MÉTODO NÃO LINEAR DE MÍNIMOS QUADRADOS PARA USO EM SOFTWARE JAVA PARA POSICIONAMENTO ÓTIMO DE WLANS. Método dos Mínimos Quadrados Não Lineares para Uso em Software Java para Posicionamento Ótimo de WLAN`S/Jeanne de Oliveira Pereira; orientador, Hermínio Simões Gomes.-2017. Para otimizar os serviços deste tipo de comunicação, por vezes são utilizados modelos empíricos, que requerem o cálculo de parâmetros através de métodos de otimização, como o ajuste de mínimos quadrados não lineares.
O método Levenberg-Marquardt é abordado na versão irrestrita e também com restrições do tipo caixa, incluindo resolução de sistemas de equações não lineares. Finalmente, Levenberg-Marquardt com restrições do tipo caixa foi implementado em software Java para posicionamento ideal de WLANs para maximizar a cobertura do sinal. PALAVRAS-CHAVE: Mínimos Quadrados Lineares, Regressão Linear, Mínimos Quadrados Não Lineares, Gauss-Newton, Levenberg-Marquardt, Java, WLAN.
MQL Mínimos Quadrados Lineares MQNL Mínimos Quadrados Não Lineares MMQL Método dos Mínimos Quadrados Lineares MMQNL Método dos Mínimos Quadrados Não Lineares.
Objetivos
Recentemente tem havido um grande interesse e crescimento nas redes WLAN (Wireless LAN), para transmissão de dados de Internet em ambientes indoor, o que exige uma necessidade de eficiência e bom desempenho no serviço. Vale a pena realizar estudos sobre como o sinal de rádio de uma transmissão WLAN se comporta em ambientes fechados e com obstáculos. Para prever o comportamento deste sinal de rádio em ambientes internos, foi criada uma aplicação Java baseada em Fraiha (2009).
Resumidamente, a aplicação possui as seguintes etapas: expansão dos dados, cálculo dos parâmetros Padé, que servem para adaptar o modelo de previsão de perda de propagação em WLAN, e cálculo da probabilidade de recepção, Carneiro (2011) desenvolveu desde os níveis iniciais dos dados até a expansão dos dados, assim a aplicação é para a determinação dos parâmetros de Padé necessária uma rotina de mínimos quadrados não lineares (MQNL) com restrições em forma de campo.
Metodologia
Organização
O Capítulo 4 aborda MMQNL e discute os métodos Gauss-Newton e Levenberg-Marquardt, o último dos quais inclui restrições do tipo caixa. O Capítulo 6 discute brevemente os resultados obtidos com Levenberg-Marquardt com restrições do tipo caixa colocadas no programa discutido no Capítulo 5.
Observações
O Capítulo 3 aborda o MMQL e um caso especial desse método, que é a regressão linear. Procuramos resolver o sistema linear ou não linear 𝐺(𝜶; 𝒙) = 0, como em geral não existem soluções, procuramos soluções que minimizem ∑𝑚𝑖=1𝑔𝑖(𝜶; 𝒙). Essas soluções são chamadas de soluções de mínimos quadrados lineares (MQL) ou soluções de mínimos quadrados não lineares (MQNL) (CHONG, ŻAK, 2001).
Na discussão nos Capítulos 3 e 4 sobre o método dos mínimos quadrados lineares (LMQL) e o método dos mínimos quadrados não lineares (MMQNL) 𝒙 não será tratado como um vetor, mas sim como uma variável simples. O nome "normal" é porque o resíduo é ortogonal a cada um dos vetores 𝒖𝑗, a projeção ortogonal dos dados 𝒇 no espaço criado por 𝒖𝑗,𝑗 = 1: 𝑛, x tri é a coluna de melhor aproximação (WEDGE , 2000). Para o caso geral de MQL, diversas abordagens para resolver sistemas de equações lineares podem ser usadas para resolver o sistema normal.
Para encontrar o valor de 𝜶, você pode tentar resolver o sistema 𝑨𝑇𝑨𝜶 = 𝑨𝑇𝒇 usando a decomposição de Cholesky ou usar a fatoração QR da matriz 𝑨 (NOCEDAL, WRIGHT, 2006).
Regressão Linear
Outro critério para ajuste da reta é o critério minmax, que se baseia na minimização da distância até um ponto fora da reta, mas tem grande influência de um ponto isolado e indesejado (outlier) (DUKKIPATI, 2010). Procuramos 𝑎0 e 𝑎1 que minimizem a função < 𝑟, 𝑟 >, do cálculo diferencial no ponto crítico em que as derivadas se cancelam (CUNHA, 2000). Outra opção para a regressão linear é utilizar a bissetriz da regressão linear de 𝑦 em função de 𝑥 e a regressão linear de 𝑥 em função de 𝑦, e apresenta um dos melhores desempenhos da regressão linear. de 𝑦 em função de 𝑥 (BABU, FEIGELSON, 1992).
Conforme mostrado anteriormente no cálculo de 𝑎0 = 𝒚 − 𝑎1𝒙 e 𝑏0 = 𝒙 − 𝑏1𝒚, as retas da regressão linear de 𝑦 em função de 𝑥 e da regressão linear de 𝑥 em função de 𝑦 passam pelo ponto ( 𝒙, 𝒚) e a reta bissetriz deve necessariamente passar pelo ponto (𝒙, 𝒚) (RICH, THOMAS, 2009).
Exemplo de Ajuste de Dados a uma Reta
JAN 10.1
- Linearização de Modelos Não Lineares
- Exemplo de Ajuste de Dados com Linearização
- Cálculo Discreto da Matriz Jacobiana
- O Método de Gauss-Newton
- Exemplo de Ajuste de Curva com Gauss-Newton
- O Método de Levenberg-Marquardt
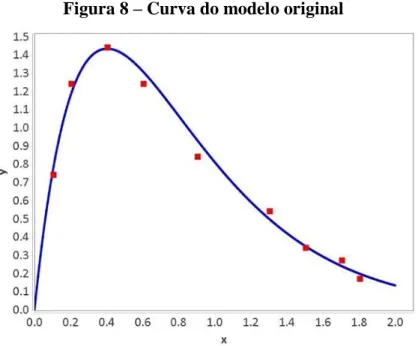
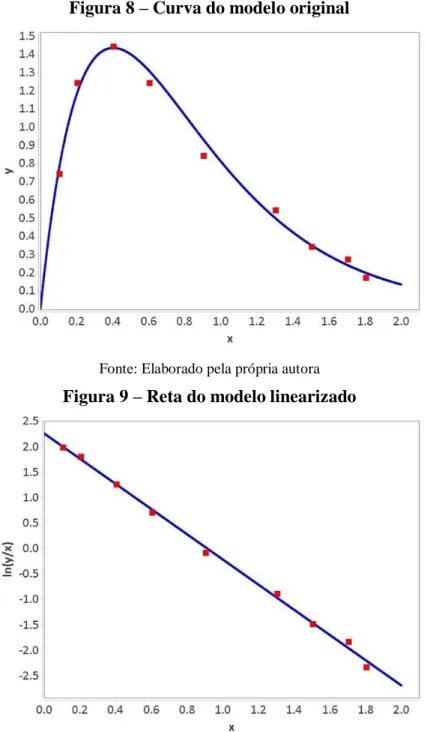
A relação entre a variável independente e dependente nem sempre é linear, mas em certos casos é possível fazer uma transformação para que os dados possam ser tratados com regressão linear, pois esta é uma alternativa mais simples do que utilizar um ajuste não linear. A linearização é um uso útil da composição de funções e funções inversas em que queremos obter de uma relação não linear uma relação linear para uma regressão linear tal que 𝑔(𝑓(𝑥)) = 𝑏 + 𝑚ℎ(𝑥) , onde 𝑓( 𝑥 ) = 𝑦, a função 𝑔 não é necessariamente a inversa de 𝑦, mas um tipo de “poliinverso” (TEAGUE, 2005). Com os valores determinados de 𝑏 e 𝑚, são então calculados os valores dos parâmetros 𝑎0 e 𝑎1 necessários para o modelo não linear.
Agora você pode trabalhar com regressão linear para encontrar os parâmetros que melhor ajustam o modelo não linear aos dados, assim são obtidos os resultados da Tabela 4, a soma dos quadrados dos resíduos dos dados transformados é: 0,0555 os resíduos dos dados não transformados é: 0,0212. No MMQNL a ideia básica é definir uma função que represente a soma dos quadrados dos resíduos, e buscam-se os parâmetros que minimizem essa função não linear porque o ajuste dos dados não é linear nos parâmetros (CUNHA, 2000). No minimizador local, que também será o minimizador global, visto que a função quadrática 𝐹′(𝜶∗) = 0 (MADSEN, NIELSEN, TINGLEFF, 2004).
A matriz Jacobiana é uma matriz que contém as derivadas parciais de primeira ordem de uma função vetorial ou pode ser escrita com os gradientes transpostos desta função. Aproximar 𝐹 com uma função quadrática torna tudo mais fácil porque a nova aproximação é obtida minimizando esta função quadrática. O método Gauss-Newton admite que 𝜶𝑘 está próximo do mínimo, então o resíduo 𝒓(𝜶𝑘) está próximo de zero.
Este método também pode ser entendido como um método de Newton modificado com busca linear. Em alguns casos, o método Gauss-Newton fornece convergência quadrática do que o método Newton para otimização em geral (MADSEN, NIELSEN, TINGLEFF, 2004). O método Levenberg-Marquardt, proposto por Levenberg (1944) e posteriormente Marquardt (1963), é um método de Gauss-Newton amortecido e em vez de uma busca linear, trabalha com uma estratégia de região de confiança com a mesma aproximação de Hessiana (MADSEN, NIELSEN, TINGLEFF, 2004). ).
Quando a matriz Jacobiana 𝐉(𝜶) tem um posto imperfeito ou está próximo dele, a estratégia da região de confiança é mais adequada do que a utilizada pelo método de Newton. A variável 𝜌 serve para indicar quão boa é a aproximação de 𝐿(𝒉) para 𝐹(𝜶 + 𝒉), valores grandes indicam uma boa aproximação e o valor de 𝜇 deve ser diminuído para permitir o Levenberg- Aumento de Marquardt para aproximar o Gauss-Newton.

O Método de Levenberg-Marquardt com Restrições do tipo Caixa
Neste caso, é possível utilizar uma transformação das variáveis para ficar dentro dos limites definidos pelo intervalo.
- Exemplo de Ajuste de Curva com Levenberg-Marquardt
- Sistemas de Equações Não Lineares
- Aproximantes de Padé e Redes Neurais RBF
- Medições
- Conclusões
- Trabalhos Futuros
- Informações Adicionais
Outra situação seria ajustar um conjunto de dados à seguinte curva 𝑓(𝑥) ≈ 𝑔(𝑥) = 𝛼1cos(𝛼2𝑥 + 𝛼3) + 𝛼4, agora utilizando o método Levenberg-Marquardt sem restrições e com restrições do tipo caixa. Colocando agora restrições do tipo caixa, com a mesma estimativa inicial, os parâmetros encontrados foram: 𝜶 levaram a outra solução do problema com os mesmos resíduos da anterior, sem restrições. Comparando a solução sem restrições com as soluções com restrições tipo caixa, verifica-se que a solução da terceira linha da Tabela 10 foi para o ponto mais próximo, enquanto na segunda linha isso não aconteceu.
Outro fato a ter em mente é que fazer restrições em forma de caixa não é o mesmo que calcular o valor de 𝑿 sem as restrições e depois apenas verificar se os valores estão dentro do intervalo de restrições ou não, caso contrário, substitua-os por um limite superior. MMQNL pode ser usado para determinar parâmetros Padé em software Java para posicionamento ideal de redes WLAN. Pereira (2016) deu continuidade às etapas desenvolvidas por Carneiro (2011) incluindo uma rotina MQNL com restrições em forma de caixa.
As aproximações de Padé são funções racionais, servem para aproximar funções transcendentais como a função exponencial. A Figura 28 mostra o comportamento do parâmetro 𝑎 para 6 valores de 𝑎 no intervalo e 𝑏 fixo com valor igual à unidade, no eixo 𝒙 os valores de 𝑥 e a função Padé no eixo 𝒚. A Figura 29 mostra o comportamento do parâmetro 𝑏 para 6 valores de 𝑏 no intervalo e 𝑎 fixo com valor igual à unidade, no eixo 𝒙 os valores de 𝑥 e a função Padé no eixo 𝒚.
Após a expansão dos dados, os parâmetros de Padé (valores de 𝑎 e 𝑏 em (5.1)) são calculados utilizando uma rotina MQNL, os parâmetros não podem assumir nenhum valor, não podem ser negativos, pois levam a uma má visualização dos obstáculos, idealmente, eles deveriam estar entre um limite inferior e superior, portanto a rotina MQNL deveria ser implementada com restrições do tipo caixa. O uso de MMQNL sem restrições e com restrições do tipo caixa será exposto para determinar parâmetros Padé em software Java para o posicionamento ideal de pontos de acesso WLAN em ambiente interno. As Figuras 31, 32 e 33 mostram a probabilidade de recepção de sinal para diferentes locais de pontos de acesso. Os parâmetros Padé foram determinados pelo método Levenberg-Marquardt.
Nas figuras 32 e 33 com ponto de entrada no local com potência igual a 18 e ganhos iguais a 0, utilizou-se Levenberg-Marquardt primeiro sem restrições e depois com restrições tipo caixa no intervalo [0, 4]. Sem restrições, um dos parâmetros apresentou valor negativo, enquanto com restrições do tipo caixa ambos obtiveram valores positivos, permitindo uma melhor visualização das paredes e divisórias como obstáculos. Implementar restrições do tipo caixa com a tangente hiperbólica é uma forma de forçar as variáveis a ficarem dentro do intervalo desejado. Uma vantagem de usá-las é que elas podem ser aplicadas a múltiplas variantes do MMQNL e não a uma implementação específica, não está condicionada.
Para trabalhos futuros, pode-se sugerir o cálculo dos parâmetros de Padé utilizando uma rotina de otimização mais moderna como Algoritmo Genético, Simulated Annealing ou Tabu Search. Trabalho resultante da Bolsa apresentada no XXXIV SIMPÓSIO BRASILEIRO DE TELECOMUNICAÇÕES – SBrT2016 realizado em Santarém, Pará, de 30 de agosto a 2 de setembro com o título “Predição de perda de propagação de WLAN usando a aproximação de Padé em Redes Neurais. .” Predição de perda de propagação em WLAN usando aproximação de Padé com redes neurais RBF.