj como uma solução para a Equação (4.38), mantendo sua menor raiz real positiva.
Se o na resultante violar sua restrição, recalcule-o como uma solução da equação (4.47) enquanto retém sua menor raiz real positiva.
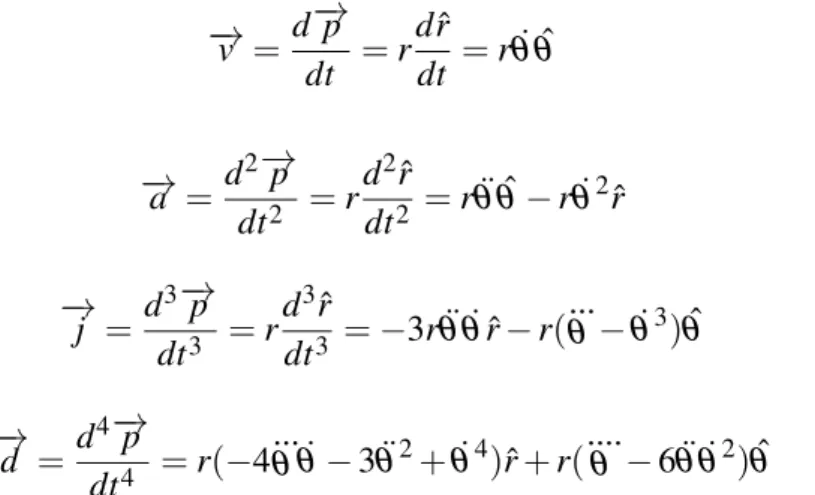
Equações de Posição por Integração Algébrica
Além disso, nos testes realizados, observou-se que a integração numérica funciona bem apenas para trajetórias simétricas. Este efeito é atribuído ao erro numérico realizado durante a integração numérica: no caso simétrico, são feitas somas iguais, para mais e para menos, para que a contribuição líquida dos erros se anule. No caso de trajetórias assimétricas, aquelas com acelerações e desacelerações diferentes, por exemplo, esses erros não mais se anulam e o efeito cumulativo natural da integração numérica resulta em valores diferentes dos calculados e esperados.
Buscando desenvolver uma estrutura mais flexível, equações integradas algebricamente foram escolhidas neste trabalho, resultando em um conjunto relativamente extenso de equações que descrevem o solavanco, aceleração, velocidade e posição em qualquer momento da trajetória, independentemente da taxa de amostragem.
Mescla de Trajetórias
A relação entre o desvio máximo e o comprimento de mistura depende fortemente dos parâmetros dos comandos de movimento envolvidos, ou seja, o comprimento do deslocamento e as restrições impostas. Para cada um deles, pode ser aplicado um método iterativo, recalculando assim um novo valor debw que respeite simultaneamente todas as restrições impostas. A Figura 10 ilustra a relação entre bw e o valor máximo alcançado para cada uma das grandezas físicas, resultante do acoplamento de dois comandos de movimento consecutivos.
A uma taxa de amostragem de Ts=1ms, bw=222 se traduz em um atraso de 0,222s para um único par de comandos de movimento.

Conclusão
Após a velocidade, testa-se a aceleração, ainda em bw=370, também representada por uma linha preta no gráfico de aceleração versus bw, obtendo-se um valor acima do limite de 100 mm/s2. Em seguida, é realizada uma busca da derivada, no sentido descendente, até que por volta de debw=250, a derivada da função resultante pára em torno de 0, impedindo que a busca continue para encontrar o menor valor de debw. Este valor é utilizado para verificar o curso máximo resultante da mistura, sendo avaliado como um valor ligeiramente acima do limite.
Este capítulo apresenta os detalhes de implementação de cada um desses elementos, incluindo: apresentação da instalação eletromecânica, aspectos eletrônicos, aspectos do software embarcado da solução proposta e uma breve apresentação do software de interface com o usuário.
Planta Eletromecânica
Foram utilizados três motores de passo no formato Nema 23, com torque nominal de 1,86 N.m e corrente nominal de 2,38 A. Para medir os sinais de posição, foi utilizado um par de encoders rotativos, conectados ao eixo traseiro dos motores de passo. O movimento translacional é a posição mecânica da máquina, gerada a partir da posição angular do motor de passo.
Todos os elementos apresentados acima são destacados: os eixos cartesianos individuais, motores de passo, encoders, atuadores, fusos e guias lineares.

Aspectos Eletrônicos
As entradas digitais com filtro de primeira ordem podem ser usadas para conectar sondas de posição, interruptores de limite e um botão de emergência. As seis entradas digitais do codificador podem ser usadas para ler os codificadores, se presentes, ou podem ser configuradas como entradas digitais de uso geral. Foi necessário utilizar um dispositivo tri-state para evitar que as entradas digitais do microprocessador fossem acionadas logicamente durante a inicialização do processador, pois algumas portas digitais podem ser utilizadas para configurar o processo de inicialização.
Para as entradas digitais de uso geral, um circuito de filtro forçado foi usado conforme mostrado na Figura 16.
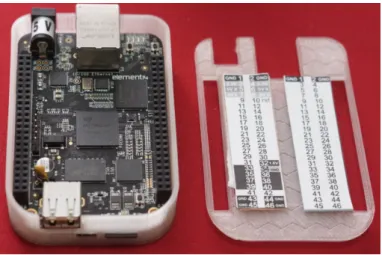
Aspectos do Software Embarcado
Originalmente desenvolvido para aplicações de comunicação, é um processador RISC de 200 MHz que compartilha espaço de memória com o processador principal: ambos compartilham o cache L4 (INSTRUMENTS, 2014). Este espaço de memória pode ter quatro estados: buffer free (bufferState = 0); gravação de buffer (bufferState = 1); buffer pronto(bufferState = 2); buffer ocupado (bufferState = 3). O controle ocorre da seguinte forma: o thread de controle processa o comando atual e, em seguida, marca o primeiro espaço de memória disponível como um buffer no processo de gravação (bufferState = 1), que então grava o CommandType (uchar cmdType ) e o corpo do comando (uchar cmd[ 14]) campos. .
Este monitora o espaço de memória ativo até encontrar o estado de buffer pronto (bufferState = 2), a partir do qual começa a processar o comando e marca o buffer de estado em processo (bufferState = 3).

O Software de Interface
Como pode ser visto, a abordagem utilizada deixa espaço para a implementação de novas funcionalidades, um conceito muito importante no design de produtos. A Figura 24 mostra a aplicação gráfica em execução, onde é possível visualizar os diversos botões e elementos gráficos para interação com o sistema embarcado.
Conclusão
Dois testes foram realizados: análise de trajetórias mistas para diversos parâmetros e análise do algoritmo de geração de trajetórias limitadas emsnap. O algoritmo proposto, assim como os outros dois, foi implementado no mesmo framework, apresentado no Capítulo 5, para garantir que os três resultados estejam sujeitos às mesmas restrições computacionais visando resultados imparciais.
Algoritmo de Mescla de Trajetórias
Esse comportamento também é esperado, uma vez que a mistura serve ao propósito de obter menos flutuações de velocidade de avanço na interseção de dois segmentos de movimento. A duração final da trajetória também variou de acordo com a tolerância imposta, pois a trajetória percorrida é menos suscetível a paradas para valores de tolerância maiores. Nesse sentido, a economia de tempo obtida representa 69% do menor valor possível, que só pode ser obtido se nenhuma outra restrição for considerada.
A Tabela 1 mostra as velocidades mínimas observadas para cada valor de tolerância, a distância mínima registrada entre a trajetória resultante e o ponto de interseção e o tempo de ciclo.

Resultados Experimentais
A Figura 28 detalha os perfis resultantes de velocidade, aceleração e empuxo obtidos usando cada um dos três algoritmos de planejamento de caminho. Para a aceleração axial apresentada na Fig. 28(d-e), o algoritmo de sete segmentos e o algoritmo proposto resultaram em trajetórias estreitamente limitadas que permaneceram abaixo do limite de 1500 mm/s2 em todos os momentos. Finalmente, a Figura 28 (h-i) mostra o perfil denaprestent para cada eixo, que permanece abaixo do valor limite de 60.000 mm/s4 durante todo o movimento.
A aceleração axial, representada na Figura 31(d-e), os métodos de sete segmentos e o proposto ficaram estritamente abaixo do valor limite de 1500 mm/s2.

Conclusão
Quanto à trajetória da borboleta, o método proposto resultou em uma redução do erro RMS em 2% e 26,5% em relação aos métodos de sete segmentos e trapezoidal, respectivamente. Considerando a trajetória do bolsão quadrado, o método proposto reduziu a área de erro em 24% e 80% nas regiões de canto em comparação com os métodos de sete segmentos e trapezoidal, respectivamente. O método proposto produziu um erro RMS 8,2% menor em comparação com o método de sete segmentos e 22% menor em comparação com o método trapezoidal.
Comparando o método proposto com o método de sete segmentos, os tempos de ciclo foram maiores para as caixas borboleta e caixa quadrada, respectivamente.
Propostas de Trabalhos Futuros
Interpolation of parametric CNC machining path under limited impact force. International Journal of Advanced Manufacturing Technology, v. A Minimal Feed Fluctuation NURBS Interpolation Method for CNC Machine Tools. International Journal of Advanced Manufacturing Technology, v. Kinematic corner smoothing for high speed machine tools. International Journal of Machine Tools and Manufacture, Elsevier, v.
Analytical local corner smoothing algorithm for five-axis CNC machining. International Journal of Machine Tools and Manufacture, Elsevier Ltd, v.
Este apêndice fornece um conjunto completo de equações algébricas, em um total de 16 equações, para cada quantidade física do algoritmo de 15 segmentos, composto por oito seções de jerk constante, quatro seções de jerk constante, duas seções de aceleração constante e uma de velocidade constante. Cada subseção aqui apresentada apresenta uma física a priori sobre o tempo: posição, velocidade, aceleração adequada. É importante observar que vários termos ao longo dessas equações são independentes do tempo e podem ser calculados uma vez a priori.
Digrama Esquemático
Roteamento