UNIVERSIDADEFEDERALDO RIO GRANDE DO NORTE
UNIVERSIDADEFEDERAL DORIOGRANDE DONORTE CENTRO DETECNOLOGIA
PROGRAMA DEPÓS-GRADUAÇÃO EMENGENHARIAELÉTRICA E DECOMPUTAÇÃO
Controlador Adaptativo por Posicionamento de
Pólos e Estrutura Variável Aplicado ao Controle
de Geradores Eólicos Baseados em Máquina de
Indução Duplamente Alimentada
Daniel Wanderley Honda
Orientador: Prof. Dr. Aldayr Dantas de Araujo
Dissertação de Mestrado apresentada ao
Programa de Pós-Graduação em Engenharia Elétrica e de Computação da UFRN (área de concentração: Automação e Sistemas) como parte dos requisitos para obtenção do título de Mestre em Engenharia Elétrica.
UFRN / Biblioteca Central Zila Mamede Catalogação da Publicação na Fonte Honda, Daniel Wanderley
Controlador adaptativo por posicionamento de pólos e estrutura variável aplicado ao controle de geradores eólicos baseados em máquina de indução duplamente alimentada / Daniel Wanderley Honda. – Natal, RN, 2013.
54 f.: il.
Orientador: Prof. Dr. Aldayr Dantas de Araujo.
Dissertação (Mestrado) – Universidade Federal do Rio Grande do Norte. Centro de Tecnologia. Programa de Pós-Graduação Engenharia Elétrica e da Computação.
1. Controlador Adaptativo por Posicionamento de Pólos e Estrutura Variável - Dissertação. 2. Gerador de Indução Duplamento Alimentado, - Dissertação. 3. Geração de Energia Eólica - Dissertação. I. Araujo, Aldayr Dantas de II. Universidade Federal do Rio Grande do Norte. III. Título.
Agradecimentos
Ao Deus SU pelas boas energias recebidas. Ao meus pais que sempre foram meu porto seguro.
Ao Professor Samaherni Morais Dias pelo imensurável suporte e incentivo na busca dos conhecimentos técnicos, como também pelo apoio moral.
Aos amigos Alessandro Rolim, Mariana Cremonini, Fernanda Palhano e Clarissa An-drade que me acompanharam e apoiaram nos momentos difíceis.
de robustez e desempenho foram realizados com incertezas nos parâmetros da máquina e variações de referência de velocidade.
Abstract
In the last decade, the renewable energy sources have present a major propulsion in the world due to several factors: political, environmental, financial and others. Within this context, we have in particular the energy obtained through wind, wind energy - that has highlighted with rapid growth in recent years, including in Brazil, mostly in the Northeast, due to it’s benefit-cost between the ’clean’ energies. In this context, we propose to com-pare the variable structure adaptive pole placement control (VS-APPC) with a traditional control technique proportional integral controller (PI), applied to set the control of ma-chine side in a conversion system using a wind generator based on Double-Fed Induction Generator (DFIG). Robustness and performance tests were carried out to the uncertainties of the internal parameters of the machine and variations of speed reference.
2.2.1 Modelagem do DFIG . . . 15
2.2.2 Controle do Conversor do Lado da Máquina . . . 16
2.2.3 Potências Ativa e Reativa . . . 19
2.2.4 Torque Eletromagnético . . . 19
2.3 Estratégia de Controle Clássica . . . 19
3 VS-APPC 22 3.1 Descrição do Método . . . 22
3.2 Cálculo dos Parâmetros do Controlador . . . 23
4 Projeto dos Controladores 25 4.1 PI . . . 25
4.2 VS-APPC . . . 26
5 Resultados de Simulação 28 5.1 Regime Permanente . . . 28
5.2 Avaliação de Robustez e Desempenho . . . 29
6 Conclusão e Perspectivas 37
Referências Bibliográficas 38
A Parâmetros do Sistema de Conversão Eólica 41
B Parâmetros de Simulação e Inicialização 42
C Transformadadq0 43
Lista de Figuras
1.1 Capacidade total instalada até o final de Junho de 2011 [MW]. Fonte: WWEA . 2
1.2 Matriz Elétrica Brasileira. Fonte: ANEEL/ABEEólica. . . 3
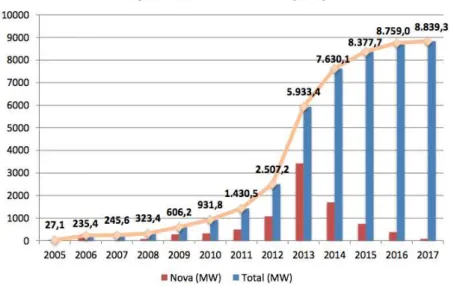
1.3 Evolução da Capacidade Instalada no Brasil (Fonte: ANEEL/ABEEólica). . . . 3
1.4 Turbina eólica de velocidade fixa conectada à rede com um gerador de indução tipo gaiola de esquilo.. . . 4
1.5 Gerador Síncrono de Rotor Bobinado. . . 4
1.6 Gerador Síncrono de Imã Permanente. . . 5
1.7 Gerador de Indução em Gaiola de Esquilo.. . . 5
1.8 Gerador de Indução Duplamente Alimentado- DFIG.. . . 6
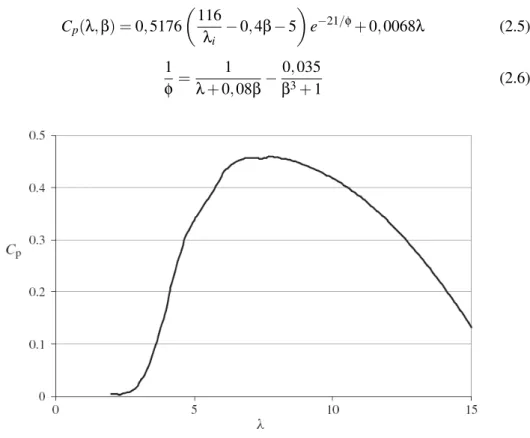
2.1 Ilustração doCp(λ). Fonte: Fernando D. Bianchi (2006) . . . 9
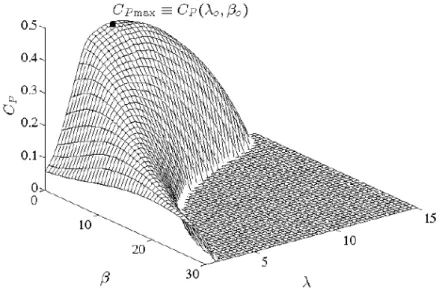
2.2 Ilustração doCp(λ,β). Fonte: Fernando D. Bianchi (2006) . . . 10
2.3 (a) Eixo vertical (b) eixo horizontal. Fonte: Spera (June, 2009) . . . 11
2.4 Direção do vento para turbinasupwindedownwind. Fonte: Soliman et al. (2011) 12 2.5 Principais componentes da turbina eólica de eixo horizontal. Adaptado de: Pao & Johnson (2011). . . 13
2.6 O princípio de funcionamento do DFIG. . . 14
2.7 Orientação pelo fluxo de estator.. . . 16
2.8 Estratégia clássica de controle com PI para o DFIG. . . 20
4.1 Malhas de controle das correntes do rotoriadrei a qr. . . 25
4.2 Malha de controle da velocidade. . . 26
4.3 Malha de controle da potência reativa do estator. . . 26
5.1 Velocidade mecânica. . . 29
5.2 Componentedda corrente do rotor-idr . . . 30
5.3 Componenteqda corrente do rotor-iqr . . . 30
5.4 Componentedda corrente do estator-ids. . . 31
5.5 Componenteqda corrente do estator-iqs . . . 31
5.6 Potência Reativa . . . 32
5.7 Potência Ativa . . . 32
5.8 Velocidade mecânica. . . 33
5.9 Componentedda corrente do rotor-idr . . . 34
5.10 Componenteqda corrente do rotor-iqr . . . 34
5.11 Componentedda corrente do estator-ids. . . 35
5.12 Componenteqda corrente do estator-iqs . . . 35
5.13 Potência Reativa . . . 36
Lista de Símbolos e Abreviaturas
ABEElica Associação Brasileira de Energia Eólica ANEEL Agência Nacional de Energia Elétrica
A∗(s) Polinômio escolhido de acordo com os polos desejados em malha fechada
Cp Coeficiente de potência ou Coeficiente de desempenho
DFIG Doubly-Fed Induction Generator
Dt Constante de amortecimento do sistema concentrado no eixo do gerador
HG Constante de inércia do gerador
HT Constante de inércia total concentrada (Turbina Eólica + Gerador Elétrico)
Ht Constante de inércia da turbina
Lm Indutância mútua
Lr Indutância própria do rotor
Ls Indutância própria do estator
Llr Indutância de dispersão do rotor
Lls Indutância de dispersão do estator
Pr Potência Ativa do Rotor
Ps Potência Ativa do Estator
Rs,Rr Resistências dos enrolamentos do rotor e do estator
T SR Tip Speed Ratio
Te Conjugado eletromagnético desenvolvido pela máquina
Tm Conjugado mecânico aplicado no eixo do rotor
WW EA World Wind Energy Association
β Ângulo de passo
iads Corrente d do estator no referencial do fluxo estatórico iqr Corrente do eixo de quadratura do rotor
iaqr Corrente q do rotor no referencial do fluxo estatórico iqs Corrente do eixo de quadratura do estator
ia
qs Corrente q do estator no referencial do fluxo estatórico
p Número de pares de polos v Velocidade do vento vsevr Tensões do estator e do rotor
vadr Tensãoddo rotor no referencial do fluxo estatórico vads Tensãoddo estator no referencial do fluxo estatórico vaqr Tensãoqdo rotor no referencial do fluxo estatórico va
qs Tensãoqdo estator no referencial do fluxo estatórico
Capítulo 1
Introdução
Na última década, as fontes de energias renováveis obtiveram um grande destaque em todo o mundo devido aos mais diversos fatores: políticos, ambientais, financeiros, entre outros. Dentro deste universo, em destaque, existe a energia eólica que é obtida através do vento e tem se destacado com um crescimento vertiginoso nos últimos anos. De acordo com a WWEA1a capacidade instalada global das turbinas eólicas vem aumentando 27% por ano desde 2005. Segundo o relatório semestral da WWEA em 2011, os cinco países com maior instalação de turbinas eólicas são: China, USA, Alemanha, Espanha e Índia. Esses países representam 74% do montante global. De acordo com a Figura (1.1), a China lidera o mercado eólico mundial, obtendo um aumento de 8.000 MW em sua capacidade de geração em energia eólica no primeiro semestre de 2011, totalizando assim 52.000 MW. Na Europa, a Alemanha lidera o mercado, alcançando 27.981 MW. Em seguida temos: Espanha, 21.150 MW; Itália, 6.200 MW; França, 6.060 MW; Reino Unido, 5.707 MW e Portugal com 3.960 MW.
Atualmente, a principal fonte de energia no Brasil é a hidráulica, ocupando 68% da matriz energética (ver Figura (1.2)), segundo a Associação Brasileira de Energia Eólica-ABEEólica e ANEEL- Agência Nacional de Energia Elétrica. Mesmo sendo uma fonte de energia renovável, sua disponibilidade é diretamente ligada às chuvas, além de causar grandes impactos ambientais devido à inundação de uma grande área para armazenamento de água. Devido às favoráveis condições do vento (velocidade média, direção, entre ou-tras) em algumas regiões do Brasil, com destaque para o Nordeste, a energia eólica se expande cada vez mais. Em 2010 a geração atingiu a marca de 2.176,6 GWh. Isto repre-senta um aumento, em relação ao ano anterior, de 75,8%, quando se alcançou 1.238 GWh. Neste mesmo ano, a potência instalada para geração eólica no país aumentou 54,1%. De acordo com o Banco de Informações da Geração (BIG), da Agência Nacional de Energia Elétrica (ANEEL), o parque eólico nacional cresceu 326 MW, alcançando 928 MW ao fi-nal de 2010, em decorrência da inauguração de catorze parques eólicos. Dentre os novos parques eólicos, destacam-se quatro com potência instalada superior a 40 MW:Volta do
Rio,Bons VentoseCanoa Quebrada(respectivamente 42 MW, 50 MW e 57 MW, todos
no Ceará), além do empreendimentoAlegria I (51 MW, no Rio Grande do Norte)2.
Segundo o boletim mensal de dados do setor eólico referente ao mês de Junho de
Figura 1.1:Capacidade total instalada até o final de Junho de 2011 [MW]. Fonte: WWEA
2013, disponibilizado pela Associação Brasileira de Energia Eólica-ABEEólica, o Rio Grande do Norte é o estado que possui o maior número de parques eólicos instalados, totalizando 727,2 MW de potência instalada. O estado lidera também na quantidade de parques eólicos em construção com 44 unidades, representando 1212,1 MW dos 3.368 MW da potência em construção no país.
Na Figura (1.3), pode-se observar a evolução da capacidade instalada da fonte eólica no Brasil e a previsão de crescimento em função das contratações já realizadas nos leilões regulados e no mercado livre, confirmando que o país se encontra em plena expansão da sua capacidade instalada de fonte eólica. Este cenário de expansão da energia eólica do Rio Grande do Norte e do Brasil, é um dos principais motivadores deste trabalho.
1.1
Tecnologias para Turbinas Eólicas
As tecnologias para turbinas eólicas dependem da velocidade do eixo do gerador, clas-sificadas como: velocidade fixa ou variável; do tipo de gerador: síncronos ou assíncronos e do uso de conversores de potência [James F. Manwell 2010].
Nos sistemas comvelocidade fixa- em que a rotação do rotor do gerador é mantida
pela rede elétrica- o gerador é ligado diretamente à rede elétrica, sem o uso de conversores, ver Figura (1.4). Esses sistemas têm como principais desvantagens a limitada eficiência aerodinâmica, frequente manutenção da caixa de transmissão e a compensação da ener-gia reativa através da instalação de um banco de capacitores. A vantagem está no custo relativamente baixo e a robustez [Ullah 2006].
Já nos sistemas de velocidade variável, a rotação do rotor do gerador é desacoplada
CAPÍTULO 1. INTRODUÇÃO 3
Figura 1.2:Matriz Elétrica Brasileira. Fonte: ANEEL/ABEEólica.
Figura 1.3:Evolução da Capacidade Instalada no Brasil (Fonte: ANEEL/ABEEólica)
Figura 1.4: Turbina eólica de velocidade fixa conectada à rede com um gerador de indução tipo gaiola de esquilo.
a regulação automática da tensão. Já o gerador síncrono a imã permanente tem uma eficiência elevada- dependendo do torque mecânico e da velocidade aplicados- devido à ausência das perdas nos enrolamentos do rotor, mas, segundo Nunes (2003), apresentam problemas com a regulação de tensão.
Figura 1.5:Gerador Síncrono de Rotor Bobinado.
Ambos os geradores síncronos trabalham a baixas velocidades de rotação (gerador multipolos), diretamente acoplados ao rotor da turbina eólica, dispensando o uso da caixa de engrenagens, e consequentemente reduzindo a manutenção do sistema. Porém, a des-vantagem destes sistemas encontra-se na utilização de um conversor estático de potência idêntico à potência do gerador elétrico, processando toda a energia proveniente do estator, tornando-se assim uma solução de custo elevado.
CAPÍTULO 1. INTRODUÇÃO 5
Figura 1.6:Gerador Síncrono de Imã Permanente.
A Figura (1.7) ilustra a configuração do gerador de indução tipo gaiola de esquilo, em que o enrolamento do estator é conectado à máquina através do conversor estático de potência. Essa configuração é bastante aceita na indústria eólica, pois é extremamente robusta, econômica e segura. Porém, possui um custo elevado devido à utilização de um conversor pleno e caixa de engrenagem, acarretando maiores perdas elétricas e mecânicas [Costa 2010].
Figura 1.7:Gerador de Indução em Gaiola de Esquilo.
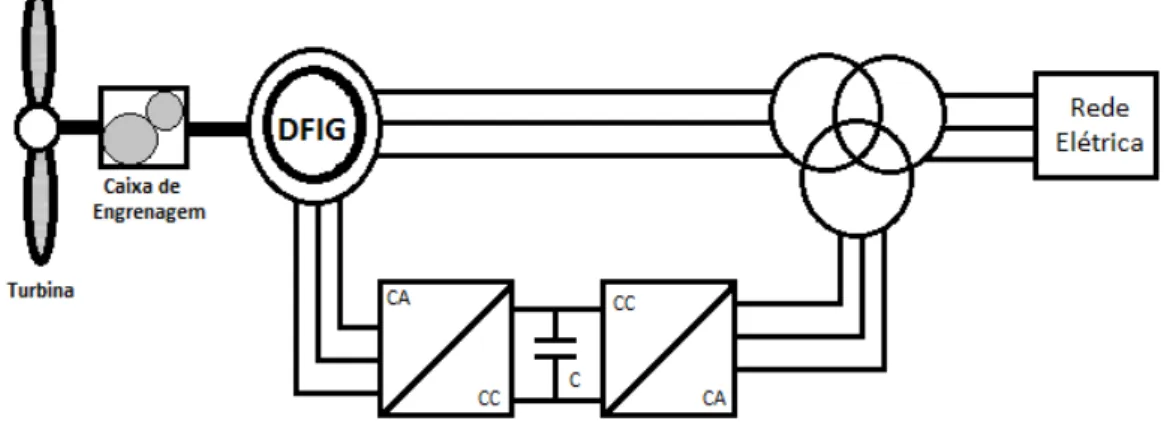
A tecnologia que adota o gerador de indução duplamente alimentado (Doubly-Fed
Induction Generator - DFIG) é mostrada na Figura (1.8). Esse gerador é uma máquina
de indução com os enrolamentos do rotor bobinado. Nesta tecnologia, os conversores de frequência são conectados entre si através de um elo CC, sendo um deles conectado aos enrolamentos do rotor e o outro à rede.
As principais vantagens do DFIG para os sistemas de conversão de energia eólica (SCEE) é a possibilidade de trabalhar com velocidade variável em frequência fixa, ter o controle independente da potência ativa e reativa, além da conexão direta do estator à rede elétrica com o rotor alimentado por um conversorback-to-back, que proporciona uma
redução do custo do conversor em relação às outras tecnologias, uma vez que o fluxo de potência que passa pelo conversor representa entre 20% e 30% da potência total [Muller et al. 2002]. Segundo Cardenas et al. (2013) a tecnologia que adota o gerador de indução duplamente alimentado (Doubly-Fed Induction Generator - DFIG) ocupa quase 50% do
mercado atual de energia eólica, além de possuir, na escala de 1,5-3 MW, 93 tipos de DFIGs aplicados aos sistemas eólicos de conversão de energia.
Figura 1.8:Gerador de Indução Duplamente Alimentado- DFIG.
Nesta dissertação, dentre as tecnologias para energia eólica apresentadas, optou-se pela tecnologia que utiliza o gerador de indução duplamente alimentado, a qual será de-talhada no decorrer da dissertação.
O DFIG aplicado ao sistema de conversão de energia eólica vem sendo objeto de estudo na comunidade acadêmica há alguns anos. Em Muller et al. (2002) é feita uma comparação entre as turbinas eólicas de velocidade fixa e variável, em que a de velocidade variável se torna mais vantajosa para potências superiores a 1 MW.
Lei et al. (2013) salienta que a tendência das turbinas eólicas é de serem instaladas
offshore, necessitando uma maior confiabilidade e maiores turbinas com o intuito de
mini-mizar os custos. Um modelo completo do DFIG é apresentado, como também a interação dos sistemas de controle da turbina eólica com os do DFIG. O modelo pode ser utilizado para avaliar o comportamento do sistema para diferentes modos de operação, esquemas de controle e integração com a rede elétrica.
A dissertação de mestrado de Marques (2004) aborda os principais conceitos e con-figurações utilizados em turbinas eólicas conectadas à rede elétrica, bem como a análise, o projeto e a implementação do sistema de controle para o DFIG. Devido ao controle ve-torial do DFIG, as oscilações do fluxo estatórico são pouco amortecidas. Com o intuito de estudar esse problema, é apresentada como solução uma análise do impacto da banda passante dos controladores de corrente, nos modos de oscilações do fluxo estatórico que surgem próximos à frequência da rede elétrica.
O controlador Proporcional Integral (PI) é largamente utilizado na indústria eólica, por se tratar de uma técnica de simples implementação e de bons resultados. Porém, o ajuste dos seus parâmetros por tentativa e erro não é uma tarefa trivial, e necessita do conhecimento do comportamento dinâmico do sistema eólico [Barros 2006]. Diversas técnicas foram propostas na literatura para substituir ou melhorar a sintonia dos PIs.
Capítulo 2
Sistema de Conversão de Energia
Eólica-SCEE
2.1
Modelo da Turbina Eólica
As turbinas eólicas são dispositivos mecânicos especificamente projetados para con-verter parte da energia cinética do vento, que passa através da área de cobertura das héli-ces, em energia mecânica útil. A potência contida no fluxo de ar é definido pela Equação (2.1),[Tony Burton & Bossanyi 2001].
Par= 1 2ρAv
3 (2.1)
ρ=densidade do ar(aproximadamente1,225kgm−3)
A=área de cobertura das hélices,m2 v=velocidade do vento,m/s
Embora a Equação (2.1) forneça a potência disponível do vento, a potência transferida para a turbina,Pt, é limitada pelo coeficiente de potência,Cp
Cp= Pt Par
(2.2)
Pt=CpPar=Cp· 1 2ρAv
3 (2.3)
Cptem uma limitação teórica definida como o limite de Betz, em que a turbina não pode extrair mais do que 59,3% da potência fornecida pelo vento. Na realidade, com a atual tecnologia, as turbinas eólicas atingem no máximo 45% da potência disponível do vento. Define-se também a relação entre a velocidade de ponta das pás pela velocidade do vento, denominadatip speed ratio(TSR)
λ=ωrR
D. Bianchi 2006].
As curvas que relacionam oCp(λ,β)são obtidas experimentalmente e fornecidas pelo fabricante da turbina eólica através de testes realizados em túneis de vento, podendo ser obtidas através de um modelo matemático. Adota-se neste trabalho as funções não linea-res, equações (2.5-2.6), obtidas em Muhando et al. (2007).
Cp(λ,β) =0,5176
✓
116
λi −0,4β−5
◆
e−21/φ+0,0068λ (2.5) 1
φ = 1 λ+0,08β−
0,035
β3+1 (2.6)
Figura 2.1: Ilustração doCp(λ). Fonte: Fernando D. Bianchi (2006)
CAPÍTULO 2. SISTEMA DE CONVERSÃO DE ENERGIA EÓLICA-SCEE 10
Figura 2.2:Ilustração doCp(λ,β). Fonte: Fernando D. Bianchi (2006)
Tm= Pt
ωr (2.7)
Substituindo (2.3) em (2.7), obtém-se
Tm= Pt
ωr =
Cp(λ,β) λ ρπR
3v2 (2.8)
O acoplamento mecânico entre a turbina eólica e o gerador, com o conceito de massa global [James F. Manwell 2010], pode ser representado por:
dωr dt =
1 2HT
(Tm−Te−Dtωr), (2.9) sendo Tm o conjugado mecânico aplicado no eixo do rotor em (N.m), Te o conjugado eletromagnético desenvolvido pela máquina em (N.m),ωra velocidade mecânica da má-quina em (rad/s), Dt a constante de amortecimento do sistema concentrado no eixo do gerador eHT a constante de inércia total concentrada do sistema eólico, definida por:
HT =Ht+HG, (2.10)
em queHteHGsão as constantes de inércia da turbina e do gerador, respectivamente. Diversos projetos de turbinas foram desenvolvidos ao longo dos tempos e a maioria deles compreende um rotor que gira através de forças de sustentação ou arraste, resultado de suas interações com o vento. Dependendo da posição do eixo do rotor, as turbinas eólicas são classificadas em eixo vertical ou horizontal, Figura (2.3), [Spera June, 2009].
de-Figura 2.3:(a) Eixo vertical (b) eixo horizontal. Fonte: Spera (June, 2009)
As turbinas eólicas de eixo horizontal podem ser classificadas, de acordo com a po-sição do rotor em relação à torre, em upwind e downwind, Figura (2.4). Nas turbinas downwindo vento incide na área de varredura do rotor por trás da turbina eólica. Uma vantagem desta configuração é o fato de não necessitarem de um mecanismo para dire-cionamento da turbina em relação ao vento, mas, todavia, esta configuração gera ruí-dos audíveis que dificultam a autorização e a aceitação deste tipo de turbina [James F. Manwell 2010]. Com relação ao número de pás, as turbinas eólicas comerciais apre-sentam na sua maioria 3 pás. Essa configuração apresenta uma melhor distribuição do peso sobre a área de varredura do rotor, são dinamicamente mais estáveis e reduzem as cargas mecânicas nos componentes da turbina.
Os principais componentes da turbina eólica de eixo horizontal, que são visíveis pelo lado exterior, são: a torre, a nacele e o rotor, Figura (2.5). A nacele abriga o gerador que está conectado ao eixo de alta velocidade, o qual - normalmente - é conectado a uma caixa de engrenagem, sendo responsável por elevar a velocidade rotacional entre os eixos de baixa e alta rotação. O eixo de baixa velocidade é conectado ao rotor, o qual inclui os suportes para as pás que capturam a energia cinética do vento e a transformam em energia cinética rotacional para a turbina eólica. A seguir, um breve detalhamento dos componen-tes da turbina eólica de eixo horizontal, Figura (2.5).
Anemômetro: Aparelho destinado a medir a velocidade do vento.
CAPÍTULO 2. SISTEMA DE CONVERSÃO DE ENERGIA EÓLICA-SCEE 12
Figura 2.4:Direção do vento para turbinasupwindedownwind. Fonte: Soliman et al. (2011)
sistema auxiliar (o principal é o aerodinâmico) para parar a turbina em condições adversas de operação.
Caixa de engrenagem: Conecta o eixo de baixa velocidade com o eixo de alta velocidade aumentando a velocidade rotacional. Existem configurações que não a utilizam, devido a utilização de geradores síncronos.
Medidor de direção do vento: Aparelho destinado a indicar a direção do vento.
Mecanismo de orientação direcional: TurbinasUpwind operam com o rotor de frente para o vento. Este dispositivo é utilizado para manter o rotor de frente para o vento quando ocorrem alterações em sua direção.
Figura 2.5: Principais componentes da turbina eólica de eixo horizontal. Adaptado de: Pao & Johnson (2011)
interesse comercial nesta área, estas desvantagens estão cada vez mais sendo reduzidas.
2.2
Gerador de Indução Duplamente Alimentado- DFIG
O gerador de indução com dupla alimentação é uma máquina de indução com o rotor bobinado. A típica configuração do sistema de geração eólica utilizando o DFIG consiste na ligação direta do estator à rede elétrica e o rotor alimentado através de dois conversores (IGBT)back-to-back. Esta configuração possui três modos de funcionamento para a ve-locidade da máquina: sub-síncrona, síncrona e supersíncrona [A. D. Hansen et al. 2003].
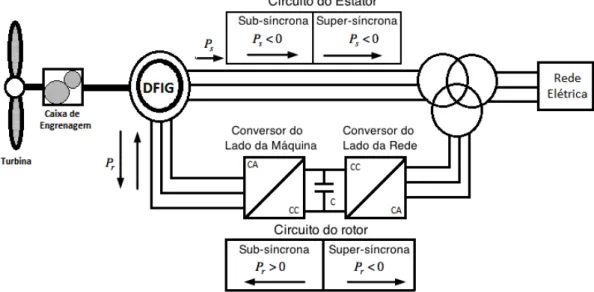
O princípio de funcionamento do DFIG é ilustrado através da Figura 2.6. Adotou-se o sentido positivo para o consumo de energia e negativo para o fornecimento. O estator da máquina fornece potência elétrica à rede, já o rotor, através de um conversor de potência bidirecional, pode fornecê-la ou consumi-la. Dessa maneira, em todos os três modos de funcionamento é possível gerar energia para a rede.
CAPÍTULO 2. SISTEMA DE CONVERSÃO DE ENERGIA EÓLICA-SCEE 14
Figura 2.6:O princípio de funcionamento do DFIG.
s=ωs−ωr
ωs , (2.11)
em queωsé a velocidade síncrona eωra velocidade do rotor.
Para um escorregamento negativo (s<0) a máquina trabalha na velocidade supersín-crona e a potência será fornecida à rede simultaneamente pelo rotor através dos conver-sores e pelo estator. Assim, (Pr<0) indica o fornecimento de potência ativa para a rede. Porém, quando a máquina encontra-se na velocidade subsíncrona (s>0), o fluxo de potên-cia será da rede para o rotor. Deste modo (Pr>0) indica que o rotor consome potência ativa da rede. Tanto na velocidade supersíncrona quanto na subsíncrona, o estator fornece potência ativa à rede elétrica [A. D. Hansen et al. 2003] e [Oliveira 2009] .
As potências mecânicas do rotor e do estator, desprezando as perdas, se relacionam da seguinte maneira[A. D. Hansen et al. 2003]:
Pr=−sPs, (2.12)
Pm=Ps(1−s). (2.13) Desprezando as perdas e considerando a máquina em regime permanente, a potência total gerada e entregue à rede é dada por:
PT =Ps+Pr. (2.14)
vs2=Rsis2+
dλs2
dt , (2.16)
vs3=Rsis3+
dλs3
dt , (2.17)
vr1=Rrir1+
dλr1
dt , (2.18)
vr2=Rrir2+
dλr2
dt , (2.19)
vr3=Rrir3+dλr3
dt . (2.20)
As equações (2.15-2.20) podem ser representadas no sistema de coordenadasdq(dé o eixo direto e qo eixo em quadratura), que no referencial síncrono podem ser escritas como
vds=Rsids−ωsλqs+ dλds
dt , (2.21)
vqs=Rsiqs+ωsλds+ dλqs
dt , (2.22)
vdr=Rridr−ωslλqr+ dλdr
dt , (2.23)
vqr=Rriqr+ωslλdr+ dλqr
dt , (2.24)
em queωslé a frequência angular de escorregamento, definida como
ωsl=ωs−ωr= dθsl
dt . (2.25)
As equações dos fluxos magnéticos do estator e rotor podem ser escritas em função das indutâncias e correntes do rotor e estator como
CAPÍTULO 2. SISTEMA DE CONVERSÃO DE ENERGIA EÓLICA-SCEE 16
λqs=Lsiqs+Lmiqr, (2.27) λdr=Lridr+Lmids, (2.28) λqr=Lriqr+Lmiqs, (2.29) em queLs=Lls+LmeLr=Llr+Lm.
Substituindo (2.28) em (2.23) e (2.29) em (2.24), obtém-se
vdr=Rridr−ωslλqr+ didr
dt (Llr+Lm) +Lm dids
dt (2.30)
vqr=Rriqr+ωslλdr+ diqr
dt (Llr+Lm) +Lm diqs
dt (2.31)
Manipulando as equações (2.26), (2.21), (2.27) e (2.22), obtém-se
vds=Rsids−ωsλqs+dids
dt (Lls+Lm) +Lm didr
dt (2.32)
vqs=Rsiqs+ωsλds+ diqs
dt (Lls+Lm) +Lm diqr
dt (2.33)
2.2.2
Controle do Conversor do Lado da Máquina
Aplicou-se a técnica do controle vetorial orientado pelo campo a partir do fluxo do estator para o controle do conversor do lado da máquina. O diagrama vetorial das variáveis da máquina de indução e os ângulos utilizados no controle estão mostrados conforme a Figura 2.7.
1996], tem-se
dλa ds dt =
dλaqs
dt =0, (2.35)
e, encontra-se a partir das equações (2.21) e (2.22)
vads=0, (2.36)
vaqs=λadsωs. (2.37) A partir das equações (2.26) e (2.27), pode-se representar as correntes do estator nos eixos direto e quadratura na referência do estator, respectivamente
iads=λs−Lmi
a dr
Ls , (2.38)
iaqs=−Lmi
a qr Ls
. (2.39)
Fazendo as substituições das equações (2.38) e (2.39) em (2.28), obtém-se
λadr= ✓
Lr− L2m
Ls
◆
iadr+Lm
Ls
λs, (2.40)
λaqr= ✓
Lr− L2m
Ls
◆
iaqr. (2.41)
Substituindo as equações (2.41), (2.35) e (2.40) em (2.23) obtém-se
vadr=Rriadr−ωslLr
✓
1− L 2
m LsLr
◆
iaqr+Lr
✓
1− L 2
m LsLr
◆
diadr
dt . (2.42)
CAPÍTULO 2. SISTEMA DE CONVERSÃO DE ENERGIA EÓLICA-SCEE 18
vaqr=Rriaqr+ωslLr
✓
1− L 2
m LsLr
◆
iadr+ωsl
✓
Lm Ls
λs
◆ +Lr
✓
1− L 2
m LsLr
◆dia
qr
dt . (2.43)
Definindoσ=⇣1− L
2 m LsLr
⌘
como o fator de dispersão da máquina, obtém-se as equa-ções que representam as tensões nos eixos direto e quadratura do rotor no referencial do fluxo do estator
vadr=Rriadr−ωslLrσiaqr+Lrσ diadr
dt . (2.44)
vaqr=Rriqra +ωslLrσiadr+ωsl
✓
Lm Ls
λs
◆
+Lrσdi a qr
dt . (2.45)
As Equações (2.44) e (2.45) serão utilizadas para o projeto da malha interna de con-trole das correntes do rotor. Observa-se, entretanto, que existe um acoplamento entre duas malhas de corrente, com grandezas de eixodinterferindo em grandezas de eixoqe vice-versa. Como o acoplamento entre as malhas das correntes do rotor é proporcional ao escorregamento, é comum compensá-las por sinais diretos (vdrcompevqrcomp) nas saídas dos controladores das correntes, para o desacoplamento dos controles das correntesiadr e iaqr[Silva 2006], ou seja
vadr0 =Rriadr+Lrσ diadr
dt , (2.46)
vaqr0 =Rriaqr+Lrσ diaqr
dt . (2.47)
As tensões de referência que acionam o conversor do lado da máquina são dadas como
va⇤ dr =va
0
dr−ωslLrσiaqr, (2.48)
va⇤qr=vaqr0+ωsl
✓
Lm Ls
λs
◆
+ωslLrσiadr, (2.49) em que os termos de compensação são
vdrcomp=−ωslLrσiaqr, (2.50) vqrcomp=ωsl
✓
Lm Ls
λs
◆
+ωslLrσiadr, (2.51) As funções de transferência das malhas de correntes do rotor são obtidas aplicando a transformada de Laplace em (2.46) e (2.47), dadas por
Idr(s) = 1 sσLr+Rr
Qs=
2 vqsids−vdsiqs . (2.55) Considerando os termos desprezados anteriormente na subseção 2.2.2, resistência e transitórios do estator, e substituindo as equações (2.38),(2.39), (2.36) e (2.37) em (2.54 e 2.55), tem-se
Ps=− 3 2
Lmλsωs Ls
iaqr, (2.56)
Qs= 3 2
λ2
sωs Ls −
3 2
ωsλsLm Ls
iadr. (2.57)
Segundo as equações acima, (2.56) e (2.57), salienta-se que a potência ativa é dire-tamente proporcional à componente do eixo em quadratura da corrente do rotor iaqr e a potência reativa à componente do eixo direto da corrente do rotoriadr.
2.2.4
Torque Eletromagnético
O torque eletromagnético da máquina é definido como
Te= 3 2 ⇣p 2 ⌘ %
λdsiqs−λqsids
&
, (2.58)
em quepé o número de pares de pólos da máquina. Como o fluxo magnético do estator no eixo de quadratura é nulo, equação (2.34), e substituindo (2.39) em (2.58), obtém-se
Te=− 3 2
⇣p
2
⌘Lm
Lsλsi a
qr. (2.59)
Salienta-se que o torque elétrico é uma função diretamente proporcional à componente do eixo em quadratura da corrente do rotoriaqr.
2.3
Estratégia de Controle Clássica
CAPÍTULO 2. SISTEMA DE CONVERSÃO DE ENERGIA EÓLICA-SCEE 20
Figura 2.8:Estratégia clássica de controle com PI para o DFIG.
O controle do conversor do lado da máquina tem como função o controle da velo-cidade da máquina, possibilitando a operação da turbina eólica em máximo rendimento, sendo definida a partir de medições da velocidade do vento [Barros 2006]. Uma outra função é o controle da potência reativa que o estator troca com a rede elétrica.
A entrada do controladorPI1 é o sinal do erro da potência reativa do estator. Esse
controlador fornece o valor de referência da corrente do rotor do eixo ia⇤
dr. De maneira semelhante, o erro da corrente do eixo direto é processado pelo controladorPI2obtendo
como saída o sinal v0dr. Esse sinal será somado ao termo %−ωslLrσia qr
&
, resultando na tensão de referência do eixo diretova⇤
dr.
A entrada do controladorPI3é o sinal de erro da malha externa de velocidade, que gera
em sua saída a referência da malha interna da corrente do rotor do eixo em quadraturaia⇤ qr. OPI4processa o sinal de erro da corrente em quadratura, obtendo em sua saída o sinalv
0 qr que será somado ao termo⇣ωslLrσiadr+ωsl
⇣
Lm Lsλs
⌘⌘
, resultando na tensão de referência do eixo em quadraturava⇤
qr.
Os sinais de tensões de referênciava⇤dr eva⇤qr passam pelo bloco transformador de co-ordenadas dq/abc que geram as tensões de referência v⇤
r1, v⇤r2 e v⇤r3. Essas tensões de
Capítulo 3
Controle Adaptativo por
Posicionamento de Pólos e Estrutura
Variável
A combinação de uma lei de controle por posicionamento de pólos com um estimador de parâmetros ou uma lei adaptativa, leva a um controle por posicionamento de polos adaptativo (APPC - Adaptive Pole Placement Control) e pode ser usado para controlar uma grande variedade de plantas lineares e invariantes no tempo de fase mínima ou não, com parâmetros conhecidos ou desconhecidos. Já a técnica de controle por estrutura variável (VSC) tem sua fundamentação no controle a relés, a qual utiliza uma lei de controle chaveada como função das variáveis de estado do sistema, e, em sua forma mais comum, de modo a restringir a dinâmica do sistema a uma superfície chamada superfície deslizante. Essa tem como principais características a rapidez no transitório e robustez a variações paramétricas e perturbações (dentro de uma faixa estipulada no projeto).
Dessa maneira, o VS-APPC agrega as características do APPC e do VSC, ou seja, a aplicabilidade a plantas de fase não-mínima, transitório rápido e robustez, no qual as leis adaptativas integrais foram substituídas por leis chaveadas.
3.1
Descrição do Método
Para a descrição do método considere a seguinte planta:
y=Zp(s)
Rp(s)=
b
s+au⇒y˙=−ay+bu (3.1)
na qual aebsão os parâmetros da planta conhecidos com incertezas. O objetivo deste
controlador adaptativo é estimaraeb, gerar um sinal de controleupara que a saída da
planta (y) tenda assintoticamente ao sinal de referênciare que os polos de malha fechada
sejam alocados nas raízes deA∗(s)(polinômio escolhido de acordo com os polos desejados
em malha fechada). Pode-se escrever (3.1) como
˙
˜
b = bˆ−b
Sendoaebconstantes, por hipótese, tem-se
˙˜ a = a˙ˆ
˙˜
b = b˙ˆ (3.7)
As leis de estimação por estrutura variável, utilizadas neste trabalho, para o cálculo de ˆ
ae ˆbsão
ˆ
a = −a¯·sgn(e0·y) +anom,
¯
a>|a−anom|
ˆ
b = b¯·sgn(e0·u) +bnom, ¯
b>|b−bnom|
(3.8)
na qual (sgn) é a função sinal, e0 é o erro de estimação, ¯a e ¯b são constantes da lei
de adaptação e, por fim, anom e bnom são valores nominais para os parâmetros a e b,
respectivamente.
3.2
Cálculo dos Parâmetros do Controlador
Utilizando o método polinomial, os parâmetros do controlador são calculados de acordo com a equação
Qm(s)L(s)Rp(s) +P(s)Zp(s) =A∗(s), (3.9)
em queQm(s) =s(referência tipo degrau),A∗(s) =s2+α1s+α0e obtém-seL(s) =1 e
P(s) =p1s+p0. Os parâmetros p1ep0são encontrados resolvendo a equação Diofantina
abaixo
s(s+a) + (p1s+p0)b=s2+α1s+α0, (3.10)
logo,
p1= α1−a
CAPÍTULO 3. VS-APPC 24
p0= α0
b . (3.12)
Como os parâmetros da planta são conhecidos com incertezas, o princípio da equiva-lência à certeza sugere o uso da mesma lei de controle, e logo os parâmetros do controla-dor são calculados como
ˆ
p1=α1−aˆ
ˆ
b , (3.13)
ˆ p0=
α0
ˆ
b , (3.14)
em que ˆp1e ˆp0são as estimativas dos parâmetros do controlador que precisam ser geradas
em tempo real. Assim, a função de transferência do controlador VS-APPC para uma referência degrau é dada por
Cd(s) = pˆ1s+pˆ0
s , (3.15)
tendo a mesma estrutura do controlador proporcional integrativo-PI,
CPI(s) =
k⇣s+τ1i ⌘
s . (3.16)
Neste caso, pode-se considerar o VS-APPC como um controlador PI adaptativo por posicionamento de pólos e estrutura variável. O sinal de controle discreto é calculado da seguinte maneira
P=pˆ1·e, I=Iant+pˆ0·eant·h, u=P+I, (3.17)
em que eé o erro entre a referência e a saída da planta (r−y), eant o erro anterior, P
a parte proporcional, I a parte integrativa, Iant a parte integrativa anterior eho período
de amostragem. As provas de estabilidade do VS-APPC para plantas de primeira ordem podem ser consultadas em Júnior (2005) e Santos (2007).
Para o projeto dos controladores PI clássicos da malha de controle do CLM utiliza-se as equações apresentadas no capítulo 2 no tópico 2.2.2. A Figura (4.1) ilustra as malhas internas de corrente do rotor juntamente com os controladores PI.
Figura 4.1:Malhas de controle das correntes do rotoriadreiaqr.
Observa-se na Figura (4.2) a malha de controle da velocidade. A malha externa de velocidade fornece a referência para a corrente do eixo em quadratura em configuração de controle em cascata.
CAPÍTULO 4. PROJETO DOS CONTROLADORES 26
Figura 4.2:Malha de controle da velocidade.
Figura 4.3:Malha de controle da potência reativa do estator.
Para a sintonia dos controladores obteve-se experimentalmente uma planta de primeira ordem para cada malha de controle. Este procedimento é feito aplicando uma entrada do tipo degrau à planta, desta maneira obtém-se a constante de tempo e o ganho da planta . Os parâmetros foram ajustados por alocação de pólos e são mostrados na Tabela (4.1).
PI Kc τi
1 0.01 0.1 Malha da potência reativa 2 0.5 0.01 Malha da corrente do rotor
3 0.004 5 Malha de velocidade
4 0.5 0.01 Malha da corrente do rotor
Tabela 4.1:Parâmetros dos controladores PI.
4.2
VS-APPC
Os parâmetros do controlador VS-APPC foram calculados de acordo com o Capítulo (3). Devido a não linearidade e complexidade do DFIG, o polinômioA∗(s)foi obtido a
p1=Kc=0.01=
0.2−a
b , (4.2)
p0= Kc
τi =0.1=
0.2
b , (4.3)
em que encontra-sea=0.18 eb=2, e portanto, ¯a=0.036 e ¯b=0.4. Já para o controlador de velocidade:
p1=Kc=0.004= 0.2−a
b , (4.4)
p0= Kc
τi =0.0008=
0.2
b , (4.5)
em que encontra-sea=−0.8 eb=250, e portanto, ¯a=0.16 e ¯b=50. Finalmente, para os controladores das malhas de correntesidr eiqr, tem-se
p1=Kc=0.5=
0.2−a
b , (4.6)
p0= Kc
τi =50=
0.2
b , (4.7)
em que encontra-sea=0.1980 eb=0.004, e portanto, ¯a=0.0396 e ¯b=0.0008. A tabela (4.2) mostra um resumo dos parâmetros dos controladores VS-APPC aplica-dos neste trabalho.
VS-APPC p1 p0 a b a¯ b¯
1 0.01 0.1 0.18 2 0.036 0.4 Malha da potência reativa
2 0.5 50 0.198 0.004 0.0396 0.0008 Malha da corrente do rotor
3 0.004 0.0008 -0.8 250 -0.16 50 Malha de velocidade
4 0.5 50 0.198 0.004 0.0396 0.0008 Malha da corrente do rotor
Capítulo 5
Resultados de Simulação
Neste capítulo são apresentados os resultados das simulações para o controlador PI e o VS-APPC, cujo principal objetivo é analisar e validar a utilização do controlador proposto para esta aplicação específica, analisando suas características, vantagens e desvantagens em relação ao controlador PI clássico. Os resultados de simulação foram obtidos através do software MATLAB, em que os parâmetros do sistema de conversão eólico estão apre-sentados no Anexo A e os parâmetros de simulação e inicialização do sistema no Anexo B. Os ganhos dos controladores foram apresentados no capítulo 4.
5.1
Regime Permanente
Para análise do sistema em regime permanente, o sistema foi submetido a uma velo-cidade de referência ωm∗=360rad/s. Os resultados de simulação do controlador
VS-APPC e do controlador PI são apresentados nas Figuras (5.1) - (5.7).
A Figura (5.1) mostra o comportamento da velocidade mecânica com o controlador VS-APPC, apresentando um nível de sobressinal de 19%, evidenciando um melhor de-sempenho quando comparado com o controlador PI, que possui um nível de sobressinal de 36%. O controlador VS-APPC possui um tempo de acomodação de 16 segundos, contra 22 segundos do controlador PI.
As Figuras (5.2) e (5.3) apresentam as correntesdqdo rotor no referencial do fluxo do estator, ou seja, (iadreiaqr), e as Figuras (5.4) e (5.5) representam as correntesdqdo estator (iads eiaqs). Observa-se uma diminuição do sobressinal das correntes do rotor e do estator com o controlador VS-APPC quando comparado com o controlador PI.
As Figuras (5.6) e (5.7) exibem os resultados de simulação da potência reativa e ativa no estator, respectivamente. Observa-se que a potência ativa é negativa, indicando que a máquina opera como gerador. Já a potência reativa é nula, ou seja, seguindo a referência imposta aos controladores,Q∗
Figura 5.1: Velocidade mecânica.
5.2
Avaliação de Robustez e Desempenho
Para os testes de robustez variou-se os parâmetros internos (resistências e indutâncias) entre 10% e 25% em relação aos parâmetros nominais da máquina DFIG. Ao mesmo tempo, mudou-se a referência de velocidade de 360 rad/s para 380 rad/s emt =50 segundos (após a estabilização do sistema).
A Figura (5.8) mostra que o comportamento da velocidade mecânica com o contro-lador VS-APPC é mais rápida que a resposta com o controcontro-lador PI, com uma diferença significativa de 29 segundos, além de amortecer as oscilações.
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 30
Figura 5.2:Componentedda corrente do rotor-idr
Figura 5.4:Componentedda corrente do estator-ids
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 32
Figura 5.6:Potência Reativa
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 34
Figura 5.9:Componentedda corrente do rotor-idr
Figura 5.11:Componentedda corrente do estator-ids
CAPÍTULO 5. RESULTADOS DE SIMULAÇÃO 36
Figura 5.13:Potência Reativa
tensão"back-to-back"com modulação PWM.
A modelagem matemática do DFIG foi apresentada através dos procedimentos clás-sicos. Para o controle do conversor foi utilizado o controle orientado pelo campo.
Os controladores PIs clássicos são tradicionalmente utilizados no controle do DFIG e os ganhos são ajustados por tentativa e erro, Ziegler-Nichols ou alocação de pólos. O ajuste "intuitivo"desses ganhos não é uma tarefa trivial, necessitando o conhecimento do comportamento dinâmico do sistema eólico. Ademais, seus parâmetros devem ser re-ajustados para diferentes condições de operação. No entanto, esses controladores são utilizados pois evitam trabalhar com controladores não-lineares e são de simples de im-plementação. Todavia, essa estrutura não garante a robustez em relação a variações para-métricas.
O controlador proposto neste trabalho foi o VS-APPC, que agrega as características do controle adaptativo por posicionamento de pólos (APPC) e do controle por estrutura variável (VSC). Este controlador mostrou-se robusto às incertezas paramétricas, às dinâ-micas não modeladas e às perturbações limitadas, além do bom desempenho em relação à rejeição do erro de rastreamento. Quando comparado ao PI, o controlador proposto redu-ziu o sobre sinal e obteve um amortecimento mais rápido ou igual ao PI. Desta maneira, acredita-se que o controlador apresentado possa contribuir para a melhoria do desempe-nho da estabilidade dinâmica e transitória do DFIG integrado à rede elétrica.
Em um parque eólico, no qual vários geradores operam simultaneamente o máximo de tempo possível, pequenos ganhos em termos de estabilidade e rendimento fazem grande diferença em termos estruturais e econômicos.
Referências Bibliográficas
A. D. Hansen, Clemens Jauch, P. Sorensen, F. Iov & Frede Blaabjerg. (2003), ‘Dyna-mic wind turbine models in power system simulation tool digsilent’,Risø National Laboratory.
Alfeu Sguarezi Filho, M. E. Oliveira Filho & E. Ruppert Filho (2008), ‘A deadbeat active and reactive power control for doubly-fed induction generator’,INDUSCON.
Anaya-Lara, O., N. Jenkins, J. Ekanayake & P. Cartwright (2009),Wind energy genera-tion: modelling and control, John Wiley & Sons.
Barros, Luciano Sales (2006), Uma Estratégia de Controle para o Melhoramento do Com-portamento Dinâmico de Máquinas de Indução Duplamente Alimentadas Operando como Geradores Eólicos, Tese de doutorado, Universidade Federal de Campina Grande.
Belfedal, C., S. Gherbi, M. Sedraoui, S. Moreau, G. Champenois, T. Allaoui & M.A. Denaï (2010), ‘Robust control of doubly fed induction generator for stand-alone applications’,Electric Power Systems Research80(2), 230 – 239.
Cardenas, R., R. Pena, S. Alepuz & G. Asher (2013), ‘Overview of control systems for the operation of dfigs in wind energy applications’, Industrial Electronics, IEEE Transactions on60(7), 2776–2798.
Costa, Jean Patric (2010), Contribuição ao estudo do gerador de indução duplamente alimentado: operação durante distúrbios na rede elétrica., Tese de doutorado, Uni-versidade Federal de Santa Maria.
Dong, Baohua, S. Asgarpoor & Wei Qiao (2011), Ann-based adaptive pi control for wind turbine with doubly fed induction generator, em ‘North American Power Sympo-sium (NAPS), 2011’, pp. 1–6.
Fernando D. Bianchi, Hernán de Battista, Ricardo J. Mantz (2006),Wind Turbine Control Systems: Principles, Modelling and Gain Scheduling Design (Advances in Indus-trial Control), Springer.
Harris, Benjamin J. (2009), Matrix converter technology in doubly-fed induction genera-tors for wind generagenera-tors, Dissertação de mestrado, University of Wollongong.
James F. Manwell, Jon G. McGowan, Anthony L. Rogers (2010),Wind Energy Explained: Theory, Design and Application, 2aedição, WILEY.
Mishra, J. P., D. Hore & A. Rahman (2011), Fuzzy logic based improved active and re-active power control operation of dfig for wind power generation,em‘Power Elec-tronics and ECCE Asia (ICPE ECCE), 2011 IEEE 8th International Conference on’, pp. 654–661.
Muhando, E.B., T. Senjyu, A. Yona, H. Kinjo & T. Funabashi (2007), ‘Disturbance re-jection by dual pitch control and self-tuning regulator for wind turbine generator parametric uncertainty compensation’,Control Theory Applications, IET1(5), 1431 –1440.
Muller, S., M. Deicke & R.W. De Doncker (2002), ‘Doubly fed induction generator sys-tems for wind turbines’,Industry Applications Magazine, IEEE8(3), 26–33.
Nunes, Marcus Vinícius Alves (2003), Avaliação do Comportamento de Aerogeradores de Velocidade Fixa e Variável Integrados em Redes Elétricas Fracas, Tese de doutorado, UNIVERSIDADE FEDERAL DE SANTA CATARINA.
Oliveira, Rodrigo Gaiba (2009), Contribuição Ao Controle de Um Sistema de Geração a Velocidade Variável Utilizando Gerador de Indução Duplamente Excitado, Tese de doutorado, Universidade Federal de Minas Gerais.
Pao, L.Y. & K.E. Johnson (2011), ‘Control of wind turbines’, Control Systems, IEEE 31(2), 44 –62.
Paul C. Krause, Oleg Wasynczuk, Scott D. Sudhoff (2002),Analysis of Electric Machi-nery and Drive Systems, 2aedição, WILEY.
Pena, R., J.C. Clare & G.M. Asher (1996), ‘Doubly fed induction generator using back-to-back pwm converters and its application to variable-speed wind-energy generation’, Electric Power Applications, IEE Proceedings -143(3), 231–241.
REFERÊNCIAS BIBLIOGRÁFICAS 40
Qiao, Wei, Wei Zhou, J.M. Aller & R.G. Harley (2008), ‘Wind speed estimation based sensorless output maximization control for a wind turbine driving a dfig’, Power Electronics, IEEE Transactions on23(3), 1156–1169.
Runcos, Fredemar (2006), Modelagem, Projeto e Análise de Máquinas Assíncronas Tri-fásicas Duplamente Alimentadas Sem Escovas, Tese de doutorado, Universidade Federal de Santa Catarina.
Santos, Marcelo Brandão (2007), Avaliação de robustez, desempenho e aplicação do con-trolador adaptativo por posicionamento de polos e estrutura variável, Dissertação de mestrado, Universidade Federal do Rio Grande do Norte.
Sguarezi Filho, A.J. & E.R. Filho (2012), ‘Model-based predictive control applied to the doubly-fed induction generator direct power control’,Sustainable Energy, IEEE Transactions on3(3), 398–406.
Silva, Kleber Freire da (2006), Controle e integração de centrais eólicas à rede elétrica com geradores de indução duplamente alimentados., Tese de doutorado, USP.
Soliman, M., O.P. Malik & D.T. Westwick (2011), ‘Multiple model multiple-input multiple-output predictive control for variable speed variable pitch wind energy con-version systems’,Renewable Power Generation, IET5(2), 124 –136.
Spera, David A. (June, 2009),Wind Turbine Technology: Fundamental Concepts in Wind Turbine Engineering, Second Edition, ASME.
Tony Burton, David Sharpe, N. Jenkins & E. Bossanyi (2001),Wind energy: handbook, 1aedição, WILEY.
Ullah, Nayeem Rahmat (2006), ‘Grid reinforcing wind generation’.
Vieira, J. P A, M. V A Nunes, U.H. Bezerra & A.C. do Nascimento (2009), ‘Designing optimal controllers for doubly fed induction generators using a genetic algorithm’, Generation, Transmission Distribution, IET3(5), 472–484.
Wang, Yun, Dongli Zhao, Bin Zhao & Honghua Xu (2008), A new type of control strategy of dfig in wind power system based on smc,em‘Electrical Machines and Systems, 2008. ICEMS 2008. International Conference on’, pp. 2428–2431.
Wong, K. C., S.L. Ho & K. W. E. Cheng (2009), ‘Direct control algorithm for doubly fed induction generators in weak grids’, Electric Power Applications, IET 3(4), 371– 380.
Parâmetro Valor Unidade
Potência 2000 W
Resistência no Estator (Rs) 3 Ohms
Resistência no Rotor (Rr) 2,9876 Ohms
Indutância de dispersão do Estator (Lls) 0,0149 H Indutância de dispersão do Rotor (Llr) 0,015 H
Indutância Mútua (Lm) 0,015 H
Constantes de Inércia (HT) 0,01
-Coeficiente de Inércia no eixo (Dt) 0,015 Nms/(rad)
Tensão Nominal (Vnom) 220 V
Corrente Nominal (Inom) 3,66 A
Conjugado (Tnom) 6,36 Nm
Velocidade Nominal (ωnom) 377 rad/s
Frequência (fs) 60 Hz
-Apêndice B
Parâmetros de Simulação e
Inicialização
Parâmetros da simulação
Descrição Variáveis Unidade
Passo de integração h=0,0001
-Velocidade do estator ωs=2πf rad/s
Frequência f s=60 Hz
Tensão no estator vds=60 V
vqs=0 V
Parâmetros iniciais do sistema
Descrição Variáveis
Velocidade do rotor ωr(0) =0,0002
Fluxo do estator λds=0,0000
λqs=0,0000
Fluxo do rotor λdr=
−0,6055
λqr=0,0000
[Yσ1 Yσ2 Yσ3] ,Yσdq0= [Yσd Yσq Yσ0] ePé a matriz transformação definida por P= q 2 3 2 6 6 6 6 6 4 √ 2
2 cos(δp) −sin(δp)
√
2
2 cos(δp−2 π
3) −sin(δp−2 π 3)
√
2
2 cos(δp+ 2π
3) −sin(δp+23π)
3 7 7 7 7 7 5
em que δp é o ângulo de transformação genérico: δp=δgpara as grandezas do estator
da máquina ou da rede e δp=δg
−δr para as grandezas do rotor da máquina. Quando
δg=0 as grandezasdq0 da máquina ou da rede estão no referencial estacionário e quando
δg=δa as grandezasdq0 da máquina estão no referencial do rotor. As referências
![Figura 1.1: Capacidade total instalada até o final de Junho de 2011 [MW]. Fonte: WWEA](https://thumb-eu.123doks.com/thumbv2/123dok_br/15545530.93254/14.892.275.656.209.505/figura-capacidade-total-instalada-final-junho-fonte-wwea.webp)