Programa de Pós-Graduação em Matemática Aplicada e Estatística
Renato Tigre Martins da Costa
Gráfico de Controle Modificado para
Processos com Estruturas Complexas de Autocorrelação
Gráfico de Controle Modificado para
Processos com Estruturas Complexas de Autocorrelação
Trabalho apresentado ao Programa de Pós-Graduação em Matemática Aplicada e Esta-tística da Universidade Federal do Rio Grande do Norte, em cumprimento com as exigências legais para obtenção do título de Mestre.
Área de Concentração: Probabilidade e Esta-tística
Orientador:
Prof. Dr. André Luís Santos de Pinho
Costa, Renato Tigre Martins da.
Gráfico de controle modificado para processos com estruturas complexas de autocorrelação / Renato Tigre Martins da Costa. - Natal, 2015.
70 f.: il.
Orientador: Prof. Dr. André Luís Santos de Pinho.
Dissertação (Mestrado) – Universidade Federal do Rio Grande do Norte. Centro de Ciências Exatas e da Terra. Programa de Pós-Graduação em Matemática
Aplicada e Estatística.
1. Séries temporais – Dissertação. 2. Modelo MTD – Dissertação. 3. Modelo GMTD – Dissertação. 4. Cadeias de Markov – Dissertação. 5. Gráfico de Shewhart modificado – Dissertação. I. Pinho, André Luís Santos de. II. Título.
Gráfico de Controle Modificado para
Processos com Estruturas Complexas de Autocorrelação
Trabalho apresentado ao Programa de Pós-Graduação em Matemática Aplicada e Esta-tística da Universidade Federal do Rio Grande do Norte, em cumprimento com as exigências legais para obtenção do título de Mestre. Área de Concentração: Probabilidade e Esta-tística
Aprovado em: / /
Banca Examinadora:
Prof. Dr. André Luís Santos de Pinho
Departamento de Estatística - UFRN
Orientador
Profa. Dra. Carla Almeida Vivacqua
Departamento de Estatística - UFRN
Examinadora Interna
Prof. Dr. Pledson Guedes de Medeiros
Departamento de Estatística - UFRN
Examinador Interno
Profa. Dra. Linda Lee Ho
Departamento de Engenharia de Produção - USP
À CAPES pela bolsa de mestrado concedida, sem dúvida foi indispensável para minha dedi-cação exclusiva a esses dois anos de estudo. Ao PPgMAE e a todos os professores que fazem parte dele pela preocupação, disponibilidade e incentivo ao nosso crescimento acadêmico. Ao professor André Luís Santos de Pinho, meu orientador, que com sua competência e en-sinamentos ajudou a construir esse trabalho e me ensinou que dedicação e disciplina são fundamentais para ser um profissional brilhante.
À minha família, em especial aos meus pais e em memória à Tia Maria, que me incentivaram a fazer um curso de Pós-graduação.
À Nara Guimarães Azevedo, minha grande companheira, que me ajudou nos momentos difíceis sempre me motivando.
Aos colegas de mestrado que contribuíram com palavras, trocas de experiência e alegria nessa jornada. Principalmente a Fábio Azevedo, Rumenick Pereira, Wenia Felix, Eduardo Rangel, July Herbert que me ajudaram no decorrer do curso com as disciplinas e na redação do trabalho no software LATEX.
Este trabalho propõe um gráfico de controle modificado incorporando conceitos de análise de séries temporais. Especificamente, nós consideramos os modelos de distribuição de transi-ção e mistura gaussianas (GMTD). Os modelos GMTD são uma classe mais geral do que os modelos da família autoregressiva (AR), no sentido de que os processos autocorrelacionados podem apresentar trechos planos (platôs), explosões ou outliers. Neste cenário os Gráficos de
Shewhart tradicionais não são mais ferramentas adequadas para o acompanhamento desses processos. Portanto, Vasilopoulos e Stamboulis (1978) propuseram uma versão modificada dos gráficos, considerando limites de controle adequados com base em processos autocorrela-cionados. A fim de avaliar a eficiência da técnica proposta uma comparação com um gráfico tradicional Shewhart (que ignora a estrutura de autocorrelação do processo), o gráfico de controle Shewhart AR(1) e um gráfico de controle Shewhart GMTD foi feita. Uma expressão analítica para a variância processo, assim como os limites de controle foram desenvolvidos para um modelo GMTD particular. O ARL é utilizado como critério para medir a eficiência dos gráficos de controle. A comparação foi feita com base em uma série gerada de acordo com um modelo GMTD. Os resultados apontam para a direção que os gráficos modificados Shewhart GMTD têm um melhor desempenho do que o Shewhart AR(1) e o Shewhart tradicional.
Palavras-chave: Série temporal, MTD, GMTD, Cadeias de Markov, gráfico de Shewhart Modificado.
This work proposes a modified control chart incorporating concepts of time series analy-sis. Specifically, we considerer Gaussian mixed transition distribution (GMTD) models. The GMTD models are a more general class than the autorregressive (AR) family, in the sense that the autocorrelated processes may present flat stretches, bursts or outliers. In this scena-rio traditional Shewhart charts are no longer appropriate tools to monitoring such processes. Therefore, Vasilopoulos and Stamboulis (1978) proposed a modified version of those charts, considering proper control limits based on autocorrelated processes. In order to evaluate the efficiency of the proposed technique a comparison with a traditional Shewhart chart (which ignores the autocorrelation structure of the process), a AR(1) Shewhart control chart and a GMTD Shewhart control chart was made. An analytical expression for the process variance, as well as control limits were developed for a particular GMTD model. The ARL was used as a criteria to measure the efficiency of control charts. The comparison was made based on a series generated according to a GMTD model. The results point to the direction that the modified Shewhart GMTD charts have a better performance than the AR(1) Shewhart and the traditional Shewhart.
Keywords: Time Series, MTD, GMTD, Markov Chain, Modified Shewhart chart.
1 INTRODUÇÃO 2
1.1 Estrutura da Dissertação(terminar) . . . 6
2 CONTROLE ESTATÍSTICO DE PROCESSOS 7 2.1 Gráficos de Controle . . . 7
2.1.1 Gráfico de Shewhart para dados Autocorrelacionados . . . 9
2.1.1.1 Medida de Desempenho . . . 10
2.2 Gráficos de Shewhart Modificados . . . 12
3 FAMÍLIA DE MODELOS MTD 15 3.1 Cadeias de Markov . . . 15
3.2 Família de Modelos ARIMA(p,d,q) . . . 17
3.2.1 Modelo AR(p) . . . 18
3.2.2 Estacionariedade do AR(1). . . 18
3.2.2.1 Autocorrelações . . . 20
3.3 Modelo MTD . . . 20
3.3.1 Definição do Modelo MTD . . . 22
3.3.1.1 Estruturas de Autocorrelação . . . 24
3.3.1.2 Estruturas de Autocorrelação para Três Estados . . . 25
3.4 Modelo GMTD . . . 27
3.4.1 Estacionariedade . . . 29
4 METODOLOGIA 35
4.1 Variância do Modelo GMTD . . . 35 4.2 Variância da Média Amostral . . . 36 4.3 Simulação Computacional . . . 37
5 RESULTADOS E DISCUSSÃO 41
6 CONCLUSÃO 49
REFERÊNCIAS BIBLIOGRÁFICAS 49
A Esperança GMTD 54
B Variância GMTD 56
C Variância da Média 59
D Algoritmo EM 61
INTRODUÇÃO
Quando verificada a gêneses do processo, ou seja, ao identificar se o processo é linear ou não-linear, é possível definir quais os procedimentos estatísticos são mais eficientes e quais serão utilizados para a análise e monitoramento. Em particular, em um processo de produção industrial, no qual a principal ferramenta utilizada é o gráfico de controle, é fundamental distinguir a natureza do processo para se tomar a decisão correta sobre o seu estado: sob controle ou fora de controle. Visto que, os gráficos de controle convencionais (de Shewhart) necessitam de suposições de linearidade — ou seja, os esquemas requerem que as sequências de observações do processo tenham distribuição normal, sejam independentes entre si e tenham variância comum — a má escolha da ferramenta adequada pode comprometer o desempenho dos gráficos de controle (COSTA; EPPRECHT; CARPINETTI, 2009).
Em geral, é comum os processos violarem essas suposições e apresentarem estruturas de dependências ou de autocorrelação e se afastarem das estruturas convencionais de linearidade. Se a autocorrelação do processo é uma causa especial é interessante tentar eliminá-la, caso contrário deve-se levá-la em consideração no planejamento dos gráficos de controle (CLARO; COSTA; MACHADO,2007). Para lidar com essa questão, Shewhart desenvolveu os conceitos de subgrupos racionais, que consistem na retirada de pequenas amostras em intervalos de tempo regulares. A técnica é utilizada na tentativa de se reduzir ou eliminar completamente o efeito da autocorrelação serial (COSTA; EPPRECHT; CARPINETTI,2009).
Além do uso dos subgrupos, alguns autores incorporaram ao controle estatístico de pro-cessos (CEP) técnicas de análise de Séries Temporais. Por exemplo, Claro, Costa e Machado (2007) realizaram a integração quando trataram dos gráficos de controle de EWMA e X e
utilizaram no monitoramento de processos cujas observações podem ser descritas por um mo-delo autoregressivo de primeira ordem, AR(1). Os gráficos de controle desse artigo foram planejados levando em consideração a correlação presente na série, utilizando-se dos conceitos
de sub-grupo racional como técnica de amostragem com o intuito de minimizar ou elimi-nar o efeito da autocorrelação entre os grupos. Franco et al. (2014), também monitoraram um processo que pode ser descrito por um modelo AR(1) em que as observações são auto-correlacionadas, bem como investigaram o design econômico estatístico, que foi introduzido por Duncan (1956) como um problema de otimização não-linear. No artigo de Franco et al. (2014), os autores introduziram uma estratégia de amostragem para a construção de subgru-pos chamada Skip, que consiste em modificar as regras de sub-agrupamento racionais através
da construção de amostras com itens não-vizinhos, a fim de reduzir a dependência entre as observações. Além disso, afirmam através de simulações computacionais, que a técnica Skip
é mais eficiente do que a estratégia de subgrupos racionais.
Mingoti e Yassukawa(2008), avaliaram quinze gráficos de controle, utilizando o ARL para a escolha do gráfico que mais se adequou ao processo. Os gráficos avaliados foram o de Shewhart clássico, isto é, com a variância amostral estimando a variância do processo, o de Shewhart com a variância do processo sendo estimada por cinco metodologias de geoestatística, que foram sugeridas porMingoti e Neves(2005), o de CUSUM com seis formas de escolha das constantes do algoritmo de CUSUM, o de EWMA com duas formas de escolha dos valores das constantes e um gráfico gerado através dos resíduos do respectivo modelo ARIMA ajustado aos dados da série. Esses gráficos foram usados para o monitoramento de um processo autocorrelacionado. Silva (2011), abordou o impacto que a autocorrelação provoca nos gráficos da média. Nesse trabalho as observações são autocorrelacionadas e podem ser descritas pelos modelos AR(1) e AR(2), além disso foi utilizado o conceito de subgrupo racional como técnica de amostragem. Timmer, Jr e Longnecker (1998), avaliaram o desempenho do gráfico de CUSUM quando a sequência de observações são modeladas por um processo autorregressivo de ordem 1.
qualquer gráfico univariado. Ord et al.(2009), fizeram extensões do gráfico de Shewhart para monitorar séries econômicas e de processos sociais descritas por um modelo GARCH, com isso concluíram que a ideia desenvolvida pode, claramente, ser estendida para os gráficos de EWMA, como também para os gráficos da amplitude ou do desvio padrão condicionalmente heterocedásticos utilizado para monitorar a variabilidade. Santos(2012), monitorou uma série de retornos autocorrelacionados, de uma empresa do setor financeiro, fazendo uma compara-ção entre os gráficos de CUSUM e EWMA. Para modelar a série, ajustou um modelo ARMA para remover uma possível correlação presente, pois um dos pressupostos para se utilizar os modelos da família ARCH é que os dados sejam não correlacionados, em seguida utilizou o quadrado dos resíduos para ajustar o modelo GARCH. Após calcular o ARL pôde perceber que o gráfico de EWMA foi mais adequado para monitorar a série.
A partir desses estudos pode-se perceber que a integração dos gráficos de controle com estruturas lineares eram feitas com os modelos tradicionais da família de modelos autoregres-sivos integrados de médias móveis – ARIMA, propostos por Box e Jenkins (1976). Enquanto a integração com as estruturas não-lineares eram feitas através dos modelos da família ARCH, inicialmente propostos por Engle (1982). Entende-se na estatística como processos lineares aqueles em que as sequências de observações têm distribuição normal, são independentes entre si e têm variância comum em toda a sequência. Logo, pode-se entender como não-lineares os processos que se afastam dessas estruturas convencionais de linearidade (MORETTIN; TOLOI, 2006).
Uma outra saída para tratar os dados autocorrelacionados é o monitoramento da série através do gráfico modificado de Shewhart, essa metodologia foi introduzida por Vasilopoulos e Stamboulis (1978) e é uma extensão do gráfico de Shewhart clássico. Essa técnica sugere uma modificação nos limites de controle do gráfico de Shewhart. Quando a suposição de independência não é satisfeita, os autores utilizam uma abordagem de análise de Séries Tem-porais para explicar a dependência das observações que são expressas através de um processo autoregressivo de segunda ordem (VASILOPOULOS; STAMBOULIS, 1978).
Alguns autores ampliaram o trabalho feito por Vasilopoulos e Stamboulis (1978) para os gráficos de controle de CUSUM e EWMA, como exemplo, Schmid (1995) que incorporou as técnicas do gráfico modificado ao gráfico de CUSSUM e Patel e Divecha (2011) que introdu-ziram o gráfico de EWMA modificado. Gonçalves, Leite e Mendes-Lopes (2013) construíram o gráfico modificado de Shewhart quando as estruturas dos dados monitorados eram descritas por outros modelos de séries temporais, em que introduziram a modelagem da série pelos modelos ARCH (Autoregressivo com heteroscedasticidade Condicional) e TARCH (Threshold
Uma abordagem alternativa para descrever as estruturas dos dados é dada pela família de modelos de distribuição de transição e mistura – MTD, ou em inglês mixture transition distributions, que tiveram origem no modelo desenvolvido por Raftery (1985a) para estimar matrizes de transição de ordens mais elevadas, que segundo o autor modela tais matrizes de forma mais eficiente que as cadeias de Markov usuais e os modelos alternativos de Jacobs e Lewis (1978), Pegram (1980) e Logan (1981). Esse modelo é análogo ao autoregressivo de
l-ésima ordem, uma vez que, cada defasagem adicional, depois da primeira, é especificada por
um único parâmetro e as autocorrelações satisfazem um sistema linear de equações semelhantes às equações de Yule-Walker. O modelo análogo, no entanto, é mais geral do que os modelos convencionais, pois estima toda a função de distribuição de probabilidade de uma próxima observação em vez de fazer uma previsão pontual. Uma desvantagem desse modelo é o fato da esperança e variância não apresentarem uma expressão fechada.
Outro modelo dessa família é o dedistribuição detransição emisturagaussiana – GMTD, ou em inglês gaussianmixture transitiondistributions, criado porLe, Martin e Raftery(1996) e é uma extensão do modelo MTD para casos mais gerais, esse modelo atua bem em casos que a série temporal indicar comportamentos Gaussianos dentro do padrão, de forma equivalente, também atuam perfeitamente para descrever comportamentos não Gaussianos e não-lineares como platôs, explosões eoutliers. Esse pode representar séries temporais definidas em espaço
de estados arbitrários, univariados ou multivariados, contínuos, discretos ou mistos, que não precisam ser euclidianos. Os autores afirmam, por intermédio de simulação, que o modelo GMTD pode capturar as características dos dados melhor do que modelo concorrente autore-gressivo integrado de médias móveis (ARIMA) (LE; MARTIN; RAFTERY,1996). Uma outra vantagem desse modelo específico com relação ao MTD, é que é possível se obter expressões fechadas para a esperança e variância.
Tomando como base Gonçalves, Leite e Mendes-Lopes(2013) que monitoraram os proces-sos em que os dados são descritos por outros modelos de series temporais, o presente trabalho tem como objetivo propor o uso de uma técnica alternativa de monitoramento de processos autocorrelacionados, integrando as técnicas dos gráficos de controle modificados introduzidos por Vasilopoulos e Stamboulis (1978) juntamente com classe de modelos de distribuição de transição e mistura Gaussiana, GMTD introduzida por Le, Martin e Raftery(1996).
Shewhart AR(1) uma vez que o modelo GMTD é mais geral que o modelo AR(1) no sentido de captar padrões que o AR(1) não consegue modelar.
É importante relatar que, do ponto de vista do que está sendo sugerido, não foram encon-tradas referências que integrassem as duas técnicas propostas nesse trabalho, contudo foram encontradas referências com os conteúdos das técnicas separadamente. As buscas foram reali-zadas nas bases de pesquisa do Periódicos Capes, Mathscinet, Zentralblatt Math e no Google Scholar. Ao ponto dessa técnica alternativa, talvez, ser a primeira experiência do uso de gráficos de controle modificados e dos modelos da família MTD.
1.1
Estrutura da Dissertação(terminar)
Este trabalho foi dividido em seis capítulos, no capítulo 1 pode ser visto o referencial teórico bem como os objetivos e o que esperamos com esse trabalho. O capítulo 2 traz os principais conceitos dos gráficos de controle, como os limites de controle e as medidas de desempenho para os gráficos controle de Shewhart clássicos, o Shewhart construído para dados autocorrelacionados e o Shewhart modificado. No capítulo 3 são apresentados alguns conhecimentos preliminares sobre cadeias de Markov e modelos autoregressivos de p-ésima e
primeira ordem, bem como a definição e as restrições dos modelos MTD e GMTD.
CONTROLE ESTATÍSTICO DE
PROCESSOS
2.1
Gráficos de Controle
Conhecimentos Preliminares
Os gráficos de controle são amplamente utilizados como ferramenta no Controle Estatístico de Processos (CEP). Os primeiros conceitos de gráficos estatísticos de controle surgiram por volta da década de 20, do século 20, na fábrica Bell Telephone, quando Walter A. Shewhart sugeriu uma técnica para controlar o percentual de defeitos em um processo de produção (MONTGOMERY, 2004). Devido a sua facilidade de interpretação no chão de grandes fábri-cas, o gráfico de Shewhart se tornou o gráfico de controle mais popular (COSTA; EPPRECHT; CARPINETTI, 2009).
Os gráficos de controle podem ser pensados como uma regra de decisão estatística, que quando tomada irá distinguir se a característica de qualidade de interesse está sofrendo algum desvio do valor alvo, causando desajustes no processo. A representação gráfica das caracterís-ticas de qualidade, para o monitoramento da média quando a distribuição é simétrica em torno da média, consiste em três linhas horizontais equidistantes, a linha central, denominado de limite central (LC), representa o valor alvo do processo, isto é, o valor médio da característica de interesse e as outras duas linhas são denominadas de limite superior de controle (LSC) e
limite inferior de controle (LIC) e suas expressões são explicitadas a seguir,
LSC = µ0+kσX¯
LC = µ0 (2.1)
LIC = µ0−kσX¯
em que, µ0 é o valor alvo do processo sob controle, k é uma constante que indica a largura do intervalo (geralmente é tomado o valor três para k) eσX¯ indica o desvio padrão da média. Como a dispersão dos valores de X¯ pode ser calculada por σ2
¯
X =σ
2
X/n, os limites de controle
ficam expressos da seguinte maneira
LSC = µ0+k
σ
√n
LC = µ0 (2.2)
LIC = µ0−k
σ
√
n
Para utilizar esses gráficos, utilizando esses limites, é necessário que as observações do processo sejam normalmente distribuídas e independentes entre si. Ainda que a condição de normalidade seja ligeiramente ou moderadamente descumprida, esses gráficos terão um desempenho plausível. A independência das observações é suposição indispensável para os gráficos de controle convencionais, em razão da má funcionalidade dos gráficos na presença da correlação serial das observações, em outras palavras, se a condição de independência for violada a credibilidade desses gráficos é comprometida (MONTGOMERY,2004).
Montgomery (2004), cita dois exemplos de processos em que as características das obser-vações podem apresentar altos níveis de autocorrelação. O primeiro são os processos químicos em que as medidas consecutivas podem apresentar alguma relação, o segundo são os processos de inspeção automatizados em que toda característica de qualidade é medida em uma ordem temporal de produção. Outro exemplo é dado em Costa, Epprecht e Carpinetti (2009), em que foram monitoradas 150 medições sucessivas (espaçadas de três minutos) da temperatura de um banho químico.
qualidade possuem autocorrelação, mesmo que em um nível não tão elevado, é o aumento do risco α — também denominado de probabilidade do erro do tipo I, ou seja, a probabilide de uma observação cair fora dos limites de controle quando o processo é dito em controle — e isso faz a eficiência e o poder de detecção diminuirem consideravelmente (COSTA; EPPRECHT; CARPINETTI, 2009).
Montgomery(2004), apresenta duas abordagens para tratar os dados autocorrelacionados. A primeira é a empregada por Runger e Willemain (1996), em que os autores baseiam-se em médias não-ponderadas de um lote. Nesse artigo os autores comparam o desempenho de várias combinações de espaçamento entre os subgrupos e tamanhos de subgrupos, no qual os dados do processo são descritos por um modelo AR(1). A segunda abordagem consiste em remover as estruturas de autocorrelação dos dados por meio de ajustes de modelos de séries temporais, essa abordagem será melhor explicada na Seção 2.1.1.
2.1.1
Gráfico de Shewhart para dados Autocorrelacionados
Nessa seção é investigado como se comporta o gráfico de Shewhart quando os dados não são independentes e podem ser ajustados pelo modelo AR(1), conforme descrito abaixo,
Xt =φ1Xt−1+at (2.3)
em que,φ1 é um parâmetro real, no qual,|φ1|<1e oaté o erro no instantet. A sequência de
variáveis aleatórias at é suposta independente seguindo distribuição normal com média zero e
variância σ2, isto é, a
t ∼ N(0, σa2t). Magalhães, Ho e Costa (2008) mostram que a variância
do processo e a do erro tem a seguinte relação,
σ02 = σ 2
at
1−φ2
1
(2.4)
além disso, os autores mostram que o desvio padrão da média, σ( ¯Xt), é dado por,
σ( ¯Xt) =
σ0 √
nC2
(2.5)
em que, segundo Franco et al. (2014),C2
C2 =
s
n
n+Pnj=1−12(n−j)φj1
=
r n
n+ 2(φn1+1−nφ2
1+ (n−1)φ1)/(φ1−1)2
(2.6)
Magalhães, Ho e Costa (2008), asseguram que o valor da constanteC2 é uma quantidade que pode variar entre 0 e 1 e que para φ = 0 as observações do processo tornam-se indepen-dentes e C2 = 1. Eles ainda trazem, conforme a Tabela (2.1), os valores para nC2−2 quando o tamanho da amostra vária entre 2 e 6.
n nC2−2
2 2 + 2φ
3 3 + 4φ+ 2φ2
4 4 + 6φ+ 4φ2+ 2φ3
5 5 + 8φ+ 6φ2+ 4φ3+ 2φ4
6 6 + 10φ+ 8φ2+ 6φ3+ 4φ4+ 2φ5
Tabela 2.1: Expressões de nC2 2.
Desta forma, os limites de controle para os processos autocorrelacionados que podem ser descritos por um modelo autoregressivo de primeira ordem é dado por,
LSC = µ0+k
σ0
C2√n
LS = µ0 (2.7)
LIC = µ0−k
σ0
C2√n
2.1.1.1 Medida de Desempenho
amostras até o primeiro ponto cair fora dos limites de controle. Para os gráficos de controle de Shewhart o ARL segue abaixo,
ARL= 1
P(um ponto cair fora do limite de controle). (2.8)
Para Costa, Epprecht e Carpinetti(2009), os gráficos de controle podem ser interpretados como uma sequência de testes de hipóteses, nos quais,
H0 : µ=µ0
H1 : µ6=µ0
logo, esses gráficos estão vulneráveis aos erros de decisão que podem ser cometidos em todo teste de hipóteses. Se o processo está em controle (H0 verdadeiro), α representa a probabili-dade de considerar o processo fora de controle quando, na verprobabili-dade, está sob controle (isso é o mesmo que um ponto cair fora dos limites de controle com o processo sob controle, o que caracteriza um alarme falso).
Se o processos estiver fora de controle (H1 verdadeira), β representa a probabilidade de considerar o processo em controle quando, na verdade, está fora de controle. A Tabela (2.2) mostra um resumo dos possíveis erros cometidos e suas respectivas probabilidades,
Hipótese H0
Decisão
Aceitar H0 Rejeitar H0
Natureza Probabilidade Natureza Probabilidade Verdadeira Não há erro 1−α Erro do Tipo I α
Falsa Erro do Tipo II β Não há erro 1−β
Tabela 2.2: Decisões em um teste de hipóteses.
Logo, é interessante que se o processo está sob controle se tenha o maior número de observações dentro dos limites de controle, isso faz com que o α — probabilidade do Erro do Tipo I — seja um valor pequeno. Da mesma forma, pode-se pensar para o processo fora de controle, que para o gráfico ter um bom desempenho é importante que o alarme verdadeiro seja detectado tão logo houver a mudança no processo, isto é, que se tenha a menor quantidade de observações dentro dos limites de controle até a ocorrência do primeiro ponto fora dos limites, o que faz o valor de 1−β, também chamado de poder, ser um valor alto.
Sabe-se que a distribuição geométrica pode ser pensada para modelar o número y de
sucesso. Então, considerando que um alarme é o sucesso, pode-se calcular a probabilidade de ocorrência do primeiro alarme no n-ésimo ensaio (amostra) por,
P(X =n) = p(1−p)n−1 (2.9)
logo, para se calcular o número médio de amostras até o primeiro alarme basta efetuar a esperança da distribuição geométrica,
E(X) = 1
p. (2.10)
Com base nas equações (2.8), (2.10) e na Tabela (2.2), tem-se que o número médio de amostras até a ocorrência de um ponto fora dos limites de controle de Shewhart, quando o processo está sob controle, pode ser calculado pela expressão definida por ARL0,
ARL0 = 1
α (2.11)
e quando o processo está fora de controle, o número médio de amostras até a ocorrência de um ponto fora dos limites controle de Shewhart, calcula-se pela sentença definida por ARL1,
ARL1 = 1
1−β (2.12)
2.2
Gráficos de Shewhart Modificados
Em geral os gráficos de Shewhart clássicos são construídos assumindo que os dados do processo são independentes e normalmente distribuídos. Entretanto, na prática, nem sem-pre essas suposições são atendidas. Contudo, nos últimos anos a aplicabilidade dos gráficos clássicos têm sido ampliada, e muitos autores têm estudado a influência que a autocorrelação presente nos dados tem sob gráficos de controle, por exemplo Magalhães, Ho e Costa (2008), Franco et al.(2014), Claro, Costa e Machado (2007),Mingoti e Yassukawa (2008), avaliaram tal efeito. Esses utilizaram os conceitos de sub-grupos racionais ou Skip como técnicas de
amostragem na tentativa de sanar o problema que a autocorrelação causa no ARL.
de-pendências. Para o uso do gráfico de Shewhart modificado não é necessária a construção de sub-grupos, em razão da alteração não ser feita diretamente nos dados e sim nos limites de con-trole. Esses gráficos foram desenvolvidos quando Vasilopoulos e Stamboulis (1978) definiram um processo cujo controle foi investigado por,
ξt=β+Xt (2.13)
em que, β é uma constante e Xt é uma série temporal estacionária com média zero e desvio
padrãoσ. Então, os autores supuseram que existia autocorrelação na sérieXte sugeriram que
o melhor modelo que se ajustava a essa série era o modelo AR(p), conforme descrito abaixo,
Xt=φ1Xt−1+φ2Xt−2+· · ·+φpXt−p +at (2.14)
se todos os parâmetros φp forem iguais a zero, o processo Xt é ruído branco, que é o modelo
de controle clássico (VASILOPOULOS; STAMBOULIS, 1978). Então foi considerado que somenteφ1 eφ2 eram diferentes de zero, construindo assim as teorias dos gráficos modificados baseando-se nos parâmetros do modelo AR(2).
A grande contribuição dos gráficos modificados é que os desvios são comparados com o desvio padrão da série ajustada (KRAMER; SCHMID,1997), então para fazer essa extensão basta incorporar ao desenvolvimento dos gráficos clássicos estruturas de séries temporais.
Os limites de controle para esse gráfico podem ser calculados da seguinte maneira,
LSC =µ0+k√γ0
LC =µ0 (2.15)
LIC =µ0−k√γ0
em que, k é uma constante que indica a largura do intervalo e γ0 representa a variância da série temporal que será abordada com mais detalhes no capítulo 4. O processo é dito estar fora de controle se,
|Xt−µ0|> k√γ0 (2.16)
e Schmid(1999), Gonçalves, Leite e Mendes-Lopes (2013), Patel e Divecha(2011) utilizaram os princípios dos gráficos modificados e estenderam suas aplicações aos gráficos de CUSSUM e EWMA, juntamente com os modelos da família ARCH. Nesses artigos uma definição formal para o ARL é dada, sendo descrita da seguinte maneira,
ARL=E(N) (2.17)
em que, se definiu N de acordo com a seguinte expressão,
N =inf{t∈N:|Xt−µ0|> k√γ0} (2.18)
FAMÍLIA DE MODELOS MTD
Conhecimentos Preliminares
3.1
Cadeias de Markov
Uma cadeia de Markov é um processo estocástico com estados discretos que possui pro-priedades Markoviana. Essa propriedade é chamada assim em homenagem ao seu idealizador, Andrej Andreevic Markov, que por volta do ano de 1906 obteve os primeiros resultados com as matrizes de transição ao representar, através das probabilidades condicionais, as dependências sucessivas entre observações de uma variável aleatória. As cadeias de Markov têm aplicações em várias áreas do conhecimento, por exemplo, meteorologia, ciências sociais, música entre outras.
Entende-se por processo estocástico como sendo uma coleção de variáveis aleatórias {Xt:
t ∈ N}, em que Xt é uma variável aleatória que toma valores no conjunto E = {1,· · · , m},
chamado espaço de estados, e t representa o espaço de tempo, em geralt ∈N, ou seja,t é um
tempo discreto.
Ao se considerar o processo {Xt}como uma sequência de observações em tempo discreto,
a probabilidade de uma observação em uma cadeia de Markov com espaço de estado finito, que toma valores no conjunto E, pode ser descrita por
P[Xt =j0|X0 =jt,· · · , Xt−1 =j1] =qj1j0(t), (3.1)
em que, qj1j0(t) é um elemento da matriz de transição Qm×m, logo 0< qj1j0(t)<1.
A propriedade Markoviana diz que a observação atual no tempotdepende somente do seu
passado imediato, isto é, da observação no tempot−1. Em outras palavras dada a observação no tempot−1 a observação no tempo t é condicionalmente independente de todas as outras observações passadas. Logo, a equação (1) pode ser reescrita da seguinte maneira,
P[Xt=j0|Xt−1 =j1] =qj1j0(t), (3.2)
de tal forma, que a matriz de transição Qm×m poderá ser descrita conforme a matriz abaixo,
Xt
Q =
Xt−1 1 · · · m
1 q11 · · · q1m
... ... ... ... ... ... ... ...
m qm1 · · · qmm
em que, o elementoq12 representa a probabilidade de transição do estado inicial, que para esse elemento é igual a 1, para o estado seguinte, que é igual a2.
Seja o vetor χt definido por,
χt = (xt(1),· · ·, xt(m))′ (3.3)
tal que,
xt(i) = (
1 , se Xt=i
0 , c.c.
(3.4)
por exemplo para um processo com três estados 1, 2 e 3, observa-se que se,
Xt= 1 ⇒χt = (xt(1),0,0)⇒χt= (1,0,0)
Xt= 2 ⇒χt = (0, xt(2),0)⇒χt= (0,1,0) (3.5)
e sejaχˆt um vetor de probabilidades, definido por,
ˆ
χt = (P(Xt= 1),· · ·, P(Xt=m))′ (3.6)
com isso, tem-se que as seguintes relações são válidas,
ˆ
χ′
t = χ′t−1Q (3.7)
ˆ
χ′
t = χ′0Qt (3.8)
logo, o processo será completamente determinado quando a matriz de transição Q e o vetor inicial χ0 forem especificados.
3.2
Família de Modelos ARIMA(p,d,q)
Também denominado de modelo de Box e Jenkins devido aos nomes de seus criadores, esse modelo foi introduzido inicialmente no ano de 1976 por George Box e Gwilym Jenkins, e é uma metodologia bastante utilizada para modelagem e em previsões de séries paramétricas (MORETTIN; TOLOI, 2006).
A análise de Séries Temporais utilizando as metodologias do modelo ARIMA é mais so-fisticada do que as adotadas pelos modelos de tendência linear, pois ela emprega o uso de modelos de filtros lineares. Neste modelo a série temporal é gerada através de um filtro linear em que a entrada é ruído branco (BOX; JENKINS; REINSEL,2008).
A palavra ARIMA é uma sigla em inglês que significa autoregressive integrated moving
average, e em português significa modelo auto-regressivo integrado de média móvel. Os
pa-râmetros p, d e q significam respectivamente o número de termos autoregressivos, o número
de diferenças e o número de termos médias móvel. No caso em que d = 0, tem-se o modelo ARMA(p, q), e no caso em que p = 0, tem-se o modelo MA(q) e no caso em que q = 0, tem-se o modelo AR(p). O modelo é identificado baseado na própria série observada, em que é possível seguir o seguinte algoritmo:
• considera-se uma classe mais geral da família de modelos para a análise;
• identifica-se um modelo com base na análise das funções de autocorrelação (acf), auto-correlação parcial (pacf);
• verifica se o modelo ajustado é adequado aos dados através de uma análise de resíduos; • caso o modelo não seja adequado o algoritmo é repetido, voltando à fase de identificação.
3.2.1
Modelo AR
(
p
)
Em estatística o modelo autoregressivo (AR) é uma realização finita de um processo esto-cástico estacionário, isto é, sendo T um conjunto arbitrário finito, a família X={Xt:t∈T}
na qual, para cada t ∈ T, Xt é uma variável aleatória, tem-se que a média e a variância são
constantes, ou seja, E[Xt] =µe V ar[Xt] =σ2.
Pode-se dizer que o processo {Xt:t∈T} é AR(p), isto é, autoregressivo de ordem p, se,
Xt = φ1Xt−1+φ2Xt−2+· · ·+φpXt−p+δ+at
=
p X
i=1
φiXt−i+δ+at (3.9)
em que φ1,· · · , φp, são parâmetros reais, δ é uma constante que tem relação com a média e
at é o erro no instante t, também chamado de ruído branco. O ruído at é independente e
identicamente distribuído(i.i.d.) com média zero e variância igual a σ2, isto é, E[a
t] = 0 e
V ar[at] =σ2, para todo t.
Nesse trabalho será utilizado o caso mais simples do modelo autoregressivo o AR(1), de-nominado de modelo de primeira ordem,
Xt =φ1Xt−1+δ+at (3.10)
em que o processo Xt depende apenas dele mesmo no instante imediatamente anterior e do
ruído no instante t, ou seja, Xt depende de Xt−1 e do at.
A expressão para a média do AR(1) é da seguinte forma:
µ= δ
1−φ1
. (3.11)
3.2.2
Estacionariedade do AR(1)
permane-cem as mesmas sob translação no tempo, isto é,
F(x1,· · · , xn;t1+τ,· · · , tn+τ) =F(x1,· · · , xn;t1,· · · , tn) (3.12)
para quaisquer t1,· · · , tn, τ de T.
Em outras palavras, isto significa que todas as distribuições unidimensionais têm constantes a média µ(t) e a variância V ar(t), ou seja,
µ(t) =µ V ar(t) =σ2 (3.13)
Morettin e Toloi (2006) trazem a seguinte proposição,
Proposição 3.1 Um processo linear será estacionário se a sérieψ(B)convergir para|B| ≤1.
De outra forma, a Proposição 3.1, quer dizer que o processo será estacionário se convergir para o processo de médias móveis infinitas.
Pode-se mostrar, segundo Box, Jenkins e Reinsel (2008), que substituindo-se sucessiva-mente X1, X2, · · ·, em (3.10), o processo {Xt}, poderá ser escrito da seguinte maneira,
Xt= 1−φ1B−1at= ∞
X
j=0
φj1at−j (3.14)
isto é,
Xt=ψ(B)at= (1 +φB+φ2B2+· · ·)at (3.15)
então,
ψ(B) = ∞
X
j=0
φjBj = [φ(B)]−1
= (1−φB)−1 (3.16)
de acordo com a Proposição (3.1) o processo será estacionário seψ(B)convergir para|B| ≤1.
3.2.2.1 Autocorrelações
Se {Xt : t ∈ T} é um processo estocástico estacionário, a autocovariância será calculada
da seguinte maneira,
γk=Cov(Xt, Xt−k) =E(Xt−µ)(Xt−k−µ) k= 1,2,· · · (3.17)
A variância é um caso particular de γk, ela é calculada quando k = 0,
γ0 =V ar(Xt) = E(Xt−µ)2 =σ2 (3.18)
para o modelo AR(1), tem-se que a variância é dada por,
γ0 =
σ2
1−φ2
1
(3.19)
A função de autocorrelação do modelo autoregressivo é calculada da seguinte maneira,
ρk=
γk
γ0
k= 1,2,· · · (3.20)
ao se substituir o valor de k na equação (3.18) é possível verificar que as equações formadas
satisfazem um conjunto de equações de Yule-Walker,
ρk=φ1ρk−1+φ2ρk−2 +· · ·+φpρk−p (3.21)
3.3
Modelo MTD
O modelo MTD foi introduzido porRaftery(1985a) para estimar matrizes de transição de ordens mais elevadas e espaço de estados finito, com menos parâmetros do que uma cadeia de Markov com todos seus parâmetros. As cadeias de Markov podem representar dependências de ordens mais elevadas entre observações sucessivas de uma variável aleatória. Entretanto, uma cadeia de Markov completamente parametrizada tem ml(m
−1) parâmetros independentes
para serem estimados enquanto o modelo MTD tem somente m(m−1) + (l−1) parâmetros
independentes, em que l é a ordem da cadeia e m é o número de possíveis valores assumidos
no processo, ou seja, m é o espaço de estados. Em outras palavras, pode-se dizer que, o modelo MTD é mais parcimonioso do que as cadeias de Markov. Pois se os valores de l e
exponencialmente tornando suas estimativas não confiáveis.
Além de ser mais parcimonioso, uma outra vantagem do uso do modelo MTD, ao invés da cadeia de Markov, e que em algumas situações pode ser útil, é muitas vezes necessário, utilizar todos os valores passados da série. No contexto das cadeias de Markov, tem-se que o número de períodos defasados utilizados para especificar a distribuição condicional do estado atual, seguindo a propriedade Markoviana, é igual a um, sendo assim não é possível o uso de todos os valores da série, enquanto que no MTD pode-se utilizar todas as defasagens passadas.
Uma desvantagem do MTD é que ele não será uma boa escolha quando o processo apre-sentar um número muito grande de estados, mesmo quando esses forem discretos, em razão da matriz de transição ficar muito grande, uma vez que o modelo foi desenvolvido para pro-cessos que possuem espaço de estados finitos. SeguindoRaftery (1985b), um exemplo em que o espaço de estado é grande é dado quando o processo representa contagens de eventos em um determinado momento. Uma solução para isso é utilizar uma modelagem que pode ser realizada com um espaço de estados arbitrário.
Um modelo mais geral que se adéqua ao caso de processos com espaço de estados arbi-trário é o GMTD. Esse modelo é um extensão do MTD e foi introduzido por Le, Martin e Raftery (1996). Esse modelo é utilizado para descrever outliers (ou seja, picos na série),
explosões (períodos de baixa variabilidade seguidos de períodos de alta variabilidade), bem como platôs,(trechos planos na série) que representam curtos períodos de constância na série. Além desses, esse modelo também pode explicar séries temporais que apresentam heteroce-dasticidade e distribuições marginais multimodais.
Um outro modelo surge quandoBerchtold(2003) permiti que o desvio padrão de cada com-ponente possa ser escrito em função do passado do processo observado, alargando um pouco mais as aplicações dos modelos da família MTD, criando assim o HMTD (Heteroscedastic Mixture Transition Distribution). Esse modelo permite explicar séries temporais que
3.3.1
Definição do Modelo MTD
Considerando {Xt:t∈N}uma sequência de variáveis aleatórias de uma série temporal, o
modelo MTD pode ser definido da seguinte maneira,
P[Xt=j0|Xt−1 =j1,· · · , Xt−l =jl] = l
X
i=1
λiqjij0, (3.22)
em que, j1· · ·jl e j0 ∈ E ={1,· · · , m}, qjij0 são elementos da matriz de transição Qm×m =
[qjij0] na qual cada linha soma um e λ = (λ1,· · ·λl) ′
é um vetor contendo os parâmetros de pesos. Para que o modelo tenha sentido, as seguintes restrições são feitas a cerca dos seus parâmetros,
0≤
l
X
i=1
λiqjij0 ≤1 (3.23)
λi ≥ 0 (3.24)
l
X
i=1
λi = 1 (3.25)
O modelo MTD é análogo ao modelo Autoregressivo de ordem
l
, AR(l
), visto que, cada defasagem adicional é especificada por um único parâmetro, no caso do MTD pelo λ, e asautocorrelações satisfazem um sistema linear de equações semelhante às equações de Yule-Walker. Além disso, pode-se notar que a probabilidade condicional de se observar Xt = j0 dadas as observações passadas é uma combinação linear de cada Xt−1,· · ·, Xt−l.
Outra forma de se escrever o modelo é sugerida porRaftery(1985a), caso toda a distribui-ção do Xt seja dada, é a forma matricial. Seja χt e χˆt vetores definidos pelas equações (3.3)
e por (3.6), então o modelo MTD poderá ser reescrito assim,
ˆ
χ′ t=
l
X
i=1
λiχ′t−iQ (3.26)
Com isso, a matriz de transição de um processo caracterizado pelo modelo MTD de ordem dois e que possui espaço de estados igual a três poderá ser descrita da seguinte maneira,
MTD =
Xt−2 Xt−1 Xt−1 1 2 3 1 2 3 1 2 3
1 1 q111 0 0 q112 0 0 q113 0 0 2 1 q211 0 0 q212 0 0 q213 0 0 3 1 q311 0 0 q312 0 0 q313 0 0 1 2 0 q121 0 0 q122 0 0 q123 0 2 2 0 q221 0 0 q222 0 0 q223 0 3 2 0 q321 0 0 q322 0 0 q323 0 1 3 0 0 q131 0 0 q132 0 0 q133 2 3 0 0 q231 0 0 q232 0 0 q233
3 3 0 0 q331 0 0 q332 0 0 q333
Nota-se que na matriz MTD existem alguns elementos que correspondem a transições irreais, isto é, transições que não podem ocorrer. Por exemplo, não é possível ir da linha definida por Xt−2 = 1 e Xt−1 = 2 para a coluna definida por Xt = 1 e Xt−1 = 1, bem como não é admissível ir da linha definida por Xt−2 = 1 e Xt−1 = 1 para a coluna definida por
Xt = 1 e Xt−1 = 2, pois não é concebível no instante Xt−1 estar no estado um e no estado dois ao mesmo tempo. Portanto, sempre que isso acontecer a probabilidade de transição será igual a zero e este elemento será denominado de zero estrutural.
Contudo, a matriz de transição MTD poderá ser reescrita de uma forma mais compacta excluindo os zeros estruturais. Esta forma de reescreve a matriz MTD é denominada por Pe-gram(1980) de colapso, podendo também ser chamada matriz de redução ou matriz reduzida do MTD. Esta forma reduzida será denotada por RMTD.
A forma reduzida da matriz de transição MTD corresponde a matriz seguinte,
Xt RMTD =
Xt−2 Xt−1 1 2 3
1 1 q111 q112 q113
2 1 q211 q212 q213
3 1 q311 q312 q313
1 2 q121 q122 q123
2 2 q221 q222 q223
3 2 q321 q322 q323
1 3 q131 q132 q133
2 3 q231 q232 q233
3 3 q331 q332 q333
3.3.1.1 Estruturas de Autocorrelação
As estruturas de autocorrelação do modelo descrito pela equação (3.22) apesar de não satisfazerem as equações de Yule-Walker,Raftery (1985a) mostra através dos Teoremas 3.1 e 3.2que toda distribuição bivariada satisfaz um sistema linear de equações similares às equações de Yule-Walker (para ver as demonstrações dos Teoremas consulte Raftery (1985a), Raftery (1985b)).
Teorema 3.1 Seja P(k) uma matriz m×m cujo elementos são definidos por,
pij(k) = P[Xt+k=i, Xt =j] (i, j = 1,· · · , m;k ∈Z) (3.27)
e P(0) =diag(π1,· · · , πm), em que(π1,· · · , πm)é a distribuição limite de primeira ordem
do processo. Logo, a distribuição bivariada de P(k) satisfaz o sistema de equações definido pela fórmula abaixo,
P(k) = l
X
i=1
λiQP(k−i) (3.28)
Corolário 3.1 Suponha que {Xt : t ∈ N} é uma variável aleatória estacionária definida por (3.22), suponha também que Yt é uma variável aleatória com distribuição Qχt, isto é, a distribuição condicional de Yt dado χt=x é igual a Qx, de modo que P[Yt=i|Xt=j] =qij. Seja a correlação entre Xt e Xt+k denotada por ρk =corr(Xt, Xt+k) e seja a correlação entre
Xte Yt+k denotada porρ˜kk =corr(Xt, Yt+k). Então as autocorrelações satisfazem um sistema de equações semelhantes às equações de Yule-Walker, desta forma,
ρk=
l
X
i=1
λiρ˜|k−i| (k ∈N) (3.29)
Teorema 3.2 As equações definidas por (3.28)só terão solução única se nos seguintes casos: 1. Se
l
= 2, (3.28) terá solução única se 0< λ1 ≤1.2. Se
l
= 3, (3.28) terá solução única se λi ≥0, i = 1, 2, 3 e se Q, tem pelo menos uma3. Se
l
≥4, (3.28) terá solução única se λi ≥0, i= 1,· · · ,l
e se(1−η1− · · · −ηm)(2−λ1−λl−1−λl)<1,
em que ηi =min{q1i,· · · , qmi}
3.3.1.2 Estruturas de Autocorrelação para Três Estados
Em Raftery (1985a) é verificado a estrutura de autocorrelação para o modelo de segunda ordem com três estados (m = 3), em que ele considerou o caso em que as probabilidades
marginais são iguais, isto é, π= 131. Contudo Raftery (1985b) afirma que os resultados serão
os mesmos para distribuições marginais com probabilidades diferentes. Para simplificar as expressões, o autor considerou somente o caso especial em que as probabilidades marginais são iguais e Q sendo construída de modo que as autocorrelações satisfarão um conjunto de equações de Yule Walker,
Q= 1
3(1− |α|)J+
(
αI, 0≤α≤1,
|α|E, −1≤α≤0, (3.30)
em que:
|α| ≤1,
J é uma matriz 3×3 de1′s,
J=
1 1 1 1 1 1 1 1 1
Ié a matriz identidade 3×3,
I=
1 0 0 0 1 0 0 0 1
E=
0 0 1 0 1 0 1 0 0
Em seguida, foi avaliado a variedade de autocorrelações que podem ser representadas pela equação (3.31) quando a ordem do modelo é igual a 2, ou seja,
l
= 2. Pela equação (3.29) tem-se que,(
ρ1 =φ1+φ2ρ1
ρ2 =φ1ρ1+φ2
(3.31)
em que φ1 =λ1α eφ2 =λ2α.
Seguindo Mena e Walker (2007), em geral a correlação de defasagem k dos modelos MTD estacionários pode ser calculada ao se adotar a propriedade de esperança linear empregada por Pitt, Chatfield e Walker(2002) conforme se segue abaixo,
r(k) =ρk =ρ1 l
X
i=1
λiρk−i, k≥
l
(3.32)com condições iniciais dadas por,
r(0) =ρ0 = 1 r(1) =ρ1 (3.33)
Ao combinar (3.31) com o conjunto de restrições (3.23),(3.24) e (3.28), Raftery (1985a) mostra que a região admissível para as autocorrelações dadas pelo modelo MTD é descrita por,
ρ1 ≥ − 1 2
ρ1 + ρ2 ≥0 (3.34)
ρ2 ≥
ρ1(1 + 3ρ1)
2 +ρ1
quando α≥0, e por,
−(1 + 2ρ1)≤ρ2 ≤ −ρ1
ρ2(1 + 2ρ1)≥2ρ1(1 +ρ1)−1 (3.35)
quando α <0, essas regiões são ilustradas pela Figura (3.1).
(a) (b)
Figura 3.1: Regiões admissíveis das autocorrelações para o modelo MTD de primeira e segunda ordem com três estados. (a) representa o caso em que α ≥ 0 e (b) representa o caso geral,
isto é, a união das duas regiões. Fonte: Raftery (1985a)
Com relação a Figura (3.1), percebe-se que, mesmo com todas as restrições feitas acerca dos parâmetros a região de admissão para o modelo MTD é quase tão grande quanto a região para um modelo AR(2).
3.4
Modelo GMTD
Seja {Xt :t ∈N}uma a sequência de variáveis aleatórias de uma série temporal tomando
valores em um espaço de estados arbitrário, então o modelo GMTD poderá ser escrito da seguinte maneira,
F(xt|xt−1) =
l
X
i=1
λiGi(xt|xt−l), (3.36)
em que F(xt|xt−1) é a função de distribuição acumulada condicional de Xt dado o seu
pas-sado que é representado por xt−1 = {x
t−1,· · · , xt−l}, o elemento Gi(xt|xt−l) é a função de distribuição acumulada condicional de Xt dada al-ésima defasagem.
garan-tir a não negatividade a cerca dos λ′s, bem como para assegurar que cada distribuição de
probabilidade da matriz de transição seja positiva. Restrições essas que são semelhantes às apresentadas para o MTD,
0≤F(xt|xt−1)≤1 (3.37)
λi ≥0 (3.38)
l
X
i=1
λi = 1 (3.39)
Le, Martin e Raftery (1996) propuseram uma especificação Gaussiana para o componente
Gi do modelo conforme descrita abaixo,
Gi(xt|xt−l) = Φ
xt−φixt−i
σi
(3.40)
Embora a distribuição condicional sejam misturas GaussianasLe, Martin e Raftery(1996), observaram que o modelo efetuado poderia representar comportamentos não Gaussianos. No mesmo artigo eles propuseram duas generalizações para o GMTD, a primeira introduz o termo de um processo AR(l) padrão,
F(xt|xt−1) =
l
X
i=1
λiΦ
xt−φixt−i
σi
+λ0Φ
xt−
Pl
i=1φ0ixt−i
σ0
!
(3.41)
Para a segunda generalização os autores incluem mais um componente independente que permitirá a modelagem específica de outliers,
F(xt|xt−1) =
l
X
i=1
λiΦ
xt−φixt−i
σi
+λ0Φ
xt−
Pl
i=1φ0ixt−i
σ0
!
+λl+1Φ
xt
σl+1
(3.42)
em que, Pl+1
i=0λi = 1 eσl+1 será grande, uma vez que mede a variabilidade do outlier.
O modelo GMTD é mais parcimonioso do que o MTD, uma vez que tem somente 4
l
+ 3 parâmetros independentes para serem estimados.Existem alguns problemas de "quase"não identificabilidade com o modelo GMTD (3.41). Um exemplo disso, será quando calcula-se a E(Yt|Yt−1), pois ela envolve a soma (φ0i +φi)
mas não envolverá φ0i ou φi separadamente, mesmo assim as somas (φ0i +φi) tendem a
localização e isso não é muito preciso. Entretanto, quando o objetivo for de previsão ou simulação, estes problemas não apresentam maiores dificuldades (LE; MARTIN; RAFTERY, 1996).
Os autores ainda afirmam que esses problemas de identificabilidade não surgirão com o modelo GMTD passeio aleatório, em razão desse modelo ser encontrado quando se define em (3.41),
φ1 =· · ·=φl = 1 l
X
i=1
φ0i = 1
(3.43)
e esse modelo terá apenas 3
l
+ 2 parâmetros independentes para serem estimados.3.4.1
Estacionariedade
Le, Martin e Raftery (1996) mostram a estacionariedade do modelo através do Teo-rema(3.3) e do Teorema(3.4).
Teorema 3.3 Uma condição necessária e suficiente para que o processo Xt seja estacionário na média é que as raízes z1,· · · , zl da equação,
1−
l
X
i=1
(λ0φ0i+λiφi)z−1 = 0 (3.44)
se encontrem dentro do círculo unitário.
As condições declaradas a seguir determinam a região em que o modelo GMTD é estrita-mente estacionário, ou seja, estacionário de primeira ordem, essas são definidas para o GMTD de segunda ordem e que não possui o componente autorregressivo, isto é,
l
= 2 e λ0 = 0 respectivamente,λ1φ1+λ2φ2 <1
Apesar dessas condições provirem de um processo com média zero, Le, Martin e Raftery (1996) dizem que existem várias maneiras de alterar o modelo GMTD a fim de que as condições de estacionariedade permaneçam as mesmas e a média continue sendo igual a zero. Uma delas é mostrada em seu artigo quando na equação (3.41) é adicionada a constante δ do modelo autorregressivo padrão de ordem p, AR(p),
F(xt|xt−1) =
l
X
i=1
λiΦ
xt−φixt−i
σi
+λ0Φ
xt−δ−
Pl
i=1φ0ixt−i
σ0
!
(3.46)
Ao contrário do modelo AR(2), o modelo GMTD requer mais uma condição para ser estacionário de segunda ordem. Essas condições são enunciadas por Le, Martin e Raftery (1996) no Teorema 3.4. Para esse teorema eles supõem que o processo Xt é estacionário na
média e queλ0 = 0, uma vez que se λ0 6= 0 as condições de segunda ordem e estacionariedade estrita são muito difíceis de demonstrar.
Teorema 3.4 Suponha que o processo Xt é definido por (3.36) e (3.40) com λ0 = 0 é
es-tacionário de primeira ordem, uma condição necessária e suficiente para que o processo seja estacionário de segunda ordem é que as raízes z1,· · · , zl da equação,
1−
l
X
i=1
λiφ2iz− i
= 0 (3.47)
se encontrem dentro do círculo unitário.
A região que define as condições de estacionariedade quando o processo é de segunda ordem é dado por
λ1φ21+λ2φ22 <1 (3.48)
Figura 3.2: Regiões de estacionariedade para o modelo GMTD de segunda ordem. Fonte: Le, Martin e Raftery (1996)
3.4.2
Estruturas de Autocorrelação
Como o GMTD tem origem no modelo MTD, as autocorrelações desse modelo também não irão satisfazer um sitema de equações de Yule-Walker, porém irão satisfazer um sistema de equações semelhantes às de Yule-Walker. Le, Martin e Raftery (1996) calculam essas autocorrelações quando λ0 = 0 e o modelo GMTD é de segunda ordem. Além disso, eles comparam a gama de possibilidades com as de um processo autoregressivo de segunda ordem, AR(2). SendoXtum processo de segunda ordem e estacionário e, sem perda de generalidade,
com média igual a zero. Se ρk denota a k-ésima autocorrelação, então,
E[XtXt−k] = E[E[XtXt−k|Xt−1]]
= E(Xt−k
l
X
i=1
(λ0φ0i +λiφi)Xt−i)
= X
i
(λ0φ0i+λiφi)E[Xt−kXt−i] (3.49)
desde que o processo seja estacionário e de segunda ordem segue que as autocorrelações do modelo GMTD satisfazem um sistema de equações semelhantes às equações de Yule-Walker, da seguinte forma,
ρk= X
i
para k = 1,· · · ,
l
.Ao substituir o coeficiente λ0φ0i+λiφi peloi-ésimo coeficiente de um processo
autoregres-sivo na equação (3.50), nota-se que ficará semelhante às equações de Yule-Walker para um processo autoregressivo de p-ésima ordem.
Para λ0 = 0 e
l
= 2, a equação (3.50) será expressa da seguinte maneiraρ1 =λ1φ1+λ2φ2ρ1 (3.51)
quando k = 1,
ρ2 =λ1φ1ρ1+λ2φ2 (3.52)
quando k = 2,
Seguindo Le, Martin e Raftery (1996), a região admissível para as correlações ρ1 e ρ2 definidas pelas equações (3.51) e (3.52), pode ser expressa da seguinte maneira,
λ21ρ41+ (−2λ21+λ1+ 1)ρ21−2ρ2ρ21+ (1−λ1)ρ22ρ21+λ1ρ22−λ1(1−λ1)<0 (3.53)
e o limite dessa região satisfaz a seguinte equação,
ρ2 =
ρ2 1±
p
λ2
1(1−λ1)(1−ρ21)3 (1−λ1)ρ21+λ1
(3.54)
Figura 3.3: Regiões admissíveis das autocorrelações para o modelo GMTD de segunda ordem e para o Modelo AR(2). A linha contínua indica o limite da gama de autocorrelações para o AR(2). Fonte: Le, Martin e Raftery(1996)
Percebe-se que mesmo quando λ0 = 0, em outras palavras, quando o componente autor-regressivo não está incluso no modelo GMTD, ainda há um conjunto vasto de possibilidades para ρ1 e ρ2, que é quase tão grande quanto para o modelo AR(2).
3.4.3
Esperança do Modelo GMTD
Desde que {Xt: t ∈N} seja uma sequência de variáveis aleatórias de uma série temporal
estacionária, pode-se verificar que a esperança do modelo GMTD é igual a zero. Uma forma de verificar este enunciado é desenvolvida em Le, Martin e Raftery(1996) e será apresentada a seguir (outra forma é exibida no Apêndice A).
Sendo µa média do processo Xt descrito pelo modelo (3.41), então
µt =E(Xt) = E(E(Xt|Xt−1,· · · , Xt−l))
= E
l
X
i=1
(λ0φ0i +λiφi)Xt−i !
(3.55)
Como o processo é dito ser estacionário a equação (3.55) decorre da seguinte maneira
E(Xt) =
l
X
i=1
(λ0φ0i+λiφi)E(Xt−i)
= l
X
i=1
Isolando o termo E(Xt) em (3.56)
E(Xt) −
l
X
i=1
(λ0φ0i+λiφi)E(Xt) = 0
E(Xt) 1−
l
X
i=1
(λ0φ0i+λiφi) !
= 0
E(Xt) = 0. (3.57)
Portanto, seguindo as conjecturas descritas acima, a E(Xt) = 0. Le, Martin e Raftery
(1996) baseando-se na distribuição marginal do modelo e nos conceitos de distribuição de posição e escala, desenvolve a E(X2
t), chegando na seguinte expressão (para detalhes ver
Apêndice B),
E(Xt2) = l
X
i=1
λiφ2E(Xt2−1)
| {z }
estacionário +
l
X
i=1
λiσi2, (3.58)
como é assegurada a estacionariedade do processo, tem-se que E(X2
t−1) = E(Xt2), em
con-sequência disso nesse trabalho foi expandido um pouco mais a expressão (3.58), e chegou-se a seguinte equação (que seu desenvolvimento pode ser vista na integra no Apêndice B).
E(Xt2) =
Pl
i=1λiσi2
1−Pli=1λiφ2
METODOLOGIA
Para que seja possível o uso dos gráficos modificados, e concomitantemente alcançar os objetivos apresentados, é indispensável ter em mãos uma sentença fechada da variância do processo, pelo fato dela ser a essência no desenvolvimento de expressões analíticas para esse tipo de gráfico de controle. Nesse sentido, foi preciso desenvolver tal expressão analítica para o modelo proposto ao ajuste.
Em consequência disso, o trabalho foi divido em três etapas: a primeira foi o desenvolvi-mento teórico da expressão da variância do modelo; a segunda decorre da primeira que é o desenvolvimento da variância da média, e a terceira foi a parte de simulação computacional. Esta última foi feita no software estatístico R Core Team (2013). Sendo então, dividido em
quatro seções em que, a Seção 4.1 aborda o desenvolvimento da variância do modelo, a Seção 4.2traz a variância da média amostral e a Seção4.3apresenta o desenvolvimento da simulação computacional.
4.1
Variância do Modelo GMTD
Na literatura ainda não existe uma expressão fechada para variância do modelo GMTD, sendo assim, nesse trabalho é desenvolvida essa nova expressão, seguindo as restrições impostas pelos autores do modelo. Tomando como base Ross(2010), verifica-se que V ar(Xt) pode ser
escrita da seguinte maneira,
V ar(Xt) =E(Xt2)−(E(Xt))2, (4.1)
com isso, o desenvolvimento da variância do modelo GMTD segue apoiado nas equações (3.57)
e (3.59) demonstradas em Le, Martin e Raftery (1996).
Como obtido em (3.57), a esperança do processo é igual a zero, isto é, E(Xt) = 0. Logo,
pela equação 4.1 é possível verificar que a variância do modelo GMTD é dada apenas pelo primeiro termo da equação seguinte,
V ar(Xt) =E(Xt2) + (0)
2 (4.2)
Desta forma, uma das contribuições desse trabalho é apresentada usando (3.59), mostrando que a variância do modelo GMTD é descrita da seguinte maneira,
V ar(Xt) = E(Xt2)
V ar(Xt) =
Pl
i=1λiσi2
1−Pli=1λiφ2i
(4.3)
Percebe-se que a expressão (4.3) depende apenas dos parâmetros do modelo, ou seja, não depende diretamente dos valores observados na amostra.
4.2
Variância da Média Amostral
Magalhães, Ho e Costa (2008) obtiveram a expressão da variância da média para o modelo AR(1). Nesse sentido, outra contribuição desse trabalho é dada quando a abordagem de Magalhães, Ho e Costa (2008) foi estendida de modo semelhante para o modelo GMTD, em que, pode-se mostrar que a expressão para V ar( ¯Xt), de modo geral, é calculada como (ver
detalhes no apêndices C),
V ar( ¯Xt) =
1
n2
(
V ar(Xt) "
n+ 2
n−1
X
i=1
(n−i)ρi !#)
. (4.4)
média amostral é igual a,
V ar( ¯Xt) =
1 42
(
V ar(Xt) "
4 + 2 3
X
i=1
(n−i)ρi !#)
V ar( ¯Xt) =
1
42 {V ar(Xt) [4 + 2 (3ρ1+ 2ρ2+ρ3)]} (4.5)
Conforme as fórmulas (3.32) e (3.33) o valor de ρ2 eρ3 poderão ser calculados conforme a descrito abaixo,
r(2) = ρ2 =φ1(λ1r(1) +λ2r(0)) (4.6)
r(3) = ρ3 =φ1(λ1r(2) +λ2r(1)) (4.7)
4.3
Simulação Computacional
Para iniciar a simulação, a princípio, definiu-se os parâmetros adotados para o modelo GMTD de segunda ordem que seguem as equações (3.36) e (3.40),
F(xt|xt−1) =λ1Φ
xt−φ1xt−1
σ1
+λ2Φ
xt−φ2xt−2
σ2
(4.8)
simplificando, definiu-se os valores assumidos por λ1, λ2, φ1, φ2, σ1 e σ2. Tais parâmetros foram selecionados da seguinte maneira: primeiramente defini-se os valores para os λ′s, por
consequência da restrição (3.39) nota-se que existe uma relação de dependência entre λ1 e
λ2, ou seja, λ2 = 1−λ1, por isso, para não sobrecarregar a rotina computacional, definiu-se somente λ1 como sendo o conjunto de nove valores a seguir,
λ1 ={0,1; 0,2; · · · ; 0,8; 0,9} (4.9)
no entanto, o conjunto suprimido correspondente a λ2, seguindo λ2 = 1−λ1, é o seguinte,
λ2 = 1−λ1 ={0,9; 0,8; · · · ; 0,2; 0,1} (4.10)
Afim de atender determinadas condições, é obedecido o Teorema (3.4) e com o auxílio da Figura (3.2), defini-se a região aceitável para φ1 e φ2 de modo a atingir a estacionariedade. Ao isolar tais parâmetros nas equações (3.51) e (3.52) definiu-se os valores para ρ1 e ρ2 de modo a atingir a unicidade das soluções das equações lineares semelhantes às equações de Yule-Walker. Portanto, definiu-se doze valores desses parâmetros como sendo,
φ1 e φ2 ∈ {−1; −0,9; · · · ; 0,5; 0,5; · · · ; 0,9; 1} (4.11)
e por último defini-se a escolha de σ1 e σ2, os autores não fazem nenhuma restrição dentre a gama de possibilidades desses parâmetros, então seguindo o exemplo simulado por Le, Martin e Raftery (1996), em que σ1 e σ2 eram iguais ao valor um, para esse trabalho, decidiu-se ampliar um pouco as possibilidades e tomou-se os seguintes valores para esses parâmetros,
σ1 e σ2 ∈ {1, 2, 3, 4, 5}. (4.12)
Assim, ao combinar todos os parâmetros e se aplicar os devidos filtros, para garantir as restrições impostas pelo modelo GMTD escolhido, foram formadas32.400configurações. Logo após se definir as configurações dos parâmetros calculou-se a variância do modelo, para isso utilizou-se a equação (4.3) aplicando todas as configurações.
Dos valores encontrados com o cálculo da variância do modelo, percebeu-se que, mesmo com os filtros estabelecidos, ainda assim obteve-se valores negativos para variância, bem como valores que tendem para infinito. Logo, foram selecionados apenas aqueles em que as confi-gurações forneciam variância estritamente maior que zero e menor que dez (o valor dez foi determinado prevendo que uma variância elevada fornece limites de controle muito largos). Da mesma forma, utilizando as equações (4.5), (4.6) e (4.7) calcula-se a variância da média amostral e aplicaram-se os mesmos filtros utilizados para o cálculo da variância do GMTD. Feito isso, a quantidade de configurações se reduz a 622 configurações. Esses valores foram
dispostos conforme a Tabela (4.1).
Configuração λ1 φ1 φ2 σ1 σ2 Var.gmtd Var.xbar 1 0,8 -0,6 0,5 1 1 1,51 1,98e-5 2 0,9 -0,6 0,6 1 1 1,48 3,54e-3
3 0,7 1 1 1 1 1,56 1,21e-2
... ... ... ... ... ... ... ... 622 0,8 0,7 0,6 1 1 1,86 1,09e0
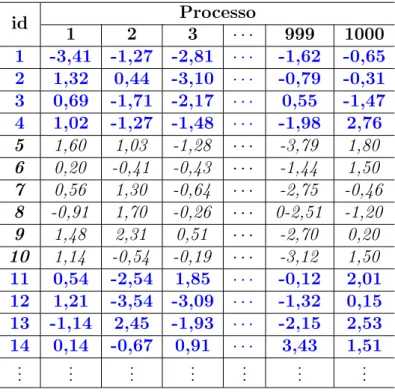
A partir da rotina, desenvolvida no R Core Team (2013) (software RStudio), para gerar números que seguem o modelo GMTD, foram criados processos, dos quais, em cada rodada da rotina em que eram modificadas as linhas das configurações dispostas na Tabela (4.1) gerou-se
622matrizes com8.000linhas e1.000colunas. Em cada uma das colunas dessas matrizes foram realizadas operações objetivando estruturar as amostras. Seguindo Montgomery(2004), para construir as amostras selecionou-se grupos de tamanho 4 com intervalos de tamanho 6 entre
cada grupo, nessa situação, foram gerados 800 subgrupos de tamanho 4, como exemplifica a
Tabela (5.1), em que, para o cálculo da média são tomados os valores com a formatação em negrito sendo desconsiderados os valores com a fonte no padrão itálico.
id 1 2 Processo3
· · · 999 1000
1 -3,41 -1,27 -2,81 · · · -1,62 -0,65 2 1,32 0,44 -3,10 · · · -0,79 -0,31 3 0,69 -1,71 -2,17 · · · 0,55 -1,47 4 1,02 -1,27 -1,48 · · · -1,98 2,76
5 1,60 1,03 -1,28 · · · -3,79 1,80
6 0,20 -0,41 -0,43 · · · -1,44 1,50
7 0,56 1,30 -0,64 · · · -2,75 -0,46
8 -0,91 1,70 -0,26 · · · 0-2,51 -1,20
9 1,48 2,31 0,51 · · · -2,70 0,20
10 1,14 -0,54 -0,19 · · · -3,12 1,50
11 0,54 -2,54 1,85 · · · -0,12 2,01 12 1,21 -3,54 -3,09 · · · -1,32 0,15 13 -1,14 2,45 -1,93 · · · -2,15 2,53 14 0,14 -0,67 0,91 · · · 3,43 1,51
... ... ... ... ... ... ... Tabela 4.2: Processos GMTD. Dados simulados.
Seguindo com o desenvolvimento da simulação, calculou-se a média de cada um dos 800
subgrupos para que sejam plotadas nos gráficos de controle. Para esse trabalho foram cons-truídos três tipos de gráficos de controle, nos quais, os limites de controle de cada gráfico foram desenvolvidos conforme as equações definidas em (2.2), (2.7) e (2.15), em que, a pri-meira equação representa os limites do gráfico de Shewhart clássico, a segunda os limites para o Shewhart AR(1) e a terceira para o gráfico de Shewhart modificado, desenvolvidos nesse trabalho quando o valor de k é igual a 3.